基于SVM的永磁同步電機直接轉矩控制
2015-07-24 18:41:57楊影韓冰陳鑫涂小衛
上海大學學報(自然科學版) 2015年5期
楊影,韓冰,陳鑫,涂小衛
(上海大學機電工程與自動化學院,上海 200072)
基于SVM的永磁同步電機直接轉矩控制
楊影,韓冰,陳鑫,涂小衛
(上海大學機電工程與自動化學院,上海 200072)
參考電壓矢量的計算是基于空間矢量調制(space vector modulation,SVM)的永磁同步電機直接轉矩控制的核心研究之一.從電壓矢量對電磁轉矩的控制作用入手,分析指出有限的電壓矢量是直接轉矩控制中轉矩和磁鏈脈動大的根本原因.設計一種改進的基于空間矢量調制的直接轉矩控制系統,僅僅利用定子磁鏈角度、轉矩偏差和定子磁鏈偏差計算得到參考電壓矢量幅值和角度.該方案計算簡單,對電機參數不敏感.仿真和實驗結果表明,該方法結構簡單、魯棒性強,能夠明顯改善直接轉矩控制性能.
永磁同步電機;直接轉矩控制;空間矢量調制;轉矩脈動
永磁同步電機(permanent magnet synchronous motor,PMSM)直接轉矩控制(direct torque control,DTC)以其對電機參數依賴程度小、轉矩響應快、控制結構簡單[1-2]等優點而受到廣泛關注.
永磁同步電機傳統DTC利用6個有效矢量控制電磁轉矩和定子磁鏈,存在轉矩脈動大、逆變器開關頻率不恒定等問題,導致系統低速性能惡化[2].考慮到矢量控制中采用電壓空間矢量調制方法可以獲得更多的、連續變化的電壓矢量,所以將開關表直接轉矩控制中的滯環比較器和開關表用參考電壓計算單元和空間矢量調制取代,得到一種新的控制方案——空間矢量調制直接轉矩控制(space vector modulation-direct torque control,SVM-DTC).SVM的引入可以實現對電機磁鏈和轉矩更精確的控制,從而可以有效抑制永磁同步電機直接轉矩控制中的轉矩和磁鏈脈動;引入SVM的另一個好處是開關頻率固定,電流諧波分量小.因此,SVM被廣泛應用于PMSM直接轉矩控制系統中,以改善直接轉矩控制系統的性能.實現SVM-DTC的關鍵之一是獲得所需要的定子參考電壓,國內外學者就此提出了很多方案.文獻[3-5]采用基于轉矩和磁鏈無差的SVM-DTC控制方案,雖然可以同時精確補償定子磁鏈和電磁轉矩偏差,但存在控制計算過于復雜、對電機參數過于依賴、系統魯棒性差等缺陷.文獻[6-8]采用轉矩、磁鏈雙環控制策略,但2個PI調節器的引入使系統結構更加復雜,參數調節也變得困難.文獻[9-11]將非線性系統線性化理論應用于永磁同步電動機控制中,實現了良好的電磁轉矩和磁場的解耦控制,但是精確線性化解耦對電機參數要求較高,且計算復雜.文獻[12-13]采用轉矩角增量控制方法,但是引入PI調節器來獲得轉矩角增量使得參數調節困難,魯棒性變差.文獻[14-15]采用滑膜控制、模糊控制等智能控制方法,但這些方法使得控制結構更加復雜.文獻[16-18]采用新型變換器供電,如矩陣變換器、三電平變換器進行控制,但需要更加復雜的硬件條件和算法,而忽略了DTC結構簡單的特點.因此,有必要研究一種簡單有效的定子參考電壓矢量確定方法,既可以有效減小轉矩和磁鏈脈動,又保留直接轉矩控制的結構簡單和魯棒性強的特點.
本研究提出一種改進SVM-DTC方案,避免了滯環比較器和電壓矢量開關表的使用,僅僅根據電磁轉矩偏差、磁鏈的相位和偏差,來確定參考電壓矢量的幅值和相位.與其他SVMDTC方案相比,不僅保留了采用SVM的優點,又保留了傳統直接轉矩控制結構簡單、魯棒性強的優點.最后,對本方案和傳統直接轉矩控制方法進行了仿真與實驗的對比.結果表明:改進的SVM-DTC方案具有良好的動態性能,且穩態性能得到改善.
