五自由度氣浮臺(tái)位置和姿態(tài)的分?jǐn)?shù)階控制
2015-09-21 01:39:56鄧立為宋申民陳興林
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2015年1期
關(guān)鍵詞:系統(tǒng)
鄧立為,宋申民,陳興林
(1.哈爾濱工業(yè)大學(xué) 控制理論與制導(dǎo)技術(shù)研究中心,150086哈爾濱;2.哈爾濱工業(yè)大學(xué) 航天學(xué)院,150001哈爾濱)
氣浮仿真試驗(yàn)平臺(tái)是衛(wèi)星等航天器地面仿真試驗(yàn)的重要組成部分,3個(gè)自由度以上的多自由度氣浮仿真試驗(yàn)臺(tái)可以模擬空間飛行器的位置與姿態(tài)運(yùn)動(dòng),能夠在地面以全物理仿真的形式對(duì)控制律及視覺測(cè)量等多方面空間技術(shù)進(jìn)行驗(yàn)證.五自由度氣浮臺(tái)由兩個(gè)自由度的平移運(yùn)動(dòng)和3個(gè)自由度的姿態(tài)運(yùn)動(dòng)組成,大量文獻(xiàn)對(duì)不同形式的平移運(yùn)動(dòng)以及姿態(tài)運(yùn)動(dòng)進(jìn)行了研究.文獻(xiàn)[1]對(duì)3個(gè)自由度的氣浮臺(tái)姿態(tài)控制問題進(jìn)行了研究.文獻(xiàn)[2]從五自由度氣浮臺(tái)的組成結(jié)構(gòu)入手,對(duì)測(cè)量系統(tǒng)、光學(xué)系統(tǒng)、控制系統(tǒng)和機(jī)械系統(tǒng)等進(jìn)行了介紹.文獻(xiàn)[3]對(duì)在軌衛(wèi)星姿態(tài)控制地面實(shí)驗(yàn)室平臺(tái)進(jìn)行了研究.文獻(xiàn)[4]針對(duì)氣浮臺(tái)質(zhì)量特性的估計(jì)提出了幾種算法,并以實(shí)驗(yàn)的方式檢驗(yàn)了其方法的有效性;但是,上述文獻(xiàn)并沒有考慮氣浮球軸承的球心與姿態(tài)平臺(tái)重心存在偏差的問題,以及沒有考慮執(zhí)行機(jī)構(gòu)的實(shí)際運(yùn)行特性.
基于分?jǐn)?shù)階微分算子的魯棒性與滑模控制優(yōu)勢(shì)產(chǎn)生的分?jǐn)?shù)階滑模控制,近年來得到了廣泛研究與應(yīng)用.文獻(xiàn)[5]以兩自由度的機(jī)械臂系統(tǒng)和水槽模型系統(tǒng)為例,研究了一類非線性系統(tǒng)的模糊分?jǐn)?shù)階滑模控制問題,給出了分?jǐn)?shù)階和整數(shù)階兩種滑模控制器的設(shè)計(jì)過程,并在仿真中對(duì)比說明了分?jǐn)?shù)階滑模的優(yōu)越特性.文獻(xiàn)[6]利用自適應(yīng)神經(jīng)網(wǎng)絡(luò)模糊推理機(jī),針對(duì)兩自由度的機(jī)械臂系統(tǒng),設(shè)計(jì)了分?jǐn)?shù)階模糊自適應(yīng)滑模控制器,對(duì)比說明了分?jǐn)?shù)階自適應(yīng)滑模控制律的優(yōu)越性.