寬帶寬測(cè)繪帶SAS非線性線頻調(diào)變標(biāo)算法
2015-08-23 09:35:34田振唐勁松鐘何平張森
哈爾濱工程大學(xué)學(xué)報(bào) 2015年4期
田振,唐勁松,鐘何平,張森
(海軍工程大學(xué)海軍水聲技術(shù)研究所,湖北武漢430033)
合成孔徑聲吶[1-2](synthetic aperture sonar,SAS)是一種新型體制的水下成像聲吶,因其同時(shí)具有較高的距離分辨力和方位分辨力,在軍事、民用以及海洋研究領(lǐng)域得到了重要應(yīng)用。由于高頻聲信號(hào)在水下衰減較快,為提高探測(cè)距離,不可避免地需要采用低頻聲信號(hào)。SAS的工作頻率一般為幾十至幾百千赫茲,要實(shí)現(xiàn)距離向的高分辨成像則需要提高信號(hào)帶寬[3-4]。由于SAS系統(tǒng)的帶寬載頻比不斷降低,現(xiàn)有以窄帶近似為基礎(chǔ)的大多數(shù)成像算法不再適用[5]。另外,提高測(cè)繪帶寬以提高測(cè)繪速率也是目前SAS成像算法亟需解決的問題之一。因此,設(shè)計(jì)實(shí)現(xiàn)能夠滿足寬帶寬測(cè)繪帶成像需求的SAS成像算法具有十分重要的意義。
線頻調(diào)變標(biāo)(chirp-scaling,CS)算法[6]不需要耗時(shí)的插值運(yùn)算且具有相位保真度高的優(yōu)點(diǎn),一直被廣泛應(yīng)用于各種場(chǎng)景的 SAS/SAR成像[7-12]。為此,Nieves[13]和 Potsis[14]分析了 CS 算法應(yīng)用于寬帶 SAS成像的可行性。文獻(xiàn)[15]認(rèn)為可以通過適當(dāng)改進(jìn)非線性CS(nonlinear CS,NCS)算法實(shí)現(xiàn)超寬帶SAR成像。文獻(xiàn)[16]指出適用于大斜視SAR成像的NCS算法往往也適用于具有大帶寬發(fā)射信號(hào)的SAS成像,并提出了一種適用于寬帶SAS成像的改進(jìn)NCS算法。由于該算法在推導(dǎo)由三次和四次相位濾波及NCS操作引入的相關(guān)變量時(shí),沒有考慮距離頻率高階項(xiàng)中等效調(diào)頻斜率隨時(shí)延差量的二階變化特性,導(dǎo)致測(cè)繪帶邊緣模糊,降低了有效測(cè)繪帶寬。
針對(duì)這個(gè)問題,本文在文獻(xiàn)[16]中改進(jìn)的NCS算法的基礎(chǔ)上,繼續(xù)對(duì)算法進(jìn)行改進(jìn),特別是在推導(dǎo)由三次和四次相位濾波及NCS操作引入的相關(guān)變量時(shí),充分考慮距離頻率高階項(xiàng)中等效調(diào)頻斜率隨時(shí)延差量的二階變化特性,有效解決了改進(jìn)的NCS算法中測(cè)繪帶邊緣點(diǎn)的散焦問題,大大增加了有效測(cè)繪帶寬。本文最后進(jìn)行了仿真分析,并與傳統(tǒng)的NCS算法和改進(jìn)的NCS算法的成像結(jié)果進(jìn)行了對(duì)比。
1 信號(hào)模型
在SAS系統(tǒng)中,目標(biāo)的回波是在距離向和方位向擴(kuò)散開來(lái)的,可以將SAS回波信號(hào)的接收看作從目標(biāo)空間到信號(hào)空間的映射,而成像過程則是從信號(hào)空間到圖像空間的映射。假定SAS發(fā)射和接收信號(hào)的過程中,滿足停走停近似。SAS通常發(fā)射線性調(diào)頻信號(hào),為方便計(jì)算,本文取成像區(qū)域內(nèi)固定點(diǎn)目標(biāo) (r,0)進(jìn)行分析。在t時(shí)刻,假定聲基陣坐標(biāo)為 (0,vt),v表示SAS平臺(tái)航速。此時(shí),點(diǎn)目標(biāo)響應(yīng)的斜距歷程可以表示為經(jīng)過調(diào)制解調(diào),點(diǎn)目標(biāo)回波響應(yīng)可以表示為

式中:A0為常數(shù),ωr(·)由發(fā)射信號(hào)復(fù)包絡(luò)形狀決定,ωa(·)由聲基陣的指向性函數(shù)決定,τ為距離向快變時(shí)間,μ為信號(hào)的調(diào)頻斜率,f0為信號(hào)載頻,c為水下聲速。
2 擴(kuò)展的NCS算法推導(dǎo)
NCS算法通常在二維頻域或者距離多普勒域進(jìn)行,忽略幅值對(duì)成像的影響,將R(t;r)的表達(dá)式代入式(1),并通過二維傅立葉變換(Fourier transform,F(xiàn)T)將信號(hào)轉(zhuǎn)換到二維頻域,可得點(diǎn)目標(biāo)響應(yīng)二維譜為
式中:Wr(·)表示距離向的信號(hào)包絡(luò),Wa(·)表示方位向的信號(hào)包絡(luò),fr表示距離向瞬時(shí)頻率,fa表示方位向瞬時(shí)頻率。不妨令

