自車速測量中的目標檢測與跟蹤技術
2015-07-21 06:11:01孫浩
科技與創新 2015年12期
孫浩

摘 要:隨著現代智能交通系統的發展,如何快速、精確地測量車輛速度已經成為了熱點問題,而測量行駛中的車輛自身的車速更是一個相對新穎和空白的領域。提出了一種主動式測量車輛自身速度的方法,它是利用基于視頻的目標檢測與跟蹤技術、紋理模板匹配的算法和DSP技術,實現了實時測量。
關鍵詞:速度測量;目標檢測;目標跟蹤;模板匹配
中圖分類號:TP391.41 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2015.12.010
隨著科學技術的發展,機動車輛已經成為了出行的重要交通工具。車輛速度作為車輛運行狀態的重要參數之一,具有重要的研究價值。目前,對車輛速度的檢測主要分為兩大類,即被動式檢測和主動式檢測。本文針對現有的主動式測量方式中存在的問題,提出了一種基于視頻的車輛速度測量方法。
1 自車速測量技術
車輛速度測量的首要條件是找到測量基準點,一般以車輛側方相對靜止的事物為基準點。在激光測距儀距離測量的基礎上,利用視頻檢測和跟蹤技術實現對車輛速度的測量。
1.1 測量的基本原理
將攝像頭和測距儀安裝在車輛行駛方向的垂線上,并保證二者的同軸狀態。當被檢測車輛進入攝像頭的拍攝范圍時,可以自動或者人為地檢測出目標,然后使用模板匹配算法跟蹤;當車輛行駛到中間位置時,激光測距儀會測得車輛的距離,并且記錄下當前時間。隨著車輛的繼續行駛,可以利用像素數計算車輛偏離位置中線的角度,利用直角三角形原理計算車輛的行駛距離,然后再根據運行時間最終計算出車輛行駛的速度。
1.2 測量的數據流程圖
車輛自速度測量的數據流程如圖1所示。
2 基于視頻的紋理模板匹配算法
模板匹配算法是現今圖像處理領域常用的一種檢測和跟蹤方法,它是模式識別和目標跟蹤的重要研究領域。該算法的基本思想是先建立一個已知目標的模板,并根據模板的特性提取模板的特征,然后在待檢測的圖像中根據相應的特征來識別所需信息,將最符合特征的圖像部分認定為目標部分。這種技術常常應用于人臉檢測和車牌識別等領域。常用的特征模板有基于顏色域的模板、基于特征向量的模板和基于紋理特征的模板等。由于本文的車輛檢測算法中需要使用灰度圖像,而且對識別目標的普適性和實時性要求比較高,所以,選用基于紋理特征的模板匹配算法。
2.1 基于紋理特征的模板匹配算法
算法的基本思路是:
首先,將目標模板按行列方向分別提取紋理矩陣:
;
. (1)
式(1)中:H為垂直紋理矩陣;m為模板;u為橫坐標;v為縱坐標;L為水平紋理矩陣。
將圖像分別按行列方向提取紋理矩陣:
. (2)
式(2)中:H為垂直紋理矩陣;s為源圖像;i為橫坐標;j為縱坐標;L為水平紋理矩陣。
計算圖像各像素點的相似度,即:
;
;
. (3)