文獻(xiàn)[7]針對(duì)防抱死制動(dòng)系統(tǒng),設(shè)計(jì)了分?jǐn)?shù)階滑模控制器和整數(shù)階滑模控制器,并利用仿真驗(yàn)證了分?jǐn)?shù)階滑模的良好特性.總結(jié)上述文獻(xiàn)及相關(guān)文獻(xiàn)可知,分?jǐn)?shù)階滑模控制器具有分?jǐn)?shù)階系統(tǒng)與滑模控制的雙重優(yōu)點(diǎn),有更好的魯棒性和抗干擾性,無論是在理論意義上還是在工程應(yīng)用上都得到了廣泛研究.因上述文獻(xiàn)中分?jǐn)?shù)階滑模控制的應(yīng)用對(duì)象具有一定的特殊性以及文中假設(shè)具有一定的特殊性,所以上述文獻(xiàn)的結(jié)果并不能簡(jiǎn)單地應(yīng)用到五自由度氣浮臺(tái)的位姿控制中.而現(xiàn)有文獻(xiàn)關(guān)于氣浮臺(tái)控制律設(shè)計(jì)的文獻(xiàn)沒有考慮執(zhí)行機(jī)構(gòu)安裝誤差、重心與球心調(diào)節(jié)偏差,本文在考慮上述模型誤差的基礎(chǔ)上,利用分?jǐn)?shù)階理論設(shè)計(jì)具有一定魯棒性的位姿控制律.
1 氣浮臺(tái)位姿描述
1.1 坐標(biāo)系定義
五自由度氣浮仿真平臺(tái)結(jié)構(gòu)與文獻(xiàn)[2]中的氣浮臺(tái)類似.為了能夠?qū)飧∨_(tái)的位移及姿態(tài)進(jìn)行描述,給出3個(gè)坐標(biāo)系定義:1)慣性坐標(biāo)系OxIyIzI,以00級(jí)的大理石平臺(tái)中心為原點(diǎn),定義垂直大理石平臺(tái)平面向上的方向?yàn)閦I軸,以平行大理石相對(duì)較長(zhǎng)的邊為xI軸,相對(duì)較短的邊為yI軸,且OxIyIzI滿足右手坐標(biāo)原則;2)參考位移坐標(biāo)系Oxyz,以氣浮球軸承的球心為坐標(biāo)系原點(diǎn),其坐標(biāo)軸與慣性坐標(biāo)系各軸平行;3)氣浮臺(tái)體坐標(biāo)系Oxbybzb,氣浮平臺(tái)由姿態(tài)平臺(tái)和位移平臺(tái)構(gòu)成,原點(diǎn)定義為姿態(tài)平臺(tái)上的氣浮球軸承的球心,3個(gè)坐標(biāo)軸固連于氣浮臺(tái)上,以姿態(tài)平臺(tái)視覺相機(jī)的安裝方向?yàn)閤b軸,以垂直于xb軸平行于姿態(tài)平臺(tái)的方向?yàn)閥b軸,zb垂直于姿態(tài)平臺(tái)向上,滿足右手規(guī)則,該坐標(biāo)系隨著氣浮臺(tái)的旋轉(zhuǎn)運(yùn)動(dòng)而運(yùn)動(dòng),是臺(tái)上敏感器等設(shè)備安裝時(shí)的基準(zhǔn)坐標(biāo)系.
1.2 氣浮臺(tái)姿態(tài)運(yùn)動(dòng)學(xué)方程
修正的羅德里格參數(shù)(modified rodrigues parameters,MRPs)能在0°≤θ<360°無奇異的全局性描述剛體的姿態(tài)運(yùn)動(dòng),定義為[9]

