無人機螺旋自主認知與改出控制器設(shè)計
2015-10-22 09:40:37黃漢橋趙鑫周歡王族統(tǒng)
西北工業(yè)大學(xué)學(xué)報 2015年6期
關(guān)鍵詞:方法
黃漢橋,趙鑫,周歡,王族統(tǒng)
(1.空軍工程大學(xué)航空航天工程學(xué)院,陜西西安 710038;2.西北工業(yè)大學(xué) 陜西西安 710072)
無人機螺旋自主認知與改出控制器設(shè)計
黃漢橋1,2,趙鑫1,周歡1,王族統(tǒng)1
(1.空軍工程大學(xué)航空航天工程學(xué)院,陜西西安 710038;2.西北工業(yè)大學(xué) 陜西西安 710072)
針對飛行器螺旋改出難題,研究無人機螺旋自主認知與改出控制方法。首先建立基于飛行狀態(tài)認知的無人機安全控制框架,在此基礎(chǔ)上進行無人機螺旋認知與改出控制器設(shè)計,分析螺旋成因,根據(jù)機載傳感器提供的實時飛行參數(shù)信息,采用直覺模糊統(tǒng)計判決與決策算法進行螺旋自主認知,最后考慮狀態(tài)變量控制時序,并設(shè)計非線性動態(tài)逆控制律,完成無人機螺旋改出的制導(dǎo)控制。仿真結(jié)果表明,相對于已有解決策略,所提出的控制方法可以顯著縮短螺旋改出所需時間,同時具有較好的動態(tài)響應(yīng)特性。
無人機;螺旋;認知;改出;安全控制;控制器;控制時序;非線性動態(tài)逆;統(tǒng)計;決策;動態(tài)響應(yīng);飛行狀態(tài);攻角;角速率;自主;飛行控制
在無人機全空域使用、飛行頻次不斷增加的情況下,其頻頻出現(xiàn)撞損、墜毀、失控等安全性事件,飛行問題日益凸顯[1]。Leveson在文獻[2-3]提出了系統(tǒng)安全性方法論,其中安全被看作是一個控制問題。無人機進入危險飛行狀態(tài)后,如不采取緊急避險控制,發(fā)生安全性事件的可能性較大,特別是無人機進入失速或者螺旋狀態(tài)。步入螺旋是尾旋的前期表現(xiàn),2012年6月,美軍1架“全球鷹RQ-4A”無人機在例行訓(xùn)練中進入螺旋,最終導(dǎo)致尾旋墜毀,這一事件引起了國內(nèi)外廣泛關(guān)注。因此,如何避免無人機進入螺旋和改出螺旋已成為確保無人機飛行安全所亟待解決的問題。
目前關(guān)于飛機螺旋的研究,主要集中在有人機領(lǐng)域。美國自20世紀50年代開始進行有人機螺旋改出研究,蘭利中心1957年寫的《近代飛機設(shè)計中尾旋研究現(xiàn)狀》中,提出了壓桿改出螺旋的設(shè)想和理論上的探討,在后續(xù)的飛行表演中,美國飛行員成功運用螺旋改出方法進行了失速和螺旋改出的表演;國內(nèi)針對有人戰(zhàn)斗機飛行特點,制定了一系列螺旋判斷及改出方法,形成了不同類型飛機的飛行規(guī)范和體制,如對殲六戰(zhàn)機,提出“平、中、順”方法是改出螺旋的最有效方法;文獻[4]探討了螺旋技術(shù)在飛行特技中的運用。
然而,國內(nèi)外對無人機螺旋研究比較少。俄羅斯“搜索”網(wǎng)站2008年12月24日報道:俄羅斯中央空氣流體動力學(xué)研究所正在開發(fā)避免無人機進入螺旋狀態(tài)的專業(yè)技術(shù);文獻[5]研究了方向舵卡死無人機步出螺旋的控制律設(shè)計,但其針對的是螺旋模態(tài)運動,并未考慮大迎角引起的不穩(wěn)定螺旋和尾旋;目前,尚未發(fā)現(xiàn)無人機螺旋改出控制的相關(guān)文獻與研究。
美國空軍研究實驗室技術(shù)領(lǐng)域?qū)<褺.T.Clough指出,自主化的控制是提高無人機飛行安全性的最有效措施[6]。在無人機螺旋改出控制中,實現(xiàn)自主化主要面臨以下幾方面的問題:①如何實現(xiàn)飛行狀態(tài)認知,進行及時有效的螺旋判斷;②如何把握控制器的控制時序,減少舵面的耦合作用,保證各個舵面效用的最大程度發(fā)揮;③如何設(shè)計良好的非線性控制律,以保證無人機在大迎角和非線性特性嚴重的狀態(tài)下,得到滿意的螺旋改出控制效果。
針對上述問題,本文提出基于飛行狀態(tài)認知的無人機自主安全控制框架,并在此基礎(chǔ)上設(shè)計螺旋認知與改出控制器。根據(jù)無人機螺旋特征,采用直覺模糊統(tǒng)計判決與決策算法進行螺旋認知,基于控制時序與非線性動態(tài)逆控制律,完成無人機螺旋改出的制導(dǎo)與控制,最后通過數(shù)值仿真驗證所提方法的有效性。
1 基于飛行狀態(tài)認知的無人機自主安全控制框架
1.1無人機自主安全控制框架
無人機自主安全控制,是指無人機在飛行過程中能夠依靠無人機系統(tǒng)的感知和認知計算功能,對即將或正在發(fā)生的飛行風(fēng)險進行感知、識別,并自主生成正確規(guī)避或者改出策略的控制方法。此方法是認知計算[7-9]在無人機導(dǎo)航控制系統(tǒng)中的具體應(yīng)用。
無人機利用機載慣導(dǎo)系統(tǒng)、高度計、GPS等傳感器對自身飛行參數(shù)信息進行測量,測量數(shù)據(jù)在感知層進行處理,感知層輸出的信息耦合到認知決策層進行更進一步的相關(guān)處理,通過與知識庫的信息進行匹配分析,實現(xiàn)對自身飛行狀態(tài)的認知,并結(jié)合任務(wù)和平臺特性產(chǎn)生相應(yīng)的制導(dǎo)決策指令,通過飛行控制系統(tǒng)驅(qū)動無人機規(guī)避或改出飛行風(fēng)險。無人機自主安全控制方法框架如圖1所示。