對(duì)fr進(jìn)行泰勒級(jí)數(shù)展開,可得

其中前四階系數(shù)項(xiàng)為
2.1 二維譜高階項(xiàng)補(bǔ)償
分析式(3)可以發(fā)現(xiàn),寬帶成像和窄帶成像的區(qū)別在于式(4)泰勒級(jí)數(shù)展開時(shí)保留的階數(shù)。窄帶成像時(shí),fr?f0成立,忽略高階項(xiàng)是允許的;寬帶成像時(shí),fr?f0不再成立,高階項(xiàng)帶來(lái)的相位誤差較大,因而不能忽略。對(duì)于寬帶成像,可以通過與一個(gè)參考距離rref處的相位因子相乘近似補(bǔ)償高階項(xiàng)引入的相位誤差,該相位因子表達(dá)式為
2.2 三次和四次相位濾波
傳統(tǒng)的 NCS 算法[8]在對(duì) φ(fr,fa;r)進(jìn)行泰勒級(jí)數(shù)展開時(shí)僅考慮fr的三階項(xiàng),由于本文考慮fr的四階項(xiàng),故需要引入三次和四次相位濾波函數(shù):

式中:Y(fa)和Zm(fa)為待求量。三次和四次相位濾波之后,點(diǎn)目標(biāo)響應(yīng)二維譜相位變化為

這里近似認(rèn)為在成像區(qū)域內(nèi)φ4(fa;r)是距離空不變的,并用φ4(fa;rref)替代。注意,傳統(tǒng)NCS算法并沒有考慮四階項(xiàng),且認(rèn)為φ3(fa;r)是距離空不變的,而本文則充分考慮φ3(fa;r)的距離空變性。此時(shí),將回波響應(yīng)通過距離向逆FT(inverse FT,IFT)回到距離多普勒域,其距離多普勒譜相位為

式中:τ0=2r/c表示不同距離處的時(shí)延,ks(fa;τ0)=1/[ μ-1-ksrc]表示信號(hào)的等效調(diào)頻斜率,A(fa)=
2.3 NCS操作
與傳統(tǒng)的NCS算法不同,改進(jìn)的NCS算法考慮了等效調(diào)頻斜率隨時(shí)延差量的一階線性變化和二階非線性變化特性,即

其中,Δk1(fa;τref)和 Δk2(fa;τref)為ks(fa;τ0)在參考距離處隨時(shí)延差量的一階和二階變化率,其表達(dá)式由ks(fa;τ0)的泰勒展開系數(shù)確定,即

式中:Δksrc(fa)=(D-3-D-1)/f0,τref=2rref/c表示參考距離處的時(shí)延。
NCS操作在距離多普勒域進(jìn)行,主要校正不同距離處的距離徙動(dòng)差量,使不同距離處的信號(hào)具有一致的距離徙動(dòng)量,操作函數(shù)為

式中:q2、q3和q4分別是q2(fa;τref)、q3(fa;τref)和q4(fa;τref)的簡(jiǎn)寫形式,為待求參量。將回波信號(hào)與式(12)相乘完成NCS操作,然后通過距離向FT將回波響應(yīng)變換到二維頻域,可得


注意,這里在進(jìn)行距離向FT時(shí),仍然假設(shè)駐定相位點(diǎn)與τ的三次以上項(xiàng)無(wú)關(guān)。為簡(jiǎn)化公式,不妨將Y(fa)、和Δksrc(fa)簡(jiǎn)寫為Y、Z、Δτ、ks、ksr、A和 Δksrc。考慮到Aτ0=AΔτ+Aτref,經(jīng)過整理,式(14)中各相位項(xiàng)可以分別表示為

式(15)為方位壓縮項(xiàng)以及三次和四次相位濾波及NCS操作引入的剩余相位項(xiàng),該項(xiàng)可以在方位向IFT前通過相位相乘予以補(bǔ)償。
式(16)對(duì)應(yīng)于點(diǎn)目標(biāo)距離向坐標(biāo)和距離向走動(dòng)項(xiàng),因此需要保留關(guān)于Δτ的常數(shù)項(xiàng)和一次項(xiàng)。將式(9)代入式(16)并展開成Δτ的函數(shù),且保留至Δτ的三階項(xiàng)。令展開式中Δτ的二次項(xiàng)及三次項(xiàng)系數(shù)為0,這樣就消除了距離向走動(dòng)的空變現(xiàn)象。需要注意的是,這里充分考慮式(9)中Δτ的二階項(xiàng),而文獻(xiàn)[16]僅部分考慮了Δτ的二階項(xiàng),這會(huì)導(dǎo)致一定的誤差。

式(17)對(duì)應(yīng)于二次距離壓縮項(xiàng),僅需保留常數(shù)項(xiàng)即可。將式(9)代入式(17)并展開成Δτ的函數(shù),僅保留至Δτ的二階。令展開式中Δτ的一次項(xiàng)及二次項(xiàng)系數(shù)為0,這樣就消除了二次距離壓縮的線性和二階非線性變化項(xiàng)。同樣的,文獻(xiàn)[16]仍部分考慮了Δτ的二階項(xiàng),從而引起一定的誤差。
式(18)對(duì)應(yīng)于fr的三階耦合項(xiàng),因此保留常數(shù)項(xiàng)即可。將式(9)代入式(18)并展開成Δτ的函數(shù),僅保留至Δτ的一階。因此,令展開式中Δτ的一次項(xiàng)系數(shù)為0即可消除三階耦合量的空變特性。

