有撓性驅動單元的雙足機器人研制與步行實驗
2015-09-21 01:40:24侯月陽吳偉國高力揚
哈爾濱工業大學學報 2015年1期
侯月陽,吳偉國,高力揚
(哈爾濱工業大學 機電工程學院,150001哈爾濱)
人類肌肉具有緩沖減振作用,可在具有外界沖擊時有效保護人體關節;而仿人機器人大多采用減速器等傳動裝置驅動,缺乏人類肌腱柔性,無法承受很大的沖擊載荷,而且人體關節由兩塊或更多肌肉驅動,以非線性彈簧特性使關節柔順,仿人機器人應該具有類似人的肌肉一樣的撓性驅動.撓性驅動機器人可吸收振動,減緩沖擊,保護機構,同時減小系統的慣量影響,進行能量存儲,以實現雙足機器人穩定步行[1].液壓驅動存在油液泄露問題,氣動人工肌肉控制精度低,繩驅動則無上述缺點,然而繩驅動具有延遲和回差,研究撓性驅動機器人具有深遠意義.
日本東京大學JSK研究室于2010年研制出KENZOH仿人機器人[2],該機器人采用一種繩驅動關節剛度調整機構,其輸出力矩不足以驅動機器人腿部關節[3-4].MASAHIKO研制了“平面肌肉”機構[5],即鋼絲繩在多個帶輪上彎曲多次,以產生大速比.DEWEERTH于2010年研制了繩驅動的仿人單腿機器人[6],該機器人有髖、膝關節俯仰兩個自由度,采用鋼絲繩驅動,該仿人腿機器人結構簡單,但并沒有研制雙足機器人.NAKANISHI等[7]研制出繩驅動骨架機器人KOJIRO,其能夠實現站立姿態下的搖擺平衡控制.TOYOTAKA于2011年研制出仿人機器人KENSHIRO[8],該機器人所有關節自由度與人類相同,但無模塊化驅動單元,其大腿長0.348 m,質量4 kg,輸出角度范圍-30°~40°,輸出29.4 N[9].NAKANISHI研究室研制了繩驅動仿人機器人KOTARO[10],該機器人采用繩驅動肌肉單元,其雙腿僅能單向運動.
人類常速步行著地沖擊力為體重的3.5倍,跑步著地沖擊為5倍,最大為7倍,剛性驅動難以緩沖機器人在未知環境下進行跳躍或者步行的沖擊,撓性驅動可緩解沖擊.目前,僅有早稻田大學高西研究室研制出全撓性仿人雙足機器人,其步速為0.023 km/h[11];世界上速度最快的剛性驅動機器人步速為9 km/h[12],其無法緩沖很大的沖擊載荷.
由于撓性驅動難于控制,所以本文首先采取撓性驅動關節與剛性驅動關節混合驅動機器人的辦法研究仿人雙足穩定步行問題.在設計研制的FDU-I[13]、FDU-II型撓性驅動單元和所設計單元控制器基礎上[14-15],研制一種髖關節帶有兩個撓性驅動的雙足步行機器人,研究其穩定步行控制問題,后續研究逐步增加驅動單元,以實現全部撓性驅動.
1 仿人雙足機器人的設計
受到仿生肌腱的啟發,利用鋼絲繩模擬人類肌腱,并將繩驅動機構設計成模塊化撓性驅動單元,該單元類似于人類肌肉的工作方式,鋼絲繩拉緊時便可驅動關節運動,同時,鋼絲繩的撓性可吸收振動,緩解沖擊.將撓性驅動單元用于雙足機器人,模擬人類雙腿的運動方式,不僅在仿生學上實現類人,也能有效降低機器人受到的外界沖擊,從而減小傳遞到電氣部分的振動.為實現仿人肌腱驅動的步行方式,同時驗證撓性驅動單元對機器人關節的驅動能力,設計FDUBR-I型仿人雙足機器人,由于撓性驅動存在回差和時滯,配置多個撓性驅動的機器人步行控制難度較大,因此并沒有將機器人所有關節都配置撓性驅動單元,而是在其雙腿髖關節各布置一個撓性驅動單元,用于驅動FDUBR-I的髖關節俯仰自由度.
