SMA彈簧集群驅動控制與動態特性研究
2015-10-28 09:49:48應申舜計時鳴蔡東海艾青林
中國機械工程 2015年10期
應申舜 計時鳴 蔡東海 艾青林
浙江工業大學特種裝備制造與先進加工技術教育部重點實驗室,杭州,310032
SMA彈簧集群驅動控制與動態特性研究
應申舜計時鳴蔡東海艾青林
浙江工業大學特種裝備制造與先進加工技術教育部重點實驗室,杭州,310032
研究了SMA彈簧集群的驅動控制與動態特性。在分析生物骨骼肌微觀結構特性的基礎上,建立了3行5列的陣列結構SMA彈簧集群及驅動控制實驗平臺。基于數理統計理論,建立了SMA彈簧集群驅動開關控制方法,利用ADAMS軟件對SMA致動器集群的位移和力特性進行了仿真分析。設計了基于PLC的集群控制硬件平臺,利用組態王軟件建立了集群控制圖形用戶界面,給出了SMA彈簧集群的激活控制法則,獲得了SMA彈簧集群的張力時間歷程,在此基礎上研究了不同的SMA彈簧激活組合對輸出力特性的影響。實驗表明,SMA致動器集群存在嚴重的耦合特性。最后討論了致動器集群輸出力的振蕩特性及振蕩消除方法。
致動器; 形狀記憶合金; 仿生驅動控制; SMA彈簧集群
0 引言
目前對人工肌肉集群的驅動控制還側重于對單個致動器的控制研究。例如Osswald等[8]研究了仿人機器手臂的控制和仿人機器人的控制。Mosley等[5]雖然提出并建立了SMA絲集群機構,但尚未建立有效的驅動控制方法。Ueda等[9]基于指紋算法和隨機方法,對PZT蜂窩致動器控制方法的理論研究,具有較高的理論價值,但是尚無實例驗證。
SMA彈簧致動單元在被事先拉長,給其通電條件下,其Ni-Ti彈簧會在熱能作用下產生相變并收縮,進而回復到初始長度,輸出一定大小的力和位移。相比于PMA、CP和DE等功能材料及致動器,SMA彈簧具有能量密度高、變形量大等優點,缺點是響應速度較慢,特別是增大SMA絲徑以獲得較大輸出力時,將顯著降低其響應速度。若采用集群結構,則有望解決上述問題。本文首先模擬生物骨骼肌驅動特性設計了一種SMA彈簧集群,然后研究了基于隨機理論的SMA彈簧集群開關控制方法,仿真分析了SMA彈簧集群的輸出特性,并對SMA彈簧集群控制系統的設計與實現展開了研究,最后給出了初步的實驗驗證結果。
