具有交叉擴散的捕食食餌模型穩定性的分析
2015-08-25 06:10:55劉陽陽
東華大學學報(自然科學版) 2015年3期
劉陽陽
(東華大學 理學院,上海201620)
具有交叉擴散的捕食食餌模型穩定性的分析
劉陽陽
(東華大學 理學院,上海201620)
研究了一類帶有Leslie-Gower功能性反應的捕食食餌模型, 主要應用Routh-Hurwitz理論討論了交叉擴散引起的穩定性變化, 建立了關于非平凡正平衡解穩定性的充分條件, 并通過數值模擬驗證了相應的理論結果.
捕食食餌模型; Leslie-Gower功能性反應; 交叉擴散; 穩定性
在大多數描述擴散系統動力學的文獻中, 自擴散對系統的影響往往是學者關注的焦點. 近年來, 越來越多的學者開始關注交叉擴散對系統的影響. 本文將考慮帶有Holling-Ⅱ和Leslie-Gower功能性反應的捕食者食餌模型, 在這個模型中加入了自擴散項和交叉擴散項. 帶有自擴散的模型如下:
其中:H和P分別表示被捕食者和捕食者在時間T的種群密度;D11和D22為自擴散系數;A1,B1,C1,K1,A2,C2和K2為系統參數并且都是正數. 借助文獻[1]中的變換可以得到:
(1)
文獻[1]研究了系統(1)當a=1和d11=1時的非平凡正平衡解的圖靈不穩定和Hopf分支問題. 文獻[2]研究了系統(1)當k1=1和k2=0時的非平凡正平衡解的穩定性、圖靈不穩定和Hopf分支問題, 同時, 通過計算Hopf分支的方向, 得到了空間齊次周期解并且判斷這些解是否穩定.
然而在自然界中, 生物種群不會漫無目的地向外擴散, 被捕食者想向捕食者密度小的方向運動, 捕食者向被捕食者密度大的地方運動. 事實上, 自擴散只能表示生物種群向外擴散, 不能夠確切地描述生物趨利避害自然本性. 此時, 交叉擴散的出現就顯得尤為重要. 考慮到生物種群的這種自然本性, 在本文中考慮如下模型:
(2)
其中:d11和d22為自擴散系數;d12和d21為交叉擴散系數. 文獻[3]分析了帶有Holling-II功能性反應系統中空間變量是一維和二維兩種情形下的全局穩定性, 并分別得到了由自擴散和交叉擴散引起的斑圖, 這里的擴散系數均是常數, 此外, 也研究了當交叉擴散系數是時間變量情形下非平凡正平衡解的穩定性. 文獻[4]研究了當d11=d22=1時系統(2)非平凡正平衡解的圖靈不穩定性, 在這種情形下的不穩定性只是由交叉擴散引起的. 另外, 交叉擴散也被應用到半干旱生態系統中, 用交叉擴散來描述半干旱系統中水分的流動. 除此之外, 交叉擴散還被學者應用于更多的模型[5-10].
本文利用文獻[11]的方法研究系統(2)和(3)的穩定性及Hopf分支,具體分下面3種情形討論交叉擴散對系統(1)非平凡正平衡解穩定性的影響: (1)d12=0,d21≠0; (2)d12≠0,d21=0; (3)d12≠0,d21≠0. 在第3種情形中, 相較于文獻[4]限制d11=d12=1的討論, 這里會分析交叉擴散系數取不同值的情形下對系統穩定性的影響.