式(19)為四次相位濾波及NCS操作引入的剩余相位項(xiàng)。這里近似認(rèn)為φ4(fa;τ0)是距離空不變的,即φ4(fa;τ0)≈φ4(fa;τref)。該項(xiàng)通常在二維頻域通過相位相乘進(jìn)行補(bǔ)償。聯(lián)立式(16)~(18)可以解得待定系數(shù)q2、q3、q4、Y、Z的表達(dá)式分別為
2.4 距離壓縮、SRC與RCMC
NCS操作后,點(diǎn)目標(biāo)響應(yīng)二維譜相位變化為
NCS算法一般在二維頻域通過相位相乘完成距離壓縮、二次距離壓縮(secondary range compression,SRC)與距離徙動(dòng)校正(range cell migration correction,RCMC)處理,其參考因子為

2.5 方位壓縮、方位走動(dòng)校正與剩余相位補(bǔ)償
方位壓縮、方位走動(dòng)校正與剩余相位補(bǔ)償一般在距離多普勒域進(jìn)行。距離向壓縮及RCMC以后,通過距離向IFT進(jìn)入距離多普勒域,方位壓縮、方位走動(dòng)校正與剩余相位補(bǔ)償因子為

最后,通過方位向IFT回到距離時(shí)域、方位時(shí)域,算法推導(dǎo)結(jié)束,流程圖如圖1所示。
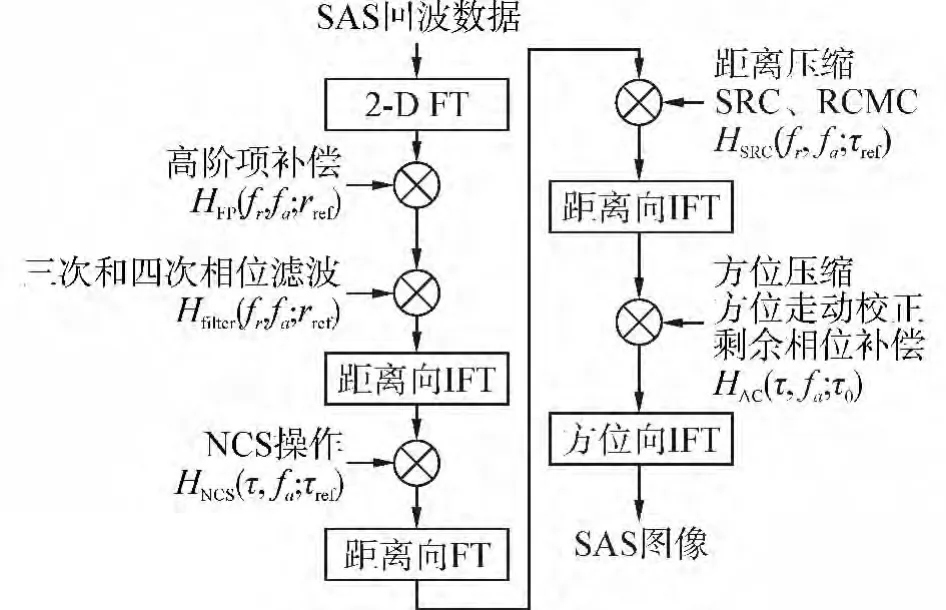
圖1 本文算法流程圖Fig.1 Block diagram of the proposed algorithm
3 測(cè)繪帶寬的影響因素分析
上述擴(kuò)展的NCS算法推導(dǎo)過程中主要的近似處理有2項(xiàng):第1項(xiàng)是泰勒級(jí)數(shù)展開近似至四階,四階以上高階項(xiàng)用參考距離處的補(bǔ)償因子予以補(bǔ)償;第2項(xiàng)是僅考慮等效調(diào)頻斜率隨Δτ的一階線性和二階非線性變化特性,忽略其高階特性。由于這兩項(xiàng)操作會(huì)帶來(lái)一定的相位誤差,若要使得該部分相位誤差低于π/8,測(cè)繪帶寬必然會(huì)受到一定影響,下面分別進(jìn)行具體分析。
3.1 泰勒級(jí)數(shù)展開近似對(duì)測(cè)繪帶寬的影響
對(duì)φ(fr,fa;r)進(jìn)行泰勒級(jí)數(shù)展開并保留低階項(xiàng)的前提條件是要求下式成立:

該式表明帶寬載頻比越小、方位波束越窄,成像結(jié)果越精確。對(duì)于寬帶系統(tǒng)而言,fr?f0不再成立,僅保留與fr相關(guān)的低階項(xiàng)會(huì)導(dǎo)致泰勒級(jí)數(shù)近似的近似性變差,因此寬帶條件下需要保留更高階次項(xiàng)以減小泰勒近似帶來(lái)的相位誤差。該文對(duì)φ(fr,fa;r)進(jìn)行泰勒級(jí)數(shù)展開并保留至四階,并用參考距離處的高階相位項(xiàng)補(bǔ)償四階以上項(xiàng)高階相位,以便降低寬帶條件下泰勒近似帶來(lái)的相位誤差。該操作引入的相位誤差可以表示為

