比例電磁閥變頻率PWM驅動方法
2015-10-28 11:26:41尚沙沙焦文學浦定超葉其團汪春暉
中國機械工程 2015年8期
康 健 尚沙沙 焦文學 王 杏 浦定超 鈕 震 葉其團 汪春暉
三一重機小型挖掘機研究院,昆山,215334
比例電磁閥變頻率PWM驅動方法
康健尚沙沙焦文學王杏浦定超鈕震葉其團汪春暉
三一重機小型挖掘機研究院,昆山,215334
在挖掘機等工程機械中使用的嵌入式控制器普遍利用脈沖寬度調制(PWM)來驅動比例電磁閥。但由于PWM脈沖輸出的特點和電磁閥自身電感特性的雙重制約,使PWM驅動的比例電磁閥性能難以充分發揮,甚至會影響控制系統整體穩定性。因此,一種根據不同占空比改變PWM頻率的方法被用于驅動比例電磁閥。控制器根據電磁閥控制需求的不同占空比,輸出不同頻率的PWM。測試結果證明,使用變頻率PWM驅動比例電磁閥的方法可以在保證比例電磁閥二次壓力穩定的前提下,維持自身的小幅震蕩,同時降低比例電磁閥的功率損耗。
比例電磁閥;脈沖寬度調制;挖掘機;電控泵
0 引言
在工程機械應用中,電磁閥已經成為最重要的電-機械轉換器。初期的電磁閥使用通斷型電磁鐵,僅存在開和關兩種狀態,響應頻率也相對較低。為適應大型機電一體化系統精確控制的要求,可以在兩個極限位置之間保持任意開度大小的比例電磁閥被大量應用。比例電磁閥與開關電磁閥的區別主要在磁極和支撐系統[1]。開關電磁閥吸合時氣隙變小,依靠不同極性磁極之間的吸力吸合;比例電磁閥工作時氣隙與銜鐵的運動方向垂直,通過控制磁極的磁飽和程度來控制銜鐵位置。
工程機械的嵌入式控制系統通常利用脈沖寬度調制(PWM)的方法來驅動比例電磁閥。PWM包含占空比和頻率兩種信息:調整占空比可以得到所需電壓值;而PWM頻率的選擇對電磁閥二次壓力的穩定性和自身功耗有很大影響。如果頻率過低,電磁閥銜鐵將會跟隨PWM波形大幅振動;如果頻率過高,具有電感特性的電磁閥將PWM整流為過于穩定的驅動信號,過大的靜摩擦力將會影響比例電磁閥的控制精度和動態性能;PWM頻率過大還會導致電磁線圈的鐵損過高。理想的比例電磁閥PWM驅動方法需要使閥芯保持一定振幅的同時可以輸出穩定的二次壓力[2]。