圖1 基于飛行狀態(tài)認知的無人機自主安全控制框架
由圖1可知,無人機自主安全控制主要包含以下3個部分:飛行狀態(tài)認知、自主決策和飛行控制。
1)飛行狀態(tài)認知
飛行狀態(tài)認知是無人機對來自數(shù)據(jù)鏈或機載傳感器的飛行參數(shù)信息(如速度、高度、姿態(tài)角以及姿態(tài)角速率等)的感知和識別,進而實現(xiàn)自身狀態(tài)理解與判斷。一般而言,這些信息具有大量性、多樣性以及復(fù)雜性。無人機將獲得的新信息(表現(xiàn)為短時記憶)與先驗信息(表現(xiàn)為長期記憶)進行數(shù)據(jù)融合,依據(jù)系統(tǒng)知識庫,對數(shù)據(jù)信息進行自主分析、理解與認知。
2)自主決策
當(dāng)認知無人機所處飛行狀態(tài)后,系統(tǒng)基于認知和決策知識庫做出決策,自主切換到對應(yīng)控制模塊,在此基礎(chǔ)上進行實時飛行態(tài)勢評估,準確把握系統(tǒng)的控制時序,并給定相應(yīng)的輸出。
3)飛行控制
針對每一種飛行狀態(tài),控制模塊包含相應(yīng)控制律,控制律設(shè)計主要考慮飛行狀態(tài)特征與操縱舵效。無人機在飛控系統(tǒng)作用下,逐步脫離危險飛行狀態(tài)。
1.2無人機螺旋認知與改出控制器結(jié)構(gòu)
根據(jù)上述無人機自主安全控制框架,設(shè)計的螺旋自主認知與改出控制器結(jié)構(gòu)如圖2所示。