1 SMA彈簧集群仿生設計
骨骼肌包含大量彈性肌纖維,肌纖維在神經沖動刺激下收縮產生運動。肌肉的收縮即為肌動蛋白相對于肌球蛋白滑移的結果。目前被廣泛接受的肌肉力產生機理是這些肌絲直接以橫橋形式連接的結果。肌肉的強度取決于這些肌纖維的長度[10]。模仿生物骨骼肌的運動機理和組成結構,設計人工肌肉集結群的整體結構,可將人工肌肉集群劃分成若干階梯狀分布的肌纖維和細胞單元,如圖1所示。細胞單元對應于骨骼肌的肌小節。這些細胞單元通過串聯形成肌纖維,若干肌纖維通過并聯進而形成人工肌肉集群。
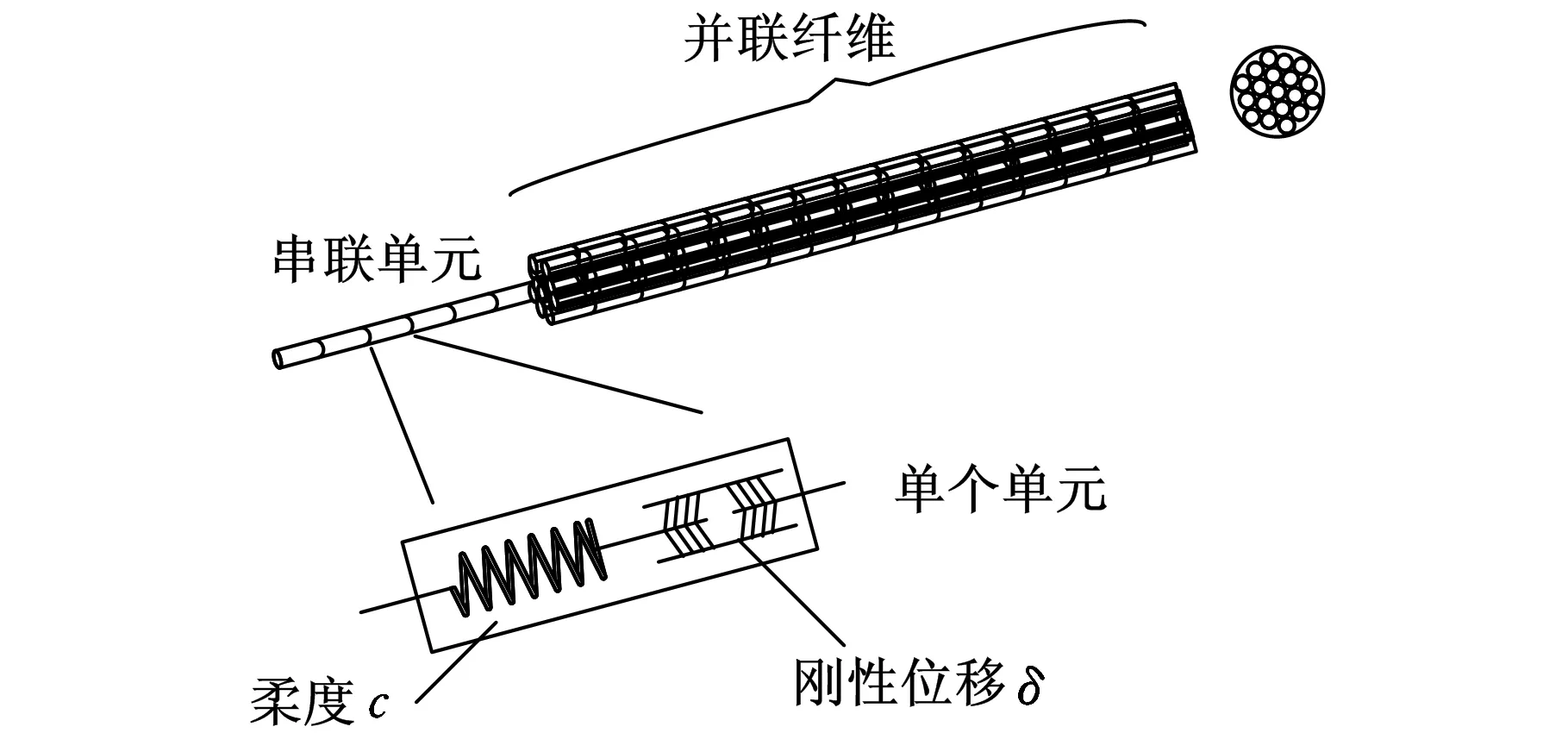
圖1 人工肌肉集群示意圖
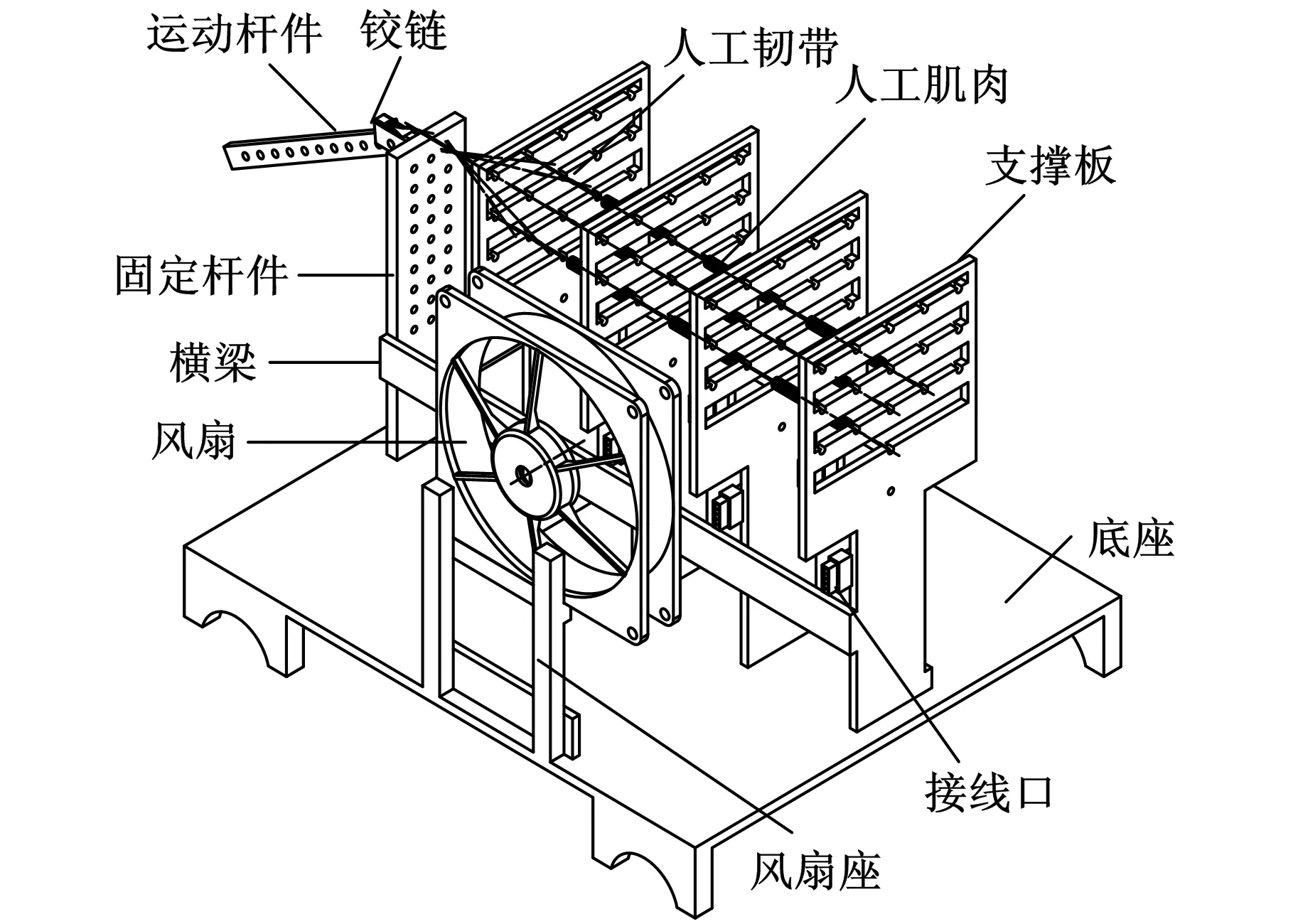
圖2 SMA彈簧集群及實驗平臺
設計的人工肌肉集群及附著平臺如圖2所示。主要包含SMA彈簧、人工韌帶、底座、運動測試機構(包括固定桿件、運動桿件、鉸鏈)、散熱模塊(包含風扇和風扇座)、人工肌肉附著平臺(包含橫梁、支撐板、接線口)。人工韌帶采用燃點較高的尼龍絲,用于連接SMA彈簧及連桿,模擬韌帶的功能。底座為其他一切組件提供支撐。散熱模塊為人工肌肉群降溫。人工肌肉附著平臺由一組結構尺寸相同的支撐板、一組相同規格的接線口以及橫梁組成。每個支撐板上還固定了一個接線口,用于人工肌肉供電線路的布線以及與控制模塊的連接。運動測試機構連接右側的肌群,用于測試肌群的輸出位移和輸出力。
為減小肌群收縮的內部摩擦和熱-電耦合,應合理選擇支撐板陣列的間隔距離、人工肌肉及連接韌帶長度,當SMA彈簧拉長或者收縮時,使連接韌帶都搭在各個通孔上。
2 SMA彈簧集群驅動控制方法