三一重機SY135挖掘機配置的KPM半電控泵K3V和全電控泵K7V分別使用比例電磁閥來控制雙泵總功率和調整雙泵排量。作為整機控制的關鍵元件,實現電磁閥的有效控制將在很大程度上影響系統的穩定性[3-5];同時,比例電磁閥的頻響特性和負載能力也會影響挖掘機快速響應的能力。為提升比例電磁閥輸出壓力的穩定性并降低能耗,一種根據占空比變化改變PWM頻率的方法被用于比例電磁閥驅動。根據比例電磁閥控制所需占空比的不同采用不同的PWM頻率,使比例電磁閥達到輸出壓力穩定、防止閥芯卡滯和降低功耗的目的。為了便于測試,本文設計了基于STM32單片機的電磁閥控制器,能夠根據不同占空比輸出不同頻率的PWM。
1 比例電磁閥控制特性分析
KPM-K3V系列電控泵利用比例電磁閥來控制泵的總功率,而K7V系列全電控泵的雙泵控制完全依靠比例電磁閥進行排量的調節,比例電磁閥自身的動態特性對電液控制系統的健壯性有很大影響,因此比例電磁閥成為機電液一體化控制中的關鍵器件。為便于分析,比例電磁閥的電氣控制回路可以簡化為電阻和電感的串聯,而機械控制部分則可以表示為銜鐵質量塊、氣隙阻尼和回位彈簧的二階振蕩系統,并且其電氣系統和機械系統互相耦合。
1.1功率損耗
電磁閥在工作中會產生各種形式的功率損耗,主要包括銅損和鐵損兩方面。其中,銅損(ΔPCu=I2r)是指電流通過電磁鐵線圈發熱而損失的功率[6],而鐵損(ΔPFe=ΔPh+ΔPe)包括磁滯損耗和渦流損耗[7]。磁滯損耗為鐵磁材料在反復磁化過程中消耗的功率。磁滯損耗ΔPh正比于交變磁化的頻率f、鐵心的體積V和遲滯回線所包圍的面積,其大小與鐵磁材料的性質σh、磁化頻率和磁感應強度的最大值Bm有關。計算磁滯損耗的經驗公式為
(1)
其中,指數n與Bm有關。
由于電磁鐵的閉合鐵芯處于交變磁場中,交變的磁通量使閉合鐵芯中產生感應電流(即渦電流),由渦電流產生的鐵損部分稱為渦流損耗。對于特定的比例電磁閥,渦流損耗與交變磁化的頻率f以及磁感應強度的最大值Bm的二次方成正比,其經驗公式為
