基于波導不變量的雙陣元被動探測方法研究
2015-10-13 11:37:56唐凱周德富韓慶邦李建范洪輝殷澄朱昌平
聲學技術 2015年2期
唐凱,周德富,韓慶邦,李建,范洪輝,殷澄,朱昌平
?
基于波導不變量的雙陣元被動探測方法研究
唐凱1,2,周德富2,韓慶邦1,3,李建1,2,范洪輝4,殷澄1,朱昌平1
(1. 河海大學物聯網學院,江蘇常州 213022;2. 國家海洋局南海維權技術與應用重點實驗室,廣東廣州510310; 3. 河海大學淮安研究院,江蘇淮安 223001;4. 江蘇理工學院計算機工程學院,江蘇常州 213001)
利用一種水聲信道統計不變特征(波導不變量)實現被動探測。采用雙陣元,分別對每一個陣元接收的寬帶噪聲信號進行LOFAR分析,對LOFAR圖利用Hough變換等圖像處理方法進行參數估計,得到波導不變量和曲線(文中討論拋物線)參數估計值,進而運用幾何關系估計出運動目標的航向角、速度和距離信息。利用Matlab仿真驗證了該方法的正確性。
被動探測;波導不變量;參數估計;聲學工具箱
0 引言
被動測距作為聲吶系統的主要任務之一,一直是水聲工作者致力解決的問題。當前被動測距技術主要方法有:(1) 三元陣被動測距[1-3]關鍵技術為高精度的時延估計;(2) 匹配場被動測距[4-6],是水聲物理學和信號處理學的結合,它充分考慮了聲波在不同環境參數海洋信道中的傳播規律,可以對聲源深度和距離同時估計。但是容易出現模糊,對失配也比較敏感;(3) 目標運動分析[7](Target Motion Analysis, TMA)方法,包括純方位TMA、頻率-方位TMA、多途TMA等多種方法。近年來,隨著波導不變量研究的深入,從聲場干涉結構提取聲源距離的方法得到迅速發展。
本文提供了一個簡單有效的方法來估計運動聲源信息(航向、速度、距離等)。首先需要得到通過持續接收目標聲信號產生的LOFAR圖,然后對該圖利用Hough變換進行圖像處理,提取圖中曲線的參數值(計算波導不變量)。最后結合陣元之間的幾何關系與干涉條紋方程[9],估計出目標的運動信息。
1 波導不變量
根據定義,波導不變量[8,10]可以表示為:
如圖1所示,在Pekeris波導下,通過仿真數據可得到距離-頻率圖。從圖中可以清晰地看到有規律的干涉圖案,它們的干涉條紋斜率也可以通過波導不變量來表征。
2 干涉條紋方程
在距離無關波導的情況下,假設目標運動如圖2所示,是一個由遠及近、由近及遠的過程。接收陣的聲學中心R位于坐標原點O,目標s作勻速直線運動,其速度為,輻射寬帶連續譜信號,最近通過距離為,最近通過時刻為。
由幾何運動關系可以推導[11]得出LOFAR圖上干涉條紋滿足下面關系式:

式(3)又可以寫成:
(4)
式(4)符合拋物線的標準方程:
式(5)中,為拋物線參數,是正常數。
圖2 單陣元目標運動示意圖
Fig.2 Target motion diagram for a single sensor
3 雙陣元測距原理
雙陣元定位模型如圖3所示。目標通過陣元A和B的最近距離分別為和,最近時刻分別為和,為兩陣元間距離,航向角為。
每個陣元接收器信號生成LOFAR圖,干涉條紋都滿足式(2),呈拋物線狀。
由式(4)和式(5),可以得出:

于是,根據式(6),可以得出目標經過陣元A和陣元B的最近距離分別為:
(7)
由圖3中簡單幾何關系,有:
(9)

兩個陣元上都會接收到信號,得到相關的LOFAR圖,通過對LOFAR圖干涉條紋的處理,可以分別求得波導不變量,取相關和均值得到一個相對精確的波導不變量。結合式(7)~(10)可以求得目標速度信息、航向信息和最近點距離。
4 仿真研究