Ni-Ti形狀記憶合金材料具有形狀記憶效應,能在熱能作用下回復到初始形狀[11]。SMA彈簧事先被拉長,通電后收縮,就會輸出一定大小的力和位移。每個SMA彈簧有兩種狀態:收縮,或開狀態(ON state);松弛,或關狀態(OFF state)。可用一個很小的固定位移δ串聯一個很小的柔度c來表示[12]。δ和c的值隨著致動單元的狀態而改變,可表示如下:
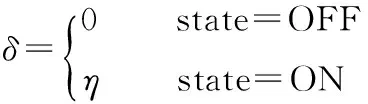
(1)
(2)
由各個SMA彈簧致動單元位移的有效平均值可預測該串并聯致動器陣列的整體位移。根據處于ON狀態的致動單元數目Non,可由一個簡單的表達式表示致動器陣列的整體位移和剛度。對于一組串聯的SMA彈簧致動單元,其純位移和柔度分別等于該串聯機構內各SMA彈簧致動單元的位移和柔度的和,即
(3)
(4)
y≈ηNon/M+FdC
(5)
其中,Fd為外部干擾力;C為致動器陣列的整體柔度,它約等于每個串聯機構的柔度的均值,即
C≈[(N/M)coff+(Non/M)(con-coff)]/M
(6)
串聯機構經過的并聯組合產生SMA彈簧集群的整體純力輸出,其值約等于各個串聯機構的力之和,即
(7)
按照上述算法,控制不同位置、數目的SMA彈簧致動單元的通斷,即可獲得相應的力、位移輸出。由于上述方法基于數理統計理論,因此適用于具有較大規模的SMA彈簧集群。
3 SMA彈簧集群動態特性仿真分析
3.1位移仿真
本文利用ADAMS仿真軟件對人工肌群進行仿真。首先,用彈簧阻尼單元模擬SMA彈簧,用小段圓柱剛體單元模擬彈簧之間的尼龍線,建立3行5列陣列結構的SMA彈簧集群多體動力學模型。為簡化分析,主體框架省略,忽略彈簧之間的位置關系,在同一平面上排布。SMA集群模型一端固定,另一端連到一個連桿上,連桿位移即整體輸出位移。然后,添加約束,限制連桿自由度,使其只在彈簧收縮方向上運動,即在彈簧和地面之間添加一個滑動副。