式中:e是歐拉軸;θ是歐拉旋轉(zhuǎn)角;σ=[σ1σ2σ3]是體坐標(biāo)系相對(duì)于慣性坐標(biāo)系的MRPs描述.
MRPs表示的氣浮臺(tái)姿態(tài)運(yùn)動(dòng)學(xué)方程為

式中:ω=[ω1ω2ω3]T是本體坐標(biāo)系相對(duì)于慣性坐標(biāo)系的姿態(tài)角速度,并表示于本體坐標(biāo)系下.
矩陣G(σ)的定義為

式中:Ⅰ表示3×3的單位矩陣;σ×則表示由向量σ生成的反對(duì)稱矩陣,可以表示為

1.3 氣浮臺(tái)姿態(tài)與位移動(dòng)力學(xué)方程
對(duì)氣浮臺(tái)的姿態(tài)平臺(tái)進(jìn)行質(zhì)量微元分割,利用動(dòng)量定理和牛頓第二運(yùn)動(dòng)定律等相關(guān)知識(shí)可以推導(dǎo)出氣浮臺(tái)的姿態(tài)與位移動(dòng)力學(xué)方程,推導(dǎo)思路與文獻(xiàn)[10]類似.本文重點(diǎn)研究在給定控制模型的基礎(chǔ)上設(shè)計(jì)分?jǐn)?shù)階滑模控制律,所以此處直接給出氣浮臺(tái)姿態(tài)及位移動(dòng)力學(xué)方程,在建模過程中考慮了氣浮臺(tái)不可避免的執(zhí)行機(jī)構(gòu)安裝誤差、重心與球心調(diào)節(jié)偏差,其描述方程分別為
式中:ma∈R+是氣浮臺(tái)姿態(tài)平臺(tái)總質(zhì)量;M是氣浮臺(tái)姿態(tài)平臺(tái)與位移平臺(tái)總質(zhì)量;rc是表示在本體坐標(biāo)系下重心與球心之間的偏差;a0∈R3表示氣浮臺(tái)加速度矢量;J∈R3×3是表示在本體坐標(biāo)系下的氣浮臺(tái)轉(zhuǎn)動(dòng)慣量矩陣;Td1=[Td11Td12Td13]T定義為外干擾力矩;Td2=[Td21Td22Td23]T=ρ×τ1τ1定義為姿態(tài)平臺(tái)上執(zhí)行機(jī)構(gòu)安裝偏差造成的干擾力矩,ρτ1∈R3為姿態(tài)平臺(tái)上執(zhí)行機(jī)構(gòu)安裝偏差帶來的姿態(tài)控制力τ1的推力偏心矢量;Tg=[Tg1Tg2Tg3]T定義為重力不平衡力矩矢量定義為位移平臺(tái)上執(zhí)行機(jī)構(gòu)安裝偏差造成的干擾力矩,ρτ2∈R3為位移平臺(tái)上執(zhí)行機(jī)構(gòu)安裝偏差帶來的位移控制力τ2的推力偏心矢量;u1=[u11u12u13]T表示姿態(tài)控制力矩;τ2=u2=[u21u22u23]T表示位移控制力.
從式(5)、(6)可以看出,姿態(tài)運(yùn)動(dòng)與位移運(yùn)動(dòng)之間具有耦合作用.姿態(tài)動(dòng)力學(xué)方程(5)中,有位移運(yùn)動(dòng)中加速度矢量的影響,這主要是因?yàn)槲灰瓶刂频膱?zhí)行機(jī)構(gòu)冷氣發(fā)動(dòng)機(jī)的安裝使得作用中心不能完全通過球心引起的.位移動(dòng)力學(xué)方程(6)中有重心與球心之間的偏差rc的影響,這主要是由調(diào)平衡系統(tǒng)不能完全調(diào)節(jié)姿態(tài)平臺(tái)重心與球心重合引起的.上述2種因素,在實(shí)際氣浮臺(tái)控制系統(tǒng)中必然存在,只能盡可能減少上述偏差,但不能完全消除偏差的存在.在調(diào)平衡系統(tǒng)的調(diào)節(jié)過程中,利用復(fù)擺工作原理對(duì)調(diào)平衡模塊進(jìn)行調(diào)節(jié),如果重心在球心之上則是一個(gè)不穩(wěn)定的倒立擺系統(tǒng),所以應(yīng)確保重心在球心之下,使得系統(tǒng)是一個(gè)穩(wěn)定的復(fù)擺系統(tǒng),但是如重心在球心下方距離過遠(yuǎn),則會(huì)影響姿態(tài)系統(tǒng)的敏感度,影響了姿態(tài)系統(tǒng)的真實(shí)性.重力向量在參考位移坐標(biāo)系的表示為Fg=0i+0j-magk,重力不平衡力矩則可表示為T'g=rc×Fg,利用坐標(biāo)系的旋轉(zhuǎn)矩陣轉(zhuǎn)換關(guān)系,將T'g按照z(ψ)→y(θ)→x(φ)轉(zhuǎn)序方式轉(zhuǎn)換為本體坐標(biāo)系的表示以符合姿態(tài)動(dòng)力學(xué)方程的描述,轉(zhuǎn)換過程為

式中[φθψ]T表示的是參考位移坐標(biāo)系與本體坐標(biāo)系轉(zhuǎn)換矩陣的歐拉角.
2 氣浮臺(tái)姿態(tài)和位移控制器設(shè)計(jì)
從式(2)和式(5)組成的姿態(tài)控制系統(tǒng)以及式(6)組成的位移控制系統(tǒng)方程可以看出,姿態(tài)控制系統(tǒng)相對(duì)復(fù)雜,所以本文針對(duì)姿態(tài)控制系統(tǒng)設(shè)計(jì)分?jǐn)?shù)階滑模控制律,并且為體現(xiàn)分?jǐn)?shù)階控制的多樣性,針對(duì)位移控制系統(tǒng)設(shè)計(jì)分?jǐn)?shù)階PDμ控制律.
2.1 模糊參數(shù)自整定的分?jǐn)?shù)階滑模姿態(tài)控制律
針對(duì)由式(2)和式(5)組成的氣浮臺(tái)姿態(tài)控制系統(tǒng),選取PD1+α型分?jǐn)?shù)階滑模面為