1 一維情形正平衡點穩定性分析
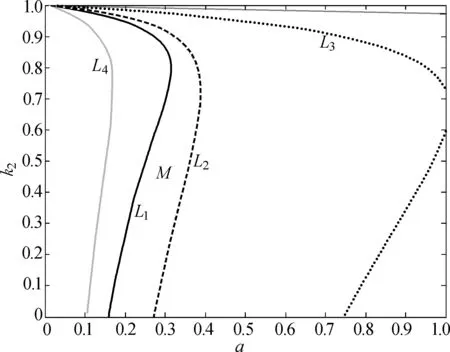
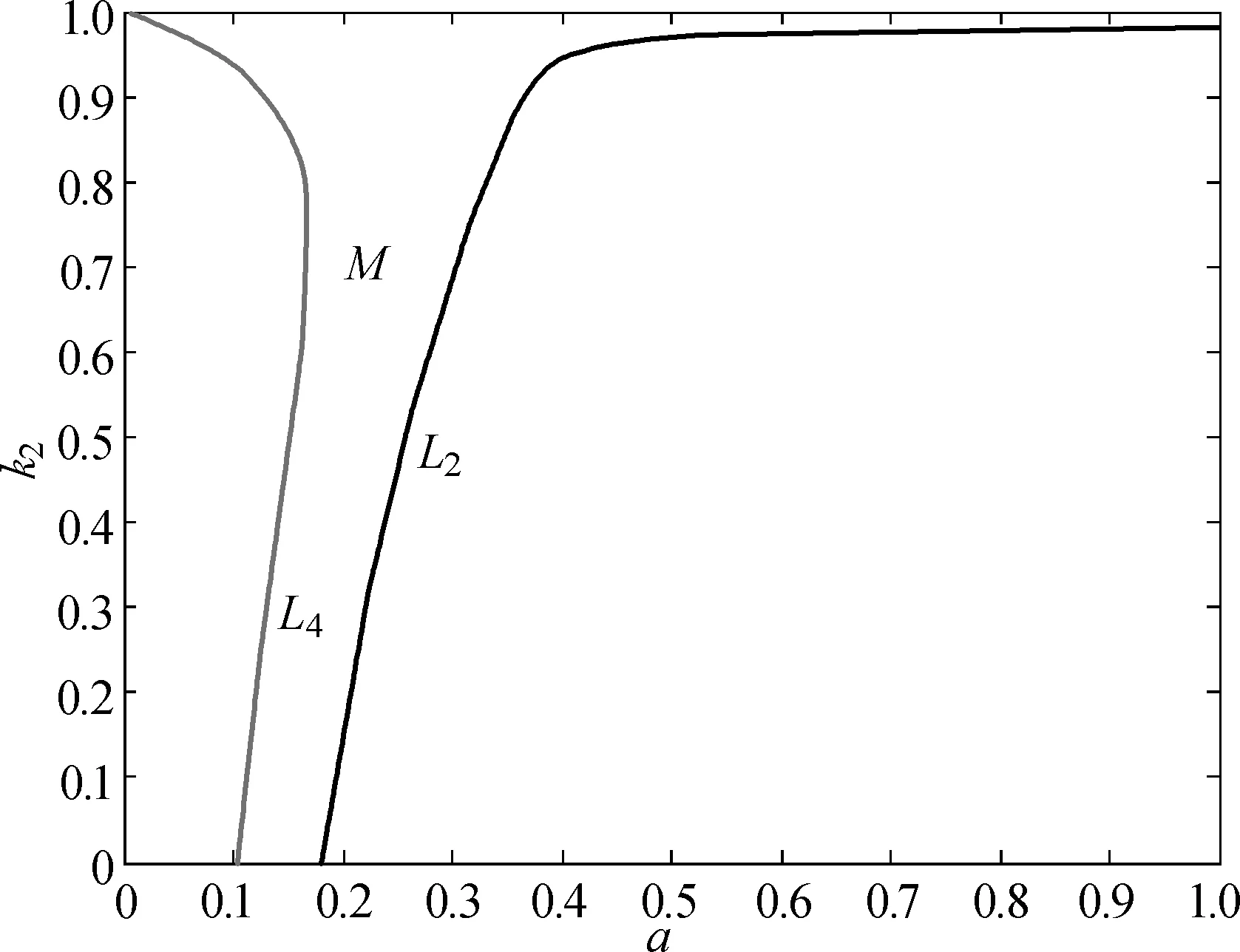
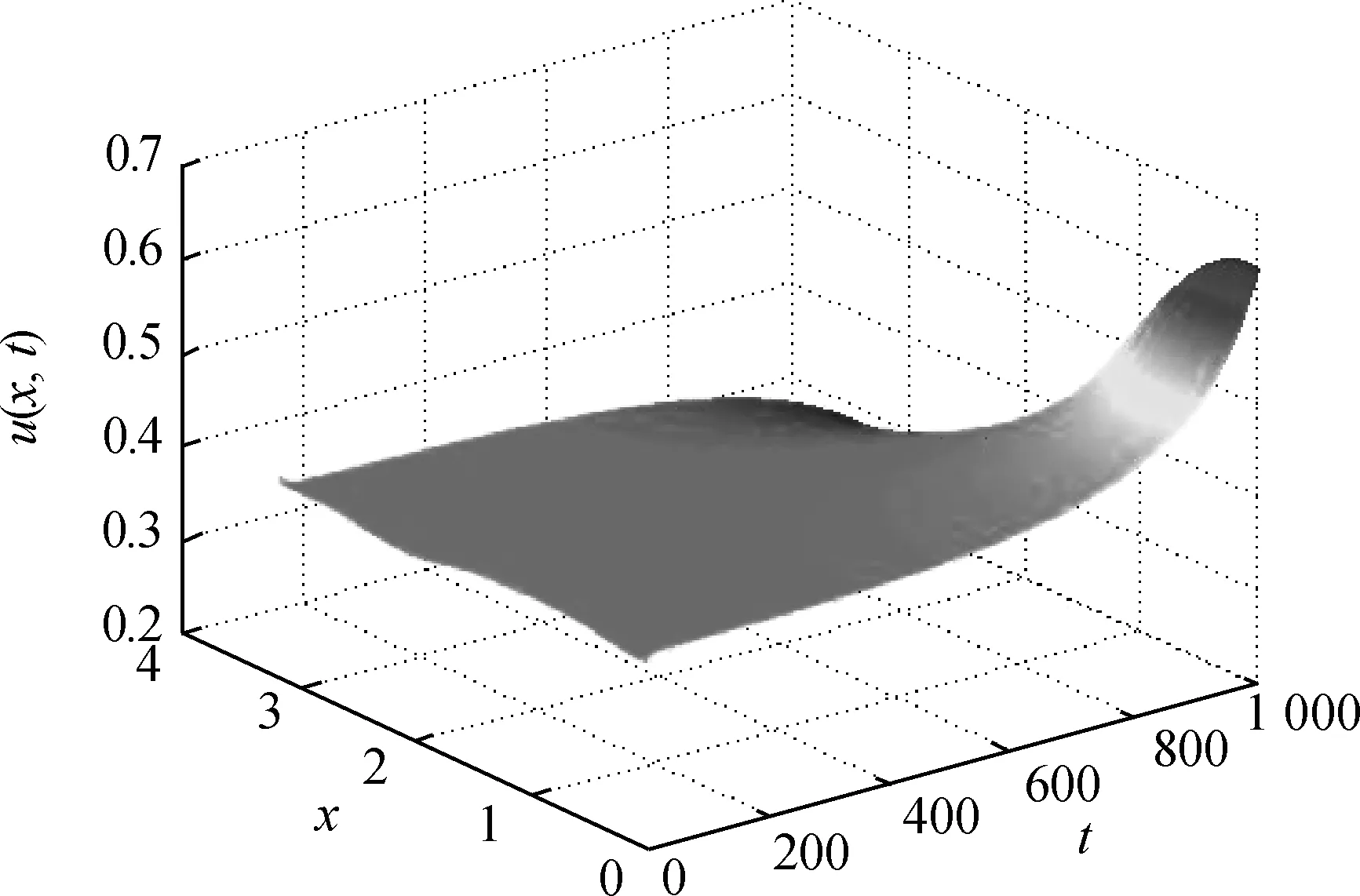
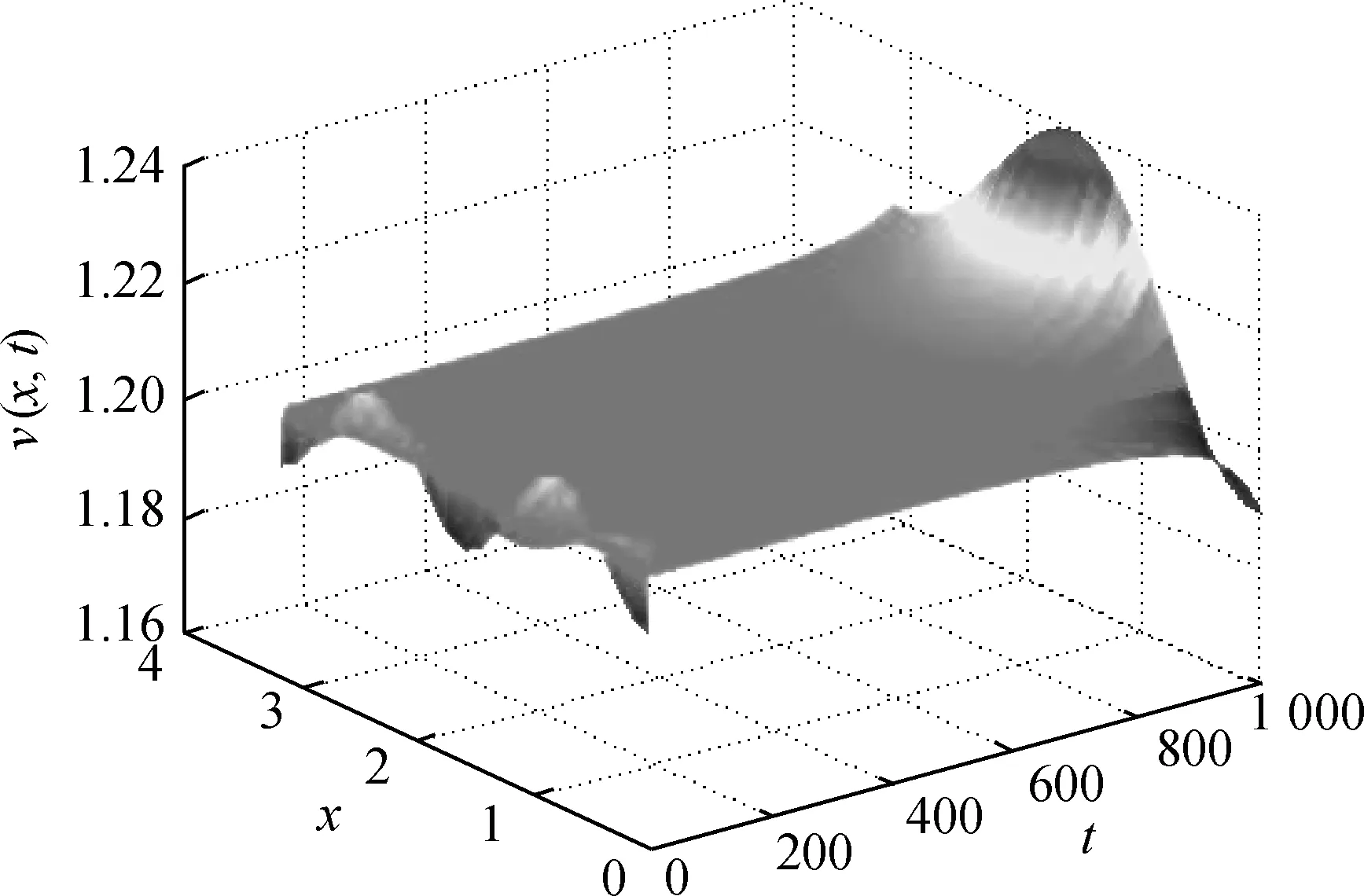
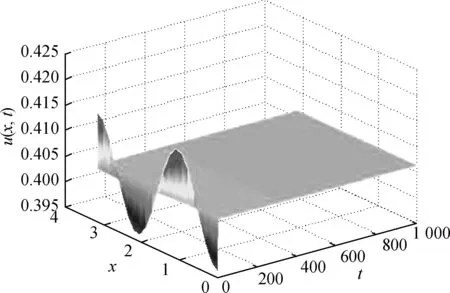
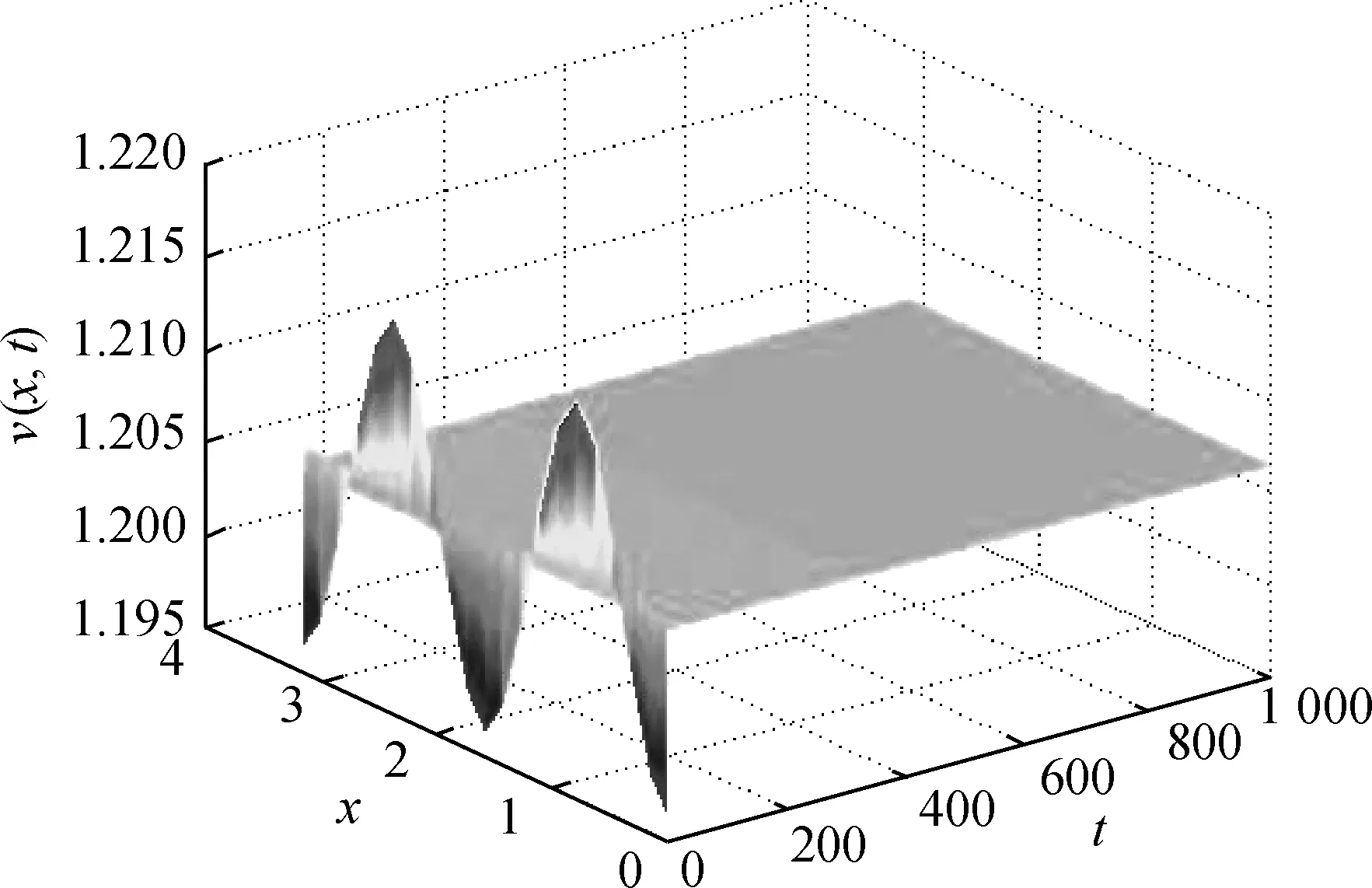
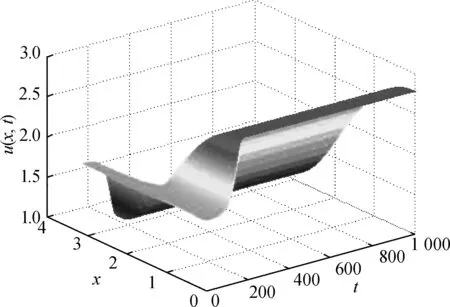
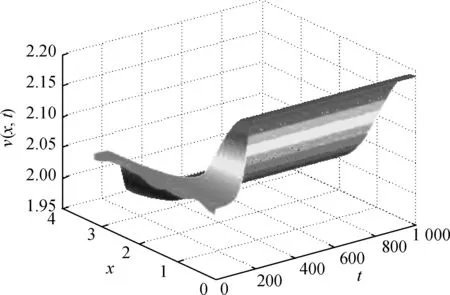
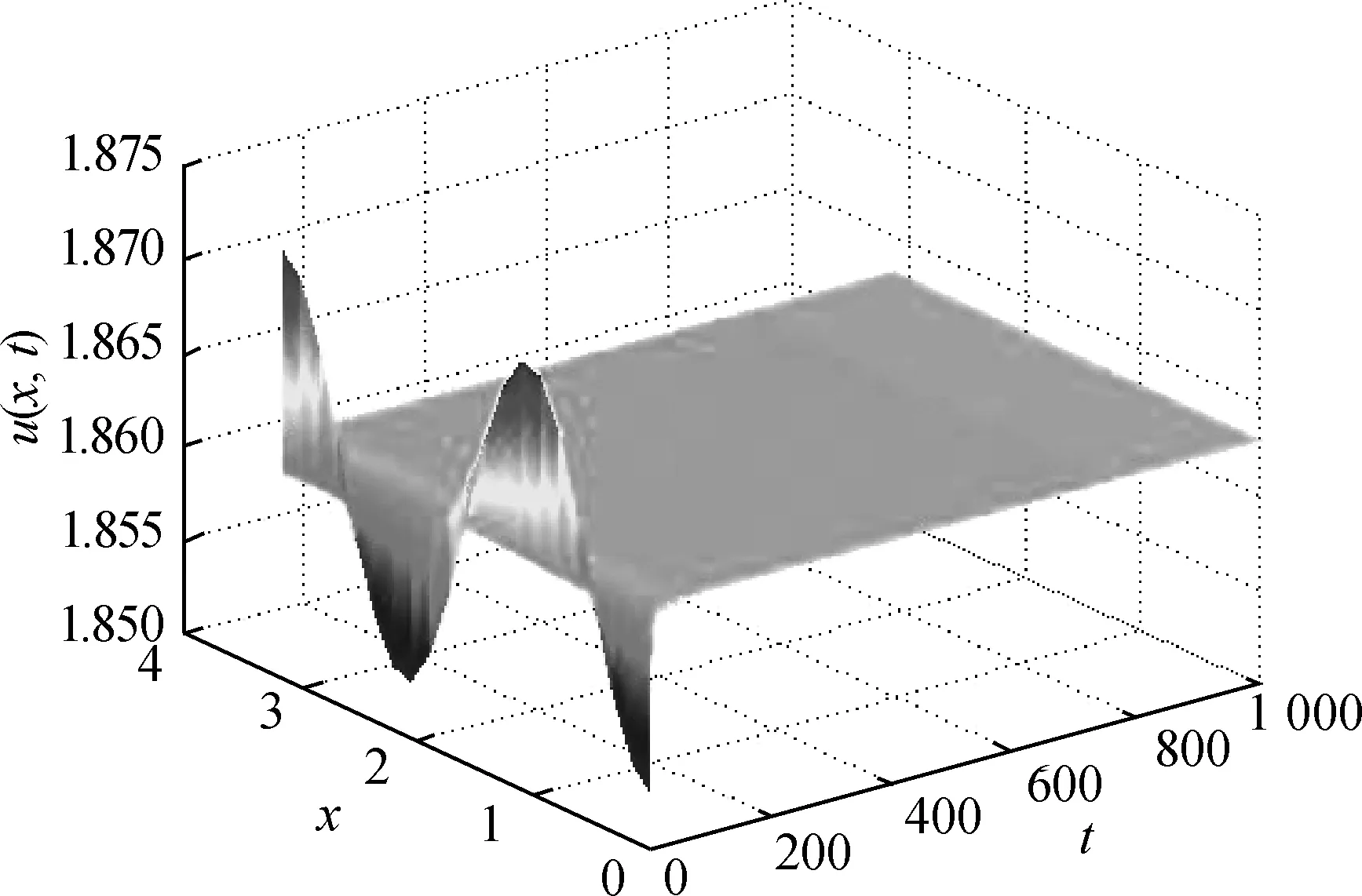
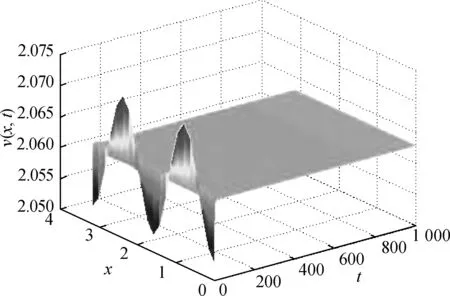
(H)bk2 成立, 有一個正的內部平衡點E*=(U*,V*), 這里 V*=U*+k2. 當空間變量是一維時, 系統(2)在E*處對應的線性系統為 (3) 下面尋求如下形式的特征函數: 和系統(3)的如下形式的解: 系統(3)的特征方程為 λ2-Tnλ+Dn=0, (4) 其中 c(s+e). (5) 假設 (6) 由式(6)可知 s-c<0, 顯然, 在式(6)的假設下, 當d12=d21=0時, 系統(3)的正平衡解E*是穩定的; 當d12和d21不同時為零時, 系統(3)的正平衡解E*的穩定性依賴于Dn的大小. 下面討論交叉擴散對系統(3)的影響. 情形1: 當d12=0和d21≠0時, 由式(5)可知 c(s+e). 在這種情形中, 如果Dn>0, 那么E*是局部漸近穩定. Dn>0等價于 ?n>0 (7) 由此可以發現, 如果d21<0, 式(7)顯然成立, 從而E*是局部漸近穩定的. 從交叉擴散的生物意義得知, 如果捕食者向被捕食者密度高的方向運動, 并且被捕食者無目的運動, 那么E*是局部漸近穩定的. 如果d21>0并且至少存在一個n使 (8) 成立, 那么意味著如果d21>0和臨界波長充分小使式(8)成立時, E*是不穩定的. 這種現象在自然界中的表現, 即為捕食者向被捕食者密度低的方向運動, 并且被捕食者無目的運動, 那么E*是不穩定的. 