重型變位機翻轉架的受力分析
2015-09-18 05:36:19唐艷華趙永生燕山大學河北省并聯機器人與機電系統實驗室河北秦皇島066004燕山大學先進鍛壓成型技術與科學教育部重點實驗室河北秦皇島066004
重型機械 2015年2期
唐艷華,趙永生(1.燕山大學河北省并聯機器人與機電系統實驗室,河北秦皇島066004; 2.燕山大學先進鍛壓成型技術與科學教育部重點實驗室,河北秦皇島066004)
重型變位機翻轉架的受力分析
唐艷華,趙永生
(1.燕山大學河北省并聯機器人與機電系統實驗室,河北秦皇島066004; 2.燕山大學先進鍛壓成型技術與科學教育部重點實驗室,河北秦皇島066004)
針對重型變位機的實際要求,考慮工件重力影響,對變位機主要部件--翻轉架進行靜力分析,得出絲杠所需提供的軸向力以及翻轉軸處的支座反力。在Matlab軟件中編程計算,得到變位機翻轉過程中翻轉架的受力變化曲線,并分析得出兩個極限位置。在SolidWorks軟件中應用COSMOSWorks對翻轉架受力極限位置進行有限元分析,得到靜力作用下的應力和變形云圖,分析結果對于重型變位機的設計加工有指導作用。
變位機;翻轉架;靜力
0 前言
變位機是將工件回轉并傾斜,使工件置于有利加工位置的變位機械,主要用于機架、機座、機殼、法蘭、封頭等非長形焊件的翻轉變位,也可以在其上從事切割、堆焊、噴涂等作業[1]。
在重型機械切削加工過程中,工件質量大,形狀不規則,且包含個數、位置、尺寸均不相同的待加工孔,需要在變位機上完成裝夾定位[2]。變位機需要通過旋轉或翻轉將工件擺放到合適的加工位置,由于工件在變位機上的裝夾位置并不確定,旋轉、翻轉亦沒有固定的順序,因此變位機承受的載荷并不固定,隨著工件以及工作位置的不同而變化。
1 兩自由度變位機
某公司設計的兩自由度變位機主要參數:工件最大質量60 t,變位機工作臺直徑φ5 000 mm,夾持工件最大直徑φ4 500 mm,工作平臺翻轉角度范圍0~70°,工作平臺自身旋轉角度范圍0~360°。
該變位機具有旋轉和翻轉兩個自由度,其三維實體簡化模型如圖1所示,主要由旋轉工作臺、翻轉架和底座三大部分組成。翻轉機構由兩個液壓馬達同時驅動,通過滑動絲杠帶動絲母在其軸線方向上移動,以實現翻轉架的翻轉運動。翻轉架的上部通過外齒圈交叉滾子轉盤軸承與旋轉工作臺連接,且為旋轉夾緊機構的支座;下部(即腿部)與絲母固連。變位機的翻轉機構主體通過翻轉軸放置在變位機基座上。翻轉架既是變位機旋轉工作臺的基座,又是翻轉機構的主體,其強度和剛度在整個變位機的結構中至關重要。
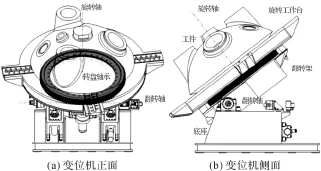
圖1 重型變位機三維實體簡化模型Fig.1 3D simplified model of heavy positioner
2 變位機翻轉架的靜力分析
變位機為低速機械,不計慣性力,對變位機的翻轉架進行靜力分析,翻轉架受力情況如圖2所示。翻轉架受到其自身以及所有翻轉部件(包括工件)的重力G作用,在翻轉軸C處受到支座的反作用力FCx和FCy,絲母B處受到沿著其軸線方向的作用力F。
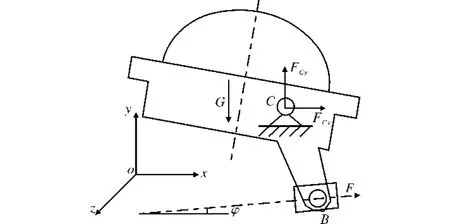