1 電壓矢量對電磁轉矩的控制作用分析
假設忽略電動機鐵心的飽和,不計電動機中的渦流和磁滯損耗,轉子無阻尼繞組.在轉子同步坐標系下,永磁同步電機定子電壓方程可以表示為

定子磁鏈方程可表示為

電磁轉矩可用定子電流表示為

式中,ψsd,ψsq為定子磁鏈dq軸分量,Lsd,Lsq為定子dq軸等效電感,isd,isq為定子電流dq軸分量,ψf為轉子磁鏈,Rs為定子繞組電阻,ωr為轉子電角速度,Te為電磁轉矩,np為電機極對數.
電磁轉矩的變化率:

由電壓方程得出dq軸電流的變化率為

將式(5)代入式(4),則電磁轉矩的變化率可以表示為

式中,?T1為給定定子電壓矢量引起的電磁轉矩變化率,

?T2為由旋轉電動勢引起電流變化,進而引起的電磁轉矩變化率,

?T3為由繞組壓降引起的電磁轉矩變化率,

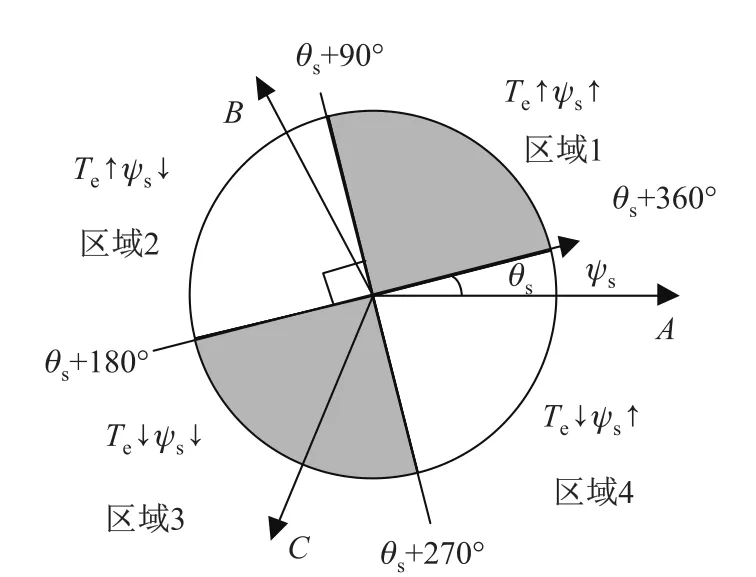
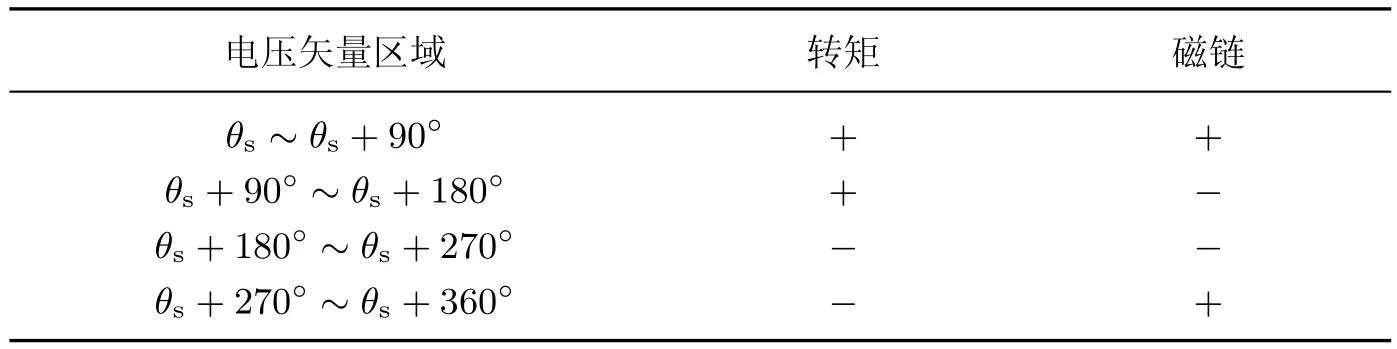
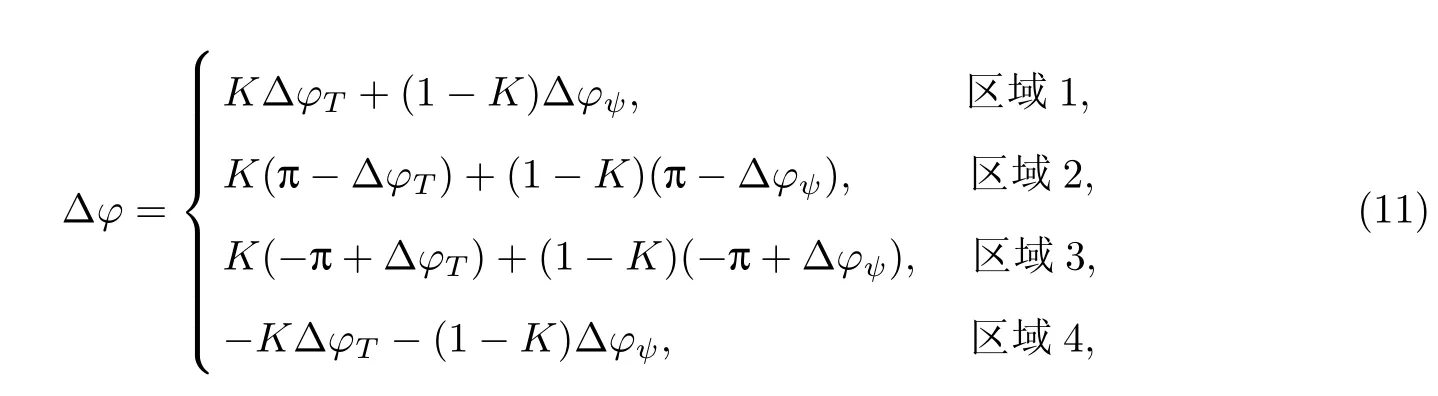
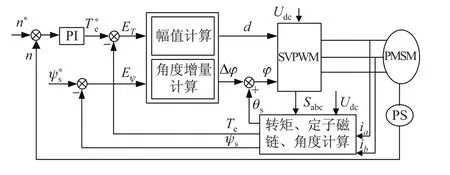
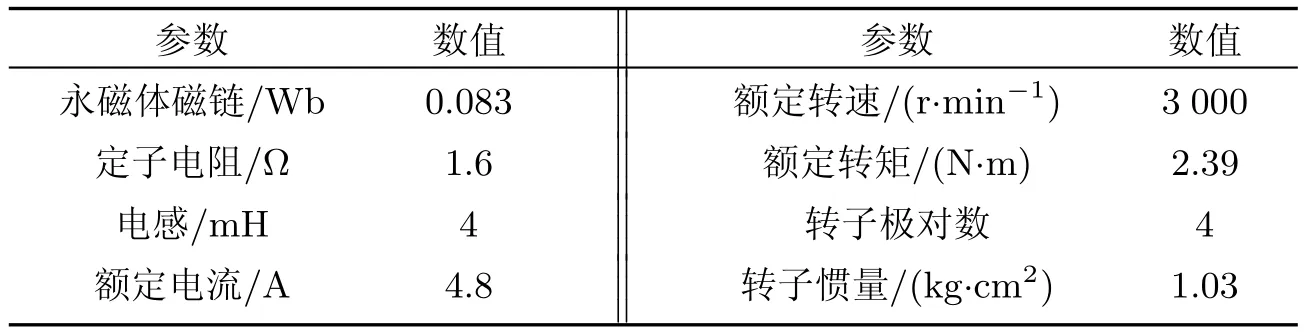
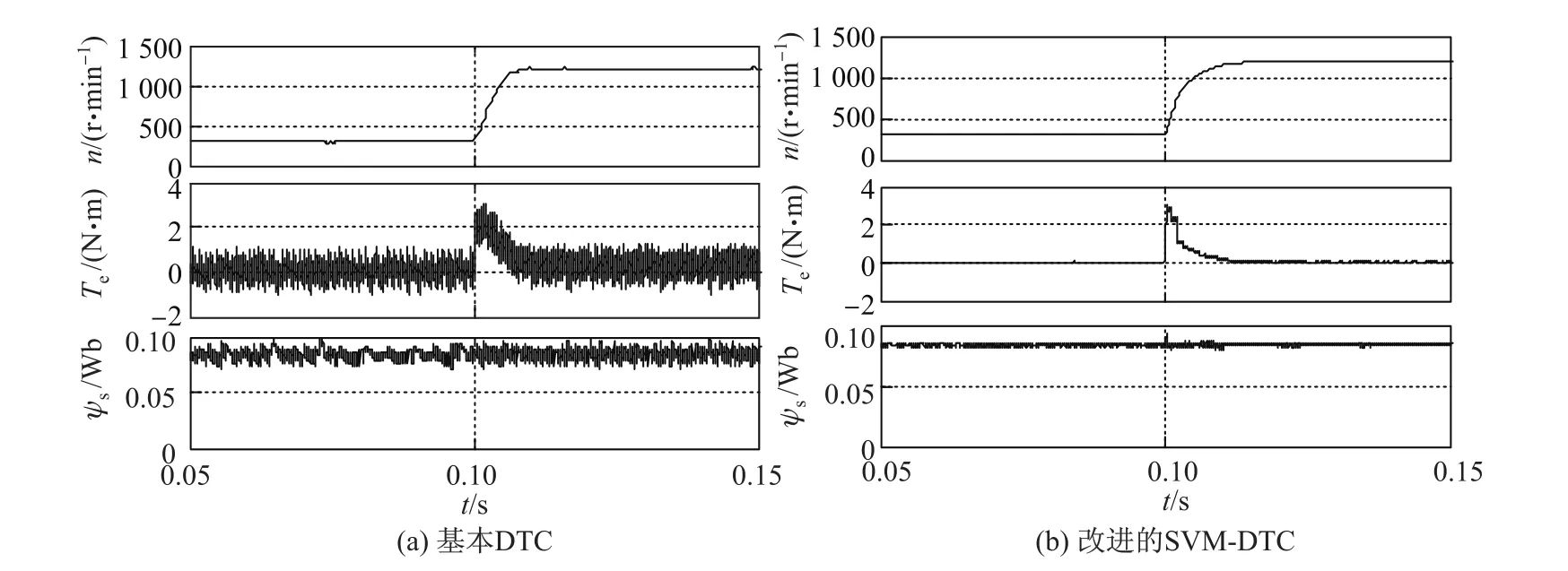
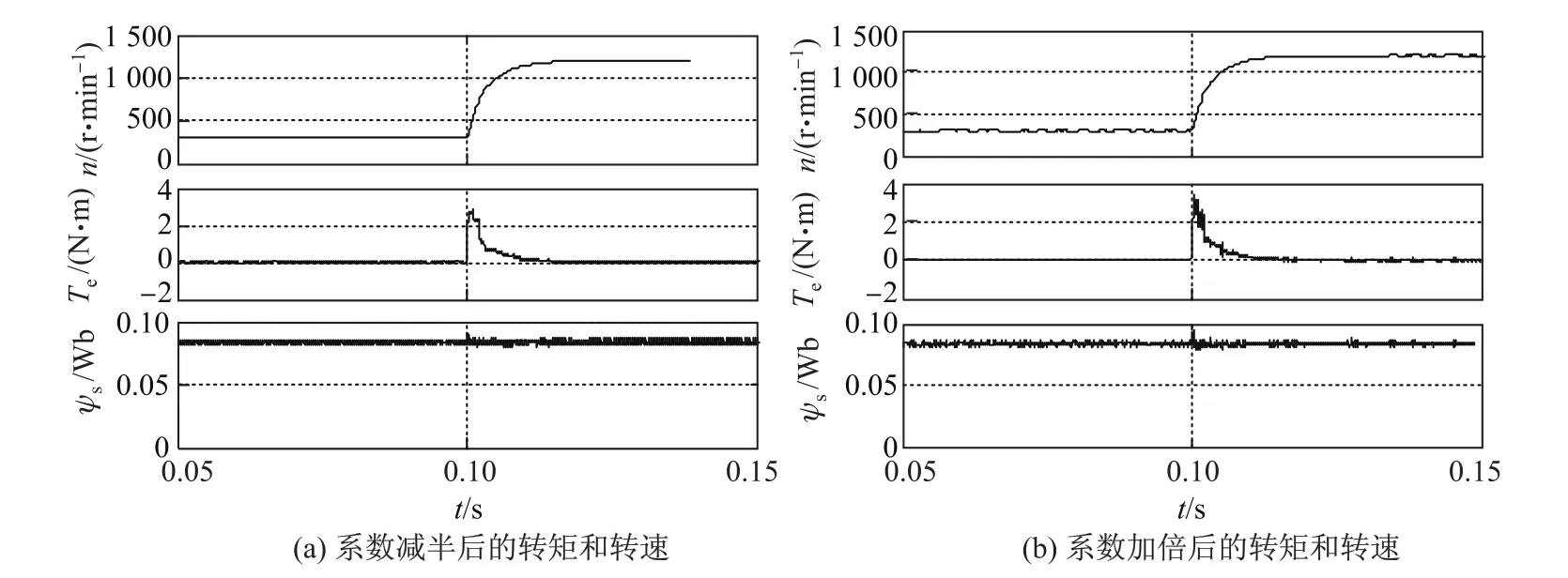
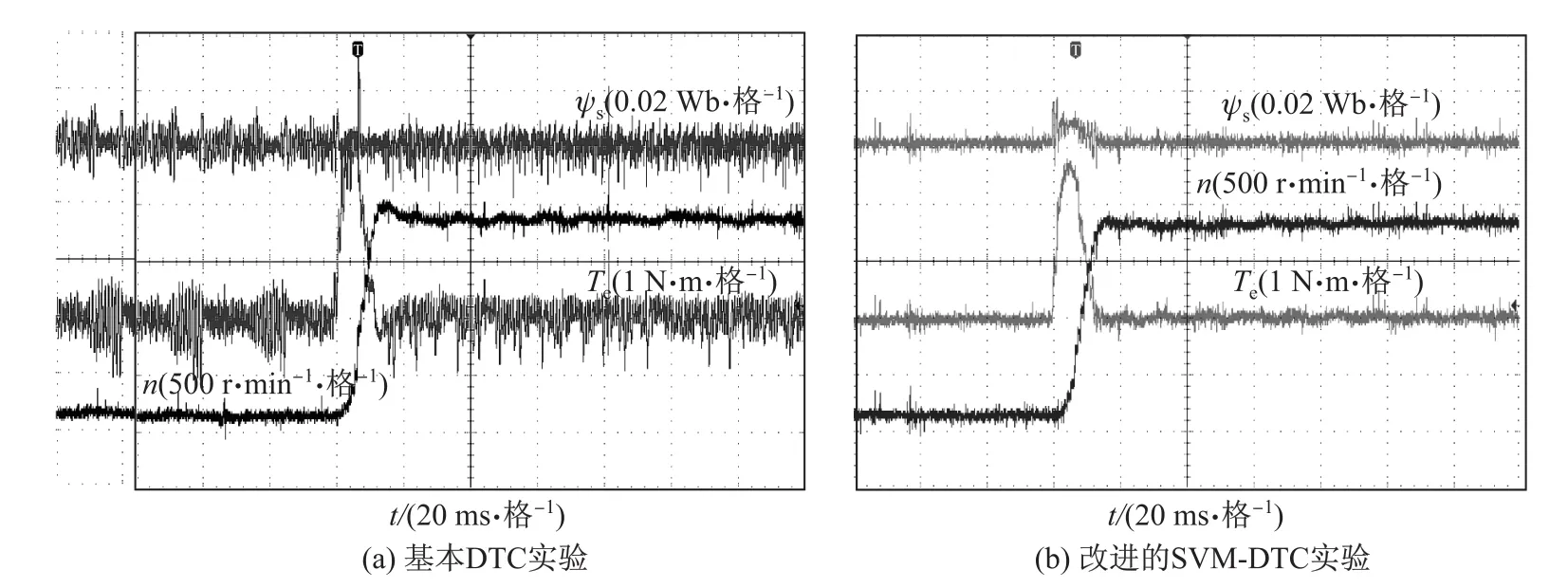
在凸極式同步電機直接轉矩控制中,一般采用最大轉矩/電流比控制方法來確定定子磁鏈給定值,有isd<0,isq>0.在d軸的旋轉電動勢中永磁體產生的旋轉電動勢占主導地位,因此ωr(Lsdisd+ψf)>0.同時,在凸極式同步電機中有Lsd 分析不同轉速范圍內電磁轉矩的變化率可以看出: (1)?T1取決于電壓矢量dq軸電壓分量的大小,當控制周期一定時,改變電壓矢量長度可改變電磁轉矩變化量. (2)當電機在中高速運行并施加零電壓矢量時,?T1為0,旋轉電動勢正比于電機轉速,因此?T2對電磁轉矩變化影響較大,?T3影響較小可以忽略.因此,電磁轉矩明顯減小,且電機速度越高,下降越快.