式中:s=[s1s2s3]T;λ1,λ2,λ3∈R+是比例增益;Dα(·)是分?jǐn)?shù)階微分算子,Caputo型分?jǐn)?shù)階微積分統(tǒng)一定義為[8]

式中:m為比α大的最小整數(shù);伽馬函數(shù)Γ(·)的定義為代表傳統(tǒng)意義上的微分.當(dāng)α>0時(shí),符號(hào)aDαt表示分?jǐn)?shù)階微分;而當(dāng)α<0時(shí)則表示在區(qū)間[a,t]上的分?jǐn)?shù)階積分.下文中,為簡(jiǎn)單方便利用符號(hào)Dαz代替表示aDα
tz.
在上述分?jǐn)?shù)階滑模面式(8)的基礎(chǔ)上,設(shè)計(jì)姿態(tài)控制律為

式中:k1∈R+;k2=diag([k21k22k23])是對(duì)稱正定矩陣;sgn(s)=[sign(s1)sign(s2)sign(s3)]T,sign(·)是符號(hào)函數(shù),定義為

證明 選取Lyapunov函數(shù)為

通過對(duì)式(12)求導(dǎo),并利用式(5)可以得到
將控制律式(10)代入式(13)中,可以進(jìn)一步得到
假設(shè) ‖Td1‖≤d1,‖Td2‖≤d2,‖Tg‖≤d3,當(dāng)選取k2≥‖λ3GJ-1‖(d1+d2+d3)時(shí),對(duì)上式進(jìn)行化簡(jiǎn)整理可以得到

利用文獻(xiàn)[8]中分?jǐn)?shù)階Lyapunov穩(wěn)定性定理及文獻(xiàn)[11]中的經(jīng)典滑模控制引理可知,閉環(huán)系統(tǒng)的狀態(tài)在有限時(shí)間內(nèi)收斂到滑模面s=0.利用文獻(xiàn)[12]滑模PID控制的結(jié)論可以得到0,進(jìn)一步利用矩陣G(σ)的非奇異性,可知=0.
在控制律(10)中,符號(hào)函數(shù)的特性會(huì)引起系統(tǒng)控制力矩的抖振,飽和函數(shù)可以解決此問題,定義為

引入飽和函數(shù)之后,如果k2過小,系統(tǒng)進(jìn)入滑模面的時(shí)間會(huì)過長(zhǎng),抗干擾能力減弱,穩(wěn)態(tài)精度提高.如果k2過大,系統(tǒng)進(jìn)入滑模面的時(shí)間較短,抗干擾能力增強(qiáng),穩(wěn)態(tài)精度降低.因此,開關(guān)增益k2的整定,要綜合考慮系統(tǒng)的響應(yīng)時(shí)間和穩(wěn)態(tài)精度,本文采用模糊推理機(jī)制進(jìn)行參數(shù)自整定.
2.2 分?jǐn)?shù)階PDμ位移控制律
用ρ=[x y0]T表示當(dāng)前氣浮臺(tái)在慣性坐標(biāo)系中的位置,利用類似傳統(tǒng)PID控制思想,文中采用分?jǐn)?shù)階PDμ控制律對(duì)氣浮臺(tái)位移進(jìn)行控制.設(shè)計(jì)分?jǐn)?shù)階PDμ控制律為

