無人船艇的發展及展望*
2015-08-26 07:46:00大連海事大學航海學院張樹凱劉正江張顯庫
世界海運 2015年9期
大連海事大學航海學院 張樹凱 劉正江 張顯庫 劉 玉
無人船艇的發展及展望*
大連海事大學航海學院 張樹凱 劉正江 張顯庫 劉 玉
近年來,無人船艇受到越來越多的關注。對無人船艇的基本概念、發展歷程、研究中涉及的關鍵技術、應用前景和發展趨勢等問題進行綜述。鑒于無人船艇在應用方面的廣闊前景,特別是隨著通信技術、人工智能等新技術、新理念的迅速發展,無人船艇的研究有了科技支撐。在未來,無人船艇有可能帶來航運業的革命,改變航運業的面貌。誰站在技術的前沿,誰就有可能成為相關巨大市場的孕育者和占有者。
無人船艇;發展歷程;關鍵技術;應用前景
近年來,無人駕駛汽車逐漸為大眾所熟悉。谷歌公司是無人駕駛汽車研發領域的先鋒。2014年5月,該公司宣布其無人駕駛汽車項目正在向排除人為干預的全自動方向發展,期望幾年內能開展公路試駕。無人機也在試圖走進人們的生活。除軍事用途外,亞馬遜創始人貝索斯在2013年12月宣布利用無人機開展遞送服務的計劃。在無人駕駛領域,相比于無人機、無人汽車,無人船艇的發展處于相對落后的狀態。
智能化一直是船舶發展的趨勢。近年來,隨著物聯網、大數據、云計算、人工智能等新理念、新技術的突飛猛進,船舶自動化水平不斷提高,無人船艇的實現有了科技支撐,無人駕駛船舶航行于全球有了實現的可能性。
一、無人船艇的發展回顧
無人船艇包括具有自主規劃、自主航行、自主環境感知能力的全自主型無人船艇,以及非自主航行的遙控型無人船艇和按照內置程序航行并執行任務的半自主型無人船艇。它集船舶設計、人工智能、信息處理、運動控制等專業技術為一體,研究內容涉及自動駕駛、自主避障、規劃與導航、模式識別等多方面,可根據其作戰或使用功能的不同,采用不同的模塊,搭載不同的傳感器及設備,執行情報收集、監視偵察、掃雷、反潛、反恐、精確打擊、搜尋救助、水文地理勘察、中繼通信等任務。[1-5]
1. 早期的無人船艇
無人船艇的發展最早可追溯到1898年,當時著名發明家尼古拉·特拉斯發明了名為“無線機器人”的遙控艇。無人艇在實戰中的首次亮相是在二戰時期,最初只作為一次性的制導武器使用。在諾曼底登陸戰役期間,盟軍曾設計出一種裝載煙幕劑的可按預定航向自動駛往目的海域的無人艇,以達到戰略欺騙和作戰掩護的作戰需要。二戰后期,美國海軍曾通過在小型登陸艇上加裝無線電控制的操舵裝置和掃雷裝置,用于淺海雷區掃雷作業。二戰結束后,無人艇主要用于掃雷和戰場損傷評估等任務。[6-8]這些早期的無人艇大多由電纜發送的導航信號或母艦通過無線電控制,自主活動能力非常有限。
20世紀50年代,前蘇聯曾利用小型遙控式無人水面艇,用于向敵艦發動自殺式攻擊;[9]在60年代后期,美國將V-8汽油機驅動的7 m長玻璃鋼小艇改裝為“拖鏈式”遙控掃雷艇,以執行越南境內的掃雷作業。[8]20世紀七八十年代,由于技術的限制,無人船艇的發展并未獲得很大突破,主要用于軍事演習和火炮射擊的海上靶標。[10]
20世紀90年代,隨著人們對無人船艇認識的深入,無人水面艇在反潛、反水雷、海上偵察監視、目標搜索等方面的潛能漸漸顯露出來。美國研制的“遙控獵雷作戰原型艇”(Remote Mine-hunting Operational Prototype,RMOP)在1997年1月成功以“庫欣”號驅逐艦作為母船進行了海上獵雷行動演習。[8]在這期間,美國NavTec公司研發的噴水動力的“Owl MK II”號無人艇在隱蔽性和配重能力上有顯著提高,并具有側掃聲吶和攝像功能。[11]