情形2: 當d12≠0和d21=0時, 由式(5)知 c(s+e). 在這種情形中, 如果Dn>0, 那么E*是局部漸近穩定的. Dn>0等價于 ?n>0 (9) 由此可以發現, 如果d12>0, 式(9) 顯然可以成立, 從而E*是局部漸近穩定的. 從交叉擴散的生物意義得知, 如果被捕食者向捕食者密度低的方向運動, 并且捕食者無目的運動, 那么E*是局部漸近穩定的. 如果d12<0并且至少存在一個n使 (10) 成立, 那么意味著如果d21<0和臨界波長充分小使式(10)成立時, E*是不穩定的. 這種現象在自然界中的表現, 即為被捕食者向捕食者密度高的方向運動, 并且捕食者無目的運動, 那么E*是不穩定的. 情形3: 當d12≠0和d21≠0時, Tn和Dn如式(5)所示. 如果d12>0并且d21<0, 那么Dn>0成立, 從而E*是局部漸近穩定的. 如果d12>0, d21<0不成立, 就不能采用上述兩種情形中的方法進行討論. 下面討論使E*不穩定的條件. 如果d11d22-d12d21<0, 那么必存在一些n可以使Dn<0, 這種情況是顯而易見的. 當d11d22-d12d21>0, 假設在 (H1)(d11c-d12s+d12c+d21e)2+ 4(d11d22-d12d21)c(s+e)>0 成立的前提下, 如果 d11c-d22s+d12c+d21e<0 (11) 成立, 那么特征方程(4)的根有正實部. 不等式(11)等價于 (12) 顯然, 如果式(12)中有一種情況成立, 那么E*是不穩定的. 根據式(12)可以得到下述定理. 定理1.1假設a, b, c, k1, k2>0, (H)和(H1)成立, 則若 當d12=d21=0時, 系統(3)的正平衡解E*是局部漸近穩定的; 當d12和d21不同時為零時, 系統(3)的正平衡解E*是圖靈不穩定的. 圖1描述了定理1.1的情形(Ⅰ). 選取擴散系數使其滿足(Ⅰ)中所給的條件, 則有E*在圖1中的區域M中是不穩定的. 類似地, 圖2描述了定理1.1的情形(Ⅱ). 圖1 定理1.1情形(Ⅰ)正平衡解E*圖靈不穩定的區域MFig.1 The areaMwhere the equilibriumE*is Turing unstable of situation (Ⅰ) in Theorem 1.1 圖2 定理1.1情形(Ⅱ)正平衡解E*圖靈不穩定的區域MFig.2 The areaMwhere the equilibriumE*is Turing unstable of situation (Ⅱ) in Theorem 1.1 引理1.1假設a, b, c, k1, k2>0, d11=d12=d21=d22=0和(H)成立. 