(2)
式中,σe為與電磁閥鐵芯材料和結構有關的常數。
由上可知:驅動比例電磁閥的PWM信號頻率過高將會導致過多的功率損失,增加電磁閥的磁滯損耗和渦流損耗。在保證比例電磁閥二次壓力穩定的前提下,PWM頻率應盡可能地低。
1.2機械系統傳遞函數
比例電磁閥由銜鐵彈簧組成的機械系統的傳遞函數為
(3)
其中,ωm表示銜鐵彈簧組成的二階振蕩系統的諧振頻率;δm表示銜鐵彈簧系統的阻尼比,該系數與液壓油的溫度有關,隨著溫度的升高,液壓油黏度變小會使振動阻尼變小;K為電磁閥彈簧剛度。比例電磁鐵位置控制普遍采用電流負反饋,同時電磁閥內部銜鐵質量的減小和彈簧剛度的不斷提高使得比例電磁鐵的動態響應速度得到提升。
1.3電氣系統動態性能
比例電磁閥電氣回路的動態性能可以表示為以下微分方程式:
U(t)=Ri(t)+Ledi(t)/dt+Kvdx(t)/dt
(4)
式中,U(t)為線圈電壓;R為線圈電阻;i(t)為線圈實時電流;x(t)為銜鐵位移;Kv為速度反電勢系數;Le為線圈電感;t為時間。
嵌入式控制器等數字電路普遍采用PWM來驅動比例電磁閥。由于PWM等效為高頻開關信號,電磁閥線圈在一個控制周期內的實時電流為[8]
(5)
式中,D為占空比;T為PWM周期。
由上可知,采用PWM驅動比例電磁閥時,線圈中的穩態電流I和電流波動dI取決于線圈的時間常數τ、PWM頻率1/T和占空比D。根據瞬態電流可以推導出電流及其波動大小:
(6)
A=e-DT/τB=e-(1-D)T/τ
根據式(6),在控制系統中I作為驅動電流控制電磁閥二次壓力。電流波動dI可以保持銜鐵自身的小幅振動,防止出現閥芯卡滯的現象。如果PWM頻率過低,會引起比例電磁閥二次壓力隨PWM脈沖波動。同樣,PWM驅動電磁閥采用不同占空比也會對驅動電流的波動情況產生影響。KPM公司K3V半電控泵的比例電磁閥內部電阻R為17.5Ω,線圈電感Le為19.5mH,則該電磁閥線圈的時間常數τ=Le/R=1.1143ms,挖掘機電壓為24V。不同占空比條件下線圈電流波動大小dI和電流值I變化如圖1所示。