用ΔRswath表示測(cè)繪帶寬度,即有



圖2繪制了ΔRswath隨Br和f0的變化規(guī)律,仿真過程中取d=0.08 m,c=1 500 m/s。其中,圖2(a)繪制了ΔRswath隨Br和f0的二維變化情況,圖2(b)~(d)繪制了3種不同信號(hào)帶寬情況下,ΔRswath隨f0的變化情況。單獨(dú)看圖2(b)~(d)可以發(fā)現(xiàn),當(dāng)Br固定時(shí),ΔRswath隨著f0的增大而增大。縱向比較圖2(b)~(d)可以發(fā)現(xiàn),f0不變時(shí),ΔRswath隨著Br的增大而急劇減小。也就是說,ΔRswath與Br/f0成反比。這恰好說明了窄帶條件下泰勒級(jí)數(shù)展開并保留低階項(xiàng)對(duì)測(cè)繪帶寬影響不大,寬帶條件下應(yīng)用泰勒級(jí)數(shù)展開近似時(shí)必須保留更高階項(xiàng),以防止測(cè)繪帶寬的急劇下降。
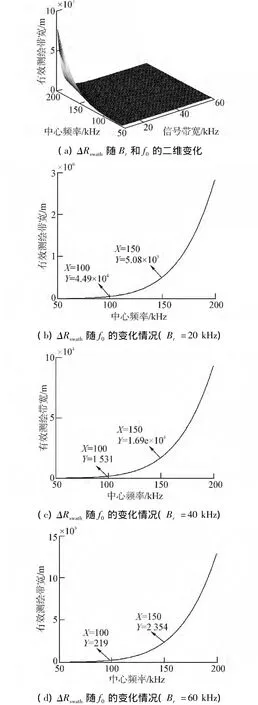
圖2 ΔRswath隨Br及f0的變化規(guī)律Fig.2 ΔRswathvarying with Brand f0
3.2 等效調(diào)頻斜率近似對(duì)測(cè)繪帶寬的影響
由式(9)可知,等效調(diào)頻斜率被近似至?xí)r延差量的二階項(xiàng),該近似引起的誤差可以表示為