圖2 翻轉架受力分析圖Fig.2 Loads analysis diagram of turnover frame
在給定變位機翻轉角度的情況下,翻轉部件的重心與翻轉軸的相對位置以及產生的繞翻轉軸的扭矩是確定的;由于工件偏心,其重心與翻轉軸的相對位置并不確定,工件重力對翻轉軸產生的扭矩隨著工件重心在工作臺平面上位置的變化而不斷變化。所以力矩M分為由翻轉部件產生的不變扭矩M1和由工件產生的可變扭矩M2兩部分。如圖3所示,s1表示翻轉部件重心位置,s2表示工件重心位置,s1和s2與翻轉軸C的相對位置分別用e1、h1、e2、h2來表示。
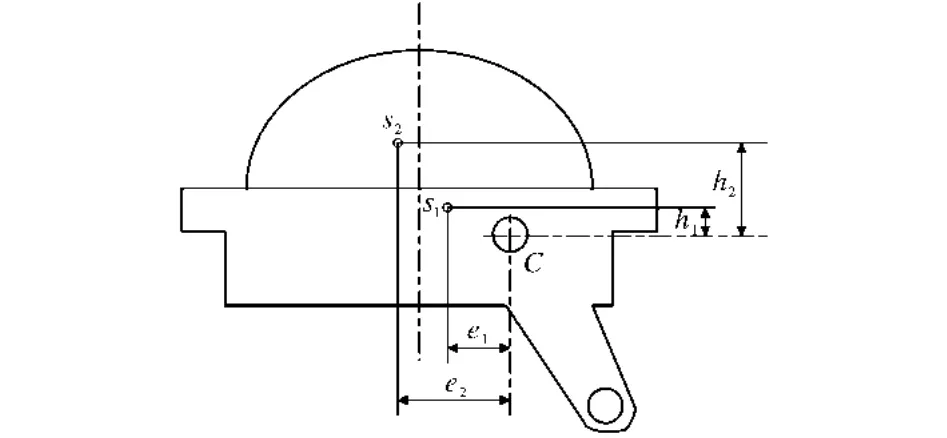
圖3 翻轉部件重心位置圖Fig.3 Gravity centre position of turnover parts
翻轉部件重心位置與高度確定,而工件重心與翻轉軸之間的距離e2隨工件在工作臺上的擺放位置不同而變化。在變位機旋轉軸線所在的與工作臺面平行的平面上建立坐標系xoy,如圖4所示。x軸與翻轉軸平行,工件偏心半徑為e,且旋轉軸線在坐標平面的投影點與翻轉軸的距離用l表示,工件重心s2在工作臺上的位置用表示。工件的任意擺放位置均可以用0°~360°之間的唯一β值表示出來。
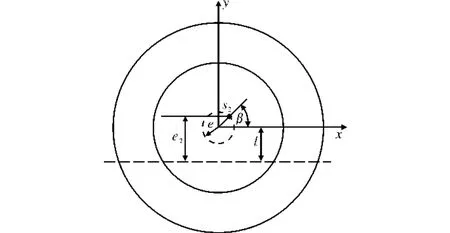
圖4 工件重心位置Fig.4 Gravity centre position ofworkpiece
根據受力平衡條件可以,得出F、FCx、FCy分別為
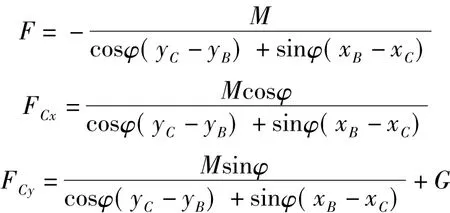
式中,φ為絲杠與水平面的夾角;(xB、yB)為絲母B點的坐標;xC、yC為翻轉軸C點的坐標;M為重力G產生的相對于翻轉軸C的扭矩。
將F、FCx、FCy反向之后,便可以得到絲杠所受軸向力以及翻轉軸的受力情況。
在變位機的任意翻轉角度,翻轉部件的重力產生的繞翻轉軸的扭矩計算公式為
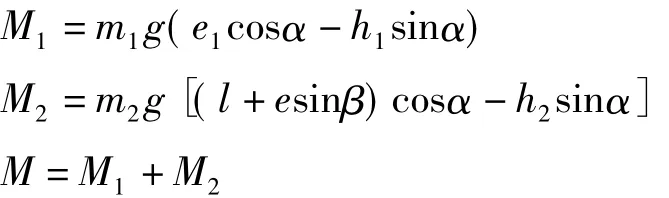
從扭矩計算公式中可以看出,對于給定的翻轉角度α,當β=π/2時,扭矩出現最大值,當β= 3π/2時,扭矩出現最小值。因此,分別考慮工件處于這兩個位置時,絲母軸線方向的作用力F以及翻轉軸處支反力FCx、FCy隨翻轉角度α的變化情況。
3 翻轉機構的靜力分析結果
在Matlab軟件中編程計算,分別得出當β= π/2和β=3π/2時,絲母軸線方向作用力F、翻轉軸處支反力FCx、FCy隨翻轉角度α的變化情況。
(1)當β=π/2時,絲母軸線方向作用力F隨翻轉角度的變化曲線如圖5所示。從圖中可以看出,水平位置時,F為-1.270×106N,絲杠受拉;隨著翻轉角度的增大,絲杠拉力逐漸減小,直至翻轉角度為35.66°時絲杠受力為零;之后,絲杠受壓,且壓力大小隨著翻轉角度的增大而增大,直到翻轉角度為70°時,壓力最大,為1.223×106N。
翻轉軸C 處x 方向支反力FCx隨翻轉角度α變化曲線如圖6所示。從圖中可以看出,水平位置時,FCx的值最大,為1.270×106N;隨著翻轉角度的增大,FCx數值減小,直到為零之后又反向增加,翻轉70°時,FCx的值為1.2228×106N,方向是沿x的負方向。
