全電推進GEO衛星平臺發展研究
2015-10-28 02:17:40周志成高軍
航天器工程 2015年2期
關鍵詞:系統
周志成高軍
(1中國空間技術研究院通信衛星事業部,北京 100094)(2國家國防科技工業局,北京 100048)
全電推進GEO衛星平臺發展研究
周志成1高軍2
(1中國空間技術研究院通信衛星事業部,北京 100094)(2國家國防科技工業局,北京 100048)
介紹了國外電推進系統在地球靜止軌道(GEO)衛星上的應用階段,以及包括波音衛星系統-702SP(BSS-702SP)在內的主要全電推進衛星平臺;總結了全電推進衛星平臺在商業市場競爭、平臺技術創新、中型通信衛星市場需求方面的發展動因;提煉了全電推進衛星平臺涉及的大推力、高比沖、雙模式電推進系統,以及全軌道、小推力、自主變軌和位置保持等關鍵技術;提出了我國全電推進衛星平臺開發的目標及發展途徑。
通信衛星平臺;全電推進系統;小推力變軌
1 引言
美國波音衛星系統公司研制的全電推進地球靜止軌道(GEO)衛星亞洲廣播衛星-3A(ABS-3A)和歐洲通信衛星-115B(Eutelsat-115B),在2015年3月1日采用獵鷹-9火箭以“一箭雙星”的方式成功發射。當前,國際上已訂購的全電推進衛星有13顆,包括波音衛星系統公司的8顆,歐洲空中客車公司的3顆,俄德合資衛星制造商Dauria建造的2顆。此外,美國軌道科學公司、洛馬商業空間系統公司和勞拉空間系統公司,以及德國OHB公司等,也在開展全電推進衛星平臺的開發。我國也開始了全電推進衛星平臺的關鍵技術研究及平臺開發工作。全電推進衛星平臺主要指GEO衛星平臺,采用高比沖的電推進系統(如離子電推進或霍爾電推進等),實現星箭分離后的衛星轉移軌道變軌、衛星入軌后的軌道位置保持、動量輪卸載及離軌等任務,可取消復雜的雙組元統一化學推進系統。
全電推進GEO衛星平臺的最大優點是:可大幅縮減推進劑攜帶量,在承載同等有效載荷質量的情況下能使衛星發射質量降低約50%,使推進劑與衛星干質量比從約1.5降至約0.3,從而實現“一箭雙星”發射,有效降低綜合研制費用,顯著提升衛星平臺的市場競爭力[1]。其主要缺點是:由于變軌推力微小,需要較長的變軌時間,如全電推進GEO衛星平臺需要3~8個月的變軌時間,才能從地球同步轉移軌道(GTO)進入GEO,相對推遲了衛星的運營服務時間。
本文分析了國外全電推進衛星平臺的發展情況和發展動因,提煉了我國全電推進衛星平臺開發需要解決的關鍵技術,最后提出了我國全電推進衛星平臺開發的目標及發展途徑建議。
2 國外全電推進衛星平臺發展分析
2.1 電推進系統的應用階段
電推進系統的應用,主要在于節省衛星的推進劑攜帶量,從而有效降低衛星發射質量或提升有效載荷承載能力。以某在軌工作壽命15年的GEO衛星為例,衛星在西昌發射場發射,其軌道轉移、南北及東西位置保持、姿態控制等任務的速度增量需求如圖1所示,可見,電推進系統用于軌道轉移帶來的效益最大,其次是南北位置保持。

圖1 GEO衛星各階段任務的速度增量需求Fig.1 Velocity increment requirements of each flight phase of GEO satellite
電推進系統在GEO衛星上的應用經歷了循序漸進、由易到難、逐步深入的過程,先用于軌道位置保持,再擴展到變軌。
(1)電推進系統用于衛星軌道位置保持。從1995年開始,俄羅斯的MSS-2500-GSO衛星平臺就配置了霍爾電推進系統,用于衛星在軌位置保持。當前,國際上主流的GEO通信衛星平臺均配置電推進系統進行南北位置保持,如波音衛星系統公司的BSS-702平臺,洛馬商業空間系統公司的A2100平臺,勞拉空間系統公司的LS-1300平臺,泰雷茲-阿萊尼亞空間公司的空間客車-4000(Spacebus-4000)平臺,阿斯特里姆(Astrium)公司的歐洲星-3000(EuroStar-3000)平臺,此外還有ESA的“阿特米斯”(Artemis)衛星,俄羅斯的“快訊”(Express)通信衛星等。對于干質量2100 kg、工作壽命15年的通信衛星,采用電推進實現南北位置保持后,有效載荷承載質量可增加約300 kg。
(2)從軌道位置保持進一步擴展到軌道轉移和動量輪卸載等任務。在此階段,根據衛星的規模,有不同的應用方式:①對于大型GEO衛星(發射質量超過5000 kg),受電推力器推力的限制,先用遠地點化學發動機變軌到中間轉移軌道,再用電推力器完成變軌,以有效縮減推進劑攜帶量,從而突破衛星的有效載荷承載能力瓶頸,滿足大容量有效載荷的裝載需求。例如,基于A2100M平臺的“先進極高頻”(AEHF)衛星[2],采用電推進系統進行部分變軌和南北位置保持后,有效載荷承載能力提升約700 kg,但變軌時間延長為100 d。②對于小型GEO衛星(發射質量一般小于2500 kg),采用電推進系統實現全過程變軌、軌道位置保持和動量輪卸載、離軌等任務,即“全電推進衛星”。