為了使電磁轉矩增大,dq軸電壓分量需大于零,并且由于?T2的影響,電磁轉矩上升率不會太大. (3)當電機低速運行時,?T2較小,而?T3與負載情況有關,總體也不大.此時僅根據定子磁鏈所在扇區、電磁轉矩控制器輸出、定子磁鏈控制器輸出選擇長度一定的電壓空間矢量,可能引起電磁轉矩變化過快.而數字控制系統存在控制死區,因此低速時傳統直接轉矩控制系統轉矩脈動大.綜合以上分析可知,有限的電壓矢量是基本DTC存在轉矩和磁鏈脈動大的根本原因. 當電機為隱極式同步電機時,則有Lsd=Lsq,式(3)~(6)將簡化,上述結論仍然成立,因此本研究的仿真和實驗中均使用隱極式同步電機. 采用SVM可以得到任意的電壓矢量,因此采用SVM來獲得用于控制的電壓矢量,可以有效減小轉矩脈動,改善系統性能.但關鍵是如何確定參考電壓矢量的幅值和角度既可以減小轉矩和磁鏈脈動,又不需要經過精確計算,從而保留直接轉矩控制系統魯棒性強的優點. 本研究提出一種改進的SVM-DTC方案,只需根據電磁轉矩和定子磁鏈的偏差大小,以及定子磁鏈角度來分別估算參考定子電壓矢量的角度和幅值,具體實現原理分析如下. 2.1 參考定子電壓矢量幅值的確定 電壓矢量的幅值應該根據轉矩和磁鏈的偏差來決定.為避免復雜的電壓矢量幅值計算,保持控制系統魯棒性,利用下式計算電壓矢量幅值系數: 式中,ET,Eψ分別為電磁轉矩和定子磁鏈偏差,T?,ψ?分別為給定電磁轉矩和定子磁鏈值, Te,ψs分別為估算電磁轉矩和定子磁鏈值,KT,Kψ為正系數.最后得到參考定子電壓幅值: 式中,Udc為直流母線電壓. 當轉矩和磁鏈偏差增大時,d增大,即生成的等效電壓矢量幅值增大,這樣可迅速減小電磁轉矩和定子磁鏈的偏差;當轉矩和磁鏈偏差減小時,d減小,即生成等效電壓矢量幅值減小,則電磁轉矩和定子磁鏈有微小變化,從而減小轉矩和磁鏈脈動. 2.2 參考定子電壓矢量角度的確定 為了獲得更好的電機調速性能,電壓矢量角度應該根據轉矩和磁鏈偏差以及定子磁鏈的當前位置來決定. 如圖1所示,根據當前定子磁鏈所在角度θs和轉矩、磁鏈偏差符號,可確定4個電壓矢量區域:(θs~θs+90?),(θs+90?~θs+180?),(θs+180?~θs+270?)和(θs+270?~θs+360?). 4個區域對應轉矩和磁鏈的關系如表1所示,“+”表示增大,“?”表示減小. 