圖2 無人機螺旋認知與改出控制器結(jié)構(gòu)
首先采用一定的方法認知無人機螺旋狀態(tài),根據(jù)螺旋狀態(tài)中的實時飛行參數(shù),從控制時序和控制律出發(fā),完成無人機的制導(dǎo)控制,實現(xiàn)無人機的安全飛行。
2 無人機螺旋認知
在實際飛行過程中,無人機面臨的飛行風(fēng)險狀態(tài)主要包含失速、偏離(變狀態(tài))、失速性滾轉(zhuǎn)、螺旋等[10]。因此,無人機進入非正常飛行狀態(tài)后,必須迅速判斷出飛機所處的風(fēng)險狀態(tài)類別,然后自主進行規(guī)避或改出的相應(yīng)操作。
2.1螺旋成因分析
螺旋是無人機進入失速后發(fā)生的同時繞自身三軸自動旋轉(zhuǎn),并沿著一條小半徑螺旋形軌跡急劇下降的一種非正常運動。無人機失速后發(fā)生的機翼自轉(zhuǎn)或方向發(fā)散是形成螺旋的根本原因。
1)機翼自轉(zhuǎn)
無人機機翼上的法向力系數(shù)Cz可表示為:

對于小型低速無人機,升力系數(shù)Cy較大,而阻力系數(shù)Cx較小,因此可以用升力系數(shù)分析大迎角滾轉(zhuǎn)阻尼的變化。
無人機進入大迎角飛行,當(dāng)產(chǎn)生滾轉(zhuǎn)時,下沉機翼迎角增大,升力系數(shù)反而減小,上揚機翼迎角減小,升力系數(shù)反而增大,此時機翼滾轉(zhuǎn)阻尼會發(fā)生變號,阻尼作用變成助滾作用,形成機翼自轉(zhuǎn)。
2)方向發(fā)散
無人機進入失速后可能產(chǎn)生機頭自動偏轉(zhuǎn)的現(xiàn)象,這是由于無人機喪失了方向靜穩(wěn)定性所致。無人機出現(xiàn)方向發(fā)散后,側(cè)滑引起兩翼的升力差使無人機在偏轉(zhuǎn)的同時發(fā)生滾轉(zhuǎn),偏滾中產(chǎn)生俯仰慣性力矩,將使無人機迎角進一步增大。
3)滾轉(zhuǎn)發(fā)散
滾轉(zhuǎn)發(fā)散通常發(fā)生在無人機處于負迎角飛行狀態(tài)下。在負迎角狀態(tài)下,橫側(cè)靜穩(wěn)定度時,無人機具有橫側(cè)靜穩(wěn)定性;當(dāng)超過負的失速迎角,即橫側(cè)靜穩(wěn)定度時,無人機喪失橫側(cè)靜穩(wěn)定性,此時易導(dǎo)致滾轉(zhuǎn)發(fā)散。
2.2螺旋認知方法
無人機進入螺旋飛行狀態(tài),飛行參數(shù)交叉發(fā)生劇烈變化,為了將無人機主觀知識庫與客觀世界的隨機性有機地結(jié)合在一起,采用直覺模糊統(tǒng)計判決與決策方法[11]進行螺旋認知。
設(shè)五元組{S,D,X,P(si),U(dj,si)},其中:S= {s1,s2,…,sn}是無人機飛行參數(shù)的集合,主要包含速度、高度、姿態(tài)角,姿態(tài)角速率等,D={d1,d2,…,dm}是飛行狀態(tài)判決決策集合,主要包含失速、偏離、失速性滾轉(zhuǎn)、螺旋等,X={x1,x2,…,xl}是追加的信息源,如系統(tǒng)誤差、環(huán)境擾動等,其中每一條信息xk(k=1,2,…,l)對si的影響,P(si)表示si發(fā)生的概率,U(dj,si)為評價函數(shù),即飛行參數(shù)為si時,判決為di取得的效果。

