基于輸入限制的I-ELM機車熱軸等級判別模型
2015-08-01 05:06:44宋平崗林家通康水華楊云
軸承 2015年7期
關鍵詞:模型
宋平崗,林家通,康水華,楊云
(華東交通大學 電氣與電子工程學院,南昌 330013)
滾動軸承是機車走行部的關鍵零件,其狀況直接影響機車的性能與安全[1]。高速運行中,如果軸承發生故障甚至卡死,會產生熱軸現象,不能及時處理將造成切軸甚至顛覆事故[2]。據統計,80%以上的火車翻車事故由熱軸造成。
目前,廣泛采用紅外線軸溫探測系統(Trace Hotbox Detection System, THDS)監控熱軸現象,但其實際應用中預報兌現率普遍較低,誤報率較高[3-5]。由于熱軸判別的復雜性,目前THDS設備根據歷史經驗設定熱軸判別閾值,無法直接滿足實際應用要求。為提高溫度判別準確率,文獻[6]提出使用模型算法對軸溫建立識別模型,實現對軸承溫度的模糊判別,但其存在隸屬度函數設計困難,參數設計主觀性強等不足。文獻[7]提出了基于模糊神經網絡的熱軸判別模型,準確率較高,但存在神經訓練層及隱含神經元多,計算速度慢等缺陷。
針對上述問題,引入增量型極限學習機(Incremental Extreme Learning Machine, I-ELM)算法,該算法具有學習速度快、參數少、精度高等優勢[8-10]。I-ELM算法隨機產生輸入層與隱含層間的連接權值及隱含層神經元的閾值,且在訓練過程中無需調整,只需設置隱含層神經元的個數便可獲得唯一的最優解,通過不斷增加隱含層神經元個數減小訓練誤差,提高網絡精度。針對機車軸溫的非線性復雜多變特性,提出帶輸入限制的極限學習機,對熱軸級別進行判別,并將其應用于和諧型機車軸承溫度監測報警裝置中。
1 機車熱軸判別模型
1.1 背景分析
軸承內部的摩擦是其主要熱源。從生熱的角度考慮,整體生熱法和局部生熱法以實驗室測量結果為基礎,總結出的經驗公式并不能完全適用于機車軸承復雜溫度場情況。熱網絡法和有限元法采用理論分析,事先假設了某些特定條件,結論形式復雜且計算量大,無法滿足機車軸溫故障快速報警的要求[11]。
機車軸承運行溫度的影響因素多而復雜,且相互交叉關聯。THDS設備在實際中判別效果并不理想,主要因為機車運行在不同區間時,溫度、氣候等環境因素存在較大變化,且車型、車種,軸承結構、運行速度、負載情況等內在因素差異都直接影響機車軸承的運行溫度。這些復雜且密切關聯的因素決定了機車軸承溫度模型的復雜性。
目前,THDS設備生產廠家常根據歷史經驗設定熱軸判別的閾值。由于機車的運行環境及自身運行情況存在變化,固定的閾值無法適應實際應用需求。因此,熱軸級別判斷沒有固定的公式與模型,可以視作其中內在關聯因素發生作用,直接體現在軸承溫度上。在此,分析軸承溫度與其熱軸級別,并采用神經網絡訓練的中間隱含層表述其內在關系。
1.2 機車熱軸判別模型
極限學習機(Extreme Learning Machine,ELM)是典型的單隱含層前饋神經網絡結構,由輸入層、隱含層和輸出層組成,輸入層與隱含層、隱含層與輸出層神經元之間全連接。
熱軸判別受諸多因素影響,一般不直接使用軸溫作為熱軸判別指標,而是使用軸溫溫升[5-7]。軸溫溫升是指軸溫與環境溫度之差,選取溫升T1、列溫升T2、輛溫升T3作為模型的輸入,其具體含義見表1。

表1 模型輸入含義
模型的輸出為熱軸等級G,沿用鐵路系統做法將熱軸等級分為正常、微熱、強熱、激熱共4級,分別用1,2,3,4表示輸出。則ELM神經網絡結構如圖1所示。