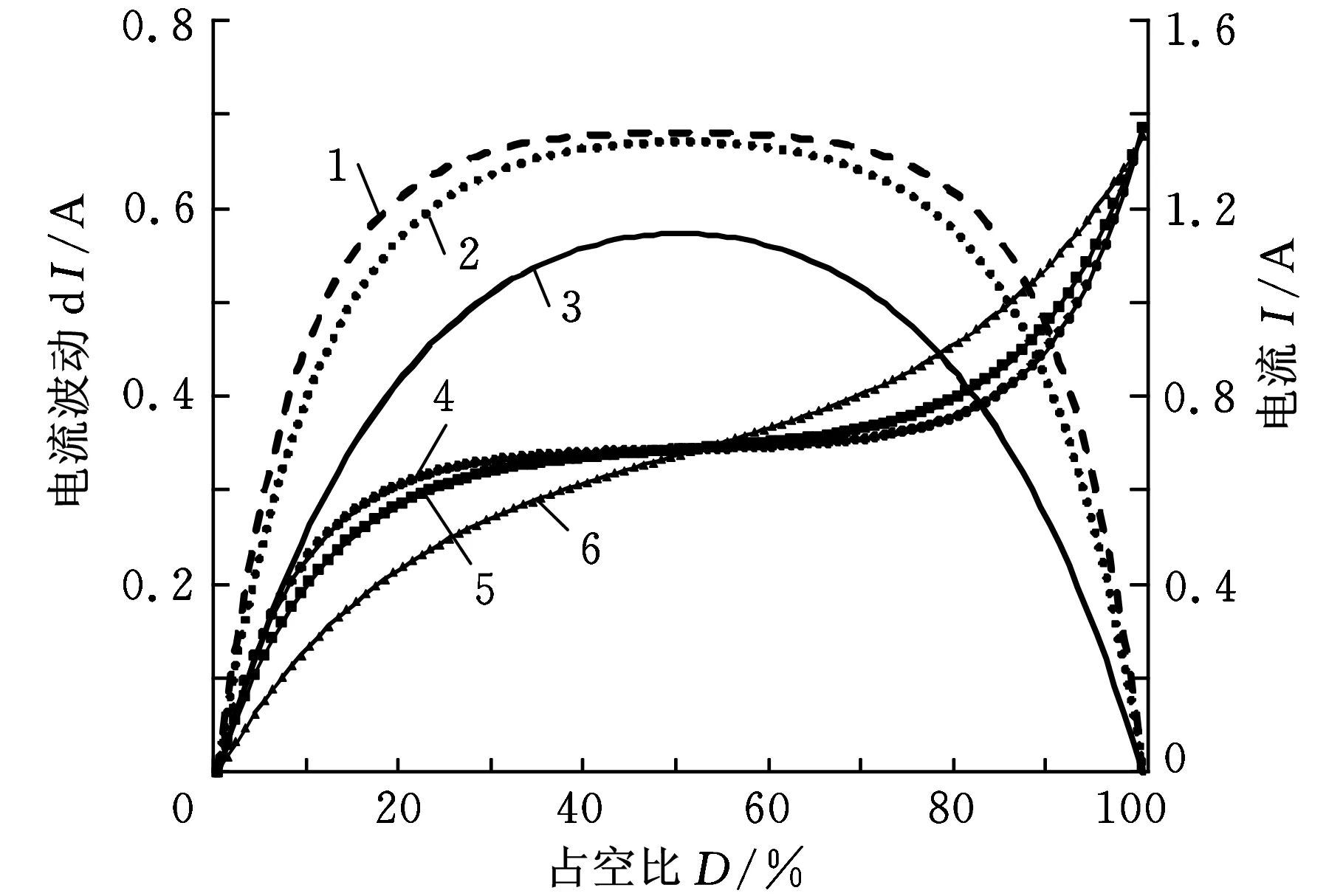
1.dI(80 Hz) 2.dI(100 Hz) 4.dI(180 Hz)4.I(80 Hz) 5.I(100 Hz) 6.I(180 Hz)圖1 不同PWM占空比、不同頻率時電磁閥線圈電流
1.4比例電磁閥控制策略
比例電磁鐵屬于勵磁式電-機械轉換器件,嵌入式控制器產生的控制電流在比例電磁鐵線圈中產生磁通,推動銜鐵位移,閥芯受到的電磁力具有與電流波動相同的頻率。綜合考慮比例電磁閥的機電液系統,其機械部分傳遞函數為低通二階濾波,而電氣系統傳遞函數為低通一階濾波。
KPM-K3V電控泵配置的比例電磁閥的振蕩頻率為80 Hz。由二階低通濾波器的Bode圖可知,對于頻率大于80 Hz的電流波動,電磁閥的機械系統將進行抑制。并且電流的頻率越高,機械二階振蕩系統的抑制作用越強。電磁閥的電氣系統相當于一階的低通濾波,由其時間常數可知,電氣系統的截止頻率為897 Hz,相對于機械系統,電氣系統對PWM脈沖波動信號的抑制作用較小。因此,可以利用機械系統的濾波特性對PWM信號進行過濾得到所需的穩定的驅動電流,但同時需保留閥芯自身顫振所需的小幅電流波動。
電磁閥閥芯的振動幅度不僅與PWM頻率有關,而且根據圖1還可以發現,在某一固定的PWM頻率下電磁閥輸出的二次壓力在占空比為50%時波動最為劇烈,而在占空比為10%和90%的情況下二次壓力輸出波動較小。因此,本文提出了一種根據不同占空比改變PWM信號頻率的控制方法:為了降低電磁閥的功率損失在占空比為10%和90%附近時PWM輸出,采用較低的PWM頻率,而當占空比在50%附近時PWM輸出采用較高的頻率。
2 比例電磁閥驅動器設計
為對驅動比例電磁閥的PWM頻率大小進行優化,設計了基于STM32F103C8T6微處理器的比例電磁閥控制系統[9-11]。STM32為意法半導體集團推出的基于ARM構架的32位低功耗微處理器;具有20K的片內SRAM和64K的FLASH程序存儲器;主頻達到了72 MHz,滿足比例電磁閥PID控制的計算要求;4個通用定時器TIMx可以復用到GPIO口分別輸出4個通道的PWM驅動信號;支持16通道的12位ADC。
