基于位姿分離法的模塊化機(jī)械臂逆運(yùn)動(dòng)學(xué)分析
2015-07-24 18:41:57雷靜桃戴文杰
雷靜桃,戴文杰
(上海大學(xué)機(jī)電工程與自動(dòng)化學(xué)院,上海 200072)
基于位姿分離法的模塊化機(jī)械臂逆運(yùn)動(dòng)學(xué)分析
雷靜桃,戴文杰
(上海大學(xué)機(jī)電工程與自動(dòng)化學(xué)院,上海 200072)
分析了7自由度冗余機(jī)械臂的運(yùn)動(dòng)學(xué)正逆解,采用Denavit-Hartenberg(D-H)坐標(biāo)法進(jìn)行正運(yùn)動(dòng)學(xué)建模,獲得機(jī)械臂末端相對(duì)于基座的空間位姿;采用位姿分離法進(jìn)行逆運(yùn)動(dòng)學(xué)建模.求位置逆解時(shí),由約束條件分別獲得前4個(gè)關(guān)節(jié)角位移解析解;求姿態(tài)逆解時(shí),采用歐拉角表示機(jī)械臂末端相對(duì)于基座的姿態(tài),減少了計(jì)算量.以SCHUNK模塊化7自由度機(jī)械臂為例,進(jìn)行了運(yùn)動(dòng)學(xué)正逆解分析,并基于虛擬樣機(jī)進(jìn)行了仿真驗(yàn)證.
7自由度;冗余機(jī)械臂;逆運(yùn)動(dòng)學(xué);位姿分離法
7自由度機(jī)械臂屬于冗余自由度機(jī)械臂[1].在機(jī)械臂末端(以下簡(jiǎn)稱末端)位姿確定的情況下,非冗余機(jī)械臂的關(guān)節(jié)變量和末端位姿是一一對(duì)應(yīng)的.而冗余機(jī)械臂和非冗余機(jī)械臂最大的區(qū)別就在于自運(yùn)動(dòng)特性[2].同樣在末端位姿確定的情況下,冗余自由度機(jī)械臂有多組關(guān)節(jié)角與之相對(duì)應(yīng),這就可以避開某些受限的關(guān)節(jié)角.7自由度機(jī)械臂因其具有避障、避奇異點(diǎn)、靈活性好等優(yōu)點(diǎn)[3],因此得到廣泛應(yīng)用.7自由度機(jī)械臂末端位姿對(duì)應(yīng)多組逆解,求解7自由度機(jī)械臂逆解有一定難度,主要分析方法有梯度投影法[4]、神經(jīng)網(wǎng)絡(luò)算法[5]、遺傳算法[6]等.文獻(xiàn)[7]提出了第4個(gè)關(guān)節(jié)角的額外約束,運(yùn)用了較多的矩陣變換.文獻(xiàn)[8]采用位姿分離法求解機(jī)械臂正逆解,用9個(gè)參數(shù)表示末端姿態(tài).
本研究采用位姿分離法分析機(jī)械臂逆運(yùn)動(dòng)學(xué).首先,采用Denavit-Hartenberg(D-H)坐標(biāo)法進(jìn)行正運(yùn)動(dòng)學(xué)建模,姿態(tài)逆解時(shí)采用歐拉角表示末端相對(duì)于基座的姿態(tài),將姿態(tài)變量減為3個(gè),從而減少了計(jì)算量.
1 正運(yùn)動(dòng)學(xué)分析
機(jī)械臂正運(yùn)動(dòng)學(xué)即根據(jù)機(jī)械臂的各關(guān)節(jié)變量求解機(jī)械臂末端的位姿.在機(jī)械臂各連桿上建立D-H坐標(biāo)系,計(jì)算相鄰連桿間的齊次坐標(biāo)變換矩陣,進(jìn)而計(jì)算機(jī)械臂末端相對(duì)于基座的齊次變換矩陣.
1.1 連桿坐標(biāo)系及參數(shù)表
模塊化機(jī)械臂由若干單自由度模塊化關(guān)節(jié)和連桿串聯(lián)而成,7自由度機(jī)械臂有7個(gè)關(guān)節(jié),初始狀態(tài)為機(jī)械臂豎直向上的展開狀態(tài).
通過(guò)7自由度機(jī)械臂建立D-H坐標(biāo)系(見圖1),自下而上為機(jī)械臂的每個(gè)關(guān)節(jié)編號(hào)1~7, Oi表示各個(gè)坐標(biāo)系原點(diǎn),其中O1和O2重合,O3和O4重合,O5,O6和O7重合.第1,3,5,7關(guān)節(jié)的旋轉(zhuǎn)軸線均垂直于地面,第2,4,6關(guān)節(jié)的旋轉(zhuǎn)軸線與地面平行,其中第5,6,7關(guān)節(jié)的旋轉(zhuǎn)軸線相交于一點(diǎn).