在連桿上添加一個力,力大小待定,方向與彈簧收縮方向相反。重力作用方向和肌群動作作用方向垂直,對肌群輸出影響不大,在模型中直接去除重力。最后,運算求解,SMA彈簧由于磁滯現象,從冷卻狀態到加熱狀態有一個過程,并且有少量變形,仿真時忽略不計,僅考慮彈簧由伸長狀態到收縮狀態的記憶回復過程。在仿真中,設置兩種彈簧剛度和預載力來表示彈簧的收縮和松弛兩種狀態。現假設收縮狀態下彈簧剛度為1 N/m,彈簧初始長度為40 mm,預載力為20 N;伸長狀態下彈簧剛度為0.3 N/m,初始長度為40 mm,預載力為0。阻尼系數都設為0.8,負載力設為1 N。
實際情況下3×5陣列的肌群彈簧有56種組合狀態,但在仿真情況下,當一組(或相同變形量的幾組)彈簧位移量大于其他各組時,其他各組彈簧“被松弛”,對位移輸出量沒有貢獻。僅僅考慮收縮量最大的一組(或相同變形量的幾組)的整體彈簧剛度和位移輸出即可,因此基于上述仿真模型,選取56種組合中有效的幾組進行仿真,共計16種情況。表1列舉了部分仿真結果。
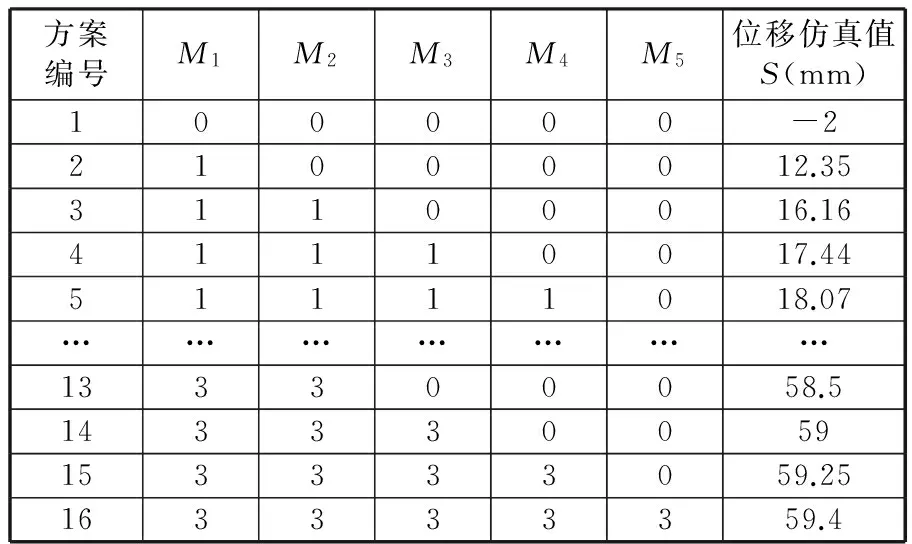
表1 位移仿真結果數據
圖3所示為10號方案下,位移隨時間變化情況,此位移變化過程彈簧剛度恒定。實際情況下,形狀記憶合金彈簧剛度隨溫度變化而變化,仿真過程中的最終穩定值為最終輸出,表1中給出的仿真結果為穩定值。
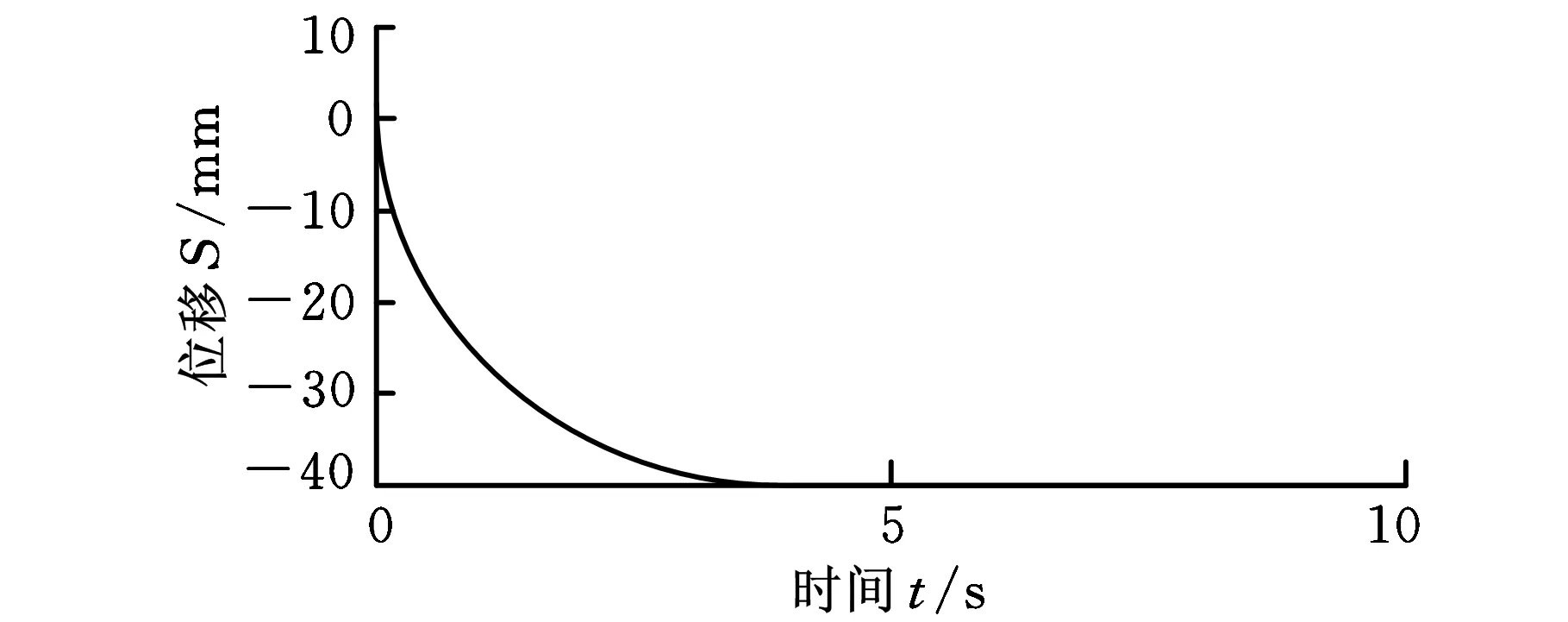
圖3 方案10的位移仿真曲線
3.2力仿真
力仿真建模方法與位移仿真中建模方法一樣。預載力全都增加0.2 N作為拉動前的負載,即整體有1 N的負載力,其他彈簧參數和位移仿真中設置一致。
力仿真在位移輸出較小的情況下求解,這樣所有彈簧都有力的貢獻,能得到明顯的力輸出的數據,因此利用該仿真模型可以獲得肌群彈簧56種組合力輸出情況,方便對算法中力的輸出公式進行驗證。實驗數據取極限位置和不考慮反向拉動的情況。表2列舉了部分結果數據。