圖1 改進的電壓矢量區域示意圖Fig.1 Schematic diagram of improved voltage vector areas 表1 電壓矢量區域和轉矩、磁鏈的關系Table 1 Relationship between voltage area,torque and flux 以區域1為例,假設定子磁鏈角度θs已知,轉矩和磁鏈都增大,則選擇區域1內的電壓矢量.并且當轉矩偏差很大(或很小)時,應選擇區域1內靠近θs+90?(或θs+0?)位置的電壓矢量;而當磁鏈偏差很大(或很小)時,應選擇區域1內靠近θs+0?(或θs+90?)位置的電壓矢量.也就是說,轉矩偏差越大,電壓矢量的角度增量越大,而定子磁鏈偏差越大,電壓矢量的角度增量越小.為了減小電磁轉矩偏差,電壓矢量的角度增量 定子電壓矢量的角度增量與定子磁鏈的偏差成反比,為了減小定子磁鏈偏差,電壓矢量的角度增量 通過對式(9)和(10)的分析,得到如下簡易的由定子磁鏈和轉矩偏差來計算參考定子電壓矢量最終角度增量的表達式: 式中,K為權重值,一般偏重轉矩脈動,故選擇K>0.5,φ為參考電壓角度.最終得到參考定子電壓矢量的角度 改進的永磁同步電機SVM-DTC系統結構如圖2所示,系統獲得直流母線電壓、兩相電流以及開關狀態,通過轉矩、定子磁鏈估算模塊得到電磁轉矩值和定子磁鏈值,以及定子磁鏈角度;將估算得到的轉矩和磁鏈分別與給定轉矩和磁鏈比較后,得到轉矩偏差值和磁鏈偏差值;通過幅值和角度增量計算得到電壓矢量幅值和角度增量;通過角度增量和定子磁鏈角的運算,得到電壓矢量角,從而得到輸出參考電壓矢量;最終經過電壓空間矢量調制模塊輸出控制電機. 圖2 改進的SVM-DTC系統Fig.2 Improved SVM-DTC system 由圖2可以看出,通過本方案獲取參考電壓矢量僅需轉矩和磁鏈的偏差,而不需要其他電機參數,避免了復雜計算和對電機參數的依賴性,系統魯棒性強,控制結構簡單. 為了驗證本研究提出的控制方案的正確性,針對永磁同步電機分別進行了仿真和實驗驗證.仿真和實驗中所用電機參數如表2所示. 表2 電機參數Table 2 Motor parameters 3.1 仿真研究 仿真和實驗驗證中,取權重值K=0.6,系數KT=1,Kψ=30.圖3為電機空載運行在0.1 s時,從300 r/min突變至1 200 r/min的情況下,改進的SVM-DTC和基本DTC得到的轉速、電磁轉矩和定子磁鏈波形. 