本文用計算機仿真來驗證以上方法的準確性和合理性。仿真主要采用聲學工具箱(AT)。仿真設定:動目標以3.23 m/s作勻速運動(如圖3所示),運動方向與陣元方向的夾角為37°,與陣元A的最近距離為,陣元A和陣元B之間的距離為,目標運動時持續輻射300~600 Hz的低頻寬帶噪聲。本次仿真主要環境參數如圖4所示。
在圖3模型中,通過仿真可以在A陣元和B陣元處分別得到LOFAR圖A和LOFAR圖B,如圖5所示。從圖5中可以看到明顯的拋物線形狀的干涉條紋,這是因為低頻聲場存在穩定的干涉結構,當動目標由遠-近-遠通過陣元時,接收器上產生的LOFAR圖干涉條紋形狀就會呈現拋物線型。而拋物線的頂點所對應的時刻,就是通過最近點(CPA)的時刻。
以上數據結合上文中定位算法,可以求出目標的運動信息如表1所示,表中同時給出了真實值和估計值。比較兩者,可以求得誤差,從而驗證了方法的正確性。
(a) LOFAR圖A
(b) LOFAR圖B
圖5 仿真數據LOFAR圖
Fig.5 LOFARgrams obtained from simulation data
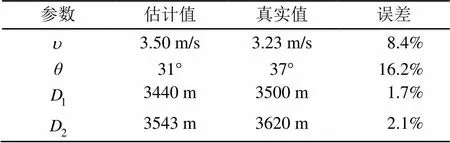
表1 目標運動參數估計值與真實值對比
由表1可以看出,通過比較真實值和估計值,兩個最近點距離的誤差分別是1.7%和2.1%,速度的誤差是8.4%,航向誤差為16%。仿真研究發現此方法在估計目標距離時獲得了較好的結果,誤差不超過3%,速度和航向誤差稍顯大些。
仿真分析可知,在估計航向角時,估計的精度不是很高,而航向角是由式(9)確定,由于和速度同時需要估計,此間運算涉及到的近似較多,而且在運用拋物線模型的同時本身也會有一些誤差,所以此方法在估計航向角時有一定的缺陷。
上述仿真沒有考慮噪聲影響,但實際情況下LOAFR圖的信噪比對于條紋識別、波導不變量提取以及運動信息的估計有著非常大的影響。表2給出了加入不同信噪比噪聲后,經過多次蒙特卡洛仿真對估計結果產生的影響。
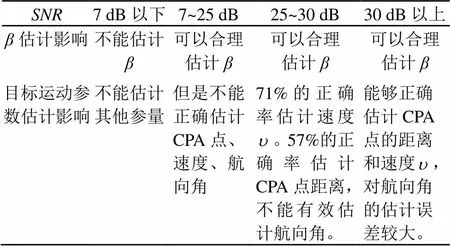
表2 添加噪聲后參數估計結果
5 結論
本文提出了一個較為簡便有效的方法來估計目標運動的參數(距離、航向、速度)。目標運動時輻射穩定的低頻寬帶噪聲信號,在陣元接收器處可以獲得較為清晰的干涉結構(LOFAR圖)。此方法需要至少兩個陣元,結合一種圖像處理方法Hough變換,分別對兩陣元上獲得的LOFAR圖進行處理,估計得到干涉條紋曲線的參數和波導不變量,結合幾何運動信息,達到最終估計參數的目的。
本文通過AT工具箱仿真得到LOFAR圖,驗證了此方法的合理性。參數估計結果顯示,在限定條件下,對距離的估計效果較好,誤差不超過3%。
本文的方法較其他被動探測方法,不需要環境先驗知識就能對目標運動參數進行估計,而且算法簡便。從仿真結果可以看出,在未考慮背景干擾的情況下,相當于在高信噪比條件下,該被動測距算法有較高的估計精度,通過表2分析可知,本方法對接收信噪比有要求,信噪比在20 dB以上時可正確估計,在30 dB以上時對目標速度、最近點距離等的估計可信。被動測距的穩健性分析和實驗研究將是今后的工作重點。
[1] 李啟虎. 數字式聲納設計原理[M]. 安徽: 安徽教育出版社, 2002: 350-353.
LI Qihu. The design principle of digital sonar[M]. Anhui: Anhui Education Publishing House, 2002: 350-353.
[2] 仲祺祺, 毛衛寧. 雙基陣被動定位位置估計算法研究[J]. 聲學技術, 2003, 22(4): 269-272.
ZHONG Qiqi, MAO Weining. Estimation algorithm of bistatic passivelocation[J]. TechnicalAcoustics, 2003, 22(4): 269-272.