圖1 ELM神經網絡結構
設隱含層神經元為n,則輸入層與隱含層之間的連接權值w為
(1)
式中:wji為輸出第i個神經元與隱含層第j個神經元間的連接權值,j=1,2,…,n;i=1,2,3。
隱含層與輸出層間的連接權值β為
β=[β1,β2,…,βn]T,
(2)
式中:βj為第j個神經元與輸出神經元的連接權值。
隱含層神經元的閾值b為
b=[b1,b2,…,bn]T。
(3)
設隱含層激活函數為g(x),則具有Q個訓練樣本的神經網絡輸出G可以表示為

(4)
其中wi=[w11,w12,w13],(4)式可以進一步表示為
Hβ=GT,
(5)
H(w1,w2,…,wn,b1,b2,…,bn,T1,T2,…,TQ)=

(6)
若給定滿足某些條件的激活函數,如sigmoid,sine,hardlim和RBF函數,則神經網絡的輸出可以任意精度逼近目標函數[12-13]。因此,在極限學習機算法中,連接權值w和閾值b在訓練中隨機選擇且在訓練中保持不變。而隱含層與輸出層間的連接權值β可以通過求解以下方程組的最小二乘解獲得
(7)
其解為
(8)
式中:H+為隱含層輸出矩陣H的Moore-penrose廣義逆矩陣。
1.3 隱含層神經元數目確定
隱含層神經元數目太少或太多對神經網絡的性能都有影響,而隨著隱含層神經元數目的增加,增量型極限學習機的輸出誤差趨勢逐漸減小并趨近零[14],即第k+1次迭代所獲取的網絡輸出誤差小于第k次迭代,不會出現過擬合問題。
因此,選取隱含層神經網絡具體做法是:首先給定隱含層神經元初值n,訓練誤差η,如果網絡輸出誤差E大于訓練誤差η,則增加隱含層神經元數目,重新訓練網絡,直至E<η。
1.4 基于輸入限制的I-ELM熱軸等級判別模型
根據電力機車軸溫的特性,通常THDS設備在軸承溫升達到40 ℃時預報微熱,溫升超過70 ℃時預報激熱[6]。但是簡單的“一刀切”往往會造成判斷錯誤,故采用I-ELM熱軸等級判別模型。在軸承溫升低于30 ℃時,可以不通過ELM算法即可明確判定為正常運轉溫度;同樣,溫度超過100 ℃的強烈發熱的情況下,可以直接判定為激熱。判別表達式為

(9)
通過溫升能夠直接判斷熱軸等級的數據,減小ELM的計算量,從而提高算法的效率。因此,基于輸入限制的I-ELM熱軸等級判別模型實現步驟為:
1)處理數據并獲取Q個訓練樣本,給定訓練誤差η;
2)設隱含層神經元數目初值n=0, 樣本訓練誤差E;
3)設隱含層節點n=n+1;
4)隨機產生輸入層與隱含層之間的連接權值w及隱含層神經元的閾值b;
5)選擇sigmoid函數為激發函數,并根據(6)式計算隱含層輸出矩陣H;
6)根據(8)式計算隱含層與輸出層間的連接權值β;
7)根據(4)式計算神經網絡的輸出G;
8)計算訓練樣本誤差E
(10)
若E<η,則終止訓練,否則跳至第3)步;
9)限制輸入,篩選測試樣本。溫升低于30 ℃時熱軸等級為1,溫升大于100 ℃時熱軸等級為4。篩選后組成新的測試樣本;
10)測試訓練網絡。將新的測試樣本輸入訓練好的網絡,將預測值與測試樣本實際輸出值進行對比,檢驗模型判別能力。
2 仿真分析
仿真試驗基于MATLAB7.8平臺,共選取60個樣本,其中正常、激熱、強熱樣本各10個,微熱樣本30個。為達到較好的訓練網絡,每個熱軸等級的樣本數據按照訓練樣本與測試樣本4∶1的比例選取,即訓練樣本48個,測試樣本12個。首先設定隱含層神經元初值L為30,訓練允許誤差E為4%,進行隱含層神經元個數選取,結果見表2。