圖3 PMSM轉速、電磁轉矩、定子磁鏈仿真結果Fig.3 PMSM simulation results of speed,torque and flux 由圖3可以看出,改進的SVM-DTC與基本DTC相比雖然動態性能稍差,但轉矩和磁鏈脈動得到大幅降低.基本DTC的轉矩在±1 N·m范圍內脈動,磁鏈在±0.02 Wb范圍內脈動,而改進的SVM-DTC轉矩脈動僅為±0.1 N·m,磁鏈脈動僅為±0.002 Wb. 圖4(a)為KT=0.5,Kψ=15條件下改進的SVM-DTC的轉速和輸出轉矩,圖4(b)為KT=2,Kψ=60條件下的轉速和輸出轉矩.可以看出,當系數KT,Kψ在一定范圍內變化時,系統仍能穩定運行,但對系統的穩態和動態響應均有一定影響.KT,Kψ越小,系統的穩態性能越好,但動態響應變慢;反之,則系統的動態響應快速,但穩態性能變差.這是因為系數越大,在同樣偏差下生成的電壓矢量幅值就越大,角增量也越大,對轉矩和磁鏈的控制作用越明顯,使得動態性能越好,穩態性能變差. 3.2 實驗研究 圖5為永磁同步電機基本DTC和改進的SVM-DTC系統在空載下,轉速從300 r/min突變至1 200 r/min時的電磁轉矩和轉速.可以看出,改進的SVM-DTC方案仍然具有良好的動態響應特性,同時穩態性能得到明顯改善. 圖4 不同KT,Kψ系數下改進SVM-DTC系統仿真結果Fig.4 Simulation results of improved SVM-DTC with different KT,Kψ 圖5 PMSM轉速、電磁轉矩、定子磁鏈實驗結果Fig.5 PMSM experimental results of speed,torque and flux 本研究針對基于SVM的直接轉矩控制提出一種新的參考電壓矢量給定方案,僅需利用轉矩偏差和磁鏈偏差計算參考電壓矢量,簡單易行,魯棒性強.仿真和實驗結果表明,改進的基于SVM的永磁同步電機直接轉矩控制系統在保留了傳統直接轉矩控制結構簡單、魯棒性強、動態性能優良等優點的基礎上,有效減小了轉矩和磁鏈脈動,改善了系統性能. [1]唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,2006:244-263. [2]阮毅,陳伯時.