如果 (H2)ak1≥1 成立, 系統(2)的正平衡點E*是全局漸近穩定的. 定理1.2假設a, b, c, k1, k2>0, (H)和(H2)成立, 則若 (H3)(d12α+d21β)2 成立, 這里 證明令 (13) 當空間變量是二維時, 討論正平衡點的全局穩定性. 類似定理1.2, 將給出二維情形下全局穩定性的定理. 定理2.1假設a, b, c, k1, k2>0, (H)和(H2)成立. 若(H3)成立, 系統(2)的正平衡點E*是全局漸近穩定的. 證明令 這里, W(U,V)在定理1.2的證明中已經給出定義. 將上式兩邊同時微分有 同理, 當(H3)成立時, 上式的第二個積分項和第三個積分項是大于零的. 同時, 當(H2)成立時,. 綜上, 定理得證. 這里將通過數值模擬驗證定理1.1. 由于文獻[5]已經討論過 d12=d21=1的情況, 所以將避免再取這樣的數值, 從而能更清楚地看到交叉擴散系數取不同數值時系統(3)的解. 將一些參數固定, 并且令a和k2在圖1和2的區域M中取值. 在圖1中, 當(a,k2)∈M時, 正平衡點E*是圖靈不穩定的, 將得到對應的解如圖3所示. 由定理1.1可知,這里的圖靈不穩定是僅由交叉擴散引起的, 當d12和d21重新賦值為0時, 正平衡點E*是穩定的, 將會得到穩定的解如圖4所示. 同理, 令a和k2在圖2中的區域M取值時, 也會得到相類似的結果, 如圖5和6所示. (a)u(x,t) (b)v(x,t)圖3 當擴散系數滿足定理1.1情形(Ⅰ)時, 系統(3)的解Fig.3 The solution of the system (3) when the diffusion coefficients satisfying the situation Ⅰ of Theorem 1.1 圖3中:d11=0.1,d22=0.2,d12=0.01,d21=0.24,k1=1,k2=0.8,a=0.35,b=1,c=0.25.(a,k2)=(0.35,0.8)屬于圖1的區域M, 此時正平衡解E*是不穩定的. 