圖1 D-H坐標(biāo)系Fig.1 D-H coordinate systems
1.2 機(jī)械臂正運(yùn)動(dòng)學(xué)
根據(jù)D-H坐標(biāo)系,D-H參數(shù)如表1所示.相鄰兩連桿齊次坐標(biāo)變換矩陣通式為

式中,ai?1,αi?1,di,θi為一組D-H參數(shù),cθi=cosθi,sθi=sinθi.

表1 D-H坐標(biāo)系參數(shù)Table 1 D-H coordinate parameters
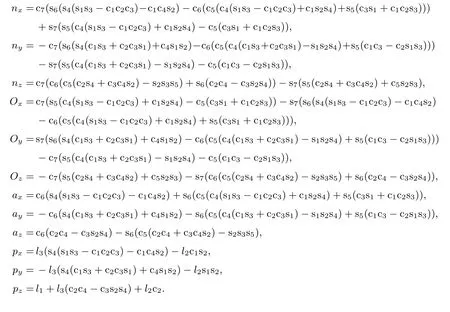
由式(1)依次計(jì)算機(jī)械臂相鄰兩連桿間的齊次坐標(biāo)變換矩陣,則機(jī)械臂末端相對(duì)于基座的齊次坐標(biāo)變換矩陣為

式中,


其中ci=cosθi,si=sinθi,i=1,2,…,7.07T中各元素參見附錄A.
2 逆運(yùn)動(dòng)學(xué)分析
機(jī)械臂的逆運(yùn)動(dòng)學(xué)分析,即已知機(jī)械臂末端空間位姿,求解各關(guān)節(jié)變量,通常采用反變換法、幾何法和解析法等.7自由度機(jī)械臂運(yùn)動(dòng)學(xué)逆解是研究難點(diǎn)之一.從式(2)中的px,py, pz可以看出,機(jī)械臂末端位置只與前4個(gè)關(guān)節(jié)變量有關(guān),θ5,θ6,θ7與機(jī)械臂末端的空間位置無(wú)關(guān),僅與機(jī)械臂末端的空間姿態(tài)有關(guān).故可采用位姿分離法進(jìn)行7自由度機(jī)械臂逆運(yùn)動(dòng)學(xué)分析.
2.1 機(jī)械臂位置逆解
由于7自由度機(jī)械臂是冗余的,因此進(jìn)行逆運(yùn)動(dòng)學(xué)分析時(shí),除了需給定末端位姿外,還需增加機(jī)械臂的一個(gè)約束條件.最簡(jiǎn)單的方法即指定一個(gè)冗余關(guān)節(jié),其關(guān)節(jié)角位移可以是轉(zhuǎn)動(dòng)范圍內(nèi)的任意值.
前4個(gè)關(guān)節(jié)變量中第4關(guān)節(jié)變量可基于O1和O7的坐標(biāo)用解析法直接求得,而第1,2關(guān)節(jié)都會(huì)對(duì)末端位置產(chǎn)生直接影響,因此選取第3關(guān)節(jié)為冗余關(guān)節(jié).
下面根據(jù)機(jī)械臂末端位置和θ3來(lái)求解θ1,θ2,θ4.
(1)關(guān)節(jié)變量θ4.由于機(jī)械臂的第2,4關(guān)節(jié)和末端關(guān)節(jié)的中心始終在同一平面上,因此可以采用幾何解析法求解θ4(見圖2).

圖2 運(yùn)動(dòng)學(xué)逆解示意圖Fig.2 Schematic diagram of inverse kinematics
圖2所示的△O2O4O5中,采用余弦定理可求出∠O2O4O5,則由θ4和∠O2O4O5的互補(bǔ)關(guān)系可求得

式中,l1=O0O2,l2=O2O4,l3=O4O5,末端位置坐標(biāo)為(px,py,pz).
(2)關(guān)節(jié)變量θ2.由式(2)中

(3)關(guān)節(jié)變量θ1.由式(2)中

2.2 機(jī)械臂姿態(tài)逆解
下面根據(jù)期望的機(jī)械臂末端姿態(tài),求解關(guān)節(jié)變量θ5,θ6和θ7.設(shè)定z-y-z歐拉角(α,β,γ)表示機(jī)械臂末端相對(duì)于基座的空間姿態(tài),則用歐拉角表示的末端相對(duì)于基座的齊次變換矩陣為


求得.由

為已知,可求得θ5,θ6和θ7,即

式中,


假設(shè)機(jī)械臂末端的空間姿態(tài)即歐拉角已知,則由式(6)可確定關(guān)節(jié)變量θ5,θ6,θ7.
2.3 計(jì)算示例
2.3.1 機(jī)械臂結(jié)構(gòu)參數(shù)
以SCHUNK公司的模塊化7自由度機(jī)械臂為例,根據(jù)期望末端空間位姿,通過(guò)運(yùn)動(dòng)學(xué)逆解計(jì)算各關(guān)節(jié)角位移.7自由度機(jī)械臂結(jié)構(gòu)如圖3所示.機(jī)械臂結(jié)構(gòu)參數(shù)為l1= 293.5 mm,l2=340.0 mm,l3=294.5 mm.