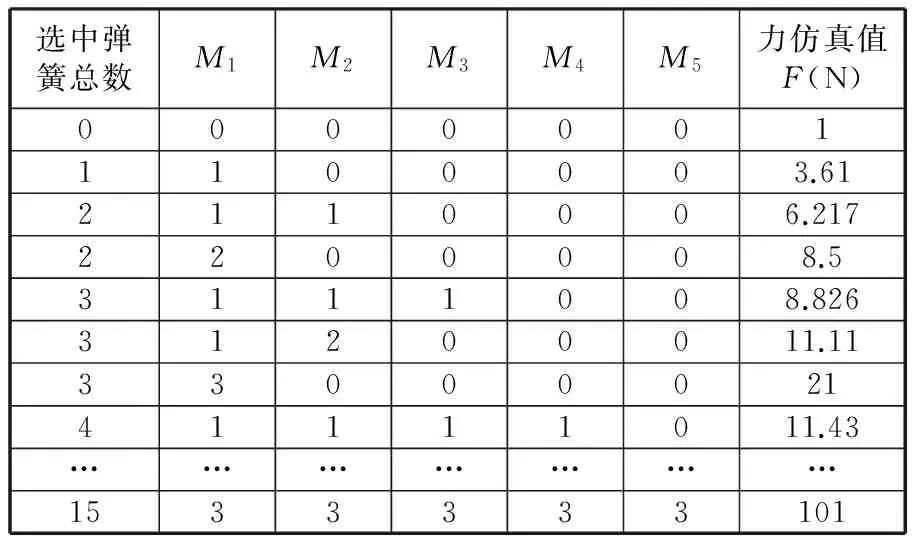
表2 力仿真結果數據
4 實驗研究
4.1硬件平臺設計
硬件平臺主要包括PLC、24 V繼電器、繼電器底座、提供24 V和5 V電壓的開關電源、空氣開關、接線端子、擋塊、導軌、底板、導線。電源、繼電器、接線端子、空氣開關、導線等組成SMA彈簧致動單元的供電回路。電源為PLC和人工肌群提供能源。PLC接受計算機或者觸摸屏指令,通過控制繼電器的通斷控制人工肌群各單元的電源通斷。圖4所示為驅動控制系統硬件電路設計原理圖。該控制系統硬件平臺可根據肌群規模擴展PLC輸出以及繼電器數量,具有模塊化和可重構的特點。
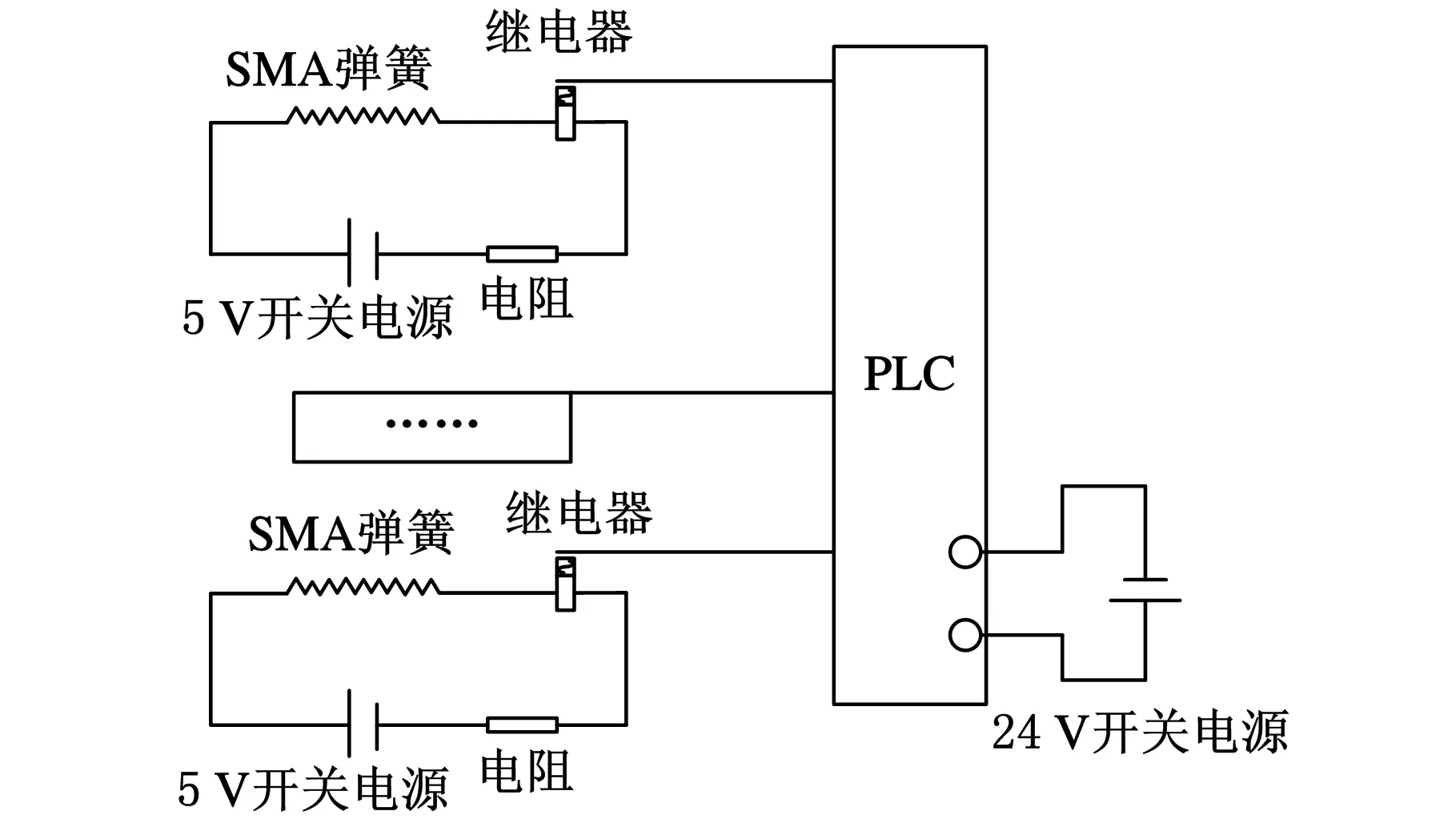
圖4 硬件電路設計原理圖
PLC采用歐姆龍的CP1H,CIF11通訊模塊與計算機的232串口連接。通信協議采用組態王軟件實現。
4.2軟件設計
采用組態王軟件實現CP1H與計算機的通訊,設計控制系統軟件圖形用戶界面(GUI),如圖5所示。圖中圖標主要包含選擇、命令和狀態顯示三類。大方塊代表SMA彈簧,有未選中(色淺)和已選中(色深)兩種狀態,點擊淺色大方塊,顏色由淺變深,表示對應的SMA彈簧已被選擇,其上的編號與SMA彈簧相對應,大方塊左下角都有一個小方塊,也分色深和色淺兩種狀態,分別表示該SMA彈簧處于斷開未通電和通電激活狀態。如圖5中SMA彈簧1、5、6、10、15已被選中并激活。圖5中右下方區域會顯示每束串聯的SMA彈簧中選擇激活的SMA彈簧數目,左下角顯示待激活的SMA彈簧總數。圖5的左上角區域按鈕中,“反選”、“復位”也用于選擇待激活SMA彈簧;點擊“風扇”按鈕,則風扇運行;點擊“確定”后,PLC中程序運算,對應輸出口輸出信號,控制普通繼電器導通外部電路,對需要的彈簧進行通電加熱。“斷開”按鈕用于斷開已接通的SMA彈簧回路。
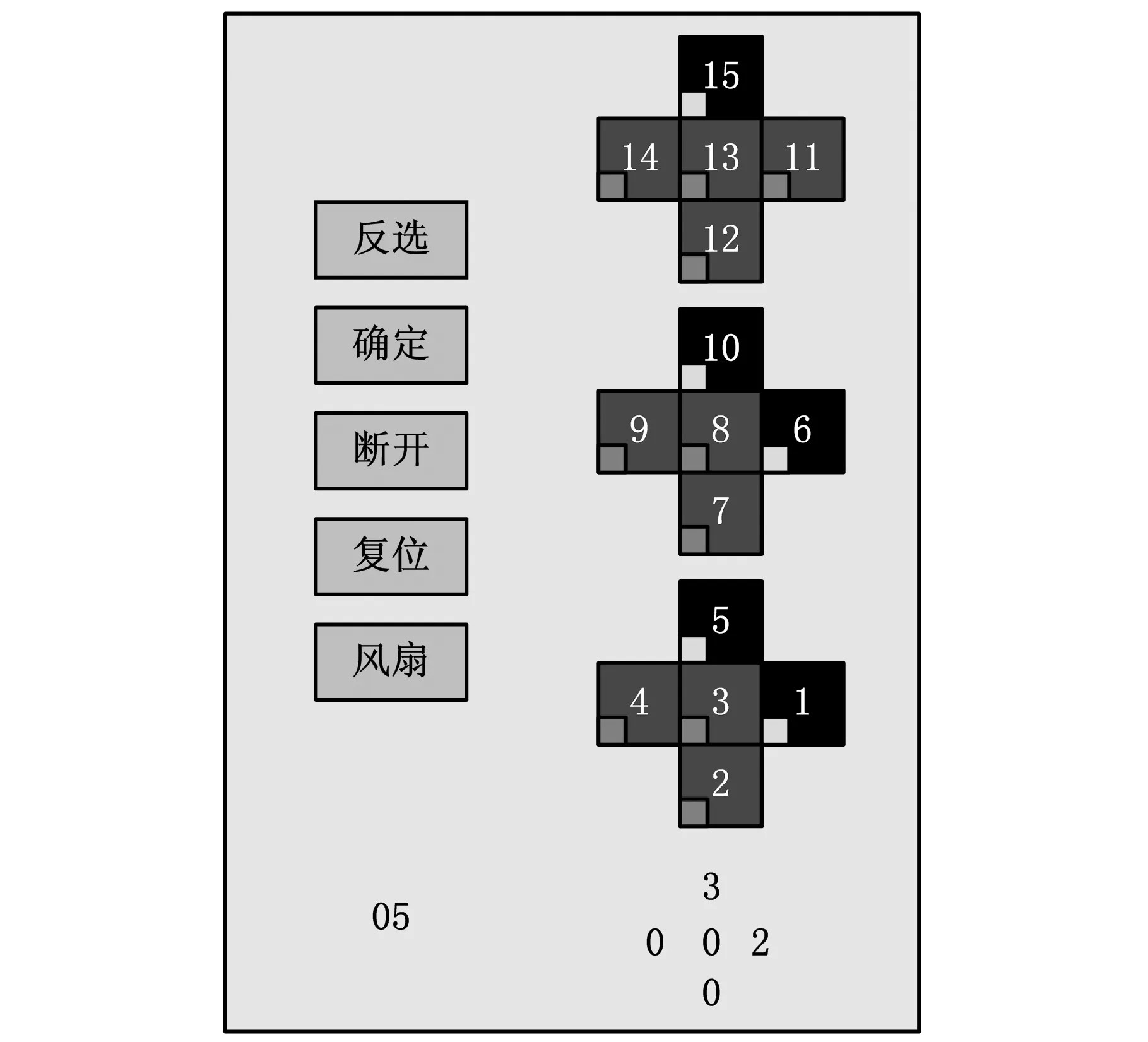
