蛙式打夯機的簡單動力學(xué)分析
2015-08-19 23:41:53陳銳
科技與創(chuàng)新 2015年16期
陳銳
摘 要:隨著社會的發(fā)展和科技的不斷進步,蛙式打夯機在夯實泥土過程中的應(yīng)用越來越廣泛。因此,對蛙式打夯機在運用中的各項數(shù)據(jù)進行了分析,以期為相關(guān)方面的研究提供幫助。
關(guān)鍵詞:蛙式打夯機;動力學(xué)分析;機架;重錘
中圖分類號:TU62 文獻標(biāo)識碼:A DOI:10.15913/j.cnki.kjycx.2015.16.034
蛙式打夯機是利用沖擊和沖擊振動的作用分層夯實泥土的壓實器械。其利用偏心旋轉(zhuǎn)力原理制成,由偏心塊、電動機、機架和皮帶等構(gòu)成。電動機傳動部分在支座上帶動偏心塊,偏心塊依靠離心力的作用,通過傳動軸與機架的鉸接帶動機架運動,使機架繞著此軸進行上、下錘擊擺動。機架前端有重錘,當(dāng)機架向下方擺動時,依靠重力和慣性力落地的一瞬間夯擊泥土,向上方擺動時支座向前移動。因此,蛙式打夯機每捶打一次,就會向前移動一步,猶如青蛙向前跳躍,因此取名為“蛙式打夯機”。
1 打夯機向上跳躍一瞬間分析
設(shè)偏心塊的質(zhì)量為m,打夯機整體的質(zhì)量為M,時間為t,偏心部分相對于打夯機整體形心的偏心距為e. 現(xiàn)假設(shè)打夯機整體形心與質(zhì)心重合,偏心裝置以轉(zhuǎn)速ω勻速轉(zhuǎn)動。
如圖1所示 ,建立固定坐標(biāo)系O—XY和平動坐標(biāo)系O′—X′ Y′,在平動坐標(biāo)系下機架(偏心桿)與X′ 軸夾角為θ∶θ=ωt ,設(shè)傳動軸O′相對于固定坐標(biāo)系的水平位移、速度和加速度分別為x,x′,x″,相對于固定坐標(biāo)系的豎直位移、速度和加速度分別為y,y′,y″,假設(shè)不計地面摩擦力,建立偏心輪的受力方程。
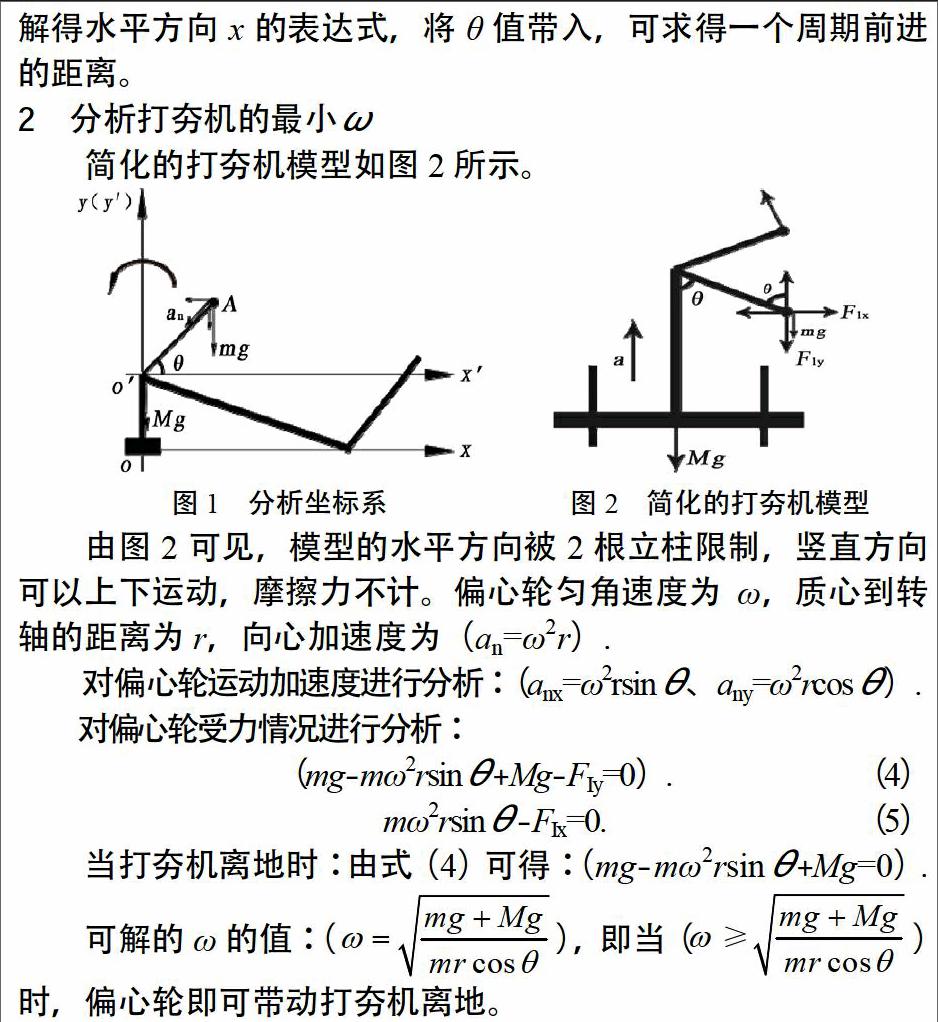
2 分析打夯機的最小ω
3 結(jié)束語
本文分析了蛙式打夯機的運動狀態(tài),并對一些力學(xué)問題進行了分析,但有些問題暫時無法給出合理的解釋。因此,本分析還有進一步研究的空間。
參考文獻
[1]孫桓,陳作模,葛文杰.機械原理[M].北京:高等教育出版社,2013.
[2]哈爾濱工業(yè)大學(xué)理論力學(xué)教研室.理論力學(xué)[M].第七版.北京:高等教育出版社,2014.
[3]李德新.高等數(shù)學(xué)[M].北京:高等教育出版社,2013.
〔編輯:張思楠〕
Abstract: With the continuous progress of society and the development of science and technology, frog rammer in rammed earth has been used more and more widely. Therefore, the ramming machine of the data in the application is analyzed, in order to provide help for the related research.
Key words: ramming machine; dynamic analysis; frame; weight