為了使STM32芯片端口3.3 V的輸出電壓驅動比例電磁閥,采用L298N芯片實現功率放大,控制挖掘機的24 V電源驅動比例電磁閥;使用1 Ω精密電阻作為電流采樣元件實現電流反饋;采樣電阻與比例電磁閥線圈串聯,采樣電阻兩端電壓利用NE5532雙通道運算放大器得到電壓差并輸入微處理器中復用為ADC功能的GPIO口;STM32芯片與挖掘機原控制器之間通過TJA1050總線驅動芯片進行CAN通信。利用以上各芯片設計的比例電磁閥控制器的電氣原理如圖2所示。

圖2 挖掘機雙泵比例電磁閥控制器電路圖
3 二次壓力測試
當挖掘機在不同擋位即發動機在不同轉速工作時,液壓泵需要根據發動機的外特性轉速扭矩曲線進行功率匹配,即用于液壓泵的恒功率控制的比例電磁閥需要根據不同的工作擋位輸入不同的工作電流。基于以上要求,比例電磁閥在不同擋位二次壓力的測試方法如下:設定電磁閥PWM驅動的頻率后,每隔一段時間變換發動機擋位,這時控制器將根據預先設定的功率匹配結果和工作擋位輸出不同的電流值。數據采集使用FLUKE 196C示波器配備的電流鉗測量電流大小,并且使用Parker Service Master獲取比例電磁閥出口處的二次壓力大小和溫度值。
液壓油溫度變化而導致的液壓油黏度變化會影響電磁閥的響應特性。為忽略這一影響因素,分別在液壓油溫度為環境溫度和完全熱機后進行二次壓力測試。在電流恒定條件下,液壓油溫度為13.5 ℃時采用不同PWM頻率驅動比例電磁閥的二次壓力測試結果如圖3所示。完全熱機后當液壓油溫度達到36 ℃時,二次壓力波動相對較大,如圖4所示。
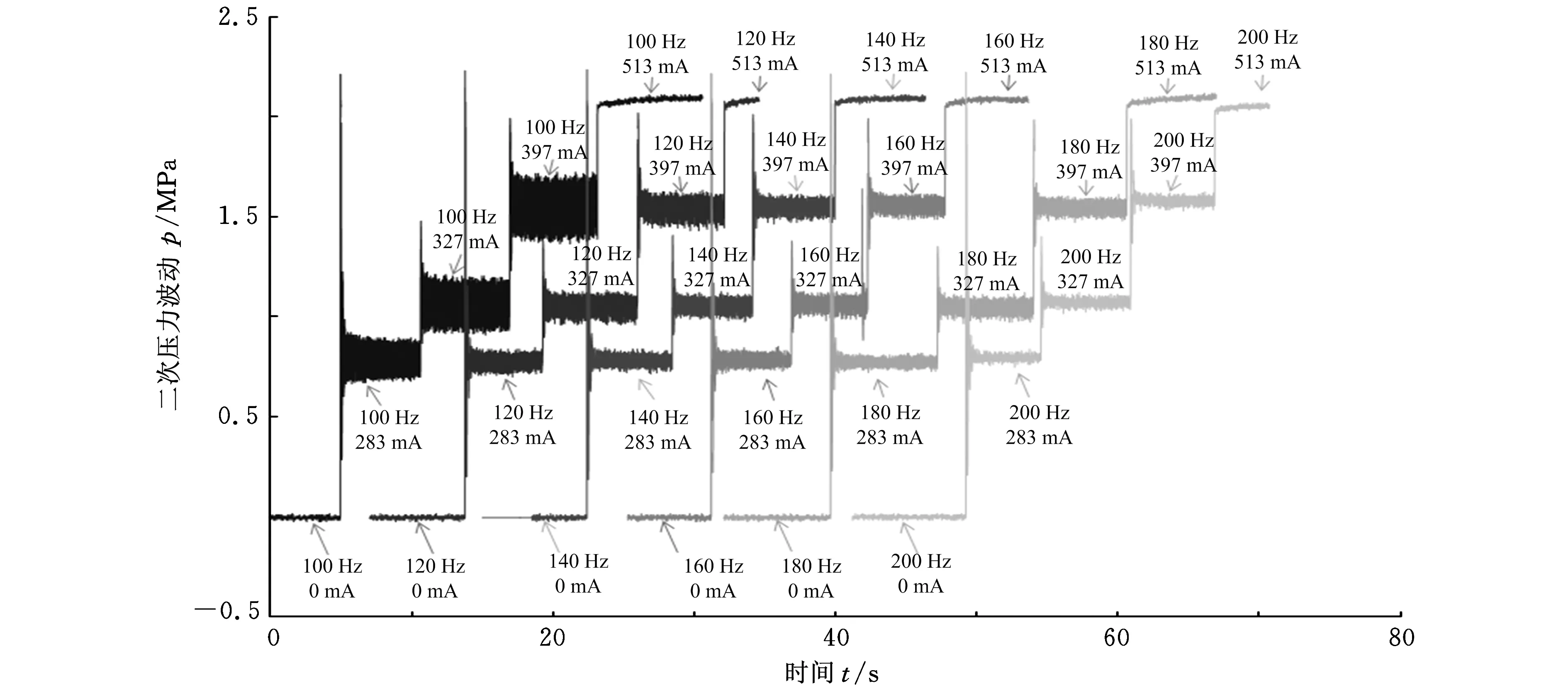
圖3 13.5 ℃時不同PWM頻率比例電磁閥輸出壓力波動
圖4 36 ℃時不同PWM頻率比例電磁閥輸出壓力波動