圖5 SMA彈簧集群(3行5列陣列結構)控制系統GUI
過長的通電時間和過大的熱量會破壞SMA彈簧的形狀記憶效應,設計CP1H程序時,采用定時器設定SMA彈簧回路的接通時間,并在斷開SMA彈簧回路后接通風扇回路。
4.3控制法則
給定SMA彈簧集群為3行5列的陣列結構,采用遍歷法,列出SMA彈簧集群激活方案如表3所示,共56組,每一組代表一個時間歷程,依次是歷程1~歷程56。激活的SMA彈簧隨著歷程序號的增加而增加。圖5所示GUI顯示了被激活的SMA彈簧數目,其中上、中、下、左、右激活的SMA彈簧數目分別用M1~M5表示。圖6所示的時間歷程36曲線代表9個致動器激活,且M1~M5分別為2、2、1、1、3。
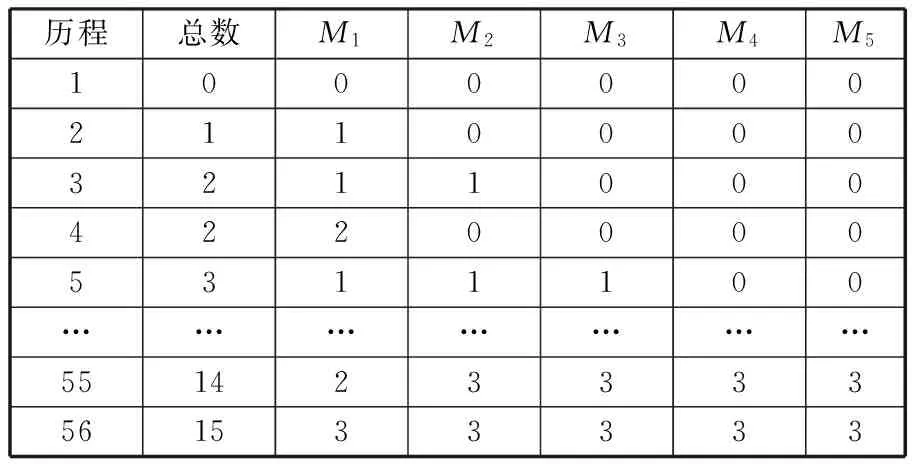
表3 SMA彈簧集群激活方案
4.4實驗驗證
在上述SMA彈簧集群控制系統軟硬件平臺設計和激活控制方案的基礎上,研究不同位置和數目下SMA彈簧激活時集群張力-時間特性。力數據通過力傳感器采集,位移數據通過激光位移傳感器采集。SMA彈簧集群通電電流為2.5 A, 通電時間為7 s。文獻[11]和[13]研究報道了SMA彈簧張力和通電電流大小、時間的關系,這里不再贅述。圖6、圖7是部分實驗結果。
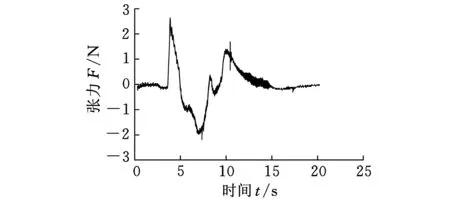
圖6 集群張力時間歷程36
圖6所示為致動器集群張力時間歷程36曲線。由圖6可知,集群張力由3 N變化為-2.3 N,變化范圍為5.3 N。圖7分別給出了集群張力時間歷程1、8、27、46、55曲線。
比較分析圖6、圖7可知,致動器集群張力總體表現為由大到小的一個衰減過程,整個集群張力時間歷程過程大致可以分為四段。如時間歷程36第一段張力峰值在0左右,第二段張力峰值在3 N左右,第三段張力峰值在1.7 N左右,第四段張力又回復到0左右。當時間歷程為55時,所有致動器都激活,集群最大張力也不到3 N。對比分析圖7不同時間歷程數據曲線,多個時間歷程記錄的集群張力最大值差異不夠明顯,這與式(7)的理論模型和表2的仿真結果不符,即仿真與實驗結果存在較大差異。說明SMA彈簧集群內部存在嚴重耦合,影響了致動器集群的整體輸出,需進一步研究其產生機理和抑制方法。
圖6、圖7的致動器集群張力歷程曲線中出現張力振蕩衰減的變化趨勢,這與測試裝置有關:測試力采用致動器拖掛力傳感器,而力傳感器固定在高精度托盤上,后者提供勻速運動,以抵消力傳感器的慣性力。該設計的結果是形成了一個典型的二階振蕩環節。需進一步分析振蕩的固有頻率,然后令力傳感器頻率為被測元件固有頻率的10倍以上。同時,致動器集群的收縮位移-時間歷程較復雜,也會出現致動器集群收縮速度小于傳感器勻速運動速度的現象,令致動器集群有瞬間壓縮的趨勢,因而產生負值。這種情況可以通過調整傳感器速度來消除。
5 結論
(1)設計了基于PLC和組態王軟件的致動器集群控制軟硬件平臺,該平臺能有效實現致動器集群不同位置和數目致動單元的激活控制,達成致動器集群彌補單根致動器單元的設計目標,在不削弱致動器響應頻率、帶寬的前提下,獲得較大的力和位移。
(2)推導了基于數理統計理論的SMA彈簧集群開關控制算法,該算法適用于大規模致動器集群的控制。提出了確定拓撲條件下致動器集群的遍歷法激活控制方案和實現方法,該方法適用于確定拓撲致動器集群的實驗驗證,獲得了致動器集群的張力時間歷程曲線和位移時間歷程曲線。
(3)實驗結果顯示,SMA彈簧集群張力呈振蕩衰減的變化趨勢,表明測試裝置存在振蕩環節,必須選擇合適的傳感器頻率、移動速度予以消除。不同數目致動器單元激活獲得的集群張力數據特征差異不夠明顯,與理論計算存在較大差異,說明致動器集群內部存在耦合,將在后續工作中研究其產生機理和抑制方法。
[1]鮑官軍, 張水波, 陳亮, 等. 基于氣動柔性驅動器的球果采摘末端主持器[J]. 農業機械學報, 2013,44(5): 242-246.