電力拖動自動控制系統-運動控制系統[M].北京:機械工業出版社,2009:192-199. [3]廖永衡,馮曉云,王珍.無差拍空間矢量調制直接轉矩控制簡化設計[J].電工技術學報,2011,26(6): 95-100. [4]王斌,王躍,王兆安.空間矢量調制的永磁同步電機直接轉矩控制[J].電機與控制學報,2010,14(6): 45-50. [5]孫丹,賀益康.基于恒定開關頻率空間矢量調制的永磁同步電機直接轉矩控制[J].中國電機工程學報,2005,25(12):112-116. [6]張華強,王新生,魏鵬飛,等.基于空間矢量調制的直接轉矩控制算法研究[J].電機與控制學報, 2012,16(6):13-18. [7]Gilbert F,Rahman M F.A novel speed sensorless direct torque and flux controlled interior permanent magnet synchronous motor drive[C]//Power Electronics Specialists Conference.2008: 50-56. [8]何師,邱阿瑞,袁新枚.基于SVM的永磁同步電機直接轉矩控制實驗研究[J].微電機,2008,41(4): 6-8. [9]周揚忠,許海軍,毛潔.永磁同步發電系統中轉矩和磁鏈精確線性化解耦控制[J].中國電機工程學報,2012,32(24):96-102. [10]劉賢興,卜言柱,胡育文,等.基于精確線性化解耦的永磁同步電機空間矢量調制系統[J].中國電機工程學報,2007,27(30):55-59. [11]劉賢興,胡育文,卜言柱.基于滑模變結構的永磁同步電機精確線性化控制[J].航空學報,2008, 29(5):1269-1273. [12]邱鑫,黃文新,楊建飛,等.一種基于轉矩角的永磁同步電機直接轉矩控制[J].中國電機工程學報, 2013,28(3):56-62. [13]王宇,鄧智泉,王曉琳.基于空間矢量調制的電勵磁通切換電機轉矩角增量控制策略[J].