針對本測試采用寄生顫振PWM的比例電磁閥驅動器,當溫度較低時電磁閥的二次壓力波動范圍相對較小,并且PWM頻率提高時,電磁閥輸出的二次壓力波動相應減小。同時驅動電流的不同也會導致二次壓力波動范圍變化。根據測試結果,采用不同頻率PWM且電流為327 mA時,電磁閥輸出壓力波動較大;而當電流逐漸遠離327 mA時,壓力波動范圍隨之逐漸減小;當電流為0或513 mA時,由于接近比例電磁閥能夠輸出的最大二次壓力和最小二次壓力,壓力波動始終保持在較低水平。
根據上述分析,當二次壓力波動滿足要求時應該采用更低的PWM驅動頻率。根據控制系統穩定性要求,選擇波動范圍相近且頻率相對較低的PWM頻率為該輸出電流的最優頻率。因此,可以得到不同溫度條件下的比例電磁閥變頻率PWM驅動策略,如表1所示。可知當電流值為最大值和最小值時,要達到二次壓力穩定的PWM頻率較低;而當電流處于中位時,需要采用較高的頻率,與理論分析的結果一致。如果采用其他驅動電流時,通過線性插值可以得到該電流值條件下的優化PWM頻率。
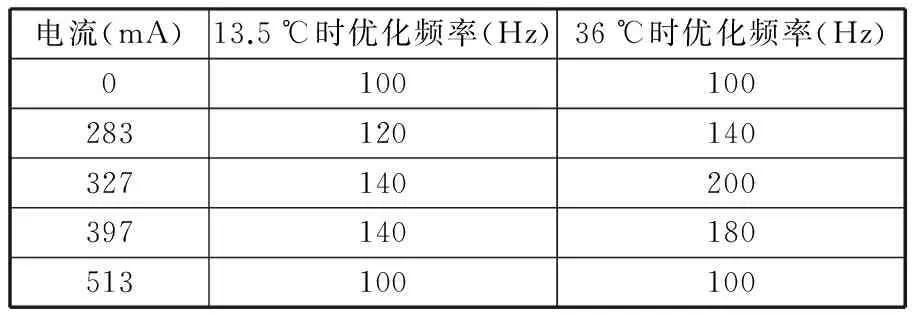
表1 比例電磁閥PWM優化頻率
當挖掘機散熱條件不好或環境溫度較高時,液壓油溫度存在大幅度變化甚至可以達到70~80 ℃。根據測試結果,設置頻率為300 Hz能夠在高溫且液壓油溫存在大幅變化時得到穩定的二次壓力。并且在挖掘機工作90 min后,泵控制比例電磁閥閥體表面溫度為53 ℃,液壓泵表面溫度為60 ℃,控制器表面溫度為26 ℃,均符合正常工作要求。
4 結論
(1)根據PWM占空比即電流的不同,得到寄生顫振PWM驅動比例電磁閥的最優頻率。通過對比例電磁閥輸出壓力的測試結果表明:利用變頻率的PWM驅動信號可以保證在PWM頻率較低的前提下,使電磁閥輸出穩定的二次壓力;同時電磁閥的功率損耗較低,且保留了電磁閥閥芯的小幅顫振來防止閥芯卡滯。
(2)隨著液壓油溫度的升高,同樣頻率PWM驅動的比例電磁閥輸出的二次壓力逐漸變不穩定。針對采用固定頻率的電磁閥驅動系統,高溫條件下可采用300 Hz的PWM來驅動比例電磁閥。
[1]王曉罡,陳文曲,唐妹芳,等.比例電磁閥的特性分析與試驗研究[J].火箭推進, 2011, 37(2): 52-59.