初值u(x, 0)=0.4-0.01cos(3x), v(x, 0)=1.2-0.01cos(4x). (a)u(x,t) (b)v(x,t)圖4 當d12=0,d21=0時, 系統(3)的穩定的解Fig.4 The stable solution of the system (3) whend12=d21=0 圖4中:d11=0.1,d22=0.2,d12=0,d21=0,k1=1,k2=0.8,a=0.35,b=1,c=0.25.(a,k2)=(0.35,0.8)屬于圖1的區域M, 此時正平衡解E*是穩定的. 初值u(x,0)=0.4-0.01cos(3x), v(x,0)=1.2-0.01cos(4x). (a)u(x,t) (b)v(x,t)圖5 當擴散系數滿足定理1.1情形(Ⅱ)時, 系統(3)的解Fig.5 The steady state solution of the system (3) when the diffusion coefficients satisfying the situation Ⅱ of Theorem 1.1 圖5中:d11=0.1,d22=0.05,d12=-0.2,d21=0.2,k1=1,k2=0.2,a=0.15,b=1,c=0.25. (a,k2)=(0.15,0.2)屬于圖2區域M, 此時正平衡解E*是不穩定的. 初值u(x,0)=1.86-0.01cos(3x), v(x,0)=2.06-0.01cos(4x). (a)u(x,t) (b)v(x,t)圖6 當d12=0,d21=0時, 系統(3)的穩定的解Fig.6 The stable solution of the system (3)whend12=0,d21=0 圖6中:d11=0.1,d22=0.05,d12=0,d21=0,k1=1,k2=0.2,a=0.15,b=1,c=0.25. (a,k2)=(0.15,0.2)屬于圖2區域M, 此時正平衡解E*是穩定的. 初值u(x,0)=1.86-0.01cos(3x), v(x,0)=2.06-0.01cos(4x). 本文對同時帶有自擴散和交叉擴散的捕食食餌模型進行了定性分析研究,重點關注交叉擴散對系統(2)穩定性的影響, 并分了3種情況進行分析. 與文獻[4]相比, 本文得到了關于交叉擴散引起的圖靈不穩定更一般的結論, 并給出了系統(2)和系統(3)全局穩定性的結論. 