式中:δ1,δ2∈R+;Dμ(·)是分?jǐn)?shù)階微分算子.
3 仿真分析
利用MATLAB對(duì)本文設(shè)計(jì)的控制律進(jìn)行驗(yàn)證,分?jǐn)?shù)階微分算子Dασ的數(shù)值計(jì)算,直接利用文獻(xiàn)[13]的分?jǐn)?shù)階控制工具箱FOMCON進(jìn)行仿真.分析姿態(tài)控制律(10)的具體形式可知,控制律的設(shè)計(jì)需要姿態(tài)參數(shù)σ、氣浮臺(tái)加速度矢量a0、角速度ω以及變量的分?jǐn)?shù)階微分運(yùn)算.在工程實(shí)際中,慣性測(cè)量單元IMU包含陀螺儀和加速度計(jì),分別完成對(duì)角速度ω和氣浮臺(tái)加速度矢量a0的測(cè)量,并對(duì)角速度ω進(jìn)行解算得到姿態(tài)參數(shù)σ.在實(shí)際的氣浮臺(tái)控制系統(tǒng)中,采用PC104和DSP2812雙控制核心.當(dāng)PC104作為控制核心時(shí),采用xPC實(shí)時(shí)控制系統(tǒng)方式,利用分?jǐn)?shù)階工具箱FOMCON中的simulink仿真模塊進(jìn)行分?jǐn)?shù)階運(yùn)算.當(dāng)DSP2812作為控制核心時(shí),利用分?jǐn)?shù)階工具箱FOMCON中分?jǐn)?shù)階微分的數(shù)值實(shí)現(xiàn)方式M文件簡(jiǎn)單轉(zhuǎn)化為C語言進(jìn)行實(shí)現(xiàn).
在實(shí)際的氣浮臺(tái)控制系統(tǒng)中,執(zhí)行機(jī)構(gòu)由反作用飛輪和冷氣發(fā)動(dòng)機(jī)組成,反作用飛輪能夠提供連續(xù)控制力矩,但是所提供的控制力矩較小,冷氣發(fā)動(dòng)機(jī)能夠提供較大的控制力,但是其控制方式是開關(guān)控制,也就是只能控制冷氣發(fā)動(dòng)機(jī)的開啟與關(guān)閉,并不能控制其所提供的控制力大小.仿真過程中,考慮冷氣發(fā)動(dòng)機(jī)的實(shí)際運(yùn)行特性,即考慮其開延遲及關(guān)延遲特性τ1=τ2=10 ms,控制系統(tǒng)的采樣周期為50 ms,姿態(tài)控制的成對(duì)冷氣發(fā)動(dòng)機(jī)中單個(gè)提供的最大力矩為u'1i=1 N·m,i=1、2、3,最小有效輸出沖量Ⅰ1i=0.01 N·s.位移控制的冷氣發(fā)動(dòng)機(jī)所提供的最大力為u'2i=2 N,i=1、2、3,最小有效輸出沖量Ⅰ2i=0.02 N·s.在采樣時(shí)刻根據(jù)控制律計(jì)算得到的控制量的大小對(duì)冷氣發(fā)動(dòng)機(jī)進(jìn)行控制,如果u1i≥u'1i,則在這一個(gè)控制周期內(nèi)保持冷氣發(fā)動(dòng)機(jī)為全開狀態(tài);如果u1i<u'1i,則利用占空比計(jì)算冷氣發(fā)動(dòng)機(jī)所需開啟的時(shí)間,實(shí)現(xiàn)位移控制的冷氣發(fā)動(dòng)機(jī)與此工作原理相同.
3.1 仿真參數(shù)設(shè)定
氣浮臺(tái)的轉(zhuǎn)動(dòng)慣量J=J0+ΔJ,仿真參數(shù)設(shè)定如下:J0=diag([96 91 50])kg·m2,ΔJ=3%J,rc=[0 0 0.01]Tmm,ma=82.5 kg,M=148.6 kg.
反作用飛輪的轉(zhuǎn)動(dòng)慣量為
J'=diag([0.006 410.006 410.006 41])kg·m2.反作用飛輪的工作轉(zhuǎn)速范圍是±6 000 r/min,最大反作用力矩0.1 N·m.
氣浮臺(tái)初始位置及姿態(tài)信息設(shè)定為

控制器參數(shù)選取如下:

模糊推理系統(tǒng)的輸入為滑模面si及其導(dǎo)數(shù)·si,輸出為k2i.輸入對(duì)應(yīng)的模糊語言變量均定義為{NB,NM,NS,ZE,PS,PM,PB},與其對(duì)應(yīng)的論域?yàn)閟i={-3,-2,-1,0,1,2,3}和·si={-3,-2,-1,0,1,2,3}.其中,NB為負(fù)大;NM為負(fù)中;NS為負(fù)小;ZE為零;PS為正小;PM為正中;PB為正大.輸出對(duì)應(yīng)的模糊語言定義為{P1,P2,P3,P4},與其對(duì)應(yīng)的論域?yàn)閗2i={0.1,0.8,1.5,2.2}.其中,P1為正小;P2為正中;P3為正大;P4為正最大.k2i利用重心法進(jìn)行解模糊計(jì)算得到.又根據(jù)滑模趨近到達(dá)條件si·si≤0可知,模糊規(guī)則中存在無效不可能的輸出,用NO表示.
采用的模糊規(guī)則為:IfsiisAand·siisB,thenk2iisC.模糊輸入輸出對(duì)應(yīng)的推理規(guī)則和隸屬度函數(shù)分別見表1和圖1.
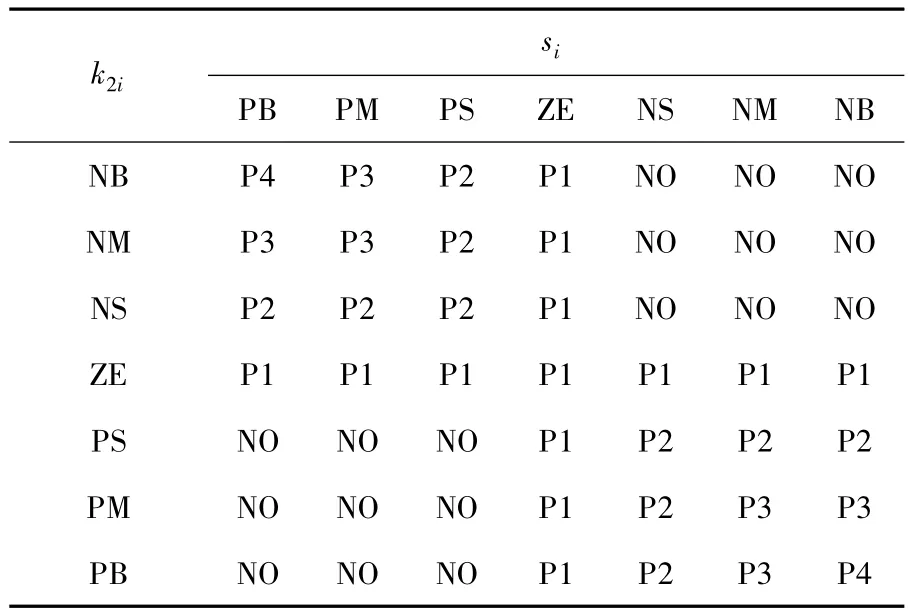
表1 模糊規(guī)則表

圖1 模糊輸入輸出隸屬度函數(shù)
3.2 仿真結(jié)果分析
與大理石平臺(tái)中心相距[40,-60]cm的氣浮平臺(tái),以一定初始姿態(tài)與初始角速度進(jìn)行放飛,在姿態(tài)控制律(10)和位移控制律(17)作用下,得到仿真結(jié)果:圖2是修正羅德里格參數(shù)σ表示的姿態(tài)信息;圖3是氣浮臺(tái)的角速度信息;圖4姿態(tài)控制律u1的曲線,4個(gè)子圖的橫坐標(biāo)都是時(shí)間t,為了能夠清晰看到冷氣發(fā)動(dòng)機(jī)的工作狀態(tài),圖中只給出了仿真時(shí)間中的部分時(shí)間段.為了能夠清晰看到控制律u1分量的PWM工作方式,圖4(b)~(d)分別是向量u1各個(gè)分量的局部放大圖;圖5是氣浮臺(tái)的位移運(yùn)動(dòng)信息;圖6是位移控制律u2曲線.圖6中的4個(gè)子圖表達(dá)方式與圖4相同,圖6(b)~(d)分別是向量u2各個(gè)分量的局部放大圖.

圖2 冷氣發(fā)動(dòng)機(jī)作用下的姿態(tài)曲線

圖3 冷氣發(fā)動(dòng)機(jī)作用下的角速度曲線

圖4 姿態(tài)控制律u1曲線
圖2和圖3表明,分?jǐn)?shù)階滑模控制器(10)能快速實(shí)現(xiàn)對(duì)姿態(tài)的控制,并且具有較高的穩(wěn)態(tài)精度.圖4表明仿真程序合理,符合冷氣發(fā)動(dòng)機(jī)的實(shí)際運(yùn)行特性,能夠以開關(guān)控制方式很好地對(duì)冷氣發(fā)動(dòng)機(jī)進(jìn)行控制;從圖5的子圖中可以看出在冷氣發(fā)動(dòng)機(jī)的作用下,可以很好地利用PWM波方式對(duì)位移平臺(tái)進(jìn)行控制.另外一方面,從圖3的子圖中可以看出,角速度在穩(wěn)態(tài)階段有一定的抖振現(xiàn)象,這是由于冷氣發(fā)動(dòng)機(jī)的實(shí)際控制力大小不可控引起的,不能夠產(chǎn)生足夠小的力來實(shí)現(xiàn)對(duì)小誤差的進(jìn)一步控制.在實(shí)際的氣浮臺(tái)系統(tǒng)中,在系統(tǒng)控制誤差達(dá)到某些給定值時(shí),切換系統(tǒng)的執(zhí)行機(jī)構(gòu),利用反作用飛輪控制,可以解決這種抖振現(xiàn)象,并能進(jìn)一步提高系統(tǒng)的控制精度.圖5表明仿真場(chǎng)景合理,假設(shè)氣浮臺(tái)氣膜厚度不變,也就是氣浮球軸承中心高度不變,與理論分析中ρ03≡0符合,并且在分?jǐn)?shù)階PDμ控制律作用下能夠很好地控制氣浮臺(tái)運(yùn)動(dòng)到期望位置.圖6位移控制律的結(jié)論分析與姿態(tài)控制律的分析類似.