基于上述判決決策方案,即可判斷出螺旋與否,實現(xiàn)飛行狀態(tài)認知。
3 無人機螺旋改出控制
準確認知進入螺旋后,無人機切換到螺旋改出控制模塊,控制器根據(jù)實際的螺旋動態(tài),自主進行螺旋改出控制。
3.1狀態(tài)變量控制時序與給定輸出
無人機在失速飛行時,各個操控舵面存在耦合作用和位置約束,會出現(xiàn)舵面效用降低的情況[12-13],因此在螺旋改出過程中,很難對無人機系統(tǒng)中的各個狀態(tài)變量同時進行有效控制。有人機螺旋改出的實踐證明,比較有效的方法必須首先制止旋轉(zhuǎn)。如果帶著很大的旋轉(zhuǎn)角速率控制迎角,推桿產(chǎn)生的操縱力矩不足以克服較大的上仰慣性力矩,不僅迎角減不下來,反而會因為推桿產(chǎn)生的助滾、偏力矩,加快無人機旋轉(zhuǎn),同時姿態(tài)角的控制主要依靠副翼,而副翼在大迎角下的操縱效率偏低,因此控制姿態(tài)角的前提是無人機處于較小迎角狀態(tài)。
綜上所述,在改出螺旋過程中,必須準確把握控制時序問題,給定對應(yīng)輸出,以進行相關(guān)變量控制。這樣就可以防止螺旋更加發(fā)散,并最大限度發(fā)揮操縱舵面的作用。螺旋改出的控制時序如下:
Step 1 認知進入螺旋,切換至螺旋控制模塊,給定角速率輸出,進行減緩旋轉(zhuǎn)角速率控制;
Step 2 當(dāng)無人機偏轉(zhuǎn)與滾轉(zhuǎn)減慢后,給定迎角輸出,進行迅速減小迎角控制;
Step 3 當(dāng)迎角減小到臨界迎角以下,給定姿態(tài)角輸出,進行旋轉(zhuǎn)姿態(tài)角控制;
Step 4 無人機停止偏轉(zhuǎn)和滾轉(zhuǎn),達到期望姿態(tài)角,進行俯沖增速控制;
Step 5 當(dāng)速度增大到一定程度,執(zhí)行退出俯沖控制程序。
為研究簡便,當(dāng)無人機停止旋轉(zhuǎn)并達到期望姿態(tài)角,即可認為已經(jīng)完成螺旋改出。
3.2非線性動態(tài)逆控制律
無人機處于螺旋飛行狀態(tài)時,非線性特性特別明顯,為此在設(shè)計控制律時,不能在小擾動線性化的基礎(chǔ)上進行三通道獨立設(shè)計。在飛行器的設(shè)計中,使用較廣的方法是非線性動態(tài)逆控制[14,15],本文利用奇異攝動理論結(jié)合動態(tài)逆方法設(shè)計無人機非線性動態(tài)逆控制律。
無人機的六自由度模型[16]是包含12個狀態(tài)變量的非線性動力學(xué)系統(tǒng),12個狀態(tài)變量分別為

式中:p、q、r分別為滾轉(zhuǎn)角速率、俯仰角速率、偏航角速率;α、β、μ分別為迎角、側(cè)滑角、滾轉(zhuǎn)角;V、χ、γ分別為速度、偏航角、航跡傾斜角;X、Y、Z分別為無人機質(zhì)心位置在地面坐標系中的投影坐標。
根據(jù)無人機的運動規(guī)律和奇異攝動理論進行時標劃分,將狀態(tài)變量分成快速變量[p q r]T、中速變量[α β μ]T、慢速變量[Vχγ]T或[X Y Z]T,把無人機非線性方程組分解為3個不同時間尺度的子系統(tǒng)。大系統(tǒng)中各子系統(tǒng)之間按照時標分離的原則選擇不同頻帶,在此基礎(chǔ)上,使用狀態(tài)反饋型動態(tài)逆控制方法[17]可使三組狀態(tài)量的控制獲得一階線性解耦控制結(jié)構(gòu),而且3個快慢不同的回路可以獨立設(shè)計。
在無人機螺旋飛行與改出控制過程中,關(guān)心的只是快速變量與中速變量,因此主要進行快速回路與中速回路控制律設(shè)計,非線性動態(tài)逆控制律結(jié)構(gòu)如圖3所示。

圖3 非線性動態(tài)逆控制律結(jié)構(gòu)
1)快速回路控制律
快速回路主要實現(xiàn)對p,q,r的控制,即根據(jù)給定角速率輸入pc,qc,rc,求解控制舵偏量。快速回路方程寫為仿射形式,即為

式中,x1=[p q r],x為8個無人機狀態(tài)組成的向量,定義為

u是3個控制舵面偏角組成的向量,定義為

u是快速回路的輸出,同時也是無人機對象的控制量輸入。

式中,變量KP?、KI?、KD?為快速回路的PID反饋增益[18],其取值在20~30 rad/s。
則控制輸入u應(yīng)具有如下形式

結(jié)合無人機六自由度運動方程,展開(10)式,可得

式中

(7)式~(10)式結(jié)合在一起組成完整的快速回路,實現(xiàn)對無人機快速回路控制律設(shè)計。
2)中速回路控制律
中速回路主要實現(xiàn)對α、β、μ的控制,即根據(jù)給定姿態(tài)角輸入αc、βc、μc,求解輸出pc、qc、rc。忽略舵面偏轉(zhuǎn)產(chǎn)生的直接力,其對應(yīng)的無人機方程為
令快速回路期望角速率α□、β□、μ□的閉環(huán)動態(tài)響應(yīng)具有如下形式