1.1 機構自由度配置與規格
為研究撓性驅動在雙足機器人上的應用,設計10自由度FDUBR-I型仿人雙足機器人(三維模型軸測圖如圖1(a)所示),腿部自由度采用2-1-2配置(自由度配置如圖1(b)所示),即髖關節為橫滾和俯仰自由度,膝關節為俯仰自由度,踝關節為俯仰和橫滾自由度.兩個撓性驅動單元分別驅動左、右髖關節俯仰自由度,而且撓性驅動單元設計模塊化接口,可作為機器人大腿部件,并方便地與膝關節和髖關節其他部件相連接.FDUBR-I型機器人整機質量22.5 kg,質量分布如圖1(c)所示.

圖1 機器人三維模型與參數
1.2 撓性驅動單元
FDU-II型撓性驅動單元(如圖2)是基于仿生肌腱驅動和動滑輪組增力原理而設計的模塊化單元,其長寬高分別為279.0、105.2、107.0 mm;性能測試試驗結果表明:該單元具有負載能力大(額定轉矩12.6 N·m,此轉矩下單元輸出轉速77.5(°)/s)、頻響高(6.1 Hz)、減緩沖擊(減緩≥34.5%)等特點,該撓性驅動單元在額定負載下傳動與控制誤差合計<±0.92°.FDU-II構成如圖2(a)所示,其原理圖如圖2(b)所示.符號*表示鋼絲繩固定點.
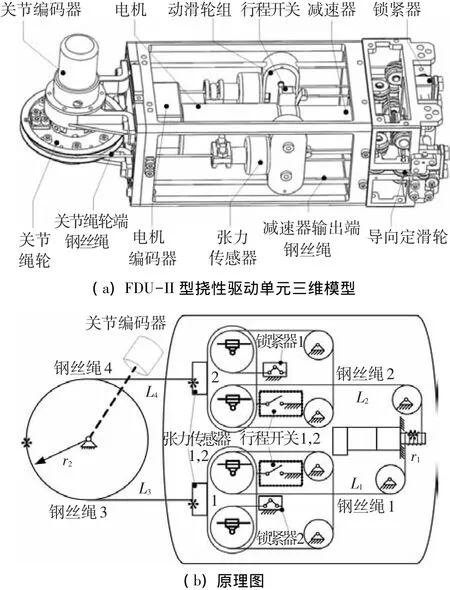
圖2 FDU-ⅠⅠ型撓性驅動單元三維模型及原理圖
1.3 機器人其他關節驅動
根據仿真和實驗結果,雙足機器人橫滾關節對驅動能力的要求比俯仰關節的低,但是橫滾關節的剛度對于機器人單腳支撐期的穩定步行至關重要.俯仰關節是雙足步行中最重要的關節,必須能夠輸出高轉速和大扭矩.
除髖關節俯仰自由度采用FDU-II型撓性驅動單元驅動之外,其他關節均采用DC伺服電機-同步齒形帶-諧波減速器的驅動方式.諧波減速器由于高速比、高精度、高剛度而廣泛用于機器人系統.各關節驅動能力參數(含FDU-II型撓性驅動單元的參數)如表1所示,撓性驅動單元用來驅動髖關節Pitch自由度.該撓性驅動單元已申請發明專利[13].
表1 關節驅動能力的設計參數
2 仿人雙足機器人研制
研制的FDUBR-I型仿人雙足機器人整機實物圖如圖3(a)所示,搭建的FDUBR-I型仿人雙足機器人系統實物如圖3(b)所示.該雙足步行機器人特點是:小型化、輕量化(直立高度為731 mm,整機22.5 kg);具有開放性(可以添加各種傳感器,系統擁有預留A/D、IO、串口、PCI接口等).FDUBR-I型仿人雙足機器人的計算機控制系統由硬件、軟件兩部分組成.FDUBR-I型仿人雙足機器人控制系統硬件框圖如圖4所示.