令式(34)等式右側(cè)為 Δφ'2,若 Δφ'2<π/8,那么必然成立,此時(shí)測(cè)繪帶寬取值范圍為

圖3繪制了傳統(tǒng)NCS算法[8]和本文的擴(kuò)展NCS算法的等效調(diào)頻斜率近似導(dǎo)致的ΔRswath隨Br及f0的變化關(guān)系,仿真過程中取d=0.08 m,c=1 500 m/s,Tr=20 ms,其中Tr表示信號(hào)脈寬。另外,信號(hào)調(diào)頻斜率可以通過公式Kr=Br/Tr求得。其中,圖3(a)繪制了傳統(tǒng)NCS算法中等效調(diào)頻斜率近似導(dǎo)致的ΔRswath隨信號(hào)載頻f0及帶寬Br的變化關(guān)系,圖3(b)繪制了本文擴(kuò)展NCS算法中等效調(diào)頻斜率近似導(dǎo)致的ΔRswath隨信號(hào)載頻f0及帶寬Br的變化關(guān)系。觀測(cè)圖3可以發(fā)現(xiàn),隨著帶寬頻率比的不斷提高,有效測(cè)繪帶寬急劇下降,這表明適應(yīng)于窄帶條件的有效測(cè)繪帶寬并不一定適應(yīng)于寬帶條件。
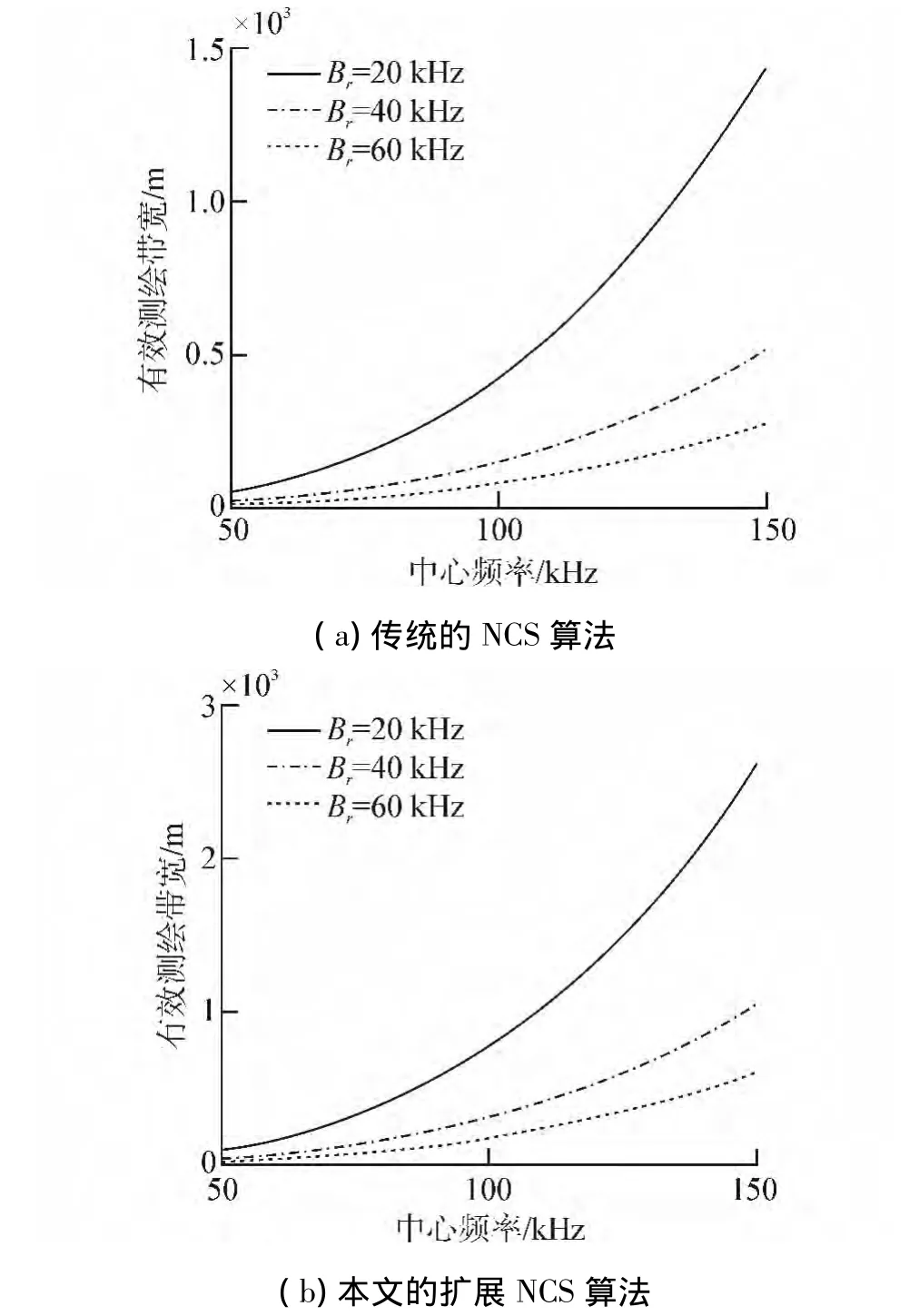
圖3 不同算法中ΔRswath隨Br及f0的變化規(guī)律Fig.3 ΔRswafthvarying with Brand f0in different algorithms
當(dāng)中心頻率為100 kHz時(shí),表1繪制了不同帶寬時(shí)的有效測(cè)繪帶寬。從表1可以發(fā)現(xiàn),當(dāng)帶寬分別為20、40、60 kHz時(shí),傳統(tǒng)NCS算法的有效測(cè)繪帶寬分別為421.70、149.10、81.15 m,而本文擴(kuò)展的 NCS 算法可以分別達(dá)到 763.1、302.8、176.4 m。對(duì)比之后可以發(fā)現(xiàn),無(wú)論是窄帶條件還是寬帶條件,本文擴(kuò)展的NCS算法均具有比傳統(tǒng)的NCS算法更寬的有效測(cè)繪帶寬。
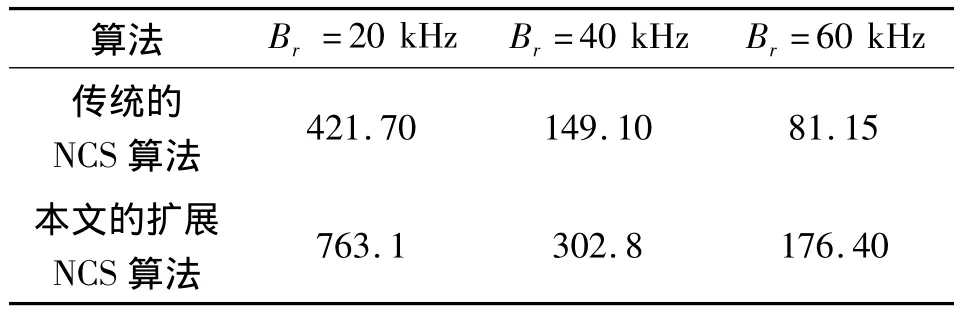
表1 不同Br時(shí)的有效測(cè)繪帶寬Table 1 Mapping swath in different Br m
3.3 分析與討論
通過上述分析可以發(fā)現(xiàn)以下2點(diǎn)結(jié)論:1)窄帶條件下,泰勒級(jí)數(shù)展開近似并保留二階項(xiàng)對(duì)有效測(cè)繪帶寬幾乎沒有影響,但在寬帶條件下,必須保留更高階項(xiàng)以避免有效測(cè)繪帶寬的急劇下降;2)等效調(diào)頻斜率通常通過泰勒級(jí)數(shù)展開成時(shí)延或距離差量的函數(shù),保留的階數(shù)越高,對(duì)有效測(cè)繪帶寬的影響越小。本文擴(kuò)展的NCS算法正是在此基礎(chǔ)上提出的,從而與傳統(tǒng)NCS算法相比具有更好的寬測(cè)繪帶適應(yīng)性。另外,上述2種近似均對(duì)測(cè)繪帶寬有影響,在實(shí)際應(yīng)用時(shí)需要綜合考慮。
4 仿真試驗(yàn)
為了驗(yàn)證擴(kuò)展的NCS算法的有效性,本節(jié)分別利用傳統(tǒng)的 NCS算法[8]、改進(jìn)的 NCS算法[16]以及本文算法對(duì)成像場(chǎng)景參考點(diǎn)(100 m,0 m)及邊緣點(diǎn)(60 m,0 m)處的點(diǎn)目標(biāo)仿真數(shù)據(jù)進(jìn)行處理,仿真參數(shù)如表2所示。假設(shè)成像場(chǎng)景的測(cè)繪帶中心與SAS航線之間的垂直距離為100 m。為考察不同成像算法的成像指標(biāo),仿真過程中,距離向和方位向處理均不進(jìn)行任何加權(quán),且以測(cè)繪帶中心位置為參考距離。需要注意的是,此時(shí)的帶寬載頻比達(dá)到66.67%,能夠滿足SAS成像的寬帶條件。
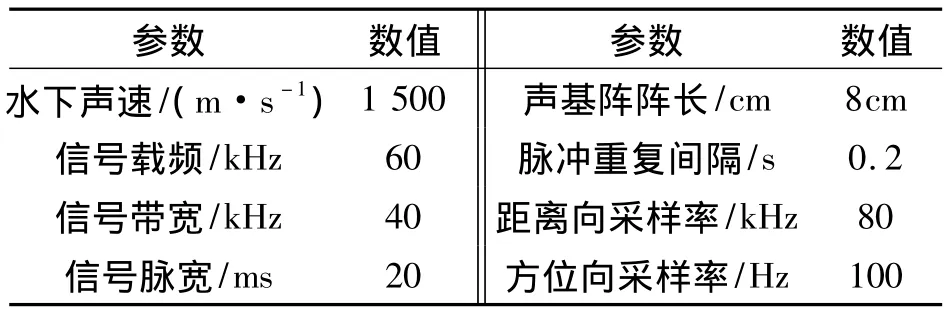