2. 現代無人船艇
進入21世紀,隨著通信、人工智能等技術的發展,制約無人船艇發展的諸多技術瓶頸得以部分解決,各國加大了無人船艇的研發力度,無人船艇迎來了一段高速發展期。
美國海軍水下作戰中心聯合Radix Marine公司、Northrop Grumman公司和Raytheon公司于2002年起合作開發“斯巴達偵察兵”(Spartan Scout)號無人艇,如圖1所示。其目標是研發具有模塊化、可重構、多任務、高速、半自主航行的無人船艇。[12]“斯巴達偵察兵”是一艘可充氣的硬質船艇,船長11 m,航速可達50 kn。目前能夠完成情報收集、監視和偵察、反潛、精確打擊等任務。

圖1 “Spartan Scout”號無人艇
以色列擁有豐富的無人船艇研制技術。由以色列研發的“保護者”(Protector)號無人艇于2003年向以色列國防軍交付,見圖2。“保護者”是一艘硬殼充氣艇,船長11 m,船速可達40 kn,加載了前視紅外傳感器、照相機/攝像機、激光測距儀、搜索雷達、關聯跟蹤器等。在武器方面搭載了機槍、自動榴彈發射器、計算機火控系統等一套綜合無人作戰系統。“保護者”采用模塊化設計,并考慮了隱身性,在建造時大量使用碳纖維及輕質復合材料取代傳統的鋼材料以減輕艇體重量。該艇性能優越,可滿足多種任務需求,擁有廣闊的應用前景。[13]

圖2 “Protector”號無人艇
2005年以色列Elbit公司研制的“Stingary”號無人艇,具有船型小、隱蔽性好等特點,可完成海岸物標識別、智能巡邏、電子戰爭等多項任務。[14]法國2006年交付海軍測試的“Inspector”號無人船艇配備滅雷器、聲吶、聲吶規避器等;[15]2007年以色列國防部研發的中型“Silver Marlin”號無人艇,可通過岸上監控系統和衛星通信控制系統來實現控制,同時具備自動避碰、自動航行和超視距操作的功能。[16]2007年7月美國海軍發布了《海軍無人水面艇主計劃》,明確了無人艇發展的4個級別:X Class、Harbor Class、Snorkeler Class、Fleet Class,如圖3所示。4個級別在長度上依次從小到大,續航力從小到大,模塊從非標準級到標準級,任務從低層次到高層次,另外對布放方式和艇型的要求也不相同。[8]2010年,新加坡航展上展出的“Venus”號無人艇可搭載水雷戰、電子戰模塊、海上監視模塊和精確火力等模塊。[15]2011年9月美國海軍研制的模塊化三體無人快速偵察艇“X-2”號,既可利用風能也配備電動引擎,通過無線電和GPS來控制,反應靈敏,行動精確。[17]
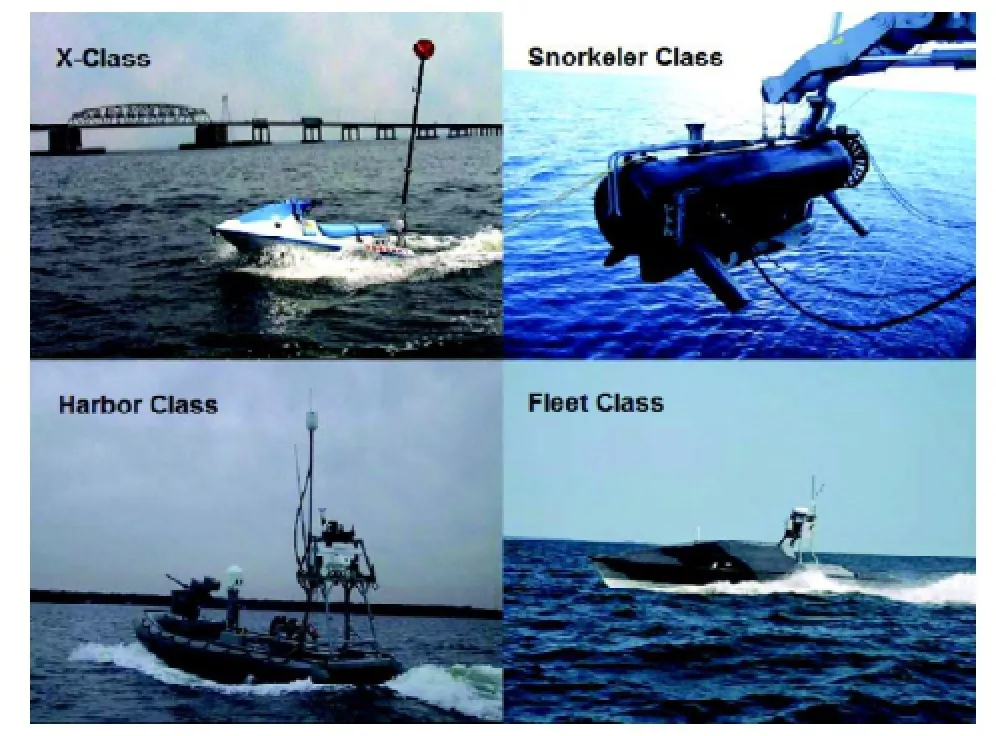
圖3 無人艇的4個級別[8]
除國防軍事上的應用外,無人艇在民用領域發揮的作用也越來越大。2000年美國MIT的無人艇研究小組針對自主海岸勘探系統設計出“Auto Cat”號雙體無人艇,可方便地部署并進行勘測作業。[18]2003年,雅馬哈公司研制的“Kan-Chan”號無人艇可用于監控海洋和大氣的化學和物理參數,具有很長的續航能力;[19]2004年英國普利茅斯大學MIDAS科研小組研發的“Springer”號無人艇可用于內河、水庫和沿海等淺水水域污染物追蹤、環境和航道信息測量等;[20]2005年意大利研發的雙體“Charlie”號無人艇可對南極洲海洋表層進行取樣,收集大氣海洋界面數據;[21,22]2008年,國內新光公司研發的“天象1號”無人艇在奧帆賽期間作為氣象應急裝備提供氣象保障服務;[23]云洲智能公司將無人船運用到環境監測領域,進行在線水質污染和核污染監測。[24]2013年我國研發的“海巡166號”無人艇(見圖4)采用玻璃鋼全封閉結構,選用柴油機為動力噴水推進,具有良好的機動性、抗沉性和抗風浪能力。[25]2014年上海大學研制的“精海”系列無人艇(見圖5)配備北斗導航系統,可實現自主定位、航跡自主跟蹤、航跡線遠程動態設定、障礙物自主避碰等技術。[26]