式中,kα、kβ、kμ為中速回路的帶寬,其取值在5~10rad/s之間。
按動態(tài)逆思想得到控制指令輸出

結(jié)合無人機六自由度運動方程,展開(18)式,可得

式中

(17)式~(18)式結(jié)合在一起組成完整的中速回路,實現(xiàn)對中速回路控制律設(shè)計。
4 數(shù)字仿真及分析
仿真樣例無人機為以色列航空工業(yè)公司的IAI Pioneer小型無人機,具有固定翼翼型,其臨界迎角為30°。選擇高度2 000 m,巡航速度42 m/s的平飛狀態(tài)作為無人機的初始運動狀態(tài)。
仿真1 螺旋認知
首先在斷開螺旋改出控制模塊,即自動駕駛儀控制條件下,對無人機進入螺旋和螺旋認知進行仿真。
在初始狀態(tài)下,對無人機實施“大拉桿”操作,無人機姿態(tài)角與角速率變化如圖4a)~圖4c)所示。

圖4 無人機進入螺旋的動態(tài)過程
由圖4輸出結(jié)果,迎角發(fā)生周期性變化,均值大于臨界迎角。令Q1表示“無人機進入失速狀態(tài)”,Q2表示“無人機進入螺旋狀態(tài)”,Q3表示“無人機進入失速性滾轉(zhuǎn)”,Q4表示“無人機進入偏離狀態(tài)”;M1表示“迎角到達臨界角附近”,M2表示“偏航角速率增大”,M3表示“滾轉(zhuǎn)角速率較大且滾轉(zhuǎn)角大于某特定值”。
在t=4 s時,根據(jù)得到的條件概率,計算直覺模糊決策方案對直覺模糊時間的效用:
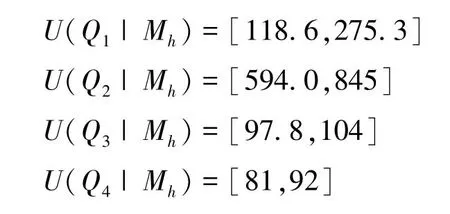
根據(jù)區(qū)間數(shù)比較方法,有

因此,無人機自主認知t=4 s時進入螺旋狀態(tài)。在t=60 s內(nèi),無人機三維飛行軌跡如圖4d)所示,可知,無人機螺旋自主認知結(jié)果與實際進入螺旋相符。
仿真2 自主改出控制方法(ARC)
在接通螺旋改出控制模塊條件下,對無人機改出螺旋進行仿真。
無人機初始運動狀態(tài)及其進入螺旋操作同上,在所設(shè)計的螺旋改出控制器作用下,無人機姿態(tài)角與角速率變化如圖5a)、圖5b)、圖6c)所示。
控制參數(shù)設(shè)置為:


圖5 無人機在ARC作用下的螺旋改出過程
由圖5可知,t=4 s時,無人機認知進入螺旋,自動切換到螺旋改出模塊并給定pc=0,qc=1,rc= 0,控制旋轉(zhuǎn)角速率;t=8.7 s時,無人機認知旋轉(zhuǎn)減慢,給定αc=5,βc=0,μc=50,控制迎角與姿態(tài)角;t =14 s時,無人機認知迎角變小,給定αc=4,βc=0,μc=0,t=19.8 s時,無人機停止旋轉(zhuǎn),達到期望姿態(tài)角,有效改出螺旋,即可進入退出俯沖控制模塊,其螺旋改出三維飛行軌跡如圖5d)所示。
仿真3 “平中順”改出控制方法(FMP)
當(dāng)無人機進入螺旋后,模擬地面操作人員,采用“平置方向舵,中立升降舵,順壓副翼”(“平中順”)方法進行螺旋改出控制,無人機姿態(tài)角與姿態(tài)角速率變化如圖6a)、圖6b)、圖6c)所示,螺旋改出三維飛行軌跡如圖6d)所示。