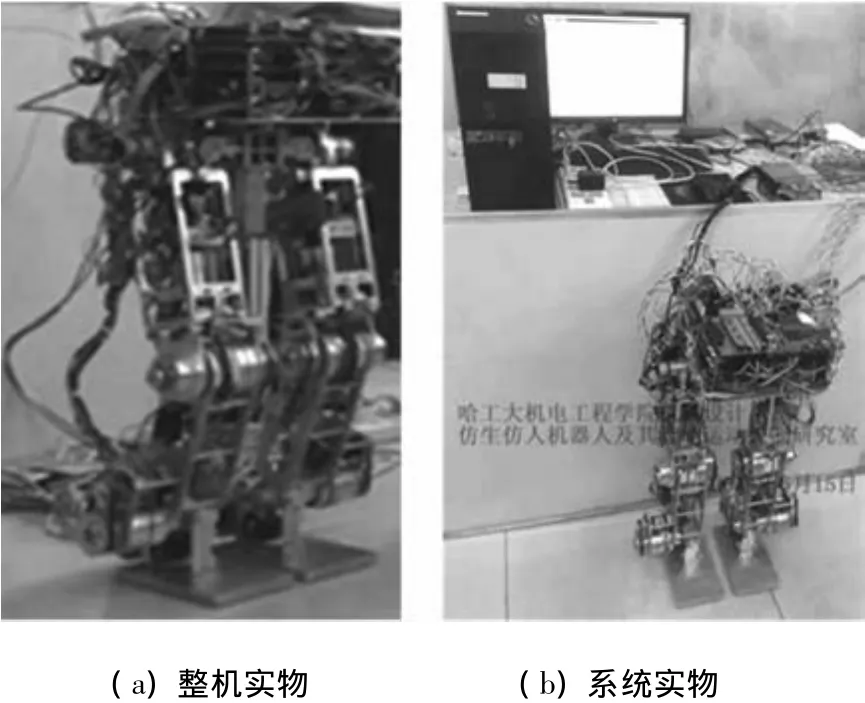
圖3 仿人雙足機器人

圖4 機器人控制系統硬件構成
單塊PMAC運動控制卡與上位機通過點對點的以太網進行通信,該通信方式最多只能讓一塊PMAC板卡同時驅動6個電機,而FDUBR-I型仿人雙足機器人搭載10個電機,因此搭建符合IEEE802.3規范的交換式以太網絡進行上位機與兩塊多軸運動控制卡PMAC的通信,其數據傳輸速率達到10 Mbit/s,經測試,上位機與PMAC通信周期為1.6 ms(從上位機發送數據到PMAC,并從PMAC返回數據到上位機).
編寫的FDUBR-I型仿人雙足機器人的計算機控制系統軟件模塊包含運動控制模塊和傳感器信號處理模塊兩部分,用于實現機器人的雙足穩定步行.利用PMAC運動控制卡的動態鏈接庫PCOMM32.DLL,在Windows XP系統下完成控制系統軟件的編寫.該軟件功能:為上位機與PMAC運動控制卡建立通訊;發送機器人步行控制指令到運動控制卡;接收傳感器信號實時顯示并存儲在上位機.控制系統軟件模塊框圖如圖5所示.
PMAC軟件包括用于撓性驅動單元的基于黏彈性動力學模型反饋的關節全閉環與張力反饋控制器[14](其原理如圖6所示).由于采用鋼絲繩傳動從而撓性單元具有較大的回差和滯后,且系統頻響較低.為解決這一問題,采用一種張力反饋和關節全閉環的控制策略,通過黏彈性動力學模型進行關節位置和關節速度反饋,根據鋼絲繩彈性變形進行關節速度和關節加速度的前饋.關節位置誤差與速度誤差反饋,相當于在電機內部位置環與速度環的基礎上引入關節的位置環與速度環.對彈性變形的速度與加速度前饋,其基本思想是通過彈性變形公式[14]可求得鋼絲繩伸長量,由伸長量求得需要前饋的速度與加速度,通過實時修改速度前饋系數與加速度前饋系數來達到補償鋼絲繩伸長量的目的.