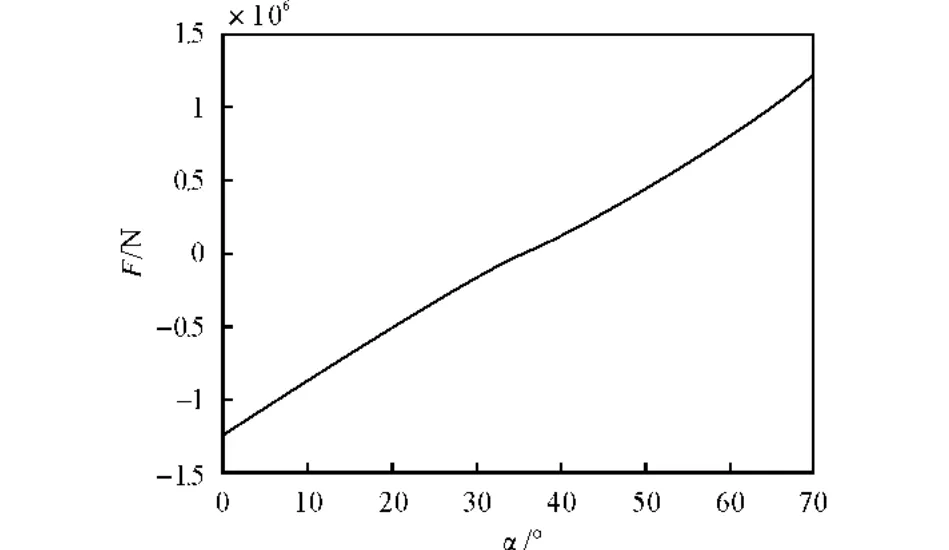
圖5 F-曲線Fig.5 F-αcurve翻轉軸C處x方向支反力FCx隨翻轉角度α

圖6 FCx-α曲線Fig.6 FCx-αcurve
翻轉軸C處y方向支反力FCy隨翻轉角度α變化曲線如圖7所示。從圖中可以看出,FCy的最大值為1.1344×106N,最小值為1.052 4× 106N,相差不多,說明隨著翻轉角度的增加,翻轉軸處y方向的支反力變化不大。
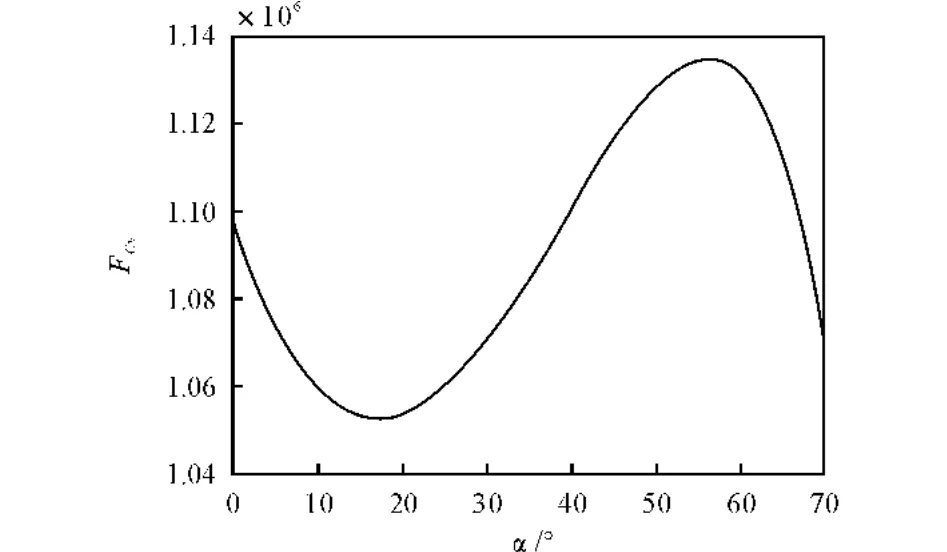
圖7 FCy-α曲線Fig.7 FCy-αcurve
(2)當β=3π/2時,F、FCx、FCy隨翻轉角度α的變化曲線與β=π/2時相比,曲線變化趨勢一致,只是對應于同一翻轉角度時的數值不同,不再給出圖示。具體的比較見表1。

表1 受力分析結果比較Tab.1 Comparison with results of force analysis 106N
對比F、FCx、FCy在β=π/2和β=3π/2兩種情況下的極值大小可以看出,當變位機處于水平位置且β=π/2時,絲杠承受最大拉力,為1.270×106N,此時x正方向的支座反力最大;當變位機翻轉70°且β=3π/2時,絲杠承受最大壓力,為1.231×106N,此時x負方向的支座反力最大;y方向的支座反力的最大值與最小值相差不大,且在兩種情況下更是相差甚微。
綜合上述兩種情況,可以得出變位機受力的兩個極限位置:變位機水平位置且β=π/2,變位機翻轉70°且β=3π/2。本文以變位機水平位置且β=π/2極限位置時對翻轉架進行有限元分析。
4 翻轉架水平位置時有限元分析
有限元分析結果的可信度直接受分析模型、載荷處理、約束條件和實際工程結構力學特性符合程度的影響,建立有限元分析模型時既要如實反映實際結構的重要力學特性,又要盡量采用較少的單元和簡單的單元形態,以保證較高的計算精度及縮小解題規模[3]。
利用SolidWorks軟件建立翻轉架的三維模型,在COSMOSWorks中,建立翻轉架水平位置時的分析模型如圖8所示。翻轉架材料選用普通碳鋼,水平位置時,受到自身重力、工件以及翻轉部件的重力作用,在與絲杠連接的位置受到沿著絲杠軸線方向的作用力635 000 N,為了將絲杠軸線方向的作用力準確地施加到翻轉架模型上,首先建立沿絲杠軸線方向的基準軸,以便加載時準確確定載荷方向。翻轉軸通過軸承坐落在機座上,在翻轉軸與軸承的接觸面上定義鉸鏈約束。

圖8 翻轉架水平位置有限元分析模型Fig.8 FEA model of turnover frame horizontal position
劃分實體網格進行分析之后,利用軟件的后處理功能,輸出翻轉架在水平位置時的應力云圖和位移云圖分別如圖9、10所示。
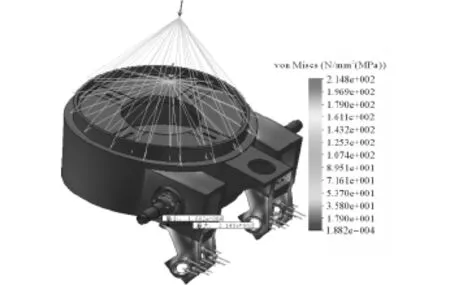
圖9 翻轉架水平位置應力云圖Fig.9 Stress nephogram of turnover frame horizontal position