式(3)中:βH為垂直紋理相似度;βL為水平紋理相似度;M為圖像寬度;N為圖像高度。
經過上述分析可知,最佳匹配位置是相似度最大的點。
2.2 基于DSP技術對算法進行的改進
在算法中,模板圖像與目標圖像之間匹配時,置信度計算是十分復雜的,預算量越大,運行時間越長。因此,本文針對算法中存在的問題進行了改進。
在提取模板圖像和目標圖像2個方向的二值紋理矩陣之前,每個像素用1個字節(8 bits)二進制碼表示,而二值化后每個像素可用1 bit二進制碼表示。提取了二值紋理矩陣后,雖然模板圖像與目標圖像分別變換為2個方向上的矩陣,但是,其存儲量可減小為原來的1/8,極大地節省了存儲的空間。
在算法中引入邏輯運算,將相似度的計算改為同或和累加運算,而且這步可以并行實現,即:
. (4)
上述操作可以利用DSP處理,在完成了計算任務的基礎上,可以節約大量的時間。
3 目標檢測算法
由于激光測距儀和攝像機的安裝位置是固定的,所以,可以事先調整安裝位置,從而得到激光命中點在圖像中的位置。如果使用高速激光測距儀,就可以得到車輛行駛時距離目標的特征信息,進而得到激光命中目標的準確時刻,然后根據這時刻前后2幀圖像對不同的模板進行迭代匹配,即可得到準確的目標圖像,然后利用目標圖像建立模板,在后續的視頻圖像中進行跟蹤。
激光測距儀掃描過樹木時的數據如圖2所示。
從圖2中可以看出,利用高頻率的激光測距儀數據可以得出激光經過目標的時間。其計算原理如圖3所示。
圖2 激光數據圖
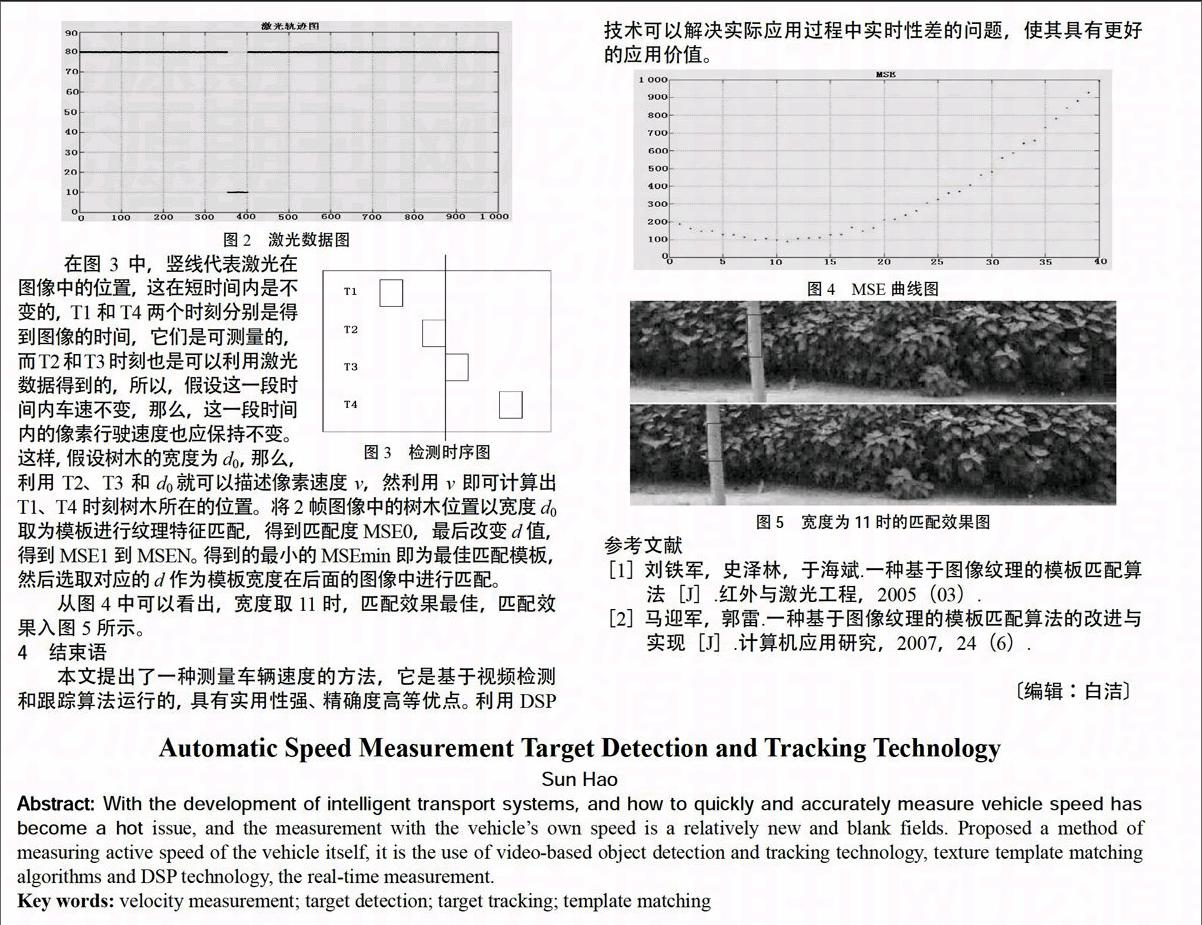
在圖3中,豎線代表激光在圖像中的位置,這在短時間內是不變的,T1和T4兩個時刻分別是得到圖像的時間,它們是可測量的,而T2和T3時刻也是可以利用激光數據得到的,所以,假設這一段時間內車速不變,那么,這一段時間內的像素行駛速度也應保持不變。這樣,假設樹木的寬度為d0,那么,利用T2、T3和d0就可以描述像素速度v,然利用v即可計算出T1、T4時刻樹木所在的位置。將2幀圖像中的樹木位置以寬度d0取為模板進行紋理特征匹配,得到匹配度MSE0,最后改變d值,得到MSE1到MSEN。得到的最小的MSEmin即為最佳匹配模板,然后選取對應的d作為模板寬度在后面的圖像中進行匹配。
從圖4中可以看出,寬度取11時,匹配效果最佳,匹配效果入圖5所示。
4 結束語
本文提出了一種測量車輛速度的方法,它是基于視頻檢測和跟蹤算法運行的,具有實用性強、精確度高等優點。利用DSP
技術可以解決實際應用過程中實時性差的問題,使其具有更好的應用價值。
圖4 MSE曲線圖
圖5 寬度為11時的匹配效果圖
參考文獻
[1]劉鐵軍,史澤林,于海斌.一種基于圖像紋理的模板匹配算法[J].紅外與激光工程,2005(03).
[2]馬迎軍,郭雷.一種基于圖像紋理的模板匹配算法的改進與實現[J].計算機應用研究,2007,24(6).
〔編輯:白潔〕