[3] 行鴻彥, 唐娟. 時延估計方法的分析[J]. 聲學技術, 2008, 27(1):110-114.
XING Hongyan, TANG Juan. Analysis and survey of algorithms for Time-delay estimation[J]. TechnicalAcoustics, 2008, 27(1): 110-114.
[4] Melvin J. Hinich. Maximum likelihood estimation of the position of a radiating source in a waveguide[J]. J. Acoust. Soc. Am, 1979,66(2): 480-483.
[5] Shang EC. Source depth estimation in waveguides[J]. J. Acoust. Soc. Am, 1985,77(4): 1413-1418.
[6] Yang TC. A method of range and depth estimation by modal decomposition[J]. J. Acoust. Soc. Am, 1987,82(5): 1736-1745.
[7] 毛衛寧.水下被動定位方法回顧與展望[J]. 東南大學學報, 2001,31(6): 1-4.
MAO Weining. Review and prospect of passive positioning method of underwater[J]. Journal of Southeast University, 2011, 31(6): 1-4.
[8] Chuprov S D. Interference structure of a sound field in alayered ocean[M]. Nanka Moscow, 1982, 71-91.
[9] 李啟虎. 淺海波導中水下目標輻射噪聲干涉條紋的理論分析和試驗結果[J]. 聲學學報, 2011, 36(3): 254-257.
LI Qihu. Theoretical analysis and experimental results of Interference striation pattern of underwater target radiated noise in shallow water waveguide[J]. Acta Acustica, 2011, 36(3): 254-257.
[10] Brekhovskikh L M, Lysanov Y P. Fundamentals ofOcean Acoustics[M]. 2nd ed. NewYork: Springer-Verlag, 1991: 140-152.
[11] 李建. 聲矢量傳感器線陣波導不變量被動測距研究[J]. 應用聲學, 2012, 31(4): 250-254.
LI JIAN. Studies of waveguide invariant passive ranging of acoustics vector sensor line array[J]. Applied Acoustics, 2012, 31(4): 250-254.
Waveguide invariant based passive detection method
TANG Kai1,2, ZHOU De-fu2, HAN Qing-bang1,3, LI Jian1,2,FAN Hong-hui4, YIN Chen1, ZHU Chang-pin1
(1.College of IOT Engineering,Hohai university, Changzhou 213022, Jiangsu, China;2.TheState Oceanic Administration, technology and application of Key Laboratory of the South China Sea Rights, Guangzhou 510310,Guangdong, China;3. Huaian Research Institute of Hohai University, Huaian223001, Jiangsu, China; 4. School of Computer Engineering, Jiangsu University of Technology, Changzhou 213001, Jiangsu, China)
The passive detection is realized by using a statistical invariant feature of underwater acoustic channel (waveguide invariant).The proposed method needs two sensors at least to calculate the motion parameters. LOFARgrams analysis is made for broadband noise signals which are respectively received by the two sensors.To get the estimation values of waveguide invariant and parameters ofcurve, HOUGH conversion is used for parameter estimation of LOFARgrams.Then the moving target’s angle,distance and speed are estimated according to geometrical relationship.The method has been employed to process the LOFARgrams obtained from Acoustic Toolbox simulation,and the estimated results of target parameters show the validity of the method.
passive detection; waveguide invariant; parameter estimation; Acoustic Toolbox
TN929.3
A
1000-3630(2015)-02-0139-04
10.16300/j.cnki.1000-3630.2015.02.007
2014-04-01;
2014-07-04
國家自然科學基金(11274091, 61302124, 11274092)、國家海洋局南海維權技術與應用重點實驗室2013年度開放基金(1306)、河海大學中央高校基金項目(2011B11014, 2013B18514)、淮安河海研究生院開放基金資助項目。
唐凱(1990-), 男, 江蘇人, 碩士, 研究方向為水聲信號處理。
韓慶邦, E-mail: hqb0092@163.com
猜你喜歡
語數外學習·高中版上旬(2024年18期)2024-02-20 00:00:00
中學生數理化(高中版.高二數學)(2022年1期)2022-04-26 13:59:56
中學生數理化·中考版(2021年10期)2021-11-22 07:26:38
中學生數理化·中考版(2019年10期)2019-11-25 09:39:04
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·中考版(2017年10期)2017-04-23 06:29:38
中學生數理化(高中版.高二數學)(2017年1期)2017-04-16 05:33:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