計算結果應力單位為MPa,位移單位為mm,變形比例為554.4。圖中的Von Mises應力是按第四強度理論計算的第四相當應力,所顯示的URES位移是各點的總位移。
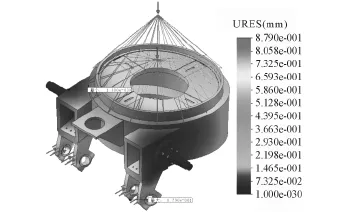
圖10 翻轉架水平位置合位移云圖Fig.10 Displacement nephogram of turnover frame horizontal position
從圖中可以看出,最大應力為214.8 MPa,發生在翻轉架的腿部。最大位移亦發生在翻轉架的腿部,其值為0.879 mm。
同時可以利用COSMOSWorks的后處理功能測得翻轉軸處的支反力,檢測結果見表2。
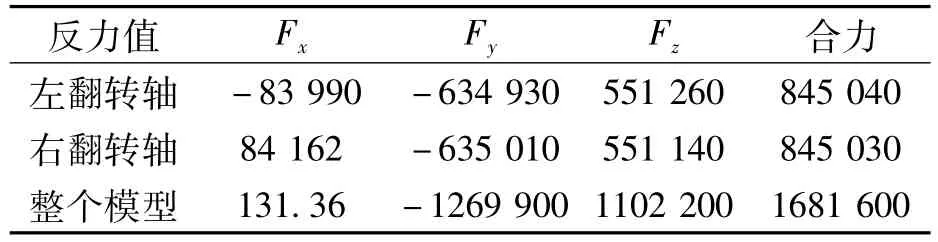
表2 翻轉架水平位置時支反力檢測結果Tab.2 Reaction force of turnover frame horizontal position N
翻轉架翻轉69°時,不僅受到自身重力、工件以及旋轉部件的重力作用、絲杠軸線方向的作用力,還要考慮加工21°孔時的切削力。最終從翻轉架在水平位置和翻轉69°兩種工況下的分析可以看出:翻轉架的應力分布不均勻,應力較大的位置集中分布在翻轉架的腿部,應力最大值出現在翻轉架的腿與翻轉架的連接部位,應力值為214.8 MPa,小于普通碳鋼的屈服強度值220.59 MPa,翻轉架的強度滿足要求;翻轉架變形較大的位置亦發生在翻轉架的腿部,最大位移值為0.879 mm。
5 結論
(1)通過對變位機翻轉架進行靜力分析,得出翻轉架受力極限位置:變位機水平位置且β= π/2;變位機翻轉70°且β=3π/2。
(2)通過對翻轉架受力極限位置進行有限元分析得出:翻轉架的腿部是翻轉架最關鍵的部位,變位機工作過程中受力狀態不是很好,可以選用屈服強度較大的合金鋼來制造翻轉架的腿部,以提高翻轉架的整體強度。還可以從優化翻轉架腿部結構的方面考慮,使翻轉架更加安全可靠。
(3)該研究成果指導的變位機系統的設計開發,目前變位機已成功投入使用。
[1]唐艷華,趙云峰,祁榮先,等.變位機用轉盤軸承的載荷分析與仿真[J].機械設計2011,28(5): 10-14.
[2]Yanhua Tang,Yongsheng Zhao.Mechanism Design of a Two DOF Heavy Positioner and Turns-over Structure[J].Applied Mechanics and Materials,2013,271 (1):1017-1021.
[3]張營杰,劉賡.大型鍛造操作機鉗頭夾持機構受力分析[J].重型機械2013(5):50-56.
[4]李劍鋒,菅迎賓.臥枕式針齒結構的擺線傳動受力分析[J].機械設計與制造,2014(10):49-52.
[5]呂若塵,任工昌.商用車油箱支架的有限元分析及優化[J].制造業自動化,2014,36(7):77-79.
[6]武帥,郭瑞琴,李中,等.斗輪堆取料機斗輪體結構分析與優化設計[J].機械設計與制造,2014 (11):5-8.
[7]高志晶,朱殿瑞.礦井多功能鏟運車關鍵件的動態仿真分析[J].機械研究與應用,2013,26(4): 44-46.