表2 不同隱含層神經元個數的誤差
由表2可知,隨著隱含層數目的增加,誤差E有波動,但總體趨勢是誤差越來越小。當L=44時,誤差E=2.08%,符合要求,因此將隱含層神經元數目固定為44。將訓練好的網絡用于測試樣本,預測結果與真實值的對比如圖2所示,分類正確率達91.667%,其中熱軸等級為正常運轉、微熱和激熱分類正確率為100%。由于樣本數較小,神經網絡的訓練精度較差。如果強熱樣本數再多一些,分類正確率還會有所提高。

圖2 ELM模型熱軸等級判別結果
為進一步驗證模型的有效性,采用傳統的BP神經網絡和RBF神經網絡進行分析,結果如圖3和圖4所示。3種模型運行時間和判別準確率的對比結果見表3,ELM的效率及準確率均高于其他2種模型。

圖3 BP模型熱軸等級判別結果
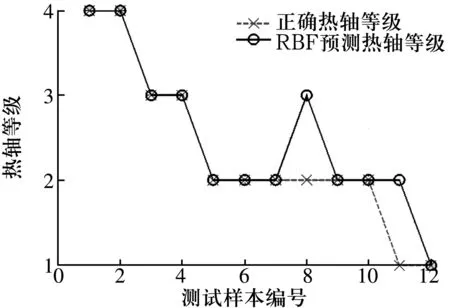
圖4 RBF模型熱軸等級判別結果
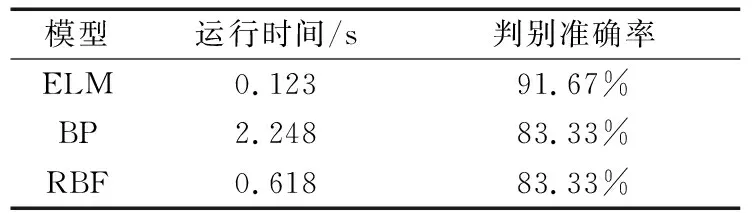
表3 算法運行時間
3 算法應用
根據上述模型,設計了和諧型機車軸承溫度監測報警裝置,其系統結構如圖5所示,由傳感器、接線盒、通信總線、主機和顯示器等組成。系統采用1-wire總線數字溫度傳感器,每個傳感器采用吸附式安裝方式固定到每個溫度測量點[15]。傳感器安裝部位如圖6所示,每個軸位測量電動機大、小端,車軸左、右端,抱軸左、右端等6個軸溫測量點,每個軸位還可接1個環境溫度探頭,即每個主機上布置28個溫度探頭。