通過一些數值模擬驗證理論結果,由數值模擬圖可以清楚地看出正平衡點的圖靈不穩定僅僅是由交叉擴散引起的. 事實上, 交叉擴散描述了捕食者和被捕食者有目的的運動, 所以當自擴散引起圖靈不穩定時, 交叉擴散是否可以使系統重新獲得穩定性, 這個課題有待于進一步的研究. [1] CAMARA B I, AZIZ-ALAOUI M A. Turing and Hopf patterns formation in a predator-prey model with Leslie-Gower-Type functional responses[J]. Dynamics of Continuous, Discrete and Impulsive Systems, 2009, 16(4): 478-488. [2] LI X, JIANG W H, SHI J P. Hopf bifurcation and Turing instability in the reaction-diffusion Holling-Tanner predator-prey model[J]. IMA Journal of Applied Mathematics, 2013, 78(2): 287-306. [3] UPADHYAY R K, THAKUR N K. Spatiotemporal pattern induced by self and cross-diffusion in a spatial Holling-Tanner model[J]. Computational Ecology and Software, 2012, 2(1): 1-25. [4] SUN G Q, ZHEN J, LIU Q X, et al. Pattern formation induced by cross-diffusion in a predator-prey system[J]. Chinese Physics B, 2008, 17(11):3936-3941. [5] PENG R, WANG M X. Stationary of the Holling-Tanner prey-predator model with diffusion and cross-diffusion[J]. Applied