[8]孫志學,趙星.外螺紋斜軋機軋制系有限元分析與數值模擬[J].計算機與數字工程,2014,42 (7):1203-1206.
[9]管鋒,周傳喜,易先中,等.基于SolidWorks三曲柄單環減速器三維建模及環板的有限元分析[J].煤礦機械,2013,34(3):265-267.
[10]劉雪松,王東亮,薛曉瑩.基于SolidWorks礦用電機車減速器的三維模型建立及輸出軸的有限元分析[J].煤礦機械,2012,33(4):225-227.
[11]唐艷華,趙永生.變位機用轉盤軸承的諧響應分析[J].機械設計與制造,2013(7):175-177.
Force analysis of heavy positioner's turnover frame
TANG Yan-hua,ZHAO Yong-sheng
(1.Parallel robot and mechatronic system laboratory of Hebei province,Yanshan University,Qinhuangdao 066004,China; 2.Key Laboratory of Advanced Forging&Stamping Technology and Science of Ministry of National Education,Yanshan University,Qinhuangdao 066004,China)
Heavy positioner has its own actual requirement,while workpiece gravity influences that badly.Static force analysis of turnover frame is analyzed to obtain screw axial force and the reaction force.In the programming calculation under Matlab,stress change curve of the turnover frame is obtained,which got two limit positions.Its stress and displacement nephogram are got through FEM analyze the two positions.The calculation results paved important guidance way to design heavy positioner.
positioner;turnover frame;static force
TG659
A
1001-196X(2015)02-0060-05
2014-10-18;
2014-12-10
唐艷華(1982-),女,河北張家口人,燕山大學實驗師,工學碩士。主要從事CAD/CAM、并聯機器人技術、變位機技術等方面的研究。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