中國電機工程學報,2012,32(3):75-82. [14]Chen L,Fang K L,Hu Z F.A scheme of fuzzy direct torque control for induction machine[C]//Proceedings of the Fourth International Conference on Machine Learning and Cybernetics.2005:803-807. [15]Babu P S,Ushakumari S.Modified direct torque control of induction motor drives[C]//Recent Advances in Intelligent Computational Systems.2011:937-940. [16]Guo Y,Chang X B,Chen C L.DTC-SVM-based matrix converter for a PMSM in a vessel electric propulsion system[C]//Control and Decision Conference.2009:3397-3401. [17]Cui H B,Chen C Y,Jiang W,et al.Direct torque control method of induction machines using three-level space vector modulation[C]//Power Electronics and Motion Control Conference. 2009:585-588. [18]宋文勝,馮曉云,侯黎明,等.電力牽引傳動系統的三電平直接轉矩控制算法的半實物實驗研究[J].電工技術學報,2012,27(2):165-172. Direct torque control of permanent magnet synchronous motor based on space vector modulation control YANG Ying,HAN Bing,CHEN Xin,TU Xiao-wei To obtain the reference voltage vector is a key to the direct torque control (DTC)of permanent magnet synchronous motor(PMSM)based on the space vector modulation(SVM).From the control effect of the voltage vector on electromagnetic torque,the analysis shows that the limited number of voltage vectors is a primary cause of large ripple in the torque and flux of a DTC system.A robust DTC method of PMSM based on SVM is proposed.Amplitude and phase angle of the reference voltage vector is calculated according to the flux phase position,errors in the torque and flux,which is insensitive to motor parameters.Simulation and experimental results show that the improved DTC method based on SVM with a simple structure has strong robustness and can greatly improve the DTC performance. permanent magnet synchronous motor(PMSM);direct torque control(DTC); space vector modulation(SVM);torque ripple TM 343 A 1007-2861(2015)05-0598-08 10.3969/j.issn.1007-2861.2014.04.004 2014-04-28 楊影(1979—),女,副教授,博士,研究方向為高性能伺服控制系統.E-mail:yangying_h@163.com2 基于空間矢量調制的永磁同步電機直接轉矩控制





3 仿真和實驗研究
4 結束語
(School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200072,China)