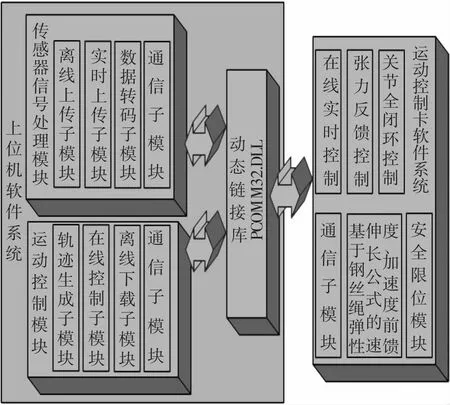
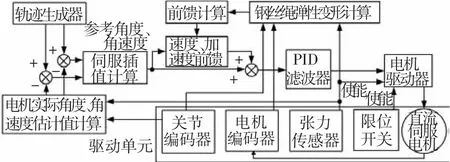
圖6 撓性驅動單元控制器原理[15]
3 仿人雙足機器人步行實驗
雙足步行實驗目的:實現帶有部分撓性驅動的雙足機器人步行;驗證撓性驅動對雙足機器人的驅動能力;驗證基于黏彈性動力學模型反饋的關節全閉環與張力反饋控制器[14-15]對撓性驅動單元的控制作用.分別對撓性驅動單元采用PID伺服跟蹤控制、關節全閉環與張力反饋控制的雙足機器人步行實驗.
3.1 采用PⅠD軌跡跟蹤控制的步行實驗
首先進行對雙足機器人各關節均采用PID軌跡跟蹤控制的步行實驗.對撓性驅動單元采用關節PID軌跡跟蹤控制的步行實驗按步速、步數分組進行,步行實驗步速序列:0.02、0.04、0.06、0.08 km/h,步速由步長和步行周期決定,每種步速下,再分成3組不同步長、步行周期的實驗,步長分別是220、240、260 mm,所有的步行樣本是按著文獻[16]方法生成,各組均進行了5次步行實驗.
機器人步行樣本6步(包括起步、2個完整步行周期、完了步),按步速分成5組進行實驗,機器人均未完成整個步行過程,各步速下機器人最多能夠步行3步,在該系列實驗最高步速(0.08 km/h,步長220 mm,步行周期10 s)下分別完成了1步步行1次,2步步行3次,3步步行1次,步行3步的實驗視頻按時間序列視頻截圖如圖7所示,機器人在第3步未結束時傾覆.
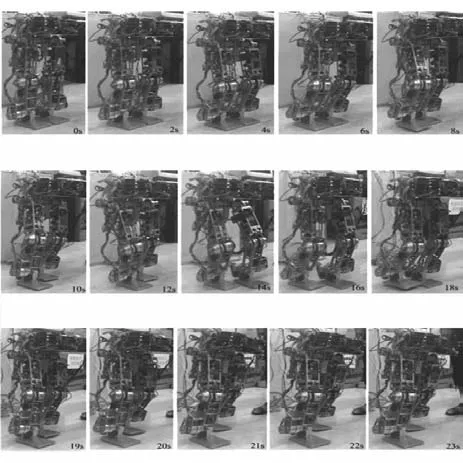
圖7 采用PⅠD控制器的步行實驗視頻截圖(光滑瓷磚地面)
FDU-II鋼絲繩張力、髖關節俯仰力矩、FDUII關節角、FDU-II關節角誤差、FDU-II關節相圖分別如圖8(a)~(f)所示.髖關節俯仰力矩最大值為15.6 N·m,該沖擊力矩也是機器人傾覆時造成的,盡管超出了FDU-II型撓性驅動單元額定力矩(12.6 N·m),但其機械、電氣部分仍可正常工作,表明撓性驅動單元額定力矩并非撓性驅動單元的極限輸出力矩,其具有一定的過載能力,邁步過程的力矩峰值為8.7 N·m,力矩較大,但未超過撓性驅動單元額定力矩.撓性驅動單元在21 s時刻關節跟隨誤差為5.2°,在此之前,跟隨誤差已呈發散趨勢,在10~12 s區間內關節跟隨誤差已達到4.4°.機器人僅步行3步傾覆,機器人在右腿邁步即將結束時,發生了雙腳的頻繁振蕩,產生了較大關節力矩,左、右腿分別出現了從-20.2~-35.8(°)/s、從21.3~36.2(°)/s的速度突變,突變分別達到77%、70%,且雙腿髖關節極限環均發生較大偏移,表明機器人撓性關節處于非正常工作狀態.
對撓性驅動單元采用PID軌跡跟蹤控制的雙足機器人步行實驗結果表明,機器人撓性驅動關節軌跡跟蹤誤差較大(5.2°),關節有較大沖擊力矩(15.6 N·m),機器人在第3步邁步階段已經發生傾覆,而機器人采用諧波減速器的關節跟隨誤差約為1°.實驗結果表明:單純PID軌跡跟蹤控制不適用于撓性驅動單元,得不到持續的穩定步行結果.為此,本文進一步進行撓性驅動關節全閉環與張力反饋控制下仿人雙足步行機器人持續穩定步行實驗.

圖8 步行實驗結果(PⅠD控制)
3.2 采用關節全閉環與張力反饋控制的步行實驗
對撓性驅動單元采用關節全閉環和張力反饋控制,分別按3.1小節分組方法進行機器人步行實驗.該系列實驗下的機器人能夠完成各組步行運動,目前步速最大可達0.1 km/h(步長260 mm,步行周期10 s),其實驗視頻按時間序列視頻截圖如圖9所示.

圖9 撓性驅動關節全閉環和張力反饋控制下持續穩定雙足步行實驗(光滑瓷磚地面)
FDU-II撓性關節(即撓性驅動單元驅動下髖關節)力矩、關節角誤差分別如圖10(a)~(f)所示.
髖關節俯仰關節兩側鋼絲繩牽引力矩最大值為5.2 N·m,未達到FDU-II型撓性驅動單元額定力矩(12.6 N·m)的1/2,具有較大力矩余量,采用PID軌跡跟蹤控制力矩為8.7 N·m.關節實際轉速最大為29.5(°)/s,僅為FDU-II型撓性驅動單元額定轉速(77.5(°)/s)的2/5,該步速下關節轉速較低,速度余量較大;FDU-II關節最大跟蹤誤差為0.89°.
FDU-II驅動單元的關節極限環(如圖10(a)、(b)中的大環)呈現周期性循環狀態,兩腿在完整步行周期內各邁步4次,極限環分別有4個大環,表明機器人在邁復步的步行過程中處于穩定狀態,中間的小環為下蹲和起立過程,交叉環為初始和最后的半步,這兩個環都是單環.兩個撓性驅動單元關節極限環未出現速度峰值點,可知撓性驅動單元關節是穩定的.
采用撓性驅動單元關節全閉環和張力反饋控制,機器人能夠實現穩定步行,撓性驅動關節跟隨誤差較小,鋼絲繩所受張力較小,且無較大突變,表明關節全閉環和張力反饋控制器對撓性驅動單元具有良好控制效果.

圖10 關節全閉環與張力反饋控制下的步行實驗結果
4 結 論
1)設計、研制了10自由度FDUBR-I型仿人雙足機器人,該機器人髖關節俯仰自由度由FDU-II型撓性驅動單元驅動,具有小型化、輕量化、開放性等特點.
2)搭建了FDUBR-I型仿人雙足機器人控制系統硬件和軟件,該控制系統包括FDU-II型撓性驅動單元的張力反饋和關節全閉環控制子系統以及剛性關節軌跡跟蹤控制子系統,可實現對雙足步行機器人的在線實時控制.
3)進行了FDUBR-I型仿人雙足機器人穩定步行實驗,機器人步速可達0.1 km/h(日本早稻田大學于2012年研制的繩驅動機器人步速為0.023 km/h[11]),步行實驗結果表明關節全閉環和張力反饋控制器對雙足機器人具有頻響高、跟蹤誤差小及有效減緩沖擊力等良好控制效果,撓性驅動單元對雙足機器人具有足夠的驅動能力.
4)對于實現的0.1 km/h步速,FDU-II型撓性驅動單元尚余有額定力矩的1/2、額定輸出轉速的3/5的驅動能力,且該步速下各關節中實際所需驅動力矩最大(12 N·m)關節為膝關節,表明所研制的FDUBR-I型仿人雙足機器人尚有提高步速的潛力,而且FDU-II型撓性驅動單元也有能力作為其膝、踝關節使用.同時也意味著所有關節皆采用撓性驅動方式在穩定步行控制上可能會更加困難、復雜,富有挑戰性.
5)作為下一步研究工作,今后將由2個撓性驅動單元逐步增加至4~10個、研制以撓性驅動為主乃至全部采用撓性驅動單元驅動的仿人雙足步行機器人,進行撓性驅動控制理論與抗大沖擊試驗研究.
[1]ABE K,SUGA T,FUJIMOTO Y.Control of a biped robot driven by elastomer-based series elastic actuator[C]//IEEE International Workshop on Advanced Motion Control.Piscataway:IEEE,2012:1-6.
[2]MASAHIKO O,NOBUYUKI I,YUTO N,et al.Stiffness readout in musculo-skeletal humanoid robot by using rotary potentiometer[C]//IEEE Sensors.Piscataway:IEEE,2010:2329-2333.
[3]NAKANISHI Y,ITO N,SHIRAI T,et al.Design of powerful and flexible musculoskeletal arm by using nonlinear spring unit and electromagnetic clutch opening mechanism[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2011:377-382.
[4]NAKANISHI Y,IZAWA T,KUROTOBI T,et al.Achievement of complex contact motion with environments by musculoskeletal humanoid using humanlike shock absorption strategy[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE,2012:1815-1820.
[5]OSADA M,IZAWA T,URATA J,et al.Approach of“planar muscle” suitable for musculoskeletal humanoids,especially for their body trunk with spine having multiple vertebral[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2011:358-363.
[6]MIGLIORE S A,TING L H,de WEERTH S P.Passive joint stiffness in the hip and knee increases the energy efficiency of leg swinging[J].Autonomous Robots,2010,29(1):119-135.
[7]MIZUUCHI I,NAKANISHI Y,SODEYAMA Y,et al.An Advanced Musculoskeletal Humanoid Kojiro[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2007:294-299.
[8]KOZUKI T,MIZOGUCHI H,ASANO Y,et al.Design methodology for the thorax and shoulder of human mimetic musculoskeletal humanoid Kenshiro-a thorax structure with rib like surface[C]//IEEE/RSJ International Conference on Intelligent Robotsand Systems.Piscataway:IEEE,2012:3687-3692.
[9]ASANO Y,MIZOGUCHI H,KOZUKI T,et al.Lower thigh design of detailed musculoskeletal humanoid“Kenshiro”[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway:IEEE,2012:4367-4372.
[10]MIZUUCHI I,NAKANISHI Y,NAMIKI Y,et al.Realization of standing of the musculoskeletal humanoid kotaro by reinforcing muscles[C]//IEEE-RAS International Conference on Humanoid Robots.Piscataway:IEEE,2006:176-181.
[11]HASHIMOTO K,TAKEZAKI Y,MOTOHASHI H,et al.Biped walking stabilization based on gait analysis[C]//IEEE International Conference on Robotics and Automation.Piscataway:IEEE,2012:154-159.
[12]KAMIDE H,MAE Y,TAKUBO T,et al.Direct comparison of psychological evaluation between virtual and real humanoids:Personal space and subjective impressions[J].International Journal of Human-Computer Studies,2014,72(5):451-459.
[13]吳偉國,侯月陽.具有張力和關節位置反饋的機器人關節用撓性驅動單元:中國,201410257786.5[P].2014-06-11[2014-09-22].http://www.drugfuture.com/cnpat/cn-patent.asp.
[14]WU Weiguo,HOU Yueyang.Controller design and experiment based on viscoelasticity dynamics model for a flexible driveunit[J].JournalofCentralSouth University of Technology,2014,21(12):4468-4477.
[15]吳偉國,侯月陽.具有張力和關節位置反饋的機器人關節用撓性驅動單元控制方法:中國,
201410494011.X[P].2014-09-12[2014-09-22].http://www.drugfuture.com/cnpat/cn-patent.asp.
[16]WU WEIGUO,HOU YUEYANG.Research on rapid walking of biped robot based on parametric surface table cart model[C]//IEEE International Conference on Robotics and Biomimetics.Piscataway:IEEE,2009:463-468.