這一時期的無人艇在技術上有了很大的提高,在軍事和民用及科研中大放異彩,凸顯出半自主和全自主性的發展趨勢;大多采用模塊化設計,注重功能多樣性,從單一的掃雷和靶船到反潛、港口警戒、后勤保障等綜合功能。同時,其動力系統從傳統的汽油或者柴油發動機推進系統開始轉向電力推進、利用太陽能、風能等新能源動力系統,極大提高了續航能力。

圖4 “海巡166”號無人艇
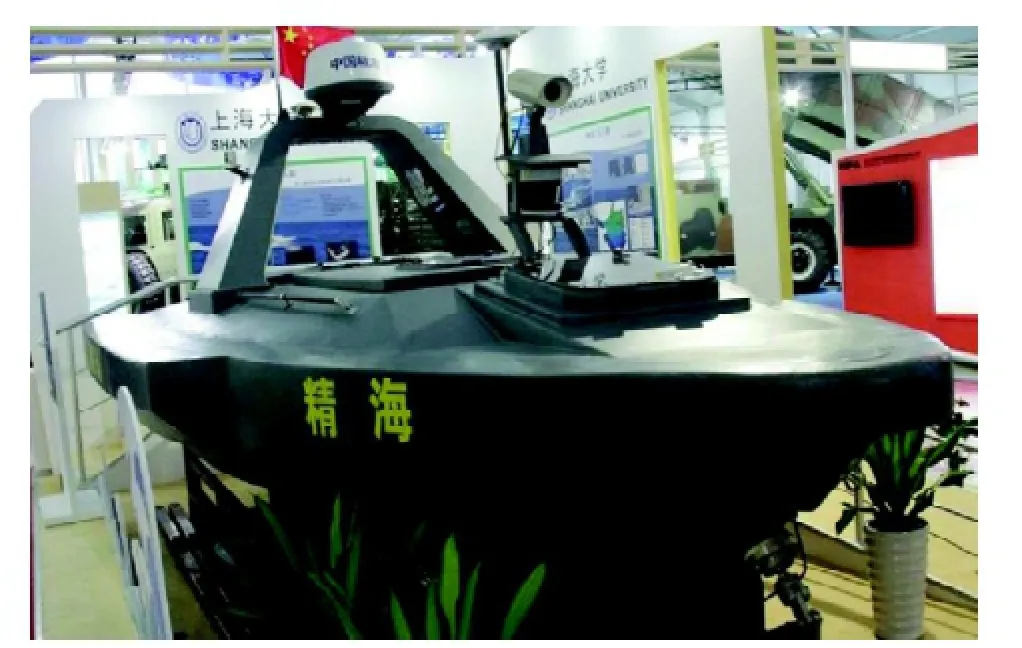
圖5 “精海”號無人艇
3. 在研無人船艇
無人船艇技術在軍事和民用領域已具備相當高的水平。隨著無人駕駛技術的快速發展及應用領域的不斷擴大,無人駕駛船舶正朝著商業化、大型化發展,規模更大、復雜度和安全要求更高的無人駕駛遠洋貨船的研制越來越成為可能。[27]作為全球最大的發動機制造商和船舶設備供應商之一,英國羅爾斯·羅伊斯公司確信,無人駕駛船舶是未來船舶的發展目標和方向,終有一天會取代人工駕駛船舶。2014年3月,一艘2 200 m3的無人駕駛液化天然氣駁船獲得美國船級社批準建造,將用于美國沿海水域船對船的LNG轉運或LNG散裝運輸。
2012年9月,由Fraunhofer CML公司、MARINTEK公司、Chalmers大學等8家研究機構共同合作的“MUNIN”(Maritime Unmanned Navigatio through Intelligence in Networks)項目首次以無人散貨輪為對象開展大型無人船的研究。[28]擬設計的船舶(見圖6)通過雷達、AIS和紅外傳感器等監測周圍環境,與此同時,所有的監控參數都會被實時地傳輸到陸地控制中心。MUNIN項目實現效果如圖6所示。
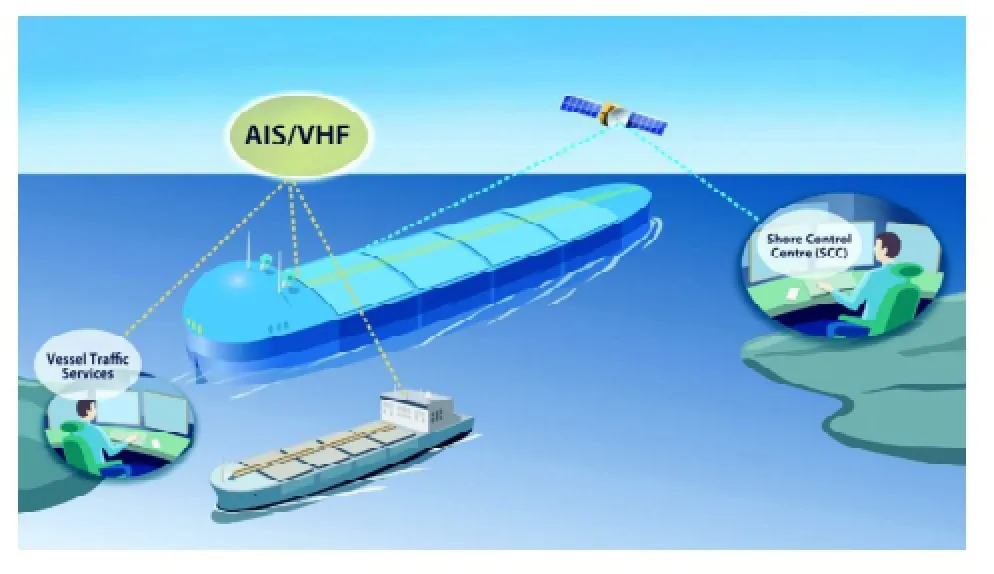
圖6 “MUNIN”無人船示意圖
二、無人船艇中的關鍵技術
無人駕駛船舶涵蓋的技術領域非常廣泛,除了傳統船舶技術,還涉及多傳感器智能監控系統、自動避碰系統、高可靠高冗余數據傳輸系統、機電系統自動故障檢測系統、自動導航系統、電子海圖系統、智能機器人系統等,甚至還涉及現在最熱門的物聯網和大數據等技術。無人船艇必須能夠自主進行環境探測、目標識別、自主避障、路徑自主規劃等。[27]
2013年12月美國軍方發布的《無人系統路線圖》對無人艇近期(未來5年)、中期(未來10年)、遠期(未來25年)的技術發展重點作了細致的說明:無人水面艇近期的技術發展重點將圍繞增強型動力系統、通信系統和傳感器系統等方面,近期的能力需求是提高在本地受控區域執行特定任務的自主性并提高聯網能力;中期將擴展行動范圍并增加任務類型;中遠期則將重點開發高效自主系統、障礙規避算法以及安全架構等;遠期則可在全球自主執行任務。同時還指出,為將無人系統潛能最大化,未來各類無人系統必須實現無縫互操作能力。[29]
綜合國內外研究現狀,目前無人船艇研究涉及關鍵技術主要有以下幾個方面:
1. 航線自動生成與路徑規劃技術
靜態的航線自動生成與路徑規劃技術大致可分為兩類:一類是基于電子海圖的航線自動生成與路徑規劃技術,通過從電子海圖中提取水深、障礙物等信息劃分可航區域和不可航區域,然后在可航區域中采用智能搜索算法,如Dijkstra算法、A*算法等尋求最短路徑,該類算法已有較多研究,如文獻[30-34];但可航區域的最短路徑并不一定是實際可行的航線,例如,規劃的最短路徑可能在IMO推薦航道中逆向行駛。為了解決這一問題,催生了另一類方法——基于軌跡分析的航線自動生成與路徑規劃技術,該類方法以船舶歷史軌跡為基礎,通過軌跡壓縮、軌跡聚類等提取實際可航路徑。[35,36]除靜態航線自動生成與路徑規劃技術外,還需解決基于動態環境感知的局部航線自動規劃問題。
2. 通信技術
無人船艇的通信技術主要涉及無線電通信、光學通信、水聲通信3個方面,[37]通信對象主要有無人船艇與母船之間、無人船艇之間,通信的內容主要有母船對無人船艇的指令信息、無人船艇實時回傳的運動狀態信息以及視頻信息等,通信媒介在近距離可依靠甚高頻通信,遠距離可依靠衛星通信。在無人船艇的通信中重點解決超高頻擴頻通信與衛星通信信號的海上傳輸抗衰耗技術、抗多普勒頻移技術和抗多種干擾技術問題。[7]
3. 自主決策與避障技術
為降低無人船艇對遠程操控人員的依賴,同時擴展多無人船艇協同作戰,需要無人船艇具有較高的自主決策和智能避障能力,以確保無人船艇可以獨立地執行中長期遠程探測、信息搜集等任務。自主決策與避障技術是無人船艇實現高智能化和全自主型的關鍵一步,目前已有較多科研機構對船舶智能避碰技術進行了廣泛而深入的研究,文獻[38]提出一種基于“擬人”策略的船舶智能避碰決策與控制系統,如圖7所示。
4. 水面物標探測與目標自動識別技術
水面物標探測與目標自動識別技術是實現船舶自主決策與自動避障技術的重要基礎。由于無人船艇形體較小,受波浪等因素影響較大,六自由度運動較為劇烈,因此水面物標探測與目標自動識別技術首先要解決視頻穩像問題和圖像質量增強與平滑問題,其次要解決適應水天線和水岸線條件的水界線檢測技術、低信噪比和動態背景條件下的目標檢測技術以及基于多源數據關聯和融合的水面目標跟蹤技術。文獻[39]提出了一種基于光視覺的水面圖像處理技術,并將經典的跟蹤方法Mean-Shift搜索模型和Kalman濾波預測模型用于水面圖像中目標位置信息跟蹤,融合兩者自身的優勢,改善了跟蹤速度,降低了目標尺度變化的影響。
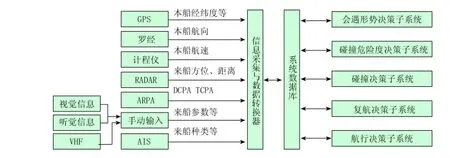
圖7 船舶智能避碰決策與控制系統[38]
5. 其他
2007年美國海軍發布的《無人艇主計劃》為未來無人船艇的發展規劃了相關的技術、投資及進程。《無人艇主計劃》把無人艇涉及的技術分為兩類:技術不成熟類,如自主性技術、避碰技術、避免威脅技術、目標自動識別技術、子任務自動部署和恢復技術;技術成熟但應用不成熟類,如常規控制技術、武器配置技術、艇體的釋放和回收技術。文獻[29]對無人艇的武器發射控制技術、布放回收技術進行了研究,文獻[5,18]對無人艇的操縱性和運動控制進行了研究,文獻[40,41]對無人艇的穩性與浮態性能進行了研究。
三、無人船艇的應用前景
無論在軍事上還是民用領域,無人船艇都已有嘗試性應用并取得了一定成功。未來,無人船艇的應用領域將越來越廣泛,逐步扮演更加重要的角色。
1. 軍事領域
隨著無人機、無人船、無人潛艇逐漸在戰場上顯示出越來越大的威力,無人化戰爭的發展已經呈現出相對清晰的藍圖,它們在未來海洋國土安全、海洋開發方面將發揮越來越大的作用。[7]近年來,無人船艇廣泛用于執行多種戰爭和非戰爭軍事任務,替代人員執行危險或耗時耗力的任務,在港口防護及艦船兵力保護、海上偵察監視、反潛作戰、反水雷戰、后勤補給等方面發揮著重要作用,提高作戰效能的同時也降低了作戰人員的傷亡。目前,世界多國海軍的無人艇已不斷編入作戰序列。[37]隨著技術的進步和無人船艇智能化水平的提高,無人船艇在未來作戰中將發揮越來越重要的作用,成為戰斗力的“倍增器”。[15]
2. 海事巡航監管
2011年通過的《國際防止船舶造成污染公約附則VI——防止船舶造成空氣污染規則》(《MARPOL附則VI》)規定了全球范圍內污染物最大排放量標準,同時對指定海域實行更為嚴格的標準。丹麥最新研制的無人機可通過觀測船舶的煙柱監測污染物的含量。基于無人機的監測優勢,2012年天津海事局投資300萬元租用無人機,定時定點對所轄海域進行監視監控,達到對某些船舶非法排放殘油污染海域的震懾作用。
鑒于無人機在海事巡航監管方面應用的巨大成功,無人艇同樣可以通過搭載攝像機、雷達、污染物探測儀等設備進行海事巡航和監管,這將改變以往主要依靠船舶巡航和直升機航空監測的局面,不僅成本低、反饋信息及時,而且能在夜間和惡劣天氣下長時間執行監測任務。
3. 海事搜尋與救助
以馬航MH370空難為例,海難搜救目標往往范圍廣、距離遠,單獨依靠大型救援船完成大面積區域的搜尋任務需要花費較長的時間且成本較高,幾乎很難在事發2 h黃金救援時間內找到現場。無人船艇可以快速、高效、低成本地以集群方式完成大范圍的搜尋與救助任務。若用飛機空投一批裝載攝像機等搜救探測器和救援物資的無人船進行聯合作業,則可立即實現大面積拉網式搜索,一旦發現目標,其他船可以迅速靠近救援。[42]
4. 海洋數據測量與監測
業內預測,無人船艇在水質監測、水下測繪等十幾個方面將有數百億美元市場。[43]我國至今未能全面普查南海海域地形地貌,其中一個重要的原因就是工作量太大。掃海通常以間隔5 m為一個測量點,探明這些水域的測量點將是一個天文數字。無人測繪船可通過搭載自主測繪儀和GPS自動作業,目前,我國這種無人測繪船精度可達到幾十厘米,航行的里程達到1 000 km。
我國近十多年一直在發展在線監測技術,在水面放置浮標,或者在湖邊安裝設備,通過管道抽取水樣。但這種技術的建設成本比較高,而且監測位置是固定的。用無人船艇進行在線監測就容易得多。基于這種移動在線監測,可以實現很多過去實現不了的功能,比如把一個湖面地毯式監測一遍之后就可以拿到水質參數分布圖,對于污染的分布、擴散情況一目了然,特別是對現在我國各大湖水藻爆發的預警和防治提出了新的辦法和思路。[24]
5. 氣象保障服務
新光集團研制的無人駕駛海上探測船“天象一號”曾為北京奧運會的青島奧帆賽場提供氣象保障服務。“天象一號”無人艇總長6.70 m,寬度2.45 m,總高3.50 m,重2.30 t,船體由玻璃鋼和碳纖維制成,搭載了智能駕駛、雷達搜索、衛星應用、圖像處理與傳輸等系統。在奧帆賽期間,無人船不僅進行了風速、風向、氣溫、濕度、水溫、浪高、海水鹽度等測量,而且還能完成浮標無法做到的能見度的測量。[44]“天象一號”探測船有人工遙控和自動駕駛兩種駕駛方式,如途中遇到障礙物,可通過目標搜索識別系統和處理系統進行避讓航行,且具有自穩定功能,可滿足在高海況下工作。該船配備可靠的動力系統,航程可達數百千米,一次航行可在海面作業20天左右,填補了我國海洋氣象動態探測空白,在應對海洋突發事件和監測海洋、大型湖泊等的環境及災害預警等方面具有重要意義。[16]
四、無人船艇的發展趨勢
綜合國內外研究現狀,認為無人船艇的發展將呈現以下5個趨勢:
1. 結構模塊化
無人船艇采用模塊化的結構設計,可在基本型無人船艇的基礎上裝配多種“即插即用”型任務模塊。同時,通用化、標準化的平臺、技術、組件、接口可有效降低無人水面艇的研制、使用風險和成本,簡化后勤維修的難度,同時增強其與其他平臺之間相互協調的能力。模塊化設計和開放式體系結構增強了功能的多樣性,同時加快了研發進度并且有效降低研發成本。無人水面艇的這個設計開發特點在未來也將一直保持。[15]結構模塊化時要特別注意保證系統性能的高可靠性,使無人船艇在完成要求的任務下能安全回收。
2. 功能智能化
目前各國正在服役的無人船艇大都屬于半自主型,要實現全自主型的無人船艇,必須提升無人船艇的自適應水平和自主決策能力,應對惡劣海況的防搖晃能力也要強,提高各功能模塊的智能化水平。高度智能化的無人船艇可減少對遠程操控人員的依賴,降低對通信帶寬的要求,同時提升超視距離的執行任務能力。無人船艇必將朝著全自主型的方向發展。
3. 體系網絡化
無人船艇的體系網絡化一方面要實現無人船艇與母船、無人船艇之間的集成網絡控制,提升無人船艇的協同作戰、執行任務的能力;另一方面,要實現無人作戰系統的集成網絡化。作為未來戰爭中完成信息對抗、特殊作戰使命的重要手段,早在2001年,美國海軍在瀕海戰斗艦作戰系統中就提出了利用無人艇、無人潛艇和無人機共同構成海軍無人作戰體系,完成諸如情報收集、反潛、反水雷、偵查與探測、精確打擊等作戰任務。[4]
4. 應用廣泛化
無人船艇在軍事領域已得到廣泛應用,并且在轉變軍事結構的過程中發揮了重要作用。在軍事上,無人船艇已可以執行掃雷、反潛作戰、電子戰爭、支持特種作戰等軍事任務。近年來,無人船艇在民事上也有一些嘗試性應用,例如,應用無人船艇進行氣象監測。不久的將來,無人船艇可應用到大面積的海洋測繪和水質監測、大范圍搜尋與救助中,在提升覆蓋能力的同時降低勞動強度、減少作業時間,應用也逐漸由小型無人船艇向大型無人船艇過渡。
5. 裝備國產化
在無人船艇的研究方面,美國和以色列走在了世界前列。如美國的“斯巴達偵察兵”已經部署到“葛底斯堡”號巡洋艦上,并參加了阿拉伯灣地區的“持久自由行動”和“伊拉克自由行動”等作戰任務。以色列的“保護者”在2003年就已經向以色列國防軍交付,已在本國海軍和新加坡海軍中服役。歐盟自2012年9月1日起投資670萬歐元開展為期3年的名為“MUNIN”的無人貨船駕駛系統研究,探索基于自主航行加岸基監控模式的無人船舶駕駛。相比于世界先進水平,我國無人船艇的研究尚處在落后狀態,建議我國加強無人船艇的研究,在未來無人駕駛領域掌握主動地位。
五、結語
本文對無人船艇的基本概念、發展歷程、系統構成及基本特點、研究中涉及的關鍵技術、應用前景和發展趨勢等問題進行了綜述。鑒于無人船艇在應用方面的廣闊前景以及在輕量化、能源消耗等方面展現出的巨大優勢,各國都致力于無人船艇的研究,目前正處于飛速發展的關鍵階段。特別是隨著通信技術、人工智能等新技術、新理念的迅速發展,無人船艇的研究有了科技支撐,在未來,無人船艇有可能帶來航運業的革命,改變航運業的面貌。誰站在技術的前沿,誰就能成為人類夢想的實現者,成為相關巨大市場的孕育者和占有者。在無人船艇的研究方面,我國與世界先進水平還存在較大差距,應該借鑒美國、以色列等國家的經驗,制訂專門的無人船艇發展規劃,積極開展無人船艇各項關鍵技術的研究,推進無人船艇的實用化進程。
[1]JAMES C.Autonomous mission planning and execution for unmanned surface vehicles in compliance with the marine rules of the road[M].Washington:University of Washington,2007.
[2]CORFIELD S J,YOUNG J M.Unmanned surface vehicles-gam changing technology for naval operations[C].15 in Advances i Unmanned Marine Vehicles,Institution of Electrical Engineers 2006:311-328.
[3]VEERS J,BERTRAM V.Development of the USV multi-missio surface vehicle III[C].5th International Conference on Compute Applications and Information Technology in the Maritime Industries 2006.
[4]李家良.水面無人艇發展與應用[J].火力與指揮控制,201 (6):203-207.
[5]吳恭興.水面智能高速無人艇的控制與仿真[D].哈爾濱:哈爾濱工程大學,2008.
[6]特斯拉:被遺忘的偉人[EB/OL].(2014-05-08)[2015-07-15]http://www.robot-china.com/-news/201405/08/10064.html.
[7]徐玉如,蘇玉民,龐永杰.海洋空間智能無人運載器技術發展展望[J].中國艦船研究,2006(3):1-4.
[8]Department of the Navy,US.The navy Unmanned Surface Vehicl (USV) master plan[R].Navy,US,2007.
[9] 陶雯.國外無人水面艇發展研究[R].中國電子科技集團公司第三十六研究所,2010.
[10] WIKIPEDIA.Unmanned surface vehicle[EB/OL].(2015-06 27)[2015-07-15].https://en.wikipedia.org/wiki/Unmanned surface_vehicle.
[11]BERTRAM V.Unmanned surface vehicles-a survey[R]Copenhagen,Denmark,2008.
[12] NAVALDRONES.Spartan Scout USV[EB/OL].(2014-05 20)[2015-02-25].http://www. navaldrones.com/Spartan-Scout.html
[13] CAMBELL S,NAEEM W,IRWING W W.A review on improvin the autonomy of unmanned surface vehicles through intelligen collision avoidance maneuvers[J].Annual Reviews in Control,201 (2):267-283.
[14]YAN R,PANG S,SUN H,et al.Development and missions o unmanned surface vehicle[J].Journal of Marine Science an Application,2010(4):451-457.