圖6 無人機在FMP作用下的螺旋改出過程
由圖6可知,“平中順”方法雖然也可以改出螺旋,但是該控制方法下的改出所需時間過長,這將導(dǎo)致無人機損失高度過大,從而引起墜毀。
仿真4 未考慮“控制時序”的自主改出控制方法(ARCNCS)
在無人機螺旋自主改出控制器設(shè)計中,不考慮狀態(tài)變量控制時序,直接給定期望輸出,在非線性動態(tài)逆控制律作用下進行螺旋改出控制,無人機姿態(tài)角與姿態(tài)角速率變化如圖7a)、圖7b)、圖7c)所示,螺旋改出三維飛行軌跡如圖7d)所示。

圖7 無人機在ARCNCS作用下的螺旋改出過程
由圖7可知,當(dāng)無人機螺旋自主改出控制不考慮“控制時序”時,改出時間延長,同時姿態(tài)角及角速度響應(yīng)出現(xiàn)振蕩,使得無人機在某個階段的螺旋特性更加復(fù)雜。
在ARC、FMP、ARCNCS 3種控制方法作用下,螺旋改出所需時間如表1所示。

表1 3種控制方法下的螺旋改出所需時間
從表1統(tǒng)計結(jié)果可以看出,3種控制方法均可以使無人機改出螺旋,但ARC方法具有最好的控制效果。
對上述4個仿真結(jié)果進行對比分析可知,本文采用的無人機螺旋認知方法能夠?qū)崿F(xiàn)對無人機進入螺旋狀態(tài)的認知,所提的自主改出控制方法能克服其他方法的缺點,較為有效地解決了無人機螺旋改出問題。
5 結(jié) 論
本文針對無人機螺旋改出問題進行研究,設(shè)計了無人機螺旋自主認知與改出控制器。提出基于飛行狀態(tài)認知的無人機自主安全控制方法,在此基礎(chǔ)上采用直覺模糊統(tǒng)計判決與決策算法認知螺旋,并從控制時序與控制律出發(fā),完成了螺旋改出的制導(dǎo)與控制。仿真結(jié)果驗證了所提控制方法的有效性,表明該方法可以及時完成螺旋認知,并顯著縮短改出所需時間,同時具有較好的動態(tài)特性。
[1] Loh R,Bian Y,Roe T.UAVs in civil airspace:safety requirements[C]//IEEE Aerospace and Electronic Systems,2009:5-17
[2] Leveson,N.Safeware:System Safety and Computers[M].Addison-Wesley,New Jersey,1995
[3] Leveson N.A New Accident Model for Engineering Safer Systems[J].Safety Science,2004,42(4):237-270
[4] 馬庭亮.螺旋技術(shù)在飛行特技中的運用探討[J].技術(shù)與市場,2011,18(7):91-92
Ma Tingliang.The Application Discussion of Spiral Technology on Aerial Acrobatics[J].Technology and Macket,2011,18 (7):91-92(in Chinese)
[5] 陳淑琴,趙文成,席劍輝.方向舵卡死無人機步出螺旋運動控制律的設(shè)計[J].電光與控制,2010,17(9):57-59
Chen Shuqin,Zhao Wencheng,Xi Jianhui.Control Law Designed for UAV to Step out Spiral Motion When Rudder Deadlock Happens[J].Electronics Optics&Control,2010,17(9):57-59(in Chinese)
[6] Clough B T.Unmanned Aerial Vehicles:Autonomous Control Challenges,a Researcher′s Perspective[C]∥2ndAIAA“Unmanned Unlimited”Systems,Technologies,and Operations,San Diego,California,2003
[7] Huang X,Huang H,Liao B,et al.An Ontology-Based Approach to Metaphor Cognitive Computation[J].Minds and Machines,2013,23(1):105-121
[8] Mark Bishop J,Erden Y J.Computational Creativity,Intelligence and Autonomy[J].Cognitive Computation,2012,4(3):209-211
[9] Squartini S,Hu S,Liu Q.Advances on Brain Inspired Computing[J].Cognitive Computation,2013,5(2):161-163
[10]Gomzin A V,F(xiàn)esenko E V,Shataev V G.Spiral Descent of an Unmanned Aerial Vehicle[J].Russian Aeronautics,2009,52 (3):277-283
[11]樊雷,雷英杰.直覺模糊統(tǒng)計判決與決策[J].控制與決策,2011,26(3):356-362
Fan Lei,Lei Yingjie.Intuitionistic Fuzzy Statistic Adjudging and Decision-Making[J].Control and Decision,2011,26(3):356-362(in Chinese)
[12]陳勇,董新民,薛建平,等.多操縱面飛控系統(tǒng)約束自適應(yīng)控制分配策略[J].系統(tǒng)工程與電子技術(shù),2011,33(5):1118-1123
Chen Yong,Dong Xinmin,Xue Jianping,et al.Constrained Adaptive Control Allocation for Multi-Effector Flight Control System [J].System Engineering and Electronics,2011,33(5):1118-1123(in Chinese)
[13]Dyhr J P,Morgansen K A,Daniel T L,et al.Flexible Strategies for Flight Control:an Active Role for the Abdomen[J].The Journal of Experimental Biology,2013,216(9):1523-1536
[14]Sieberling S,Chu Q P,Mulder J A.Robust Flight Control Using Incremental Nonlinear Dynamic Inversion and Angular Acceleration Prediction[J].Journal of Guidance,Control,and Dynamics,2010,33(6):1732-1742
[15]Shu Y,Tang S.Integrated Robust Dynamic Inversion Design of Missile Guidance and Control Based on Nonlinear Disturbance Observer[C]∥20124thInternational Conference on Intelligent Human-Machine Systems and Cybernetics,2012:42-45
[16]韓英華,范彥銘.基于非線性動態(tài)逆的無人機自動著陸控制系統(tǒng)[J].航空學(xué)報,2008,5(增刊):66-71
Han Yinghua,F(xiàn)an Yanming.Control System of Automatic Landing of UAV Based on Nonlinear Dynamic Inversion[J].Acta Aeronautica Astronauotica Sinica,2008,5(Suppl):66-71(in Chinese)
[17]Reiner J,Balas G J,Garrard W L.Flight Control Design Using Robust Dynamic Inversion and Time-Scsle Separation[J].Automatica,1996,32(11):1493-1504
[18]Du D J,F(xiàn)ei M R,Hu H S.Two-Layer Networked Learning Control Using Self-Learning Fuzzy Control Algorithms[J].Chinese Journal of Scientific Instrument,2007,28(12):2124-2131
Autonomous Cognition and Recovery Controller Design of UAV Spiral
Huang Hanqiao1,2,Zhao Xin1,Zhou Huan1,Wang Zutong1
1.Aeronautics and Astronautics Engineering College,Air Force Engineering University,Xi′an 710038,China 2.Northwestern Polytechnic University,Xi′an 710038,China
Aiming at dealing with the spiral recovery puzzle of aerial vehicles,we put forward an autonomous spiral cognition and recovery control method of the unmanned aerial vehicle(UAV).First of all,the safety control framework of unmanned aerial vehicles(UAV)based on flight state-cognition is built and the autonomous spiral cognition and recovery controller is designed.Then,the spiral factors are analyzed and the spiral state is recognized by using intuitive fuzzy statistic adjudging and decision-making algorithm according to timing flight variables information afforded by airborne sensors.Finally,the control scheduling of state variables is considered,and nonlinear dynamic inversion control laws are designed,which accomplish the guidance and control of the UAV spiral.Simulation results and their analysis suggest that,compared with the existing strategies,the proposed control method can decrease the time needed for spiral recovery evidently and meanwhile has good dynamic response characteristics.
aneroid altimeters,angle of attack,angular velocity,computer simulation,control,control surfaces,controllers,damping,data fusion,decision making,degrees of freedom(mechanics),design,drag coefficient,dynamic response,efficiency,electronic guidance systems,errors,fixed wings,flight control systems,frequency bands,global positioning system,inertial navigation systems,measurements,probability,real time control,safety engineering,scheduling,sensors,statistics,time series,unmanned aerial vehicles(UAV),velocity;cognition,control law,control scheduling,flight state,nonlinear dynamic inversion(NDI),recovery,safety control,spiral statistic adjudging.
V249
A
1000-2758(2015)06-0879-08
2015-02-18
國家自然科學(xué)基金(71501184)與航空科學(xué)基金(20155196022)資助
黃漢橋(1982—),西北工業(yè)大學(xué)校友、博士后,空軍工程大學(xué)講師,主要從事無人飛行器作戰(zhàn)系統(tǒng)與技術(shù)、無人作戰(zhàn)飛機自主攻擊技術(shù)等研究。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
