水下運動聲源的方位方差檢測方法
2015-10-26 10:11:13陳韶華趙冬艷鄭偉
應用聲學 2015年1期
陳韶華 趙冬艷 鄭偉
(中船重工集團公司第七一〇研究所 宜昌 443003)
水下運動聲源的方位方差檢測方法
陳韶華?趙冬艷鄭偉
(中船重工集團公司第七一〇研究所宜昌443003)
為了提高對水下運動目標的檢測能力,利用水下目標輻射信號與海洋環境噪聲在空間分布特性上的差異,提出了一種方位方差檢測方法。該方法采用時延估計法估計目標方位,對方位求方差以獲得檢驗統計量。采用奈曼-皮爾遜準則,推導了該方法的檢測概率關系式,得出了檢測性能與信噪比關系曲線,并與寬帶能量檢測方法進行了比較,表明該方法的性能遠優于寬帶能量檢測方法。理論分析和海上試驗結果都驗證了該方法的有效性。
水聲探測,方位方差檢測,寬帶能量檢測
1 引言
水聲探測系統需要在復雜干擾或噪聲背景中檢測微弱目標信號,提高其檢測能力是水聲信號處理孜孜以求的目標。經典檢測理論先進行過門限檢測,確認目標存在后再進行參數估計[1]。對于被動聲探測而言,高斯噪聲背景中未知高斯信號的最佳檢測器是波束形成+寬帶能量檢測,如果檢驗統計量過門限,則相應波束指示了目標的方向[2]。在海洋監測等工程應用中,由于平臺尺度的限制,經常采用只有幾個陣元的小型基陣,此時波束形成效果不明顯。
為了提高噪聲背景中的目標信號檢測能力,文獻[3]利用線譜來檢測目標,由于海洋聲信道的干涉效應與海洋聲傳播起伏等作用,目標的線譜并非始終穩定存在,因此線譜檢測方法通常需結合寬帶檢測進行[4]。文獻[5]利用航船螺旋槳噪聲循環平穩性來提高檢測性能。文獻[6]提出視在方位檢測器,利用信號場與混響場在空間分布上的差異,提高了主動聲納CW脈沖回波信號的檢測性能。
本文研究海洋環境噪聲背景中寬帶運動聲源的被動檢測問題,利用集中聲源與海洋環境噪聲在水平方位角上擴展的差異,以方位方差為檢驗統計量來檢測微弱目標信號。采用奈曼-皮爾遜準則分析了方位方差檢測的檢測概率與虛警概率,推導了檢測概率關系式,并把檢測性能與經典能量檢測方法作比較,表明了方位方差檢測的優越性。最后,采用海試數據驗證了理論分析結果。
2 方位估計原理
以平面四元陣為例,采用時延估計法來估計目標方位。設平面四元陣4個陣元的坐標分別為S1(d/2,0,0)、S2(0,d/2,0)、S3(-d/2,0,0)、S4(0,-d/2,0),如圖1所示。

圖1 平面四元陣定向示意圖Fig.1 Sketch map of bearing estimation with 4-sensor planar array
聲源的方位角與俯仰角分別為φ和θ,其中-π≤φ<π,是信號入射方向在xOy平面的投影與x軸的夾角,0≤θ<π是信號入射方向與z軸的夾角。
設陣元3到陣元1、陣元4到陣元2的時延分別為τ31與τ42。考慮遠場平面波的情況,可求解聲源方位角與俯仰角如下


由于時延τ42與τ31的統計誤差特征相同,不妨設其方差均為分析得到時延估計誤差引起的φ與θ的估計均方誤差為
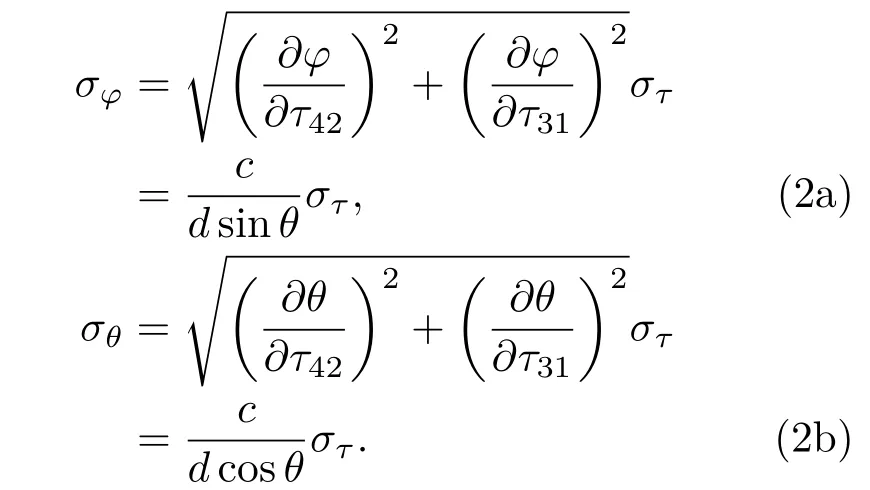
可見,測向誤差與陣元間距d、時延估計誤差στ及聲源俯仰角大小有關。增大陣元間距,提高時延估計精度,可以減小測向誤差。
時延估計的Cramer-Rao下限由下式決定[7]

其中,snr是功率信噪比,f2與f1分別是信號處理帶寬的上下邊界,T是積分時間。
3 海洋環境噪聲方位特性
海洋環境噪聲在不同的頻段有不同的來源和空間分布特性。在大約500 Hz到幾十kHz的寬頻帶上,測量點附近的海面波浪是主要噪聲源,噪聲垂直指向性最大值指向海面方向,而其水平指向性各向同性[8]。圖2是采用式(1)估計的實測海洋環境噪聲的方位角與俯仰角,分析頻帶1 kHz~3 kHz。可見,方位角在-180°~180°之間大致均勻分布,而俯仰角大約分布在0°~20°范圍內,指向基陣正上方即海面附近。對于目標而言,其方位角與俯仰角散布均較小,因此,利用目標與海洋環境噪聲在方位角散布上的差異,可以實現噪聲背景中目標的檢測。

圖2 海洋環境噪聲的方位角和俯仰角估計Fig.2 Azimuth(a)and pitch(b)angle estimation of ocean ambient noise
根據噪聲方位角分布,可以求出其均方誤差散布。噪聲的方位角φ在360°平面上服從均勻分布,即

式中,H0表示目標不存在。
可以求出噪聲引起的方位角估計方差

目標存在時,方位角估計方差由式(2)、(3)計算得到。
如圖3所示,處理頻帶1 kHz~3 kHz,積分時間0.2 s,可得到不同信噪比的目標方位角估計誤差,它隨信噪比提高而降低。作為比較,畫出了采用均勻分布仿真的海洋環境噪聲的方位角估計誤差,大約在103.9°附近,與理論分析相符。可以看出,即使在-20 dB的低信噪比下,目標引起的方位角估計均方誤差也遠小于各向同性海洋環境噪聲的均方誤差。

圖3 目標與海洋環境噪聲的方位估計均方誤差Fig.3 Root mean square error of bearing estimation of the target and ocean noise
在有些情況下,海洋環境噪聲不是各向同性的,比如在離港口或交通航線不太遠的地方,此時環境噪聲是一種分布式噪聲。根據文獻[9],分布式噪聲可以建模為在一個角度扇區內均勻分布。即把式(4)稍加修正

式中,φ0≤π。當φ0=π時,即為各向同性噪聲;當φ0<π時,是一種分布式噪聲。利用式(5),可以計算出分布扇區由2π減小到π/12時,分布式噪聲的方位均方差。可見,噪聲分布扇區越小,其方位均方差越小,這將引起噪聲背景中的信號檢測性能下降。如圖4所示,當分布式噪聲的分布扇區為30°時,噪聲方位均方差為8.7°。從圖3可知,為了使信號的方位估計均方誤差小于噪聲的方位均方差,輸入信噪比從各向同性噪聲時的-23 dB提高到約-13 dB。
不失一般性,下文將分析各向同性噪聲背景下的信號檢測性能,不同分布式噪聲背景下的檢測性能可以通過類似的分析方法得到。

圖4 分布式噪聲的方位均方差與分布扇區的關系Fig.4 Root mean square error of bearing estimation of distributed noise versus angular sector
4 方位方差檢測器及性能分析
根據目標或海洋環境噪聲的方位角方差分析,可實現噪聲背景中目標信號的檢測,稱為方位方差檢測器,這是一種恒虛警檢測器。檢驗統計量為

目標不存在時,
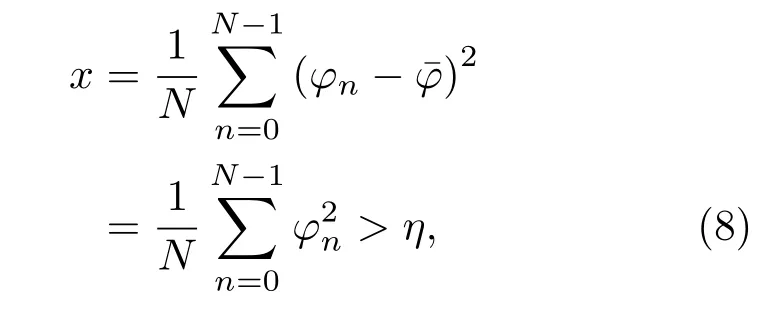
由于各向同性噪聲引起的φ1,φ2,···,φN相互獨立,它們的聯合概率密度函數為[10]

令

φ1,φ2,···,φN平方和的分布函數為


則y的概率密度函數為

虛警概率為
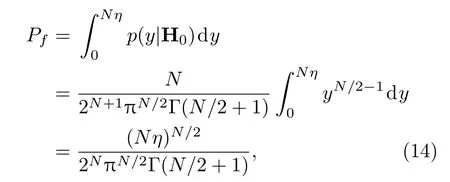
解得等效門限為

目標存在時,方位角估計φ近似服從高斯分布[6]

檢驗統計量等價于

y服從中心化X2分布,即

檢測概率為

式中,k!表示k的階乘。
圖5給出了方位方差檢測器的檢測概率與輸入信噪比的關系,虛警概率10-5,N=10,其余參數同圖3。同時,給出了寬帶能量檢測器[12]的檢測性能曲線。可見,方位方差檢測器的性能遠優于傳統的寬帶能量檢測器。

圖5 方位方差檢測與能量檢測性能比較Fig.5 Comparison between bearing variance detection and energy detection
5 海試數據分析
利用2010年1月海上試驗數據進行分析驗證。試驗采用平面四元陣,目標是一條科研試驗船。海深大約200 m,水下測量平臺深度約150 m,試驗時海況約3級,海底為淤泥底質。試驗海域附近沒有其它船舶,在所關注的頻帶內環境噪聲近似服從各向同性分布。基陣布放在水下平臺上,水下平臺內裝有數據記錄設備,目標由遠到近通過時的基陣輸出信號由數據記錄設備采集記錄,平臺回收后在計算機上處理數據。圖6是其中一個陣元接收到的目標通過前后的數據。

圖6 目標通過特性數據Fig.6 Waveform of target passage characteristic
圖7是對四元陣接收數據進行波束形成+寬帶能量檢測的結果,在0°方向形成波束。由于四元平面陣陣元數少,波束很寬,大約80°,波束形成的效果不明顯。根據寬帶能量檢測的ROC曲線,虛警概率10-4,設檢測概率為0.9,檢測閾為6 dB,大約在340 s處判決目標。

圖7 波束形成+寬帶能量檢測Fig.7 Beamforming and broadband energy detection
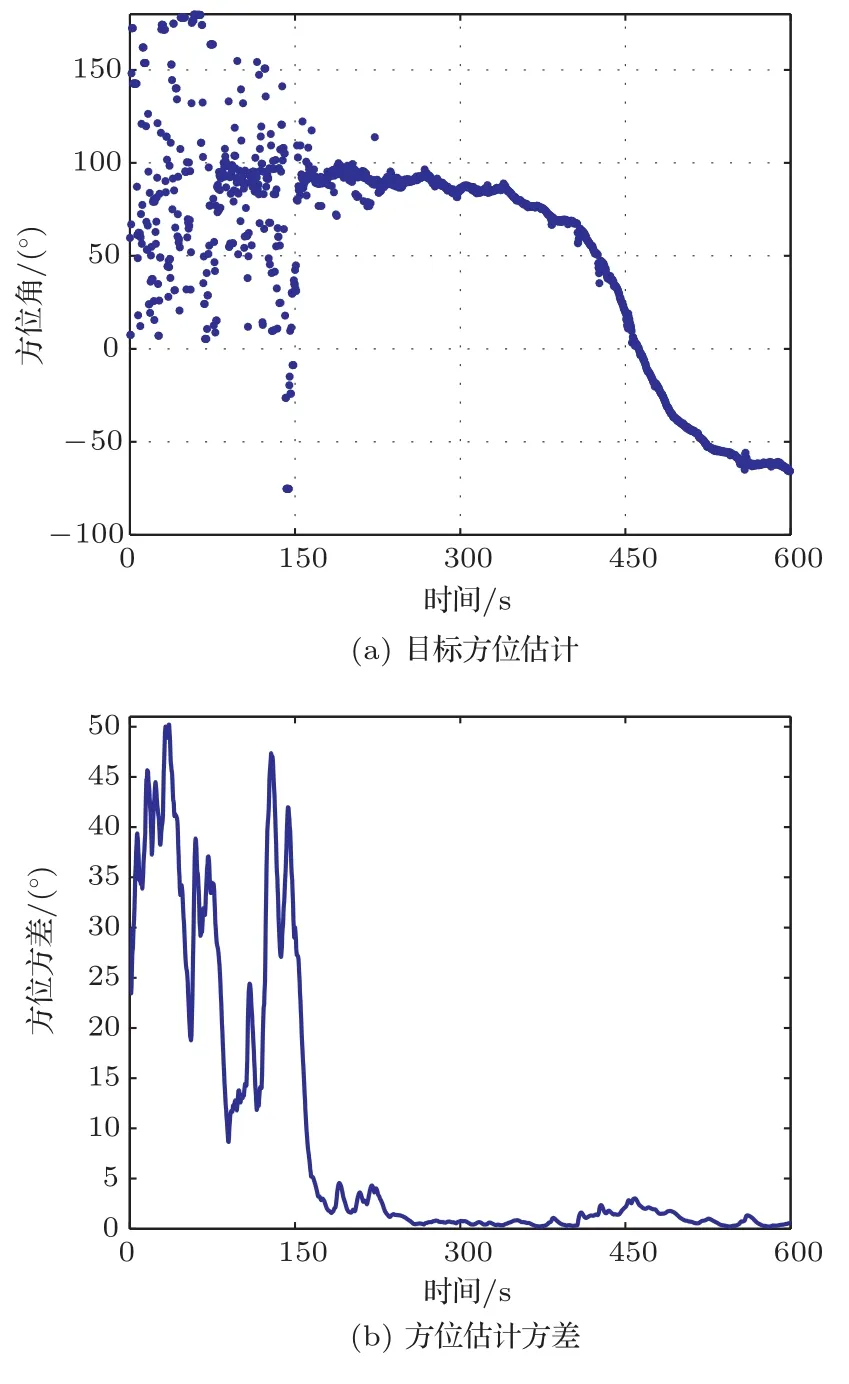
圖8 方位方差檢測器Fig.8 Bearing variance detector
圖8是目標方位估計與方位方差檢測器的處理結果,根據第4節的理論分析,虛警概率10-4時,檢測門限為5.2,方位方差檢測器在160 s可靠檢測目標,比波束形成+寬帶能量檢測提前了大約180 s檢測到目標。由圖6可見,在160 s時目標信號完全被噪聲淹沒,表明方位方差檢測器具有良好的微弱信號檢測性能。
6 結論
本文提出一種方位方差檢測方法,通過時延估計法估計目標方位角,根據方位角方差的變化實現運動聲源的檢測。理論分析表明,在小基陣條件下其性能遠優于傳統的波束形成+能量檢測器。海上試驗結果表明,方位方差檢測方法比能量檢測方法能提前約180 s檢測目標,具有更好的遠距離檢測能力。方位方差檢測方法充分利用了信號與環境噪聲在空間分布特性上的差異,提高了微弱目標檢測性能,實現也不復雜,適合在海洋監測小型化平臺上應用。由于小基陣的限制,目前該方法在存在多目標的情況下應用有困難,需要進一步研究。
[1]鄭兆寧,向大威.水聲信號被動檢測與參數估計理論[M].北京:科學出版社,1983.
[2]FILLINGER L,HUNTER A J,ZAMPOLLI M,et al. Passive acoustic detection of closed-circuit underwater breathing apparatus in an operational port environment[J].J.Acoust.Soc.Am.,2012,132(4):310-316.
[3]陳陽,王自娟,朱代柱,等.一種基于頻率方差加權的線譜目標檢測方法[J].聲學學報,2010,35(1):76-80. CHEN Yang,WANG Zijuan,ZHU Daizhu,et al.A detecting method for line-spectrum target based on variance-of-frequencyweight[J].ActaAcustica,2010,35(1):76-80.
[4]解愷,丁雪潔,孫貴青,等.基于目標輻射噪聲的信號起伏檢測算法研究[J].電子與信息學報,2013,35(4):844-851. XIE Kai,DING Xuejie,SUN Guiqing,et al.The signal fluctuating detection algorithm based on the target radiated noise[J].Journal of Electronics&Information Technology,2013,35(4):844-851.
[5]JEROME A,DAVID H.Detection of surface ships from interception of cyclostationary signature with the cyclic modulation coherence[J].IEEE J.Oceanic Eng.,2012,37(3):478-493.
[6]梁國龍,惠俊英,蔡平.視在方位序列分析[J].聲學學報,2000,25(2):134-141. LIANG Guolong,HUI Junying,CAI Ping.Pseudo bearing sequence analysis[J].Acta Acustica,2000,25(2):134-141.
[7]QUAZI A H.An overview on the time delay estimate in active and passive system for target localization[J].IEEE Trans.ASSP,1981,29(3):527-533.
[8]URICKRJ.Principlesofunderwatersound3rdedition[M].New York:McGraw-Hill,1983.
[9]PRABHAKAR S N,RAGHAVAN S.Direction of arrival estimation in the presence of distributed noise sources:Cumulant based approach[J].J.Acoust.Soc.Am.,1995,97(5):2997-3001.
[10]朱燕堂,趙選民.應用概率統計方法[M].西安:西北工業大學出版社,1997.
[11]LI S.Concise formulas for the area and volume of a hyperspherical cap[J].Asian Journal of Mathematics and Statistics,2011,4(1):66-70.
[12]KAY S M.Fundamentals of statistical signal processing,Volume II:Detection theory[M].NJ:Prentice Hall PTR,1998.
Bearing variance detection method for underwater moving sound source
CHEN Shaohua?ZHAO DongyanZHENG Wei
(No.710 R&D Institute,China Shipbuilding Industry Corporation,Yichang 443003,China)
In order to improve the detection capability of weak signal from underwater moving target,a bearing variance detection method is proposed by exploiting the difference in spatial distribution between underwater target radiated noise and ocean ambient noise.The time delay estimation method is applied to estimate the bearing of the target,getting the test statistics by resolving the variance of the bearings.The detection performance versus signal to noise ratio(SNR)of this detector is obtained and detection probability relation is derived based on the Neyman-Pearson criterion.The results show that its performance is far superior to the widely used broadband energy detector.Both theoretical analysis and results in sea trials show the effectiveness of our method.
Underwater acoustic detection,Bearing variance detector,Broadband energy detector
TB566
A
1000-310X(2015)01-0065-06
10.11684/j.issn.1000-310X.2015.01.010
2014-04-09收稿;2014-07-29定稿
陳韶華(1978-),男,湖北武穴人,高級工程師,研究方向:水聲信號處理。
E-mail:npuchen@163.com
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25