一種改進的非定常氣動力模糊邏輯建模方法
2015-10-22 09:41:11呂永璽章衛國王敏文史靜平
西北工業大學學報 2015年6期
呂永璽,章衛國,王敏文,史靜平,
(1.西北工業大學自動化學院,陜西西安 710072;2.飛行器一體化技術重點實驗室,陜西西安 710072)
一種改進的非定常氣動力模糊邏輯建模方法
呂永璽1,章衛國1,王敏文2,史靜平1,2
(1.西北工業大學自動化學院,陜西西安 710072;2.飛行器一體化技術重點實驗室,陜西西安 710072)
針對飛機過失速機動時氣動力和氣動力矩出現嚴重的非線性、耦合性和遲滯性等現象,提出了一種改進的模糊邏輯非定常氣動力建模方法。該方法基于大幅振蕩風洞實驗數據分析結果,充分考慮了影響飛機氣動力和氣動力矩的不同因素,通過二次型隸屬度函數將迎角、迎角導數、迎角二階導數、側滑角和縮減頻率等轉化為模糊輸入,將模糊規則計算出的氣動力和氣動力矩作為模糊輸出。與其他方法相比,該方法能夠對模糊邏輯模型的結構和參數統一辨識,通用性強,模型精度滿足給定的多層相關系數要求。最后,根據奇異攝動理論,設計了時標分離的動態逆控制律,采用了串接鏈方法實現過驅動系統的舵面偏轉分配。通過對比常規氣動力和非定常氣動力下典型的“眼鏡蛇”機動仿真結果,說明了過失速機動時建立精確非定常氣動力模型的必要性,也驗證了動態逆方法對于非線性系統有良好的控制效果。
過失速機動;非定常氣動力;模糊邏輯;動態逆;串接鏈
近距格斗是先進戰斗機超機動性能的標志,要求戰斗機在低速大迎角時仍能實現可控指令戰術機動動作——過失速機動。過失速機動時,機翼表面的氣體由單一的附著流動到旋渦流動、旋渦破碎直至發展為分離流動,氣體流動滯后和各部件渦系之間相互干擾比較嚴重,這些導致了飛機大機動時氣動力和氣動力矩的非線性、多軸耦合性和遲滯等特性。因此,傳統的氣動模型在大迎角時已不再適用,有必要建立精確的非定常氣動力模型。對于非定常氣動力的建模,文獻[1]總結的方法有代數多項式模型、Fourier函數分析模型、狀態空間模型、差分方程模型和模糊邏輯模型等,這些方法從不同角度分析了遲滯非線性現象的機理,所適用的情形各部相同,其中模糊邏輯建模方法通用型最強。模糊邏輯模型由Wang等[2]在1999年提出,該方法基于模糊數學原理,通過設置模糊輸入、模糊規則和模糊輸出等,來獲得非定常氣動力與飛機飛行狀態量之間的聯系。尹江輝等[3]討論了隸屬函數導數的連續性對模糊邏輯模型精度的影響。孔軼男等[4]利用振蕩三角翼的實驗數據建立了非定常氣動力的2種模糊邏輯模型:①采用減縮頻率進行建模;②考慮時間歷程對非定常氣動力的影響。這些方法不能指定模糊邏輯模型的辨識精度。
針對過失速機動的特性,直接采用非線性控制策略是必然途徑。在眾多的非線性控制方法中,動態逆方法的應用最廣,原因在于動態逆能使非線性和線性兼容,可以進行通道間解耦,無需復雜的增益調參,被控對象參數的改變不影響其線性解耦控制結構及其增益,是一種一般化的通用控制策略和方法。非線性動態逆方法[5]通過全狀態反饋和矩陣求逆,將原仿射非線性系統轉化線性系統,從而可用線性系統的控制理論進行控制設計。根據奇異攝動理論,將動態逆分為快回路和慢回路設計。張力等[6]依據逆系統理論對推力矢量飛機進行了適用于過失速機動和超敏捷性研究的控制系統設計。謝蓉等[7]應用動態逆設計飛行控制律,并采用PID控制補償由于未精確建模帶來的系統逆誤差。這些方法沒有考慮非定常氣動力,同時求解舵面偏轉時采用偽逆方法,沒有考慮舵面限制而且舵面分配效率比較差。
1 問題描述
以某型飛機大幅振蕩風洞實驗測量數據為例,選取機體系中法向力系數,其靜態測量數據和動態數據如圖1所示。

圖1 法向力系數隨迎角變化圖
圖中大幅振蕩時的迎角變化為:

式中,α0=40°為振蕩中心迎角,αm=40°為振蕩幅值,ω=2πf為振蕩角頻率,f為振蕩頻率,縮減頻率kω=2π·f·cA/V,cA為平均氣動弦長,V為飛行速度。
由圖中動態數據可知,當飛機在大迎角大機動時,迎角增加和減小所對應的氣動力系數差別很大,具有嚴重的非線性和遲滯性,并且這種差別與振蕩縮減頻率正相關。
給出常規氣動力計算如(2)式

由常規氣動力計算公式引申的簡單非定常氣動力模型為代數多項式模型[1]:

式中,如果Ci僅僅與α有關,那么

上式中的ai0可以通過最小二乘等方法計算得出。這種非定常氣動力的建模方法雖然簡單且和常規氣動力計算原理相近,但是其適用性很差,其代數項的個數針對不同的數據而不同,同時其建模精度也很差。
針對上述代數多項式模型的缺點,模糊邏輯模型憑借其通用性強的優點被廣泛利用。但是模糊邏輯在建模過程中精度時好時壞,有時不能夠滿足建模精度要求,因此本文針對模糊邏輯模型提出了一種改進的模糊邏輯建模方法。
2 模糊邏輯模型基礎知識
本文中采用的模糊邏輯模型主要包括4個元素:隸屬函數、內部函數、模糊規則和輸出單元[2]。
2.1模糊邏輯模型的隸屬函數
建立模糊邏輯模型的過程中最重要的是確定隸屬函數。以俯仰振蕩為例,輸入的模糊變量有:迎角、迎角的一階和二階導數、側滑角和縮減頻率,每個模糊變量的值分為多個空間,每個空間表示為一個隸屬函數,這樣為輸入變量提供了內部函數的隸屬度。輸入變量的范圍通過(4)式轉換到區間[0,1]。

本文中所選取的隸屬函數是具有連續導數的二次型形式。
2.2模糊邏輯模型的內部函數
本文中用內部函數代替了傳統的模糊集合關系矩陣,內部函數與輸入變量呈線性關系,形式如(5)所示:

式中,下標k為輸入變量的個數,yi為氣動力和氣動力矩,xi為輸入變量,,j=1,2,…,k:內部函數的系數,需要進行辨識。
2.3模糊邏輯模型的模糊規則
對于模糊模型輸入空間中的每個變量,可以選擇多個隸屬函數,這樣將輸入空間分為若干個模糊子空間。在模糊邏輯模型中,對每一個模糊輸入變量取一個隸屬函數就構成了一個模糊單元,從而第i個模糊單元的規則描述為:如果變量x1的隸屬函數為,x2的隸屬函數為,…,xk的隸屬函數為,那么這個模糊單元的輸出就是1.2節中給出的模糊單元的內部函數:對于每個模糊單元,均有一個內部函數來計算輸出,從而內部函數的個數等于模糊單元的個數。如果將輸入變量xi劃分為Ni個隸屬函數,那么總的輸出單元的個數:n=N1×N2×…× Nk。
2.4 模糊邏輯模型的輸出
模糊邏輯模型的輸出為所有模糊單元輸出的加權平均數。本文中每個單元的輸出權值設為隸屬函數等級的乘積值,由(6)式所示:

對于第j個輸入樣本(x1j,x2j,…,xkj),由模糊邏輯模型計算得到的輸出為:

式中,i=1,2,…,n表示第i個單元,n為模糊單元總數,j=1,2,…,m表示第j個樣本,m為數據樣本總數。
3 改進的模糊邏輯模型辨識算法
3.1模糊邏輯模型辨識相關知識
對于模糊邏輯模型的辨識,一般采用牛頓梯度下降法來辨識模糊邏輯模型的參數,借助正向搜索算法來辨識模糊邏輯模型的結構。
首先給出衡量所建立的模糊邏輯模型精度的均方差(S)和與多層相關系數(R2)的定義:


式中,αr是收斂因子,其取值范圍是(0,1)。采用當地均方差修正后,參數辨識公式如下:

3.2改進的模糊邏輯模型辨識算法
本文提出了一種統一的模糊邏輯模型辨識算法,該算法將模糊邏輯模型的結構和參數辨識統一,在辨識過程中只需要改變所要辨識的氣動力或氣動力矩類型,根據算法中的邊界和終止條件便可以得到最優的模糊邏輯模型結構和參數。本文中提出的辨識的算法具體步驟如下:

Step4 NG=NG+1,如果NG=5k則終止程序,否則每個模糊變量隸屬函數的個數根據循環嵌套增加,其他參數根據Step1中重新設置后轉入Step2。
4 動態逆控制律設計
考慮到非定常氣動力對飛機控制的影響,所以采用時標分離的非線性動態逆方法設計了快回路和較慢回路控制律。由于偽逆法不考慮舵面位置和速率限制等問題,因此在此采用串接鏈的分配方法來通過動態逆求取舵面偏轉值[8],具體實現:首先考慮氣動規舵面us=[δe,δa,δc,δqj,δhj],如果氣動舵面出現飽和或者舵效值不夠,則考慮矢量噴口ut= [δtx,δty]的偏轉,則動態逆內回路氣動舵面和矢量噴口的解算如下:
式中,函數P(·)表示舵面或矢量噴口偏轉限制,gs(x)為常規舵面的舵效矩陣,gt(x)為矢量噴口的效能矩陣。其結構圖如圖2所示:

圖2 基于串接鏈的動態逆內回路設計結構圖
對于較慢回路的控制律設計,則和通常情況下的動態逆設計一樣,將快回路作為內回路,將較慢回路解算出的指令作為內回路的參考輸入,這里不再給出設計過程。
5 仿真驗證
5.1改進的模糊邏輯建模結果
對于俯仰大幅振蕩,辨識結果如表1所示:(表中氣動系數是機體系中的力和力矩系數)

表1 常規模糊邏輯模型辨識結果

表2 改進的模糊邏輯模型辨識結果
由常規模糊邏輯辨識結果和改進以后的模糊邏輯辨識結果相比較,可知改進的模糊邏輯算法總能夠找到滿足精度要求(R2=0.995 0)的模糊邏輯結構和參數,并且每個變量的隸屬度函數個數少于常規模糊邏輯模型。
最終對于改進的非定常氣動力的模糊邏輯模型擬合結果如圖3至圖5所示。這里將改進的模糊邏輯建模結果和非線性代數模型相比較,可見模糊邏輯模型的建模精度比較高,對于振蕩數據的擬合程度較好。在計算時間方面,改進的模糊邏輯計算時間比非線性代數模型的計算時間明顯要長,但是由于實際應用中結構和參數都已經離線計算好,從而離散計算時間較長對于這種方法的應用無影響。因此,本文提出的改進模糊邏輯建模方法是很有工程應用價值的。

圖3 法向力系數辨識結構 圖4 軸向力系數辨識結果 圖5 俯仰力矩辨識結果
5.2“眼鏡蛇”仿真結果
由于非定常氣動力在大機動時才表現得很明顯,所以選擇“眼鏡蛇”大機動來驗證,其操縱規律如下:選擇初始狀態V=70 m/s,H=3 000 m,β,μ始終為0。期望的迎角αc在保持配平迎角飛行1 s后迅速增加到70°,保持1 s后迅速減小到配平迎角。
整個仿真結果和對比如圖6和圖7所示。第1種情況是考慮常規氣動力,第2種情況是考慮非定常氣動力。

圖6 “眼鏡蛇”動作跟蹤效果對比
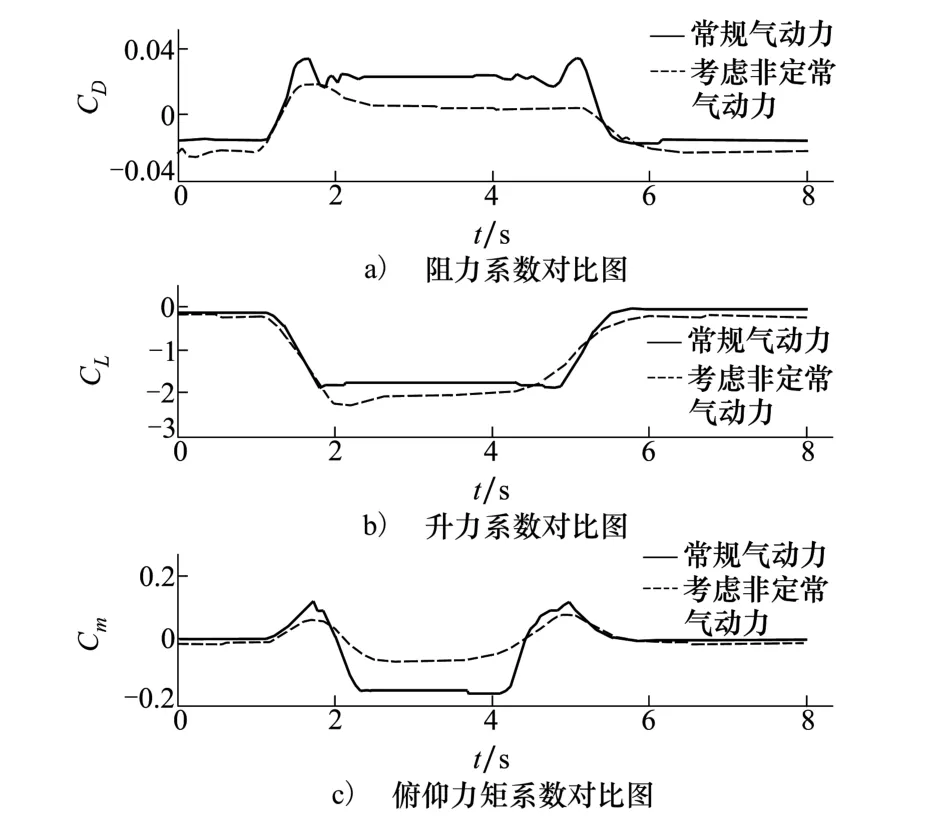
圖7 氣動力系數和氣動力矩系數對比
由圖6中仿真曲線可知:對于第2種情況,當期望迎角指令處于70°附近時,迎角跟蹤效果差,尤其是在迎角由70°快速變化到配平迎角時,非線性遲滯現象很明顯。這也導致了圖7中2種情況下氣動力和氣動力矩差別很大,其中第2種情況下升力系數的峰值達到了大幅振蕩風洞試驗數據的峰值。總體來看,第2種情況更加符合飛機實際飛行狀況。
6 結 論
本文針對過失速機動時氣動力和氣動力矩的非定常現象,提出了一種改進的非定常氣動力模糊邏輯建模方法,仿真結果表明該方法能夠對模糊邏輯模型的結構和參數進行統一辨識,模型精度滿足給定的多層相關系數要求,模糊變量隸屬函數的個數少,有利于工程實際中的應用。同時對于典型的過失速機動“眼鏡蛇”動作設計了基于串接鏈的動態逆控制律,使得多變量的非線性系統成為相互解耦的線性系統,取得了良好的控制效果,說明了過失速機動時考慮非定常氣動力更加符合飛機實際飛行狀況。
[1] 孫海生,張海酉,劉志濤.大迎角非定常氣動力建模方法研究[J].空氣動力學學報,2012,29(6):733-737
Sun Haisheng,Zhang Haiyou,Liu Zhitao.Comparative Evaluation of Unsteady Aerodynamics Modeling Approaches at High Angle of Attack[J].Journal of Aerodynamics,2012,29(6):733-737(in Chinese)
[2] Wang Z,Lan C E,Brandon J M.Fuzzy Logic Modeling of Nonlinear Unsteady Aerodynamics[R].AIAA-1998-4351
[3] 尹江輝,劉昶.非定常氣動力辨識的模糊邏輯方法[J].南京航空航天大學學報,2000,32(5):545-550
Yin Jianghui,Liu Chang.Fuzzy Logic Technique of Unsteady Aerodynamic Identification[J].Journal of Nanjing University of Aeronautics&Astronnautics,2000,32(5):545-550(in Chinese)
[4] 孔軼男,王立新,何開鋒,等.過失速機動的模糊邏輯建模仿真[J].北京航空航天大學學報,2007,33(10):1174-1177
Kong Yinan,Wang Lixin,He Kaifeng,et al.Fuzzy Logic Models for Unsteady Post Stall Maneuver[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(10):1174-1177(in Chinese)
[5] Snell S A,Nns D F,Arrard W L.Nonlinear Inversion Flight Control for a Supermaneuverable Aircraft[J].Journal of Guidance,Control,and Dynamics,1992,15(4):976-984
[6] 張力,王立新.推力矢量飛機控制律設計及過失速機動仿真研究[J].飛行力學,2008,26(4):1-3
Zhang Li,Wang Lixin.Research on Flight Control Law Design of Fighter with Vectoring Thrust and Post-Stall Maneuver Simulation[J].Flight Dynamics,2008,26(4):1-3(in Chinese)
[7] 謝蓉,王新民,李儼.超機動飛機動態逆-PID控制器設計[J].飛行力學,2009,27(2):67-71
Xie Rong,Wang Xinmin,Li Yan.Dynamic Inversion-PID Controller of a Supermaneuverable Aircraft[J].Flight Dynamics,2009,27(2):67-71(in Chinese)
[8] 史靜平,章衛國.基于AMS結構分析的串接鏈可達集求解與優化設計[J].西北工業大學學報,2012,30(4):582-588
Shi Jingping,Zhang Weiguo.An Efficient Optimization Method of Daisy Chain Control Allocation Based on Genetic Algorithm [J].Journal of Northwestern Polytechnical University,2012,30(4):582-588(in Chinese)
An Improved Fuzzy Logic Unsteady Aerodynamics Modeling Method
Lü Yongxi,Zhang Weiguo,Wang Minwen,Shi Jingping
1.Department of Automatic Control,Northwestern Polytechnical University,Xi′an 710072,China 2.Science and Technology on Aircraft Control Laboratory,Xi′an 710072,China
We aim at the severe nonlinearity,coupling and hysteresis of the aerodynamic forces and moments when an airplane has post-stall maneuver.The modeling method is based on large-amplitude oscillatory wind tunnel test data analysis results and considers various factors that influence the aerodynamic forces and moments.Then we use the quadratic membership function to transform the angle of attack and its first and second-order derivatives,yaw angle and reduced frequency into fuzzy inputs.The aerodynamic forces and moments calculated with fuzzy rules are used as outputs.Compared with other modeling methods,our modeling method can identify the structure and fuzzy logic model in a unitary way and is versatile.The precision of the model satisfies the requirements for given correlation coefficients.We design the time-scale dynamic and inverse control law according to the singular perturbation theory.We also use the Daisy-chain method to allocate the actuator′s deflection in an over-actuated system.The comparison of simulation results on the“Cobra”typical maneuver under normal and unsteady aerodynamic forces shows the necessity of establishing a precise unsteady aerodynamic model when an airplane has post-stall maneuver and verifies the good control effect of the dynamic inversion method on a nonlinear system.
aerodynamics,angle of attack,aircraft control,actuators,computer simulation,control surfaces,experiments,fuzzy logic,mathematical models,membership functions,wind tunnels;post stall maneuver,unsteady aerodynamics,dynamic inverse,daisy-chain
V249.1
A
1000-2758(2015)06-0971-06
2015-04-23
國家自然科學基金(61374032、51573486)與航空科學基金(20140753012)資助
呂永璽(1990—),西北工業大學博士研究生,主要從事飛行控制方法研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