Wang Xiaogang,Chen Wenqu,Tang Meifang,et al.Testing and Characteristics Analysis of Proportional Solenoid Valve[J].Journal of Rocket Propulsion,2011, 37(2): 52-59.
[2]蘇嶺,柳泉冰,汪映,等.脈寬調制保持電磁閥驅動參數的研究[J].西安交通大學學報,2005,39(7): 689-692.
Su Ling,Liu Quanbing,Wang Ying,et al.Experimental Investigation on Parameters of Pulse Width Modulation Holding Solenoid Valve Drive Mode[J].Journal of Xi’an Jiaotong University,2005,39(7):689-692.
[3]劉興華,王裕鵬,陳宇航,等.電磁閥驅動電流對噴油特性影響規律研究[J].北京理工大學學報,2011,31(5): 514-518.
Liu Xinghua,Wang Yupeng,Chen Yuhang,et al.Effects of Solenoid Valve Drive Current on Fuel Injection Characteristics[J].Transactions of Beijing Institute of Technology, 2011, 31(5): 514-518.
[4]葉宏偉,王濤,金鑫.高速電磁閥驅動控制策略的研究[J].電工電氣,2011(7): 18-20.
Ye Hongwei,Wang Tao,Jin Xin.Study on High Speed Solenoid Valve Drive Control Strategy[J].Diangong Dianqi,2011(7):18-20.
[5]劉建成,王立德,劉彪.基于DSP的柴油機噴油電磁閥驅動電路的設計[J].內燃機,2007(1):14-17.
Liu Jiancheng,Wang Lide,Liu Biao.Design of Driving Circuit for Oil Injection Solenoid Based on DSP[J].Internal Combustion Engines,2007(1):14-17.
[6]席建中,張寧,韓成春.電磁閥線圈溫度預測建模及耐溫性判斷[J].控制工程, 2013, 20(2):377-380.
Xi Jianzhong,Zhang Ning,Han Chengchun.Coil Temperature Prediction Modeling of Electromagnetic Control Valve and Resistant Temperature Judgement[J].Control Engineering of China,2013,20(2): 377-380.
[7]姚曉武.汽車燃油系統比例電磁閥關鍵技術的研究[D]. 杭州:浙江大學,2007.
[8]段麗娟,陶剛,孟飛.高速比例電磁閥電-機械轉換器動態特性研究[J].液壓與氣動, 2013(5): 20-22.
Duan Lijuan,Tao Gang,Meng Fei.Electro-mechanical Converter Dynamic Analysis of High-speed Proportional Solenoid Valve[J].Chinese Hydraulics Pneumatics, 2013(5): 20-22.
[9]翁寅生.基于STM32的電磁閥控制電路研究[J].筑路機械與施工機械化,2012, 29(4): 89-92.
Weng Yinsheng.Study on Solenoid Valve Control Circuit Based on STM32[J].Road Machinery & Construction Mechanization, 2012, 29(4): 89-92.
[10]袁月峰,劉鋼海,陳典紅.基于STM32單片機的氣動比例方向閥控制器[J].儀表技術與傳感器,2013(4): 22-27.
Yuan Yuefeng,Liu Ganghai,Chen Dianhong.Digital Controller for Pneumatic Proportional Directional Valve Based on STM32 Microcontroller[J].Instrument Technique and Sensor,2013(4): 22-27.
[11]盧軍,李振璧,曹明明,等.基于STM32的掘進機控制系統設計[J].煤礦機械,2013,34(1):265-267.
Lu Jun,Li Zhenbi,Cao Mingming,et al.Design of Control System of Boring Machine Based on STM32[J].Coal Mine Machinery, 2013, 34(1): 265-267.
(編輯陳勇)
Proportional Electromagnetic Valve Driven by Frequency-varying PWM
Kang JianShