基于ADAMS的Mecanum八輪全向移動平臺運動學分析與仿真
2015-09-13 11:40:26邢雯麗朱建江
制造業自動化 2015年15期
關鍵詞:方向
邢雯麗,朱建江,2
(1.中國礦業大學 機電工程學院,徐州 221116;2.常熟理工學院 電氣與自動化工程學院,常熟 215500)
0 引言
全向移動平臺是指在平面上具有前后、左右和中心旋轉3個自由度,在不改變自身位姿的情況下可以沿任意方向進行移動的運載機構。全向移動平臺的靈活機動性和精確定位,使其在船舶、倉庫、航空等領域廣泛應用。目前全向移動機構的應用研究主要集中在四個Mecanum輪全向移動平臺[1~3]方面,然而隨著航空航天器、石化、電力部組件和配套產品向更大尺寸及重量[4~6]發展,四輪全向移動平臺已逐漸不能滿足承受重載的使用要求。重載情況下,四輪全向移動平臺需要的驅動扭矩大,且采用蓄電池直流供電,四個Mecanum輪驅動模式時,需要采用高壓供電、大功率電機,因高壓供電需要的電池組過多,導致整體尺寸過大且不經濟。若采用低壓供電(一般為48V或72V),驅動電機功率無法選的較大,否則電流過大控制電路中的功率器件不能滿足要求。若選擇較小功率電機、大減速比減速機來滿足大扭矩,則導致全向平臺運動速度過低,也不能滿足使用要求。因此,對于重載全向移動平臺采用多個全向輪(Mecanum輪)協同驅動技術是合理的選擇。
本文提出一種由八個Mecanum輪協同驅動控制的全向移動平臺,建立其運動學方程,然后運用ADAMS完成相應的運動學建模和仿真分析,得到平臺沿不同方向的運動特性。
1 建立運動學數學模型
八個Mecanum輪協同驅動控制技術是全向移動平臺實現重載的關鍵技術,其運動學方程的建立是實現其驅動控制的前提。
1.1 建立運動學二維模型
如圖1所示,Oxy是與全向移動平臺幾何中心重合且與機身固聯的直角坐標系,圖中標號1~8的方框為八個全向輪,方框中斜線表示各輪與地面接觸的小輥子的偏置方向。是與全向輪i輪轂中心重合且與輥子固聯的直角坐標系,Ri為輪中心在平臺坐標系中的位置向量,ω為全向平臺繞自身幾何中心的角速度,L0、L1、L2為輪中心在平臺坐標系中的位置尺寸,D為全向輪直徑。
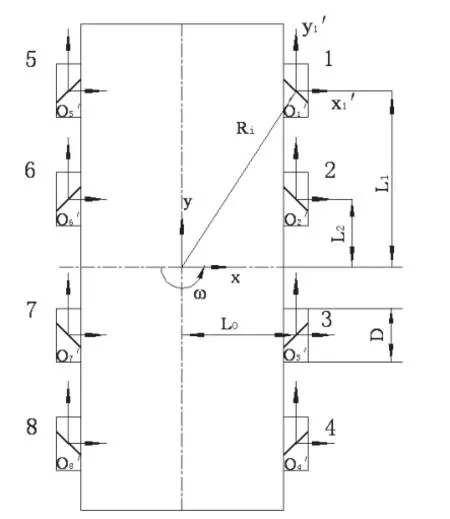
圖1 Mecanum八輪全向移動平臺二維模型
1.2 建立運動學方程
為建立八Mecanum輪全向移動平臺的運動學方程,便于對其進行運動學分析,對全向平臺的運動過程進行以下假設:
1)假設全向平臺、Mecanum輪及地面均為剛體,且平臺在平坦地面上運動,忽略自身結構及地面變形對其運動情況帶來的影響。
2)假設輪子與地面的摩擦力足夠大,輪子不發生打滑現象。
3)忽略全向輪和全向底盤在制造中的誤差,假設 Mecanum輪與地面的接觸點在輪心的正下方。
全向輪i的運動結構原理[7,8]如圖2所示,ri為輪i與地面接觸輥子的中心,si為輥子軸線方向單位向量,si與的夾角為γ, τi為垂直于si方向的單位向量,為輪i 轉過的角度,為輥子轉過的角度。假設輥子與地面接觸點無相對滑動,則點速度可表示為:

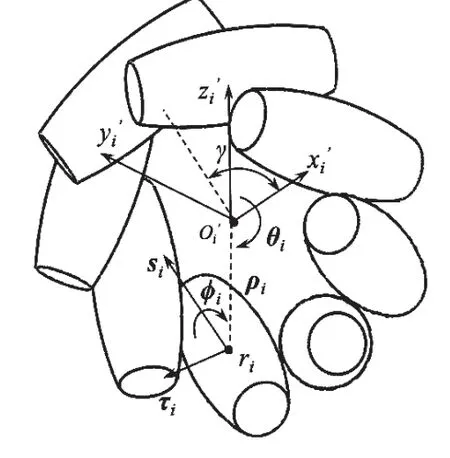
圖2 輪i運動結構原理圖

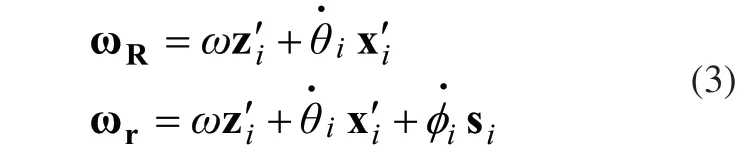
式中,z′i為Oi′zi′方向的單位向量, ωr為輥子轉動角速度,ωR為輪轂轉動角速度,R為全向輪半徑,r為輥子的最大半徑。
而根據全向平臺以及全向輪的運動關系,可以得到:
結合式(1)、式(2)以及式(3)可以得到:

從另一個角度來看,根據圖1所示,點iO′速度在全向平臺中可以表示為:

式中,vo為全向平臺幾何中心速度,E為變換矩陣:
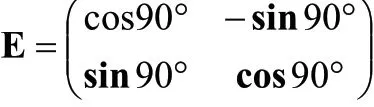
其作用是使Ri逆時針旋轉90°。
由矢量的定義,有:

則將式(4)、式(5)兩邊同時點乘si,聯立后得到:
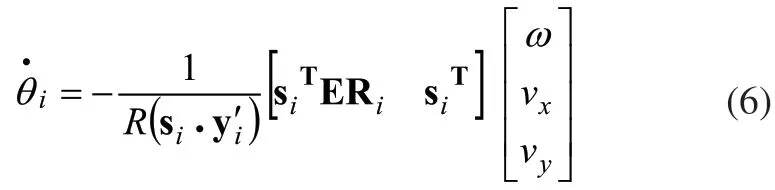
綜合八輪的全向移動平臺,展開后的運動學方程式如下:
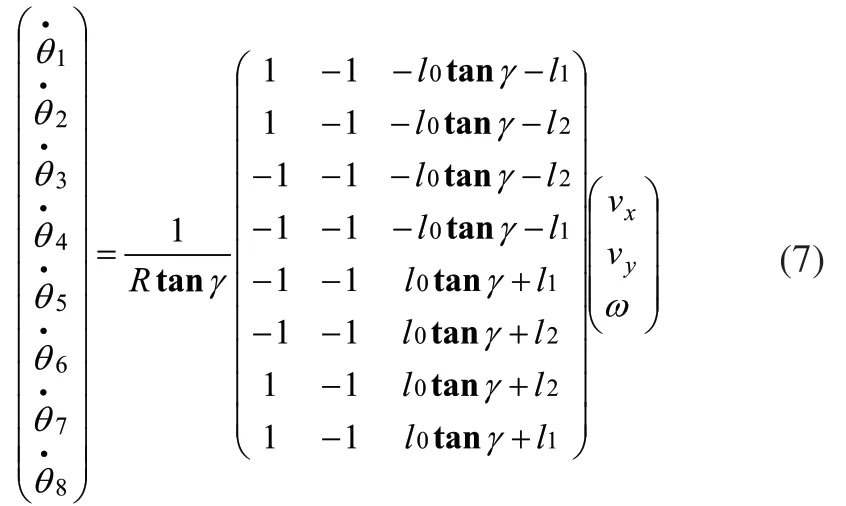
對應兩種輥子安裝角度的全向輪如圖3所示,有si.y'i=cos45°或者si.y'i=cos135°,以此確定相應的γ值。

圖3 兩種輥子安裝形式
則式(7)可簡化為:
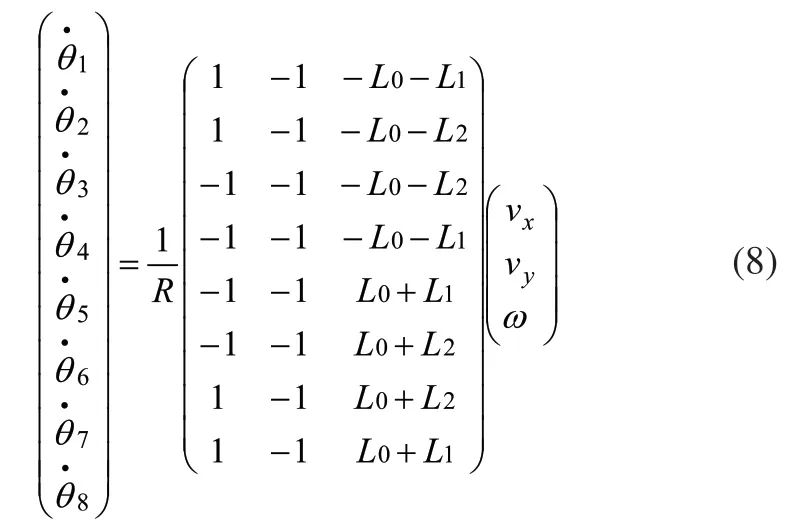
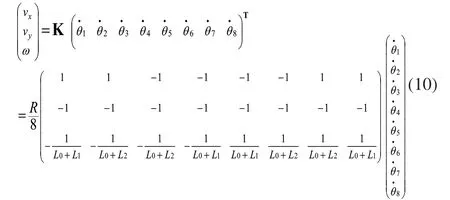
式(8)為平臺的逆運動學方程,設:
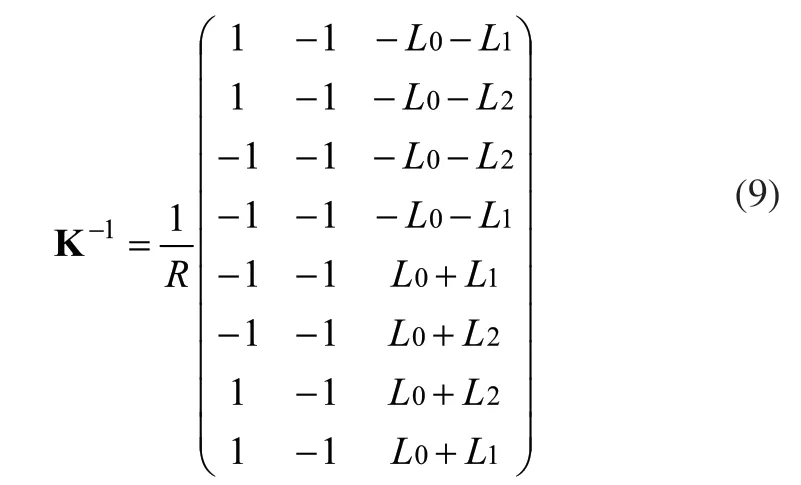
式中,K-1為系統速度的逆雅可比矩陣。rank(K-1)=3,是實現平臺全方位運動必要條件。全向平臺的正運動學方程為:
2 建立仿真模型及參數設置
本文以KUKA公司型號為KoM UTV-2 E375的全向移動平臺結構參數為依據,結合自身載荷特點確定了Mecanum八輪全向移動平臺整體結構參數,其主要參數如表1所示。

表1 Mecanum八輪全向移動平臺參數
利用SolidWorks軟件進行全向移動平臺三維模型的創建,然后將模型導入ADAMS軟件中,再根據全向平臺的約束關系及運動形式添加約束及運動副,完成全向平臺虛擬樣機的建模。建立全向平臺的三維模型時,在滿足全向平臺虛擬樣機仿真結果準確性的前提下,簡化了全向平臺機械結構的細節設計、省略了與其運動無關的部件。
由于對全向平臺的運動學進行仿真時,主要考慮Mecanum八輪系統的運動情況,因此將全向平臺車體部分作為一個整體零部件,省略其中的懸掛結構。而電機及減速機的傳動則由軟件中設置的驅動副取代。圖4為簡化后的全向平臺裝配圖。
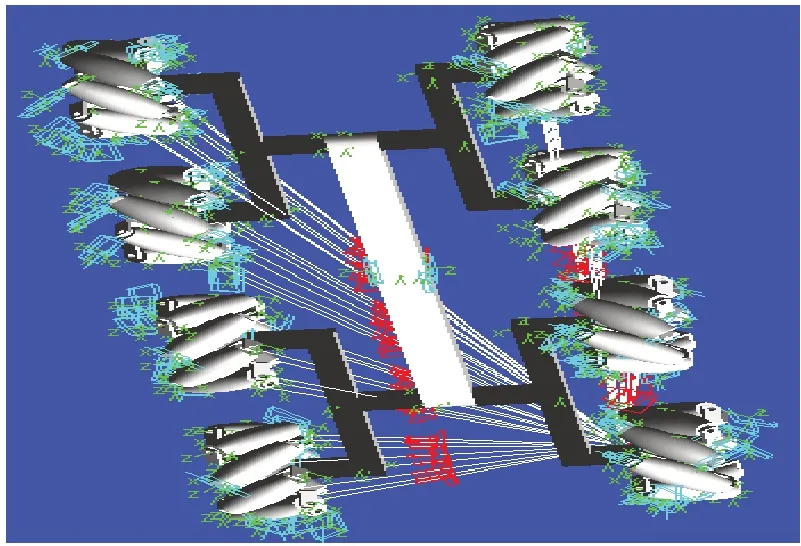
圖4 全向移動平臺簡化三維模型
將建立好的三維模型導入ADAMS中,對軟件進行基本設置,單位選擇為MMKS,設置重力加速度為9.8m/s2,定義各部分材料屬性。然后,定義模型的運動副與約束關系。在車身與輪轂軸線、輥子軸線與輪轂之間添加旋轉副;在輥子與地面之間添加接觸關系,根據全向平臺運動時Mecanum輪各輥子與地面接觸方式的特點,定義輥子與地面為斷續接觸,在ADAMS中采用沖擊函數法(Impact)模擬輥子與地面的接觸,采用庫倫法(Coulomb)模擬輥子與地面的摩擦。根據現有的研究文獻[9~11]及工程實踐,定義函數中各參數值,如表2所示。
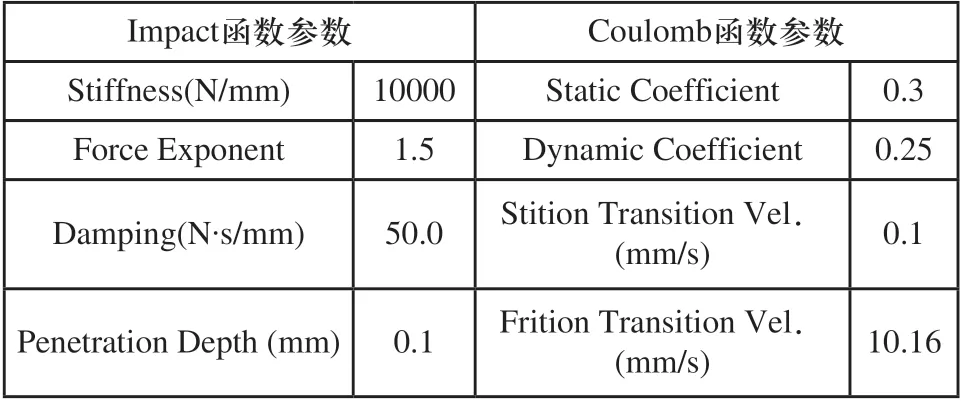
表2 ADAMS接觸函數參數設置
3 仿真結果與分析
3.1 全向平臺+x向運動仿真
對全向平臺沿x正向運動進行仿真,定義平臺移動速度為220mm/s,無y向及轉動速度。根據式(8)全向平臺的運動學方程計算得到八個Mecanum輪的轉速分別如表3所示。在虛擬樣機中對八個Mecanum輪添加對應的旋轉驅動,得到仿真結果如圖5所示。
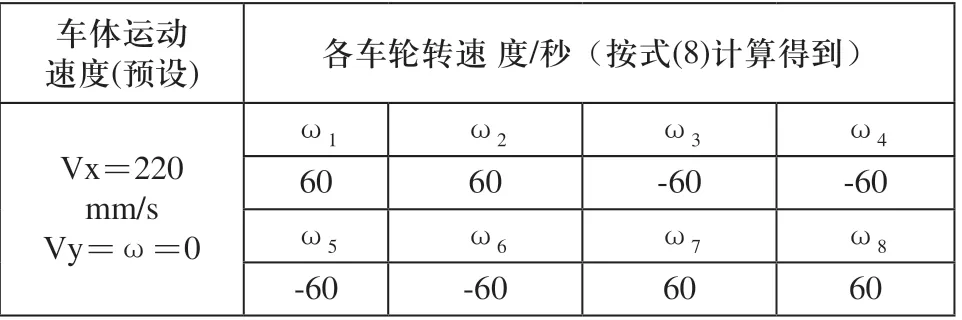
表3 +x方向各輪轉速