圖5 冷氣發(fā)動(dòng)機(jī)作用下的位移運(yùn)動(dòng)曲線

圖6 位移控制律u2曲線
為了能夠清晰看到氣浮臺(tái)姿態(tài)與位移動(dòng)力學(xué)方程(5)和(6)的耦合效應(yīng),當(dāng)u1=0和Td1=Td2=0時(shí),姿態(tài)動(dòng)力學(xué)方程僅在重力不平衡力矩Tg和耦合項(xiàng)作用下,氣浮臺(tái)姿態(tài)的運(yùn)動(dòng)狀況如圖7所示.當(dāng)u2=0和Td3=0時(shí),位移動(dòng)力學(xué)方程僅在耦合項(xiàng)作用下,氣浮臺(tái)的位移運(yùn)動(dòng)狀況如圖8所示.
從圖7可以看出,氣浮臺(tái)姿態(tài)僅在重力不平衡力矩Tg和耦合項(xiàng)mar×ca0作用下,三軸姿態(tài)做幅值增大的周期性運(yùn)動(dòng).姿態(tài)平臺(tái)重心在氣浮球軸承球心的正下方,從而使得姿態(tài)平臺(tái)的運(yùn)動(dòng)表現(xiàn)為類似“復(fù)擺模型運(yùn)動(dòng)”.位移平臺(tái)的運(yùn)動(dòng)通過加速度a0形成以耦合項(xiàng)mar×ca0的形式作用在姿態(tài)平臺(tái)上,影響了姿態(tài)平臺(tái)的控制.從圖8以及局部放大子圖看出,姿態(tài)平臺(tái)的運(yùn)動(dòng)較小地影響著位移平臺(tái).
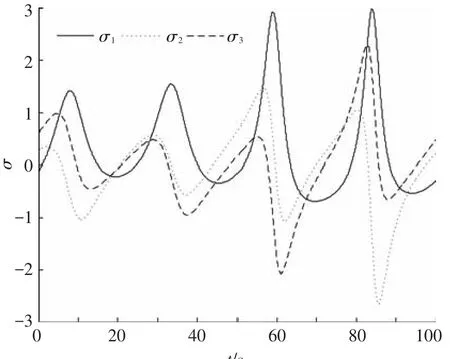
圖7 耦合影響下的姿態(tài)曲線

圖8 耦合影響下的位移運(yùn)動(dòng)曲線
為減小圖3中角速度的抖振現(xiàn)象,當(dāng)姿態(tài)控制偏差達(dá)到一定精度(|σi|<0.001,i=1、2、3)時(shí),切換系統(tǒng)的執(zhí)行機(jī)構(gòu),利用反作用飛輪對(duì)姿態(tài)進(jìn)行控制.冷氣發(fā)動(dòng)機(jī)和反作用飛輪切換作用下的姿態(tài)變化曲線見圖9,角速度變化曲線見圖10,反作用飛輪的轉(zhuǎn)速曲線見圖11.

圖9 冷氣發(fā)動(dòng)機(jī)和飛輪切換作用下的姿態(tài)曲線
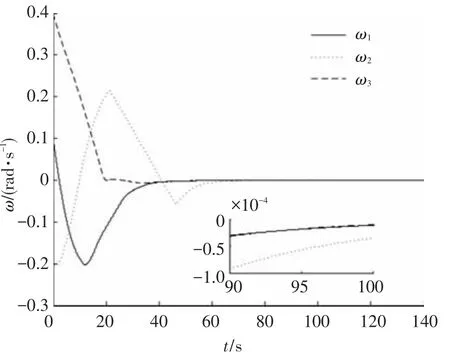
圖10 冷氣發(fā)動(dòng)機(jī)和飛輪切換作用下的角速度曲線