Bao Guanjun, Zhang Shuibo, Chen Liang, et al. Design of Spherical Fruit End-grasper Based on FPA[J]. Transactions of the Chinese Society of Agricultural Machinery, 2013, 44(5): 242-246.
[2]Chiba S, Waki M,Sawa T,et al. Electroactive Polymer “Artificial Muscle” Operable in Ultra-high Hydrostatic Pressure Environment[J]. IEEE Sensors Journal, 2011,11(1): 3-4.
[3]Hara S, Zama T, Takashima W,et al. Polypyrrole-metal Coil Composite Actuators as Artificial Muscle Fibres[J]. Synthetic Metals, 2004,146(1): 47-55.
[4]Sarrazin J C, Mascaro A S. Sequential Growth and Monitoring of a Polypyrrole Actuator System[C]//Proc. SPIE 9056, Electroactive Polymer Actuators and Devices (EAPAD).San Diego,2014:1493-1495.
[5]Mosley M J, Mavroidis C. Experimental Non-linear Dynamics of a Shape Memory Alloy Wire Bundle Actuator[J]. Journal of Dynamic Systems, Measurement, and Control(Transactions of the ASME),2001,123(1): 103-112.
[6]Kratz R, Stelzer M,von Stryk O.Design, Measurement Experiments and Application of a Macroscopic Shape Memory Alloy Actuator System[C]//Actuator 2006-10th International Conference on New Actuators.Bremen, Germany,2006:31-32.
[7]Ueda J, Secord T, Asada H H. Design of PZTCellular Actuators with Power-law Strain Amplification[C]//Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA, 2007: 1160-1165.
[8]Osswald D, Martin J, Burghart C,et al.Integrating a Flexible Anthropomorphic,Robot Hand into the Control, System of a Humanoid Robot[J]. Robotics and Autonomous Systems, 2004,48(4): 213-221.
[9]Ueda J, Odhnar L, Asada H. A Broadcast-probability Approach to the Control of Vast DOF Cellular Actuators[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, Florida,2006:1456-1461.
[10]馮元幀, 生物力學[M]. 北京: 北京科學出版社,1983.
[11]李偉, 熊克, 陳宏, 等. 含有SMA彈簧驅動器的可變傾斜角翼梢小翼研究[J]. 航空學報,2012, 33(1): 22-33.
Li Wei, Xiong Ke, Chen Hong, et al. Research on Variable Cant Angle Winglets with Shape Memory Alloy Spring Actuators[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(1): 22-33.
[12]MacNair D L, Ueda J. A Fingerprint Method for Variability and Robustness Analysis of Stochastically Controlled Cellular Actuator Arrays[J]. The International Journal of Robotics Research, 2011,30(5): 536-555.
[13]王金輝, 徐峰, 閻紹澤, 等. SMA 彈簧驅動器驅動機理及實驗[J]. 清華大學學報: 自然科學版, 2003, 43(2): 188-191.
Wang Jinhui, Xu Feng, Yan Shaoze, et al. Experimental Investagation of Electrothermal Driving Mechanism of SMA Spring Actuators[J]. Journal of Tsinghua University(Science and Technology), 2003, 43(2): 189-191.
(編輯王艷麗)
Study on Driving Control and Dynamic Behaviour of SMA Springs Array
Ying ShenshunJi ShimingCai DonghaiAi Qinglin
Key Laboratory of Special Purpose Equipment and Advanced Processing Technology of Ministry of Education,Zhejiang University of Technology,Hangzhou,310032
This paper focused on control strategy and dynamic behaviour of a SMA springs array. The bionics structure of SMA springs array with 3 rows and 5 columns was firstly constructed, which was based on the analysis of biological microstructure of skeletal muscle. Then, an on-off control strategy for the SMA springs array was presented using mathematical statistical theory. The simulation results of the displacement and force characteristics of the array were provided based on ADAMS. Hardware control system and graphic use interface were developed, which was based on PLC and kingview software respectively. Scheme for control the activation of the SMA springs array was made, and the time histories of stretching force were got to understand influences of amount and location of the activated SMA springs. Experimental results indicate that there exists serious coupling phenomenon. Finally, the paper discussed the stretching force oscillation of the SMA spring array and its estimation method.
actuator; shape memory alloy(SMA); bionic driving control; SMA springs array
2014-02-24
國家自然科學基金資助項目(51275470);浙江省自然科學基金資助項目(LY14E050009,LY12E07004);浙江工業大學特種裝備制造與先進加工技術教育部重點實驗室開放基金資助項目(2011EM008)
TB472DOI:10.3969/j.issn.1004-132X.2015.10.003
應申舜,男,1978年生。浙江工業大學機械工程學院講師、博士。主要研究方向為機器人、智能裝備。發表論文10余篇。計時鳴,男,1957年生。浙江工業大學機械工程學院院長、教授、博士研究生導師。蔡東海,男,1982年生。浙江工業大學機械工程學院講師、博士研究生。艾青林,男,1976年生。浙江工業大學機械工程學院教授。