圖5所示為全向平臺幾何中心沿x正向的運動速度,可以看出平臺運動速度經過一個上升階段,這是平臺從靜止狀態開始加速的過程,然后達到相對穩定階段,約為220mm/s,但是運動過程中存在一個很小的速度波動。出現這樣速度波動的原因是在Mecanum輪轉動過程中,多個輥子與地面交替接觸使得接觸條件隨之不斷變化。
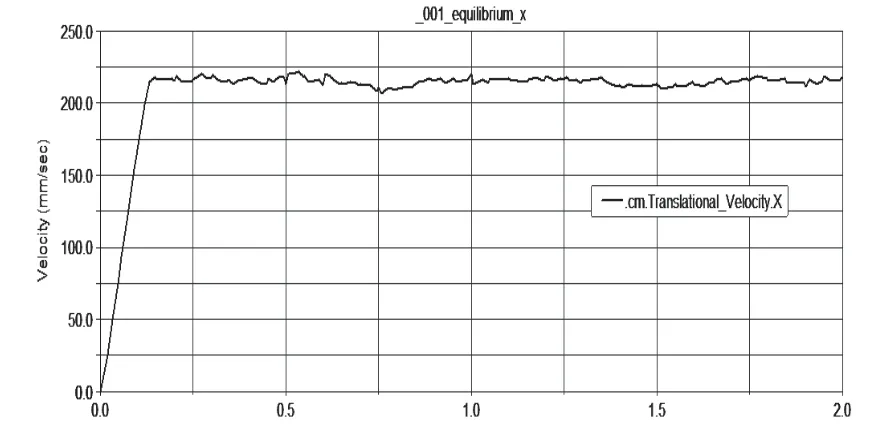
圖5 +x方向運動仿真
3.2 全向平臺沿45度方向運動仿真
對全向平臺沿45度方向運動進行仿真,定義平臺x、y正向移動速度均為110mm/s。根據式(8)全向平臺的運動學方程計算得到八輪的轉速如表4所示。在虛擬樣機中對八個Mecanum輪添加對應的旋轉驅動,得到仿真結果如圖6所示。
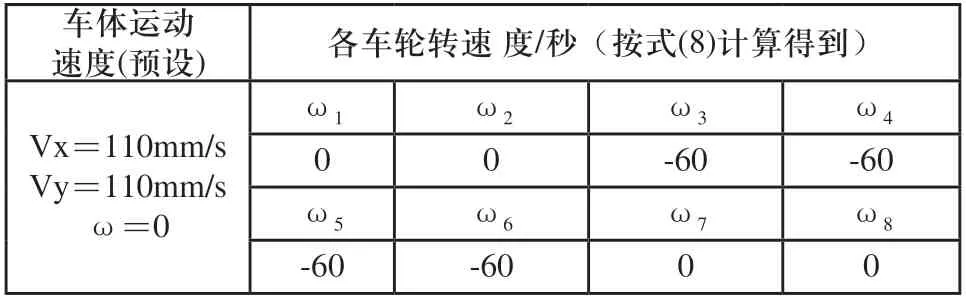
表4 45度方向各輪轉速
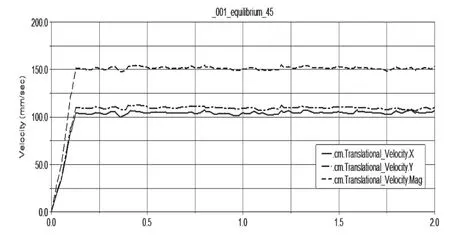
圖6 45度方向運動仿真
圖6所示為全向平臺幾何中心沿45度方向的運動速度,可以看出,平臺x,y向運動速度基本穩定在110mm/s,合成速度經過上升階段達到110×=155.56mm/s,相對穩定后也存在一個很小的速度波動。出現這樣波動的原因是除了沿x向運動造成的波動外,采用橢圓近似曲線制造輥子,使得Mecanum輪的包絡面并不是標準的圓柱面,沿y向運動時速度也會有存在一定的波動,可以看出沿y向的速度波動較x方向平緩一些。
3.3 全向平臺繞自身幾何中心旋轉運動仿真
對全向平臺繞自身幾何中心旋轉運動進行仿真,定義平臺轉動角速度為-21rad/s,無x、y向移動。根據式(8)全向平臺的運動學方程計算得到八輪的轉速分別如表5所示。在虛擬樣機中對八輪添加對應的旋轉驅動,得到仿真結果如圖7所示。
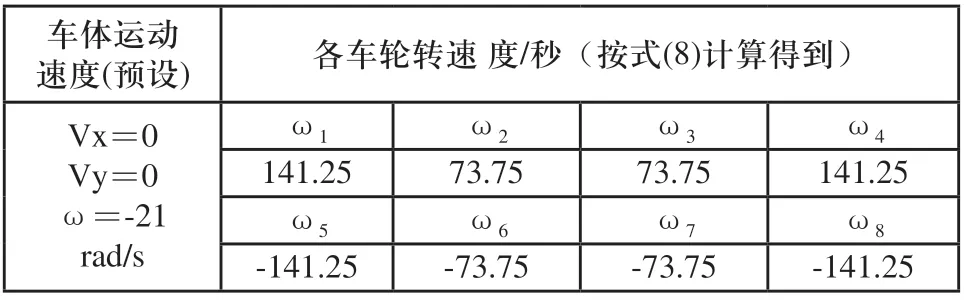
表5 繞自身幾何中心轉動方向各輪轉速
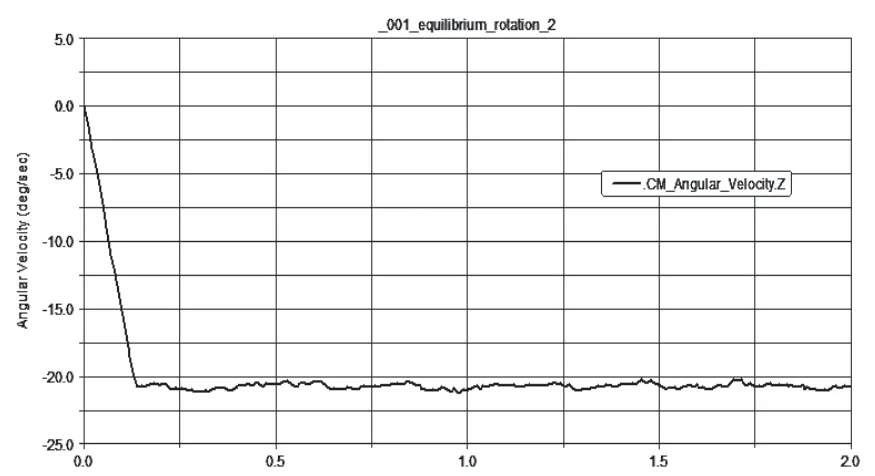
圖7 繞自身幾何中心轉動方向仿真
圖7所示為全向平臺繞自身幾何中心轉動角速度,其角速度值經過下降階段到達相對穩定后存在較為平緩的速度波動,穩定值約為-21rad/s。
3.4 45度方向運動,同時繞自身轉動
對全向平臺沿45度方向運動同時繞自身幾何中心旋轉進行仿真,定義平臺x、y正向移動速度為110mm/s,轉動角速度為-21rad/s。根據式(8)全向平臺的運動學方程計算得到八輪的轉速如表6所示。在虛擬樣機中對八輪添加對應的旋轉驅動,得到仿真結果如圖8所示。

表6 45度方向運動,同時繞自身幾何中心轉動各輪轉速
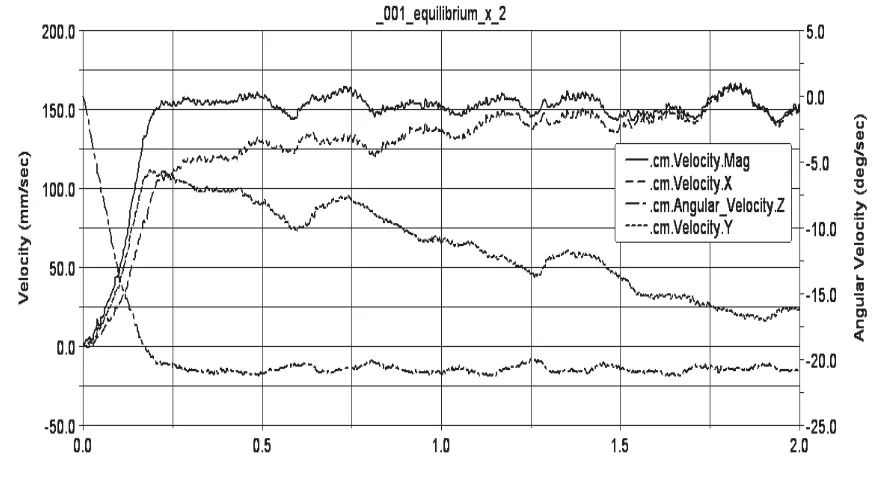
圖8 45度方向運動,同時繞自身幾何中心轉動仿真
圖8所示為全向平臺沿45度方向同時繞自身幾何中心旋轉的運動速度,仿真得到轉動速度約為-21rad/s,x和y方向初始速度為110mm/s,當平臺繞自身轉動一定角度后,平臺的平移速度方向與絕對坐標系不再呈45度夾角,而是在x和y絕對坐標系下的分量值進行變化,但是可以得到平臺的速度合成值不變約為155.56mm/s。
4 結論
1)為適應大型精密產品向更大尺寸及重量發展的趨勢,本文提出了一種由八個Mecanum輪協同驅動控制的全向移動平臺,建立了其運動學模型,推導了其運動學方程。
2)在ADAMS軟件中建立了全向移動平臺的簡化虛擬樣機模型,通過仿真分析,得到了平臺沿+x方向、45度方向、繞自身幾何中心轉動方向以及沿45度同時繞自身轉動方向的運動規律。