表2 仿真參數(shù)Table 2 Simulation parameters
圖4(a)~(c)分別繪制了利用傳統(tǒng)NCS算法、改進(jìn)的NCS算法和本文算法對(duì)參考點(diǎn)(100 m,0 m)處點(diǎn)目標(biāo)數(shù)據(jù)進(jìn)行處理得到的結(jié)果,其中橫坐標(biāo)表示距離向,縱坐標(biāo)表示方位向。對(duì)比發(fā)現(xiàn),3種算法均能實(shí)現(xiàn)參考點(diǎn)(100 m,0 m)處點(diǎn)目標(biāo)的良好聚焦。
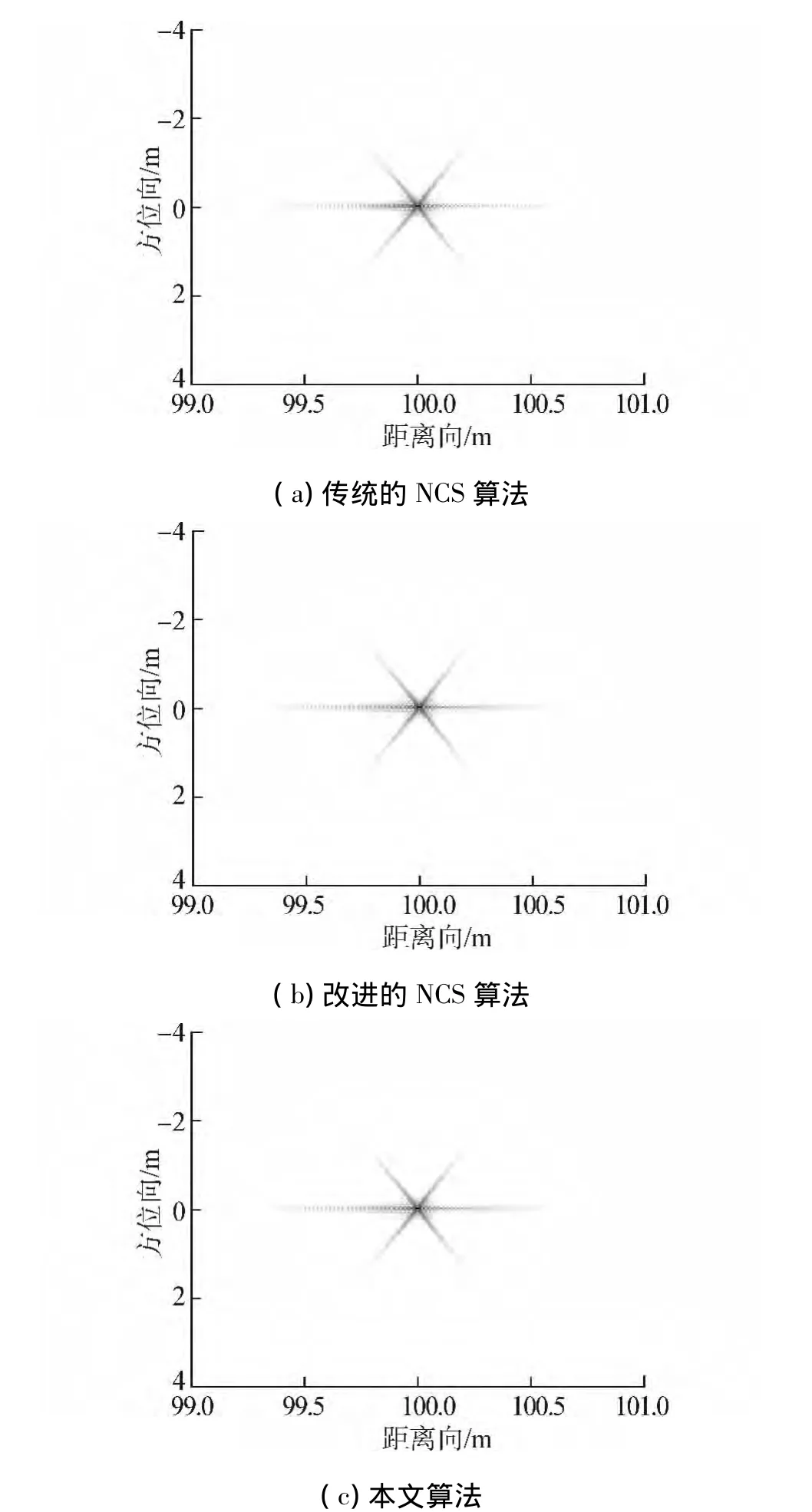
圖4 參考點(diǎn)(100 m,0 m)處點(diǎn)目標(biāo)成像結(jié)果Fig.4 Imaging result of the reference point target located at(100 m,0 m)
圖5繪制了3種算法對(duì)邊緣點(diǎn)(60 m,0 m)處點(diǎn)目標(biāo)數(shù)據(jù)進(jìn)行處理得到的結(jié)果。隨著測(cè)繪帶寬的增大,傳統(tǒng)NCS算法和改進(jìn)的NCS算法均出現(xiàn)較為明顯的散焦現(xiàn)象,分別如圖5(a)和5(b)所示。前者散焦的原因在于僅考慮fr二階項(xiàng)的距離空變性,且認(rèn)為三階及三階以上項(xiàng)是距離空不變的。另外,也與該算法中等效調(diào)頻斜率近似時(shí)僅考慮時(shí)延差量的一階項(xiàng)有關(guān)。后者散焦的原因在于其推導(dǎo)由三次和四次相位濾波以及NCS操作引入的相關(guān)變量時(shí),僅部分考慮了等效調(diào)頻斜率隨時(shí)延差量的二階項(xiàng)。由于本文算法并不存在這些近似,故而獲得了較好的成像效果,如圖5(c)所示。縱向比較圖4(c)和5(c)可以發(fā)現(xiàn),測(cè)繪帶寬的增加對(duì)本文所提算法的成像質(zhì)量影響不大。評(píng)價(jià)SAS成像算法優(yōu)劣的指標(biāo)通常包含兩方面:3 dB脈沖響應(yīng)寬度(impulse response width,IRW)和峰值旁瓣比(peak sidelobe ratio,PSLR)。表3對(duì)3種成像算法在方位向的脈壓效果進(jìn)行了對(duì)比,從結(jié)果可以看出本文算法在處理寬帶寬測(cè)繪帶數(shù)據(jù)時(shí)具有一定的優(yōu)越性。
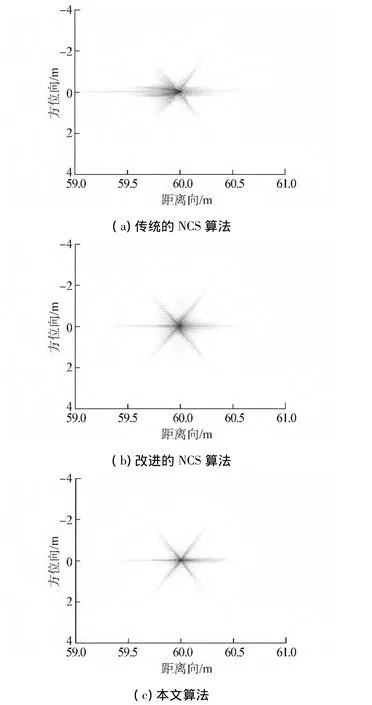
圖5 邊緣點(diǎn)(60 m,0 m)處點(diǎn)目標(biāo)成像結(jié)果Fig.5 Imaging result of the edge point target located at(60 m,0 m)
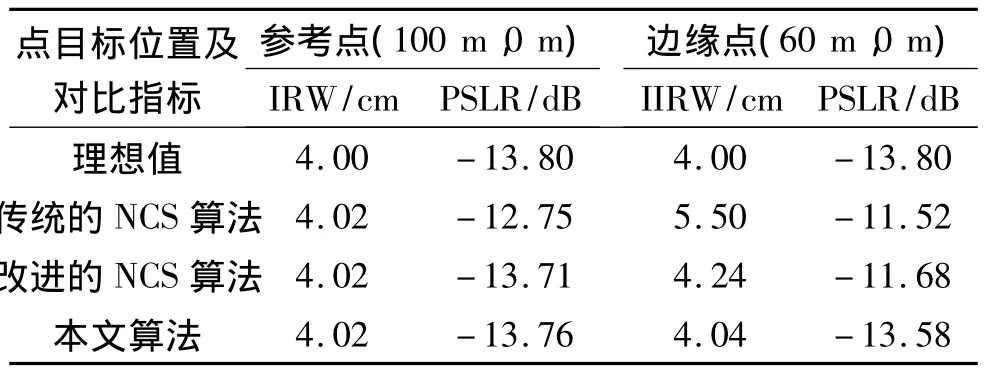
表3 3種算法方位向脈壓效果對(duì)比Table 3 Comparison of the azimuth compression effect processed by three different algorithms
5 結(jié)束語(yǔ)
針對(duì)寬帶寬測(cè)繪帶SAS成像的需求,本文繼續(xù)改進(jìn)NCS算法,通過保留距離向頻率的四階項(xiàng),使得改進(jìn)算法滿足寬帶需求,通過充分考慮等效調(diào)頻斜率的一階線性及二次非線性變化特性使得改進(jìn)算法滿足寬測(cè)繪帶需求。由于本文在推導(dǎo)由三次和四次相位濾波及NCS操作引入的相關(guān)參量時(shí),充分考慮了等效調(diào)頻斜率隨時(shí)延差量的二階非線性變化,不僅有效提高了成像質(zhì)量,而且大大提高了寬帶條件下SAS成像的寬測(cè)繪帶需求。遺憾的是,由于收發(fā)合置SAS系統(tǒng)的實(shí)測(cè)數(shù)據(jù)并不多見,因此本文沒能進(jìn)行實(shí)測(cè)數(shù)據(jù)成像試驗(yàn)。