2.2 主要衛星平臺
限于電推力器的推力水平和衛星姿態軌道控制要求,目前國際上主要針對GEO通信衛星市場需求提出了全電推進衛星平臺,取消了化學推進系統。美國和歐洲提出的GEO在軌服務衛星,也采用全電推進系統進行全過程變軌、軌道位置保持和軌道機動等任務。
1)BSS-702SP衛星平臺
2012年3月,波音衛星系統公司宣布正在開發中小型全電推進通信衛星平臺——BSS-702SP平臺[3],并已獲得亞洲廣播衛星(ABS)公司和歐洲通信衛星(Eutelsat)公司等多顆衛星的研制合同。這兩家公司的4顆衛星均選用獵鷹-9火箭采用“一箭雙星”方式發射。
BSS-702SP平臺本體尺寸為1.8 m×1.9 m× 3.5 m;發射質量不超過2000 kg,氙氣加注量可達400 kg;可承載500 kg有效載荷(51路轉發器),有效載荷功率為3~8 kW;衛星工作壽命15年。該平臺采用4臺XIPS-25氙離子推力器,單臺推力為165 mN,比沖為3500 s,功率為4.5 k W,變軌時需要2臺離子推力器同時工作。
BSS-702SP平臺在充分繼承BSS-702HP平臺成熟技術的基礎上(如超三結砷化鎵太陽電池陣、鋰離子蓄電池、零動量三軸控制技術),還采用了創新技術,如采用新一代綜合電子系統構架,簡化數據管理并增強衛星健康管理能力。
2)OHB公司全電推進衛星平臺
2013年10月,ESA及德國OHB公司與全球第二大衛星運營商SES公司簽訂協議,聯合開發全電推進衛星平臺——Electra平臺,其首顆衛星是一顆SES公司的衛星,計劃在2018年發射。Electra平臺基于德國OHB公司的SGEO(Small GEO,2009年首發)[4]平臺開發,發射質量為2~3 t,有效載荷質量為700 kg,有效載荷功率為8 k W,可替代現有的5 t發射質量的歐洲中型衛星平臺。
3)其他全電推進衛星平臺
2013年9月,洛馬商業空間系統公司宣布正在升級改造A2100平臺,其中一項重點內容就是進行全電推進衛星平臺改造,以支持“一箭雙星”發射,能采用更大推力的電推力器使衛星入軌時間比其他全電推進衛星縮減一半。另外,軌道科學公司計劃投資2500萬美元完成平臺升級任務,并開展星-3(Star-3)平臺的全電推進設計。阿斯特里姆公司、勞拉空間系統公司等也宣布已開展全電推進通信衛星平臺的開發。
由于全電推進GEO衛星平臺為輕小型平臺,具有發射成本低、構型配置靈活、有效載荷適應性強、能在軌長期自主運行等特點,因此國外論證的GEO在軌服務項目多采用電推進系統來實現GTO變軌和軌道位置保持,如歐洲的“軌道延壽飛行器”(Orbit Life Extension Vehicle,OLEV)、美國VIVISAT公司的“任務擴展飛行器”(Mission Extension Vehicle,MEV)等,從而降低發射質量,或可實現“一箭雙星”發射。GEO在軌服務衛星一般另配備1套簡單的化學或冷氣推進系統,用于快速軌道機動及姿態控制。
2.3 發展動因
全電推進衛星的快速發展,主要源于衛星市場競爭和衛星技術創新的驅動。
(1)全電推進衛星平臺首先來源于商業通信衛星市場的全系統低成本要求。采用電推進替代化學推進完成變軌和位置保持任務,是當前大幅降低高軌通信衛星發射質量或顯著提升衛星有效載荷承載能力、降低衛星研制費用的最有效途徑。波音衛星系統公司BSS-702SP平臺直接迎合了運營商的低成本要求,是在ABS和Satmex通信衛星競標中正式確定開發的。另一方面,采用“一箭雙星”發射可降低發射成本,如BSS-702SP平臺衛星采用獵鷹-9火箭“一箭雙星”發射,費用僅約6500萬美元,低于阿里安-5火箭(約1億美元)和質子號火箭(約8000萬美元),從而可大大降低項目的綜合運營成本。以基于BSS-702SP平臺的ABS-3A衛星為例,衛星裝載51路C、Ku頻段轉發器,單星價格約為1億美元,發射費用約為3250萬美元,每路轉發器價格僅為300萬美元,遠低于目前國際市場上每路轉發器500萬美元的平均價格,競爭優勢非常顯著。
(2)全電推進衛星平臺開發將促進衛星平臺的重大技術進步。目前,各衛星研制公司都在尋求衛星平臺技術的突破和升級改造,而全電推進衛星平臺將引發衛星系列技術的創新,促進衛星平臺的升級改造,能顯著提升衛星平臺的綜合能力,符合衛星平臺的創新發展要求。
(3)全電推進衛星平臺符合拓展中型商業通信衛星市場的需求。當前,國外研制的電推力器推力一般不超過300 m N、功率達到5000 W,需要2臺推力器同時工作進行軌道提升。因此,受電推力器推力和功率要求的限制,全電推進衛星平臺主要適用于中小型通信衛星(發射質量1500~2500 kg,有效載荷質量300~600 kg,有效載荷功率3~8 k W,裝載20~50路轉發器),既可用于新興市場的探索性開拓,也可用于接替在軌中型衛星,受到中小型通信衛星運營商的青睞。據統計,2015—2022年,國際上質量4200 kg以下中小型通信衛星的市場需求將占到41%,如表1所示。

表1 國際通信衛星發射情況預測Table 1 Telecommunication satellite launch forecast
3 我國全電推進衛星平臺發展方向分析
3.1 全電推進衛星平臺發展目標
1)全電推進衛星平臺的研制基礎
我國已完成了LIPS-200氙離子電推力器(推力40 m N)和HET-40霍爾電推力器(推力40 m N)的工程研制,并實現了在軌飛行驗證[5-7],已開展推力200 m N左右的大功率離子電推力器和霍爾電推力器的攻關研制[8];同時,已開展電推進通信衛星平臺的開發[9]。
2)電推進系統發展目標
衛星電推進系統的主要指標有比沖Isp、推力F、功率P和效率η等參數,其關系如下:F·Isp=2ηP。可見,電推進的推力與功率成正比,與比沖成反比。此外,變軌時間是全電推進衛星的重要指標,其與衛星推力具有密切的關系。以起飛質量為2000 kg的全電推進衛星為例,對于軌道傾角28°、近地點高度200 km、遠點地高度42 000 km的GTO,如果將變軌周期控制在6個月以內,要求電推進變軌點推力大于350 m N。
電推進性能指標及技術成熟度是影響其應用的首要因素,空間電源供電水平是影響電推進應用的第二個因素。綜合考慮各種因素,建議全電推進衛星平臺所用電推力器定位于:適應高軌衛星GTO變軌和GEO位置保持、離軌等任務要求,開發高功率、雙模式、高比沖電推力器,即推力(80~300 mN)、功率(2~5 k W)、比沖(1600~4000 s)可調的雙模式電推力器,其工作壽命為10 000~20 000 h。
3)全電推進衛星平臺開發目標
將全電推進衛星平臺作為技術跨越性平臺,開展創新性開發,打造技術先進、綜合性能指標高、承載比高、可靈活柔性配置的高軌衛星平臺。全電推進衛星平臺基本型的主要指標為:衛星發射質量為2000~2500 kg,整星功率為15~17 k W,有效載荷質量為500~700 kg,有效載荷功率為6~9 k W,壽命為16年。全電推進衛星平臺擴展型的主要指標為:衛星發射質量為2500~3500 kg,整星功率為17~22 k W,有效載荷質量為700~1200 kg,有效載荷功率為9~14 k W,工作壽命為16年。
全電推進衛星平臺主要支撐我國商業通信衛星研制,有效提升國內外通信衛星市場的競爭力;同時還可用于民用、軍用GEO通信衛星研制,提升衛星的綜合性能。此外,通過柔性配置,可擴展為全電推進遙感衛星平臺,支持高軌遙感衛星研制。全電推進衛星平臺適用于長征-3B火箭“一箭雙星”自身入軌發射、長征-3C火箭“一箭單星”自身入軌發射。
3.2 需要解決的關鍵問題
1)大推力、高比沖、長壽命、高可靠及雙模式電推進技術
全電推進衛星變軌過程需要2臺推力200 m N以上、比沖1800 s以上的推力器同時工作,以盡量短的時間和盡量少的推進劑進入GEO;衛星入軌后,有效載荷開機,使得電推進系統功率受限,位置保持需要電推力器以小功率(不超過3000 W)、高比沖模式進行工作。因此,要求電推力器具備大功率和小功率兩種工作模式。當前國內已鑒定的推力器只有單模式40 m N和80 m N推力,要加緊開展更大推力的雙模式電推力器研制。同時,全電推進衛星的變軌和南北位置保持工作時間長,且沒有化學推力器作為備份,要求電推進系統必須具備長壽命(大于10 000 h)和高可靠性。
對于電推力器,要突破高效電離放電室設計、高性能磁聚焦、長壽命空心陰極等多項關鍵技術;對于電源處理系統,要實現大功率高效率多模式電源、高壓切換繼電器等技術;對于推進劑貯供系統,須突破高精度大調節比電磁閥、高壓電子減壓閥等技術。此外,還要完成電推進系統優化設計、推力器配置布局及使用方案優化設計等;作為變軌和位置保持共用的電推力器,須完成具備大角度調節能力的矢量調節機構設計及驗證。
電推力器羽流會對衛星產生力、熱、刻蝕、污染和電磁兼容等多種影響,須通過充分的羽流試驗,并結合仿真系統開發,完成對羽流場和羽流效應的精確建模,實現對羽流影響的全面正確評估。
2)長周期、全軌道、小推力自主變軌及位置保持控制技術
全電推進轉移軌道變軌本質上是一個長周期小推力變軌問題。在小推力變軌過程中,衛星運行受到大氣阻力、地球扁率、光壓、日月引力等攝動影響,并與火箭入軌參數、衛星質量、變軌推力等密切相關,衛星運行圈數多,最優變軌策略難以確定[10]。選取合理的優化目標、約束條件和優化變量,采用有效的優化方法,考慮姿態控制及太陽翼指向控制等問題,開展變軌策略優化設計,是全電推進衛星任務設計的一大難點。
按照軌道優化理論,并考慮各類工程約束,變軌過程要分階段進行:第一階段,為減小大氣阻力影響,在軌道平面內盡快抬高軌道近地點;第二階段,進一步抬高軌道高度,同時減小軌道傾角;第三階段,在進一步減小軌道傾角的同時,調整軌道偏心率。變軌過程如圖2所示。
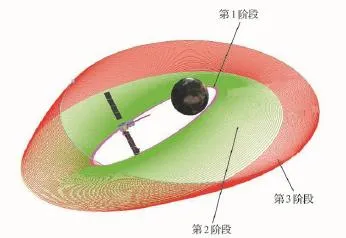
圖2 全電推進衛星變軌過程Fig.2 Orbit maneuver process of all-electric propulsion satellite
衛星小推力變軌過程中,為縮短變軌時間,幾乎全部軌道都在點火變軌,地面測控站難以全部覆蓋,要求衛星必須具備自主測定軌、自主變軌計算、自主姿態調整和自主生存能力,因此必須突破衛星在轉移軌道段復雜姿態情況下的自主導航技術和自主健康管理技術等。
衛星在軌運行過程中,由于推力小,電推進系統幾乎每天都處于位置保持工作狀態,全電推進衛星的位置保持策略設計具有自身的特點和難點;而且,為提高位置保持效率和電推進配置的工程實現性,南北位置保持和東西位置保持需要聯合控制,并在位置保持過程中同時實現動量輪的卸載,這就涉及位置保持及角動量卸載聯合控制的設計問題。如果衛星南北兩側各安裝2臺電推力器(見圖3),在正常模式下每天進行2次南北位置保持(升、降交點各1次),兼顧東西位置保持和動量輪卸載,見圖4。衛星在運行至升交點附近時,北側1臺電推力器(WN或EN)點火,位于北側的2臺推力器可以根據需要依次進行點火;衛星在運行至降交點附近時,南側1臺電推力器(WS或ES)點火,位于南側的2臺推力器可以根據需要依次進行點火。當同側2臺推力器中的1臺損壞時,用其他正常推力器可以完成南北位置保持,但推力器點火對偏心率的影響不會在升、降交點中消除,這時須采取故障點火模式,以實現全軌道控制。
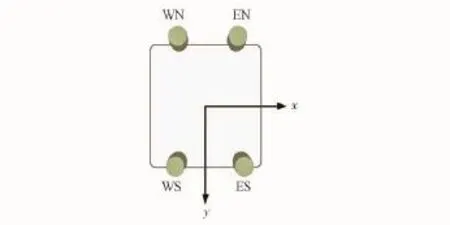
圖3 電推力器布局示意Fig.3 Electric thruster layout configuration
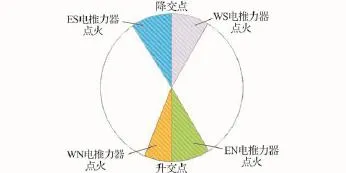
圖4 正常模式下位置保持點火策略Fig.4 Position keeping ignition strategy in normal model
3)適于“一箭雙星”發射的衛星構型結構設計技術
為提高經濟性,全電推進衛星主要考慮“一箭雙星”發射。國內外常用的“一箭雙星”發射方式主要有外支撐、內支撐和衛星自串聯3種,為提高對現有運載火箭的適應性,最大程度利用火箭運載能力,全電推進衛星更適于“一箭雙星”自串聯發射,BSS-702SP平臺即采用這種形式。因此,根據全電推進衛星平臺特點及“一箭雙星”自串聯發射約束,須完成具備高承載效率、柔性可配置的新型衛星構型設計、新型衛星主承力結構優化設計、雙星自身串聯接口設計、星箭接口優化設計和試驗驗證方案設計等。
4)高效電源和高效熱控技術
全電推進衛星的電推進系統功率需求較大,在變軌過程中約為10 k W,這對太陽電池陣提出了較高要求。另外,在長時間變軌過程中,衛星會反復穿越地球輻射帶,太陽電池陣的輻射總劑量會有所增加,導致太陽電池陣的衰退率增大。經分析,當玻璃蓋片厚度為0.12 mm時,三結砷化鎵太陽電池的輻射衰降因子約為80%。因此,必須研究采用更高效的太陽電池(如超三結或四結砷化鎵太陽電池等),并適當增加玻璃蓋片厚度,以提高太陽電池陣的輸出效率。
在全電推進衛星熱控技術上,由于衛星在變軌過程中有效載荷不開機,加熱功率需求較大,因此須研究智能熱控措施,以有效降低轉移軌道段的加熱功率;同時,全電推進衛星一般為中小型衛星,本體尺寸較小,在有效載荷開機后,自身散熱面積有限,因此必須研究采用新型、高效、智能的散熱措施。
5)星箭全系統優化設計技術
全電推進衛星的綜合效益體現在星箭匹配優化設計上。全電推進衛星的最大優勢在于發射質量縮減一半,可采用“一箭雙星”發射或采用小型運載火箭進行單星發射。為充分發揮我國全電推進衛星平臺的應用效益,必須基于已有或在研的運載火箭開展適用“一箭雙星”發射整流罩的開發。衛星的長周期、小推力變軌策略分析結果表明,星箭分離點的遠地點高度對全電推進衛星的變軌時間影響較大,因此須開展星箭分離點參數的優化設計,以取得最佳效益。
4 結束語
全電推進衛星平臺是較大限度提升衛星荷載比、充分發揮衛星平臺承載能力、提升衛星平臺綜合性能的有效途徑,可顯著提升通信衛星的國際市場競爭力,符合先進衛星平臺創新的迫切性要求。結合我國GEO衛星發展對電推進技術的需求,并考慮電推力器的研制進展,借鑒美國波音衛星系統公司和德國OHB公司的全電推進衛星平臺發展模式,制定我國電推進衛星平臺發展路線,全面提升衛星平臺能力和國際市場競爭力。
(1)以市場需求為牽引,在完成現有電推進衛星平臺(采用電推進系統完成在軌位置保持)研制的基礎上[9],同步開展全電推進衛星平臺研制,同時牽引多模式、高功率電推力器發展,促進電推力器的技術成熟及進一步推廣應用。
(2)在科研技術攻關方面,須進一步聚焦關鍵技術,集合優勢力量,加大投入,突破長周期、小推力自主變軌控制、電推進在軌位置保持控制等關鍵技術,開展支持雙模式、百毫牛級電推力器的攻關研制和驗證。
(3)在能力建設方面,積極推進電推力器型譜化等基礎能力建設;同時,市場開拓與衛星平臺開發同步開展,并加強國際對標,提高市場競爭力。
(
)
[1]M Konstantinov.The analysis of influence of electrical propulsion characteristics on efficiency of transport maneuvers[C/OL].[2014-12-20].http://erps.spacegrant.org/uploads/images/images/iepc_articledownload_ 1988-2007/2007index/IEPC-2007-212.pdf
[2]Defense Industry Daily.Next-stage C4ISR bandwidth: the AEHF satellite program[EB/OL].[2014-12-20].https://www.defenseindustrydaily.com/nextstagec4isr-bandwidth-the-us-militarys-aehf-program-updated-02165/
[3]Steven A Feuerborn1,David A Neary,Julie M Perkins.Finding a way:Boeing's“All electric propulsion satellite”[C]//Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference.Washington D.C.: AIAA,2013:1-5
[4]H Lübberstedt,A Schneider,H Schuff,et al.Development of the European small geostationary satellite SGEO[C]//Proceedings of the IAA Symposium on Small Satellite Systems and Services(4S).Stockholm: IAA,2008
[5]周志成,王敏,李烽,等.我國通信衛星電推進技術的工程應用[J].國際太空,2013(6):40-45 Zhou Zhicheng,Wang Min,Li Feng,et al.Engineering application of electric propulsion technology in China's telecommunication satellite[J].Space International,2013(6):40-45(in Chinese)
[6]張天平,田華兵,陳娟娟.LIPS-200離子推力器壽命地面試驗方案研究[J].航天器工程,2012,21(4):111-116 Zhang Tianping,Tian Huabing,Chen Juanjuan.A study of LIPS-200 ion thruster life test on ground[J].Spacecraft Engineering,2012,21(4):111-116(in Chinese)
[7]張志遠,田楊,王平陽,等.霍爾推力器壽命實驗和計算分析[J].火箭推進,2014,40(3):16-22 Zhang Zhiyuan,Tian Yang,Wang Pingyang,et al.Experiment and calculation analysis of Hall thruster lifetime[J].Journal of Rocket Propulsion,2014,40(3): 16-22(in Chinese)
[8]孫明明,張天平,王亮.30 cm口徑離子推力器熱特性模擬分析[J].真空與低溫,2014,20(3):158-162 Sun Mingming,Zhang Tianping,Wang Liang.Thermal analysis of 30 cm diameter thruster[J].Vacuum& Cryonenics:2014,20(3):158-162(in Chinese)
[9]Zhong Xiaoqing.Electric propulsion DFH-3B communications satellite platform[J].Aerospace China,2014,14(4):17-18
[10]Ronald L Corey,Nicolas Gascon,Jorge J Delgado,et al.Performance and evolution of stationary plasma[C]//Proceedings of the 28th AIAA International Communications Satellite Systems Conference(ICSSC-2010).Washington D.C.:AIAA,2010:1-20
(編輯:夏光)
Development Approach to All-electric Propulsion GEO Satellite Platform
ZHOU Zhicheng1GAO Jun2
(1 Institute of Telecommunication Satellite,China Academy of Space Technology,Beijing 100094,China)
(2 State Administration of Science,Technology and Industry for National Defence,Beijing 100048,China)
The development stage of electric propulsion system and the main all-electric propulsion GEO satellite platforms including BSS-702SP are introduced.The development motivations of allelectric propulsion satellite platform are summarized including the commercial market competition,platform technical innovation,and market demand for medium-sized telecommunication satellites.The key technologies of all-electric propulsion satellite platform are refined such as high thrust,high impulse,dual mode electric propulsion system,the whole orbit and low-thrust autonomous orbit maneuver,and position keeping.Finally,the paper proposes the development target and the approach of China's all-electric propulsion platform.
telecommunication satellite platform;all-electric propulsion system;low-thrust orbit maneuver
V423.4
A DOI:10.3969/j.issn.1673-8748.2015.02.001
2015-01-14;
2015-03-10
周志成,男,研究員,研究方向為航天器總體技術。Email:zhouzhicheng@cast.cn。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