Mathematics and Computation, 2008, 196(2): 570-577. [6] TIMM U, OKUBO A. Diffusion-driven instability in a predator-prey system with time-varying diffusivities[J]. Journal of Mathematical Biology, 2013, 30(3): 307-320. [7] TIAN C R. Turing patterns created by cross-diffusion for a Holling Ⅱ and Leslie-Gower type three species food chain model[J]. Journal of Mathematical Chemistry, 2011, 49(6): 1128-1150. [8] WANG W M, GUO Z G, UPADHYAY R K, et al. Pattern formation in across-diffusive Holling-Tanner model[J]. Discrete Dynamics in Nature and Society, 2012: 1-12. [9] GOWDA K, RIECKE H, SILBER M. Transitions between patterned states in vegetation models for semi-arid ecosystems[J]. Nonlinear Sciences: Pattern Formation and Solitons, 2006,89(2): 1-9. [10] UPADHYAY R K, WANG W M. Spatiotemporal dynamics in a spatial plankton system[J]. Math Model Nat Phenom, 2010, 8(6): 1-21. [11] MARSDEN J E, SIROVICH L. Introduction to applied nonlinear dynamical systems and chaos[M]. New York: Springer-Verlag, 2003. Stability Analysis of a Predator-Prey Model with Cross-Diffusion LIUYang-yang (College of Science, Donghua University, Shanghai 201620, China) A predator-prey model incorporating the modified Leslie-Gower functional response is studied. The Routh-Hurwitz theory is applied to discuss the change of stability induced by cross-diffusion. The sufficient conditions for the stability of the nontrivial positive equilibrium is established. Then the corresponding theoretical results are verified by some numerical simulations. predator-prey model; Leslie-Gower functional response; cross-diffusion; stability 1671-0444(2015)03-0402-07 2014-04-21 國家自然科學基金資助項目(11101076) 劉陽陽(1989—),女, 黑龍江佳木斯人, 碩士研究生, 研究方向為偏微分方程. E-mail:pinyi_liu@163.com O 175.26 A


2 二維情形正平衡點穩定性分析
3 數值模擬
4 結 語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(2019年4期)2019-05-11 09:27:34數學物理學報(2018年4期)2018-09-14 03:41:02家庭影院技術(2017年9期)2017-09-26 03:41:45上海金屬(2015年5期)2015-11-29 01:13:59上海金屬(2015年6期)2015-11-29 01:09:09數學物理學報(2015年2期)2015-02-28 16:06:39