由于水下聲速較低,傳統(tǒng)的收發(fā)合置SAS不能同時(shí)兼顧高的方位向分辨率和高的測(cè)繪速率,多子陣技術(shù)的提出有效的解決了這一問題。如何將本文所提算法應(yīng)用于寬帶寬測(cè)繪帶多子陣SAS成像是下一步研究的主要內(nèi)容。
[1]DOUGLAS B L,LEE H.Synthetic aperture active sonar imaging[C]//IEEE International Conference on Acoustics,Speech,and Signal Processing.San Francisco,USA,1992:37-40.
[2]SILKAITIS J M,DOUGLAS B L,LEE H.Synthetic-aperture sonar imaging:system analysis,image formation,and motion compensation[C]//Conference Record of the Twenty-Ninth Asilomar Conference on Signals,Systems and Computers.Pacific Grove,USA,1995:423-427.
[3]LI Y L,YAN S S,ZHU G F,et al.Ultra wide band synthetic aperture radar real time processing with a subaperture nonlinear chirp scaling algorithm[C]//International Asia-Pacific Conference on Synthetic Aperture Radar.Seoul,Korea,2011:1-4.
[4]HAYES M P,GOUGH P T.Broad-band synthetic aperture sonar[J].IEEE Journal of Oceanic Engineering,1992,17(1):80-94.
[5]楊海亮,張森,唐勁松.寬測(cè)繪帶多陣合成孔徑聲納成像的仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2011,23(7):1424-1428.YANG Hailiang,ZHANG Sen,TANG Jinsong.Study on Simulation of multiple-receiver synthetic aperture sonar imagery based on wide swath[J].Journal of System Simulation,2011,23(7):1424-1428.
[6]RANEY R K,RUNGE H,BAMLER R,et al.Precision SAR processing using chirp scaling[J].IEEE Transactions on Geoscience and Remote Sensing,1994,32(4):786-799.
[7]CHANG C Y,JIN M,CURLANDER J C.Squint mode SAR processing algorithms[C]//Geoscience and Remote Sensing Symposium,12th Canadian Symposium on Remote Sensing.Vancouver,Canada,1989:1702-1706.
[8]DAVIDSON G W,CUMMING I G,ITO M R.A chirp scaling approach for processing squint mode SAR data[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(1):121-133.