圖3 模塊化7自由度機(jī)械臂Fig.3 Modular 7-DOF manipulator
2.3.2 末端期望空間位姿
選擇機(jī)械臂末端點(diǎn)為第5,6,7關(guān)節(jié)回轉(zhuǎn)軸線的交點(diǎn),末端姿態(tài)用歐拉角表示.機(jī)械臂初始狀態(tài)為豎直展開狀態(tài).
(1)設(shè)定末端期望位置.設(shè)末端期望運(yùn)動(dòng)軌跡共100 s,由以下3個(gè)分段函數(shù)組成:當(dāng)0 ≤ t<40時(shí),

當(dāng)40 ≤ t<60時(shí),

當(dāng)60 ≤ t ≤ 100時(shí),

機(jī)械臂末端期望運(yùn)動(dòng)軌跡如圖4所示.
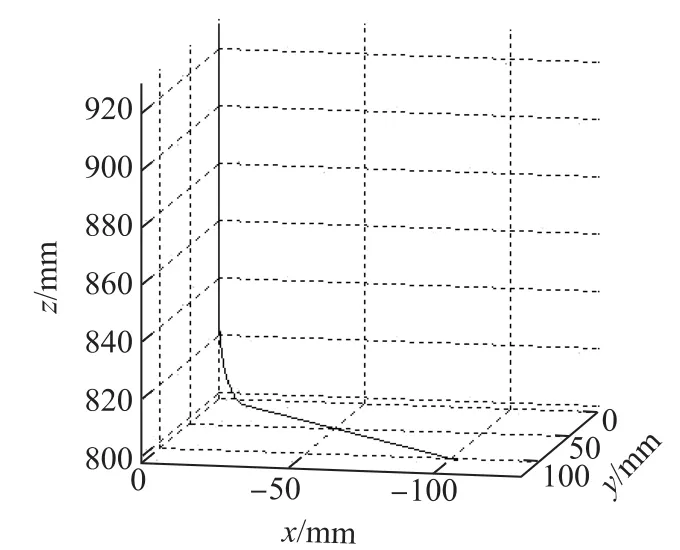
圖4 設(shè)定的末端軌跡Fig.4 Predefined track of the end-effector
(2)設(shè)定末端期望姿態(tài).機(jī)械臂末端姿態(tài)用歐拉角表示,設(shè)定歐拉角如下:當(dāng)0 6 t< 40時(shí),

當(dāng)40 ≤ t<60時(shí),

當(dāng)60 ≤ t ≤ 100時(shí),
設(shè)定的機(jī)械臂末端姿態(tài)變化如圖5所示.

圖5 設(shè)定的末端姿態(tài)Fig.5 Predefined pose of end-effector
2.3.3 逆解計(jì)算
根據(jù)機(jī)械臂末端期望位姿,計(jì)算各關(guān)節(jié)變量隨時(shí)間的變化曲線如圖6所示.可以看出,各關(guān)節(jié)角位移連續(xù)無(wú)突變,可以滿足機(jī)械臂運(yùn)動(dòng)平穩(wěn)性的要求.

圖6 各關(guān)節(jié)角位移Fig.6 Angle displacement of each joint
3 逆運(yùn)動(dòng)學(xué)仿真驗(yàn)證
以SCHUNK模塊化7自由度機(jī)械臂為例,基于虛擬樣機(jī)技術(shù)進(jìn)行逆運(yùn)動(dòng)學(xué)建模仿真驗(yàn)證.將機(jī)械臂三維模型導(dǎo)入ADAMS建模與仿真軟件中,定義各連桿和關(guān)節(jié)的約束關(guān)系,添加各關(guān)節(jié)運(yùn)動(dòng)驅(qū)動(dòng)函數(shù),用STEP函數(shù)表示,仿真周期為100 s.機(jī)械臂虛擬樣機(jī)模型如圖7所示.
虛擬樣機(jī)仿真結(jié)果即末端空間位置在基坐標(biāo)系中沿各坐標(biāo)運(yùn)動(dòng)軌跡,以及用歐拉角表示的末端空間姿態(tài)如圖8所示.

圖7 機(jī)械臂仿真模型Fig.7 Simulation model of manipulator
通過(guò)機(jī)械臂虛擬樣機(jī)仿真,得到末端運(yùn)動(dòng)軌跡在3個(gè)坐標(biāo)軸上的投影,如圖8(a)和(b)所示.與圖4設(shè)定的期望軌跡對(duì)比,可以看出:理論計(jì)算與仿真結(jié)果一致.
通過(guò)機(jī)械臂虛擬樣機(jī)仿真,獲得的機(jī)械臂末端姿態(tài)用歐拉角表示,如圖8(c)所示.與圖5設(shè)定的期望姿態(tài)對(duì)比,可以看出:理論計(jì)算與仿真結(jié)果基本一致.

圖8 ADAMS仿真結(jié)果Fig.8 Simulation results in ADAMS
4 結(jié)束語(yǔ)
冗余機(jī)械臂能提高機(jī)械臂的靈活性,但會(huì)增加機(jī)械臂逆運(yùn)動(dòng)學(xué)求解難度.本研究采用位姿分離法,求解7-DOF機(jī)械臂逆運(yùn)動(dòng)學(xué)解析解.求姿態(tài)逆解時(shí),采用3個(gè)歐拉角描述姿態(tài),減少了運(yùn)算量.以SCHUNK機(jī)械臂為例,進(jìn)行運(yùn)動(dòng)學(xué)正逆解分析,并基于虛擬樣機(jī)技術(shù)進(jìn)行了仿真驗(yàn)證.
[1]陳鵬,劉璐.一種仿人機(jī)械臂的運(yùn)動(dòng)學(xué)逆解的幾何求解方法[J].機(jī)器人,2012,34(2):211-216.
[2]Dagraca M M,Fernando B M D,Machado J A T.Fractional dynamics in the trajectory control of redundant manipulators[J].Communications in Nonlinear Science and Numerical Simulation,2008,13(9):1836-1844.
[3]張秋毫,孫漢旭,葉平,等.冗余度機(jī)器人附加速度避障方法[J].機(jī)電產(chǎn)品開發(fā)與創(chuàng)新,2004,17(3): 4-6.
[4]趙建文,李來(lái)航,左志遠(yuǎn).冗余度機(jī)器人梯度投影逆解算法的改進(jìn)[J].機(jī)械科學(xué)與技術(shù),2009,28(5): 618-621.
[5]Yun Y S,Moon C.Comparison of adaptive genetic algorithm for engineering optimization problems[J].International Journal of Industrial Engineering,2003,10(4):584-590.
[6]Wang J P,Xu C S,Sun X J,et al.A novel genetic algorithm and its application in variable structure control of robot[J].Journal of Shanghai University:English Edition,2005,9(3): 255-260.
[7]王海,蔡鳳英,張為公.一種7DOF機(jī)械臂逆運(yùn)動(dòng)學(xué)解析算法及其應(yīng)用[J].江蘇大學(xué)學(xué)報(bào):自然科學(xué)版,2011,32(3):254-259.
[8]徐俊虎,欒楠,張?jiān)娎?等.7自由度機(jī)械臂的運(yùn)動(dòng)學(xué)逆解與優(yōu)化[J].機(jī)電一體化,2011,6:28-33.
附錄A
Inverse kinematics analysis of modular manipulator by separating attitude from position
LEI Jing-tao,DAI Wen-jie
(School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200072,China)
The kinematics for a 7-DOF(degrees of freedom)redundant manipulator is analyzed.The Denavit-Hartenberg(D-H)method is used to analyze forward kinematics. Position and attitude of the end-effector with respect to the base are obtained.Attitude is separated from position in analyzing inverse kinematics.For the position inverse kinematics,angular-displacement of the former four joints is obtained under a constraint condition. For the attitude inverse kinematics,the Euler angles are used to describe attitude of the end-effector with respect to the base.This way,the calculation is reduced.For the modular 7-DOF manipulator produced by SCHUNK,kinematics is analyzed and verified by virtual prototyping simulation.
7-DOF;redundant manipulator;inverse kinematics;separating attitude from position
TP 242
A
1007-2861(2015)05-0588-10
10.3969/j.issn.1007-2861.2014.02.015
2013-12-06
國(guó)家高技術(shù)研究發(fā)展計(jì)劃(863計(jì)劃)子課題資助項(xiàng)目(SS2012AA041604)
雷靜桃(1970—),女,副教授,研究方向?yàn)闄C(jī)器人技術(shù).E-mail:jtlei2000@163.com
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
電腦報(bào)(2020年35期)2020-09-17 13:25:53
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國(guó)核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