圖11 反作用飛輪轉(zhuǎn)速曲線
從圖9、10和圖2、3對(duì)比可知,在姿態(tài)參數(shù)σ達(dá)到一定精度之后,切換系統(tǒng)的執(zhí)行機(jī)構(gòu),利用反作用飛輪進(jìn)行控制,消除了角速度的抖振現(xiàn)象,并且進(jìn)一步提高了系統(tǒng)的控制精度.從圖11可知,在姿態(tài)參數(shù)σ達(dá)到一定精度之后,反作用飛輪開始起作用,在進(jìn)一步提高系統(tǒng)的控制精度之后,轉(zhuǎn)速趨于穩(wěn)定并在合理轉(zhuǎn)速范圍內(nèi),符合工程實(shí)際要求.
4 結(jié) 語
本文針對(duì)五自由度氣浮仿真平臺(tái)的位置與姿態(tài)控制問題,在具有位姿耦合特性的模型基礎(chǔ)上,分別設(shè)計(jì)了分?jǐn)?shù)階PDμ律及分?jǐn)?shù)階滑模控制律.并以其對(duì)足夠貼近氣浮臺(tái)實(shí)際運(yùn)行狀況的仿真場(chǎng)景進(jìn)行仿真,仿真過程及仿真結(jié)果表明,所設(shè)計(jì)的控制律具有參數(shù)整定容易、抗干擾性強(qiáng)、和良好魯棒性等優(yōu)點(diǎn),具有一定的工程實(shí)際應(yīng)用價(jià)值,能夠?yàn)闅飧∨_(tái)的實(shí)際研究提供一定的理論基礎(chǔ).
在氣浮平臺(tái)搭建的同時(shí),研究反作用飛輪與冷氣發(fā)動(dòng)機(jī)的切換控制,以及研究具有冗余執(zhí)行機(jī)構(gòu)的控制分配問題,是下一步研究的主要內(nèi)容.
[1]LI Y B,GAO Y H.Study on attitude control for three degrees offreedom air-bearing spacecraft simulator[C]//2010 International Conference on Mechanic Automation and Control Engineering,MACE2010.Wuhan:[s.n.],2010:408-411.
[2]XU J,BAO G,YANG Q J,et al.Design and development of a 5-DOF air-bearing spacecraft simulator[C]//2009 International Asia Conference on Informatics in Control,Automation,and Robotics,CAR 2009.Bangkok:[s.n.],2009:126-130.
[3]TRAGESSER S G,AGNES G S,F(xiàn)ULTON J.SIMSAT:A ground-based platform for demonstrating satellite attitude dynamics and control[C]//2002 ASEE Annual Conference and Exposition:Vive L'ingenieur.Montreal:[s.n.],2002:11951-15959.
[4]SCHWARTZ J L,HALL C D.System identification of a spherical air-bearing spacecraft simulator[C]//AAS/AIAA Space Flight Mechanics Meeting.Maui,HI:[s.n.],2005:333-350.
[5]DELAVARI H,GHADERI R,RANJBAR A,et al.Fuzzy fractional order sliding mode controller for nonlinear systems[J].Communications in Nonlinear Science and Numerical Simulation,2010,15(4):963-978.
[6]EFE M O.Fractional fuzzy adaptive sliding-mode control ofa 2-DOF direct-drive robot arm[J]. IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2008,38(6):1561-1570.
[7]TANG Y G,ZHANG X Y,ZHANG D L,et al.Fractional order sliding mode controller design for antilock braking systems[J].Neurocomputing,2013,111:122-130.
[8]DADRAS S,MOMENI H R.Fractional terminal sliding mode control design for a class of dynamical systems with uncertainty[J].Communications in Nonlinear Science and Numerical Simulation,2012,17(1):367-377.
[9]LIANG H Z,WANG J Y,SUN Z W.Robust decentralized coordinated attitude control of spacecraft formation[J].Acta Astronautica,2011,69(5/6):280-288.
[10]許劍.五自由度氣浮仿真試驗(yàn)臺(tái)樣機(jī)的研制及其關(guān)鍵技術(shù)的研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[11]LI S H,DING S H,LI Q.Global set stabilization of the spacecraft attitude control problem based on quaternion[J].International Journal of Robust and Nonlinear Control,2010,20(1):84-105.
[12]呂建婷,李傳江,馬廣富.衛(wèi)星姿態(tài)調(diào)節(jié)的滑模PID控制器設(shè)計(jì)[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2008,40(7):9-12.
[13]TEPLJAKOV A,PETLENKOV E,BELIOV J.FOMCON:Fractional-order modeling and control toolbox for MATLAB[C]//18th InternationalConference-Mixed Design of Integrated Circuits and Systems.Gliwice:[s.n.],2011:684-689.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32