[9]WANG K Z,LIU X Z.Improvement of non-linear chirp scaling algorithm[C]//International Conference on Computational Electromagnetics and its Applications.Beijing,China,2004:391-394.
[10]AN D X,HUANG X T,JIN T,et al.Extended nonlinear chirp scaling algorithm for high-resolution highly squint SAR data focusing[J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(9):3595-3609.
[11]SUN G C,XING M D,LIU Y,et al.Extended NCS based on method of series reversion for imaging of highly squinted SAR[J].IEEE Geoscience and Remote Sensing Letters,2011,8(3):446-450.
[12]SUN G C,JIANG X W,XING M D,et al.Focus improvement of highly squinted data based on azimuth nonlinear scaling[J].IEEE Transactions on Geoscience and Remote Sensing,2011,49(6):2308-2321.
[13]NIEVES E G,LOPEZ J M,VILLALOBOS C P.Extension of the chirp scaling algorithm to 3-D near-field wideband radar imaging[J].IEEE Proceedings Radar,Sonar and Navigation,2003,50(3):152-157.
[14]POTSIS A,REIGBER A,MITTERMAYER J,et al.Improving the focusing properties of SAR processors for wideband and wide-beam low frequency imaging[C]//IEEE International Geoscience and Remote Sensing Symposium.Sydney,Australia,2001:3047-3049.
[15]劉光平.超寬帶合成孔徑雷達(dá)高效成像算法[D].長(zhǎng)沙:國(guó)防科技大學(xué),2003:47-57.LIU Guangping.Efficient imaging generation for ultra-wide band synthetic aperture radar[D].Changsha:National U-niversity of Defense Technology,2003:47-57.
[16]楊海亮.多接收陣合成孔徑聲納成像算法研究[D].武漢:海軍工程大學(xué),2009:106-118.YANG Hailiang.Studies on imaging algorithm of multiplereceiver synthetic aperture sonar[D].Wuhan:Naval University of Engineering,2009:106-118.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
浙江國(guó)土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
江西建材(2018年4期)2018-04-10 12:37:38
中國(guó)公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00