3)仿真所得結果與理論計算值基本一致,說明參數設置合理,同時驗證了運動方程的正確性。該運動學方程的建立解決了研發八Mecanum輪全向移動平臺的一個關鍵技術問題,為以后動力學和運動控制的研究奠定了基礎,對重載全向移動平臺的研發具有一定的參考價值和工程意義。
[1] 關利贏,郝鑫,常力欣,等.萬向電動叉車螺旋滾輪輪體設計[J].軍事交通學院學報,2009,11(2):65-68.
[2] 呂偉文.全方位輪移動機構的結構設計[J].機械與電子,2006,(12):63-65.
[3] 石維亮,王興松,賈茜.基于Mecanum輪的全向移動機器人的研制[J].機械工程師,2007,(9):18-21.
[4] 鄒丹,馬向莉.全向輪智能移動平臺前景展望[J].軍民兩用技術與產品,2012,2:56-58.
[5] 許國康.大型飛機自動化裝配技術[J].航空學報,2008,29(3):734-740.
[6] 吳曉峰,趙祉江,柳權.大空間尺寸測量及大部件運輸、跟蹤、定位技術[J].航空制造技術,2009,24:38-41.
[7] 王一治,常德功.Mecanum四輪全方位系統的運動性能分析及結構形式優選[J].機械工程學報,2009,45(5):307-310.
[8] 賈官帥.基于Mecanum輪全方位移動平臺的理論和應用研究[D].杭州:浙江大學,2012:1~56.
[9] 李敏.全向剪叉自行式高空作業平臺的開發[D].南京:南京航空航天大學,2013:1-70.
[10] 李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2006.
[11] 趙武云,劉艷研,吳建民,王芬娥.ADAMS基礎與應用實例教程[M].北京:清華大學出版社,2012.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