[15]萬接喜.外軍無人水面艇發展現狀與趨勢[J].國防科技2014(5):91-96.
[16]柳晨光,初秀民,吳青,等.USV發展現狀及展望[J].中國造船2014(4):194-205.
[17]西陸中國軍事.美軍幽靈無人艇X-2號不再是傳說[EB/OL](2 0 1 1-0 8-1 5)[2 0 15-07-15].h ttp://w w w.x i lu com/2011/0815/news_606_182418.html.
[18]廖煜雷.無人艇的非線性運動控制方法研究[D].哈爾濱:哈爾濱工程大學,2012.
[19]孔慶福,吳家明,賈野,等.艦船噴水推進技術研究[J].艦船科學技術,2004(3):28-30.
[20]Marine and industrial dynamic analysis research group(MIDAS)Springer:Unmanned surface vehicle[EB/OL].(2015-07-15)[2015-07-15].http://www.tech.plymouth.ac.uk/sme/springerusv/Springer. html.
[21]CACCIA M,BIBULL M,BONO R,et al.Charlie,A test bed for USV research[C].8th IFAC International Conference on Maneuvering and Control of Marine Craft, Brazil,16-18 September 2009.
[22]CACCIA M.Basic navigation,guidance and control of an unmanned surface vehicle[J].Autonomous Robots,2008(4):349-365.
[23]船艇[J].軍民兩用技術與產品,2008(1):16-18.
[24]及軼嶸.云洲智能:“萬能”無人船[J].創業邦,2014(8):40-41.
[25]船艇[J].軍民兩用技術與產品,2013(1):23-25.
[26]環球網.國產無人艇配北斗導航[EB/OL].(2014-11-11)[2015-07-15].http://mil.huanqiu.com/observation/2014-11/-5198179.html.
[27]李琴.無人駕駛船舶:來日可期[N].中國船舶報,2014-08-22(007).
[28]PORATHE T,BURMEISTER HC,RODSETH J.Maritime unmanned navigation through intelligence in networks:The MUNIN project[C]//12th International Conference on Computer and IT Applications in the Maritime Industries, COMPIT'13,Cortona 15-17 April 2013.2013:177-183.
[29]宋磊.國外海軍無人水面艇發展及關鍵技術[J].軍事史林,2014(9):58-60.
[30]張玉奎.水面無人艇路徑規劃技術研究[D].哈爾濱:哈爾濱工程大學,2008.
[31]饒森.水面無人艇的全局路徑規劃技術研究[D].哈爾濱:哈爾濱工程大學,2007.
[32]莊佳園,萬磊,廖煜雷,等.基于電子海圖的水面無人艇全局路徑規劃研究[J].計算機科學,2011(9):211-214,21.
[33]CHANG K Y,JAN G E,PARBERRY I.A method for searching optimal routes with collision avoidance on raster charts[J].Journal of Navigation,2003,56:371-384.
[34]SZLAPCZYNSKI R.A new method of ship routing on raster grids,with turn penalties and collision avoidance[J].Journal of Navigation,2006(1):27-42.
[35]張樹凱,楊家軒,蔡垚,等.基于AIS航跡和Douglas-Peucker算法的航線自動生成方法研究[J].重慶交通大學學報:自然科學版,2014(6):79-82,117.
[36]張樹凱,劉正江,張顯庫,等.基于Douglas-Peucker算法的船舶AIS航跡數據壓縮[J].哈爾濱工程大學學報,2015(5):1-5.
[37]李大光,姜燦.無人艇:未來海上的新銳武器[N].解放軍報,2014-02-12(008).
[38]吳兆麟,劉德新,賈傳熒.船舶智能避碰決策與控制系統總體結構[J].大連海事大學學報,2004(2):1-3,11.
[39]曾文靜.基于光視覺的無人艇水面目標檢測與跟蹤研究[D].哈爾濱:哈爾濱工程大學,2013.
[40] 劉維華.無人艇穩性及浮態恢復性能研究[D].哈爾濱:哈爾濱工程大學,2011.
[41]于海軍.基于抗傾覆性與浮態恢復性無人艇仿真研究[D].哈爾濱:哈爾濱工程大學,2012.
[42]蘇力,張東明,王更輝,等.“中國技術”突圍世界一流無人船研發[N].南方日報,2015-02-14(004).
[43]黃銳.無人交通崛起 無人船要火[N].東莞日報,2015-05-25(B07).
[44]操秀英.無人船怎么監測天氣[N].科技日報,2008-09-05 (005).

10.16176/j.cnki.21-1284.2015.09.008
國家自然科學基金資助項目(51309041);中央高校基本科研業務費基金資助項目(2015YB03)