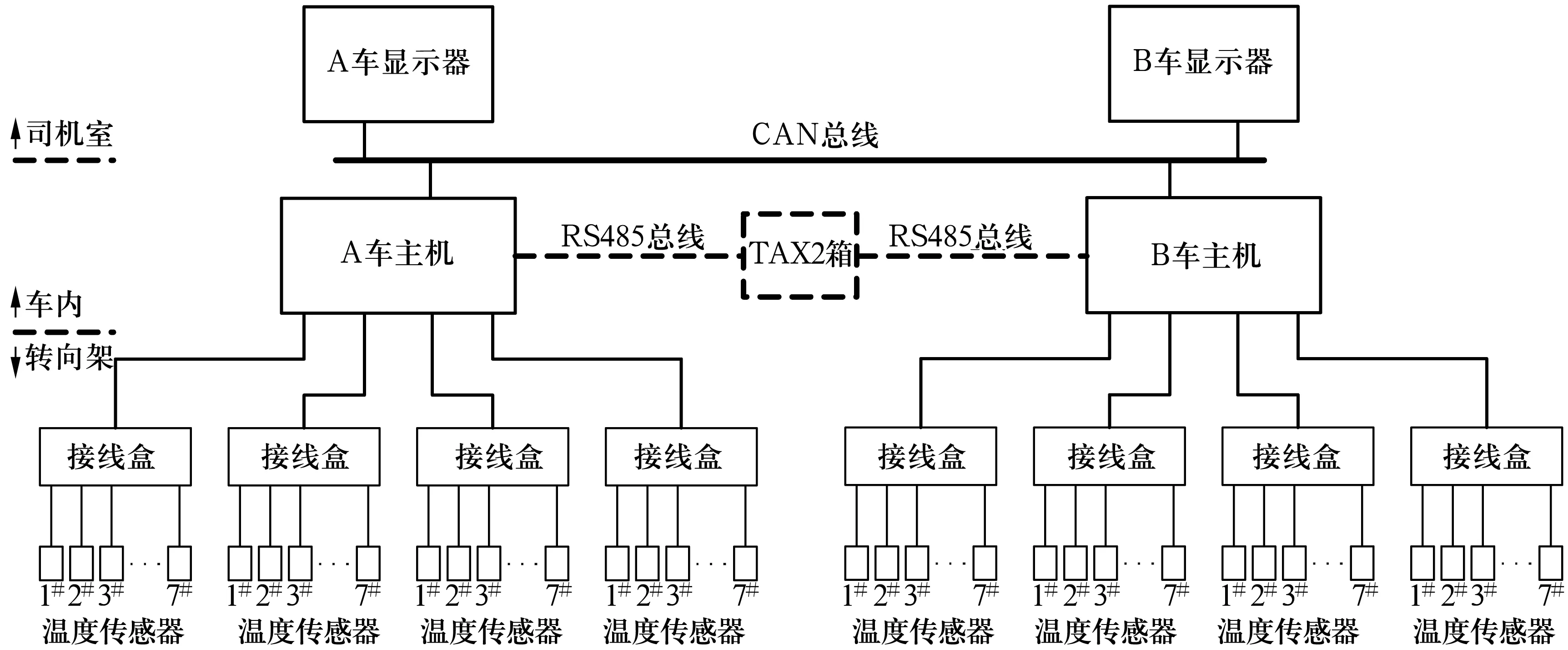
圖5 系統整體結構框圖
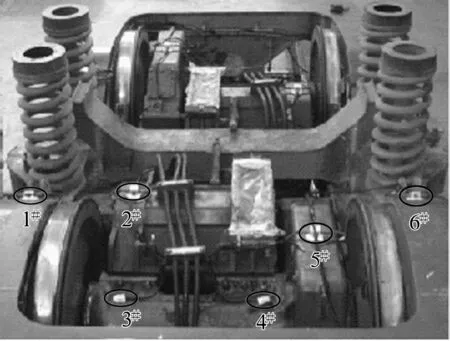
圖6 系統溫度傳感器安裝實物圖
采用Contex-M3處理芯片ARM5749作為主控處理器。主機測量的溫度數據經ARM5749計算處理后在顯示器上顯示,同時通過色塊警示及蜂鳴器報警,溫度顯示與報警效果如圖7所示。

圖7 系統溫度顯示及報警界面
在系統設計中,系統需要完成傳感器溫度值的采集、計算、分析、數據處理、報警等級識別及液晶顯示驅動等。在程序設計中根據經驗選取40個輸入、輸出樣本作為固定的訓練參數,并根據測量診斷結果自動增加或更新20個輸入、輸出結果作為實時變化的訓練參數。具體ELM算法流程如圖8所示。

圖8 系統整體結構框圖
4 結束語
將ELM模型應用于機車熱軸級別判別,并結合熱軸自身特性提出了基于輸入限制I-ELM判別方法。根據設計精度要求選定隱含層神經元數目,針對多數的常規低溫升情況與少量特高溫升故障情況,不輸入ELM網絡而直接判別,極大提高了模型的判別效率。
仿真結果表明,ELM熱軸等級判別模型不僅判別準確性有所提高,而且大大縮短了運行時間。多年實際應用表明,熱軸等級模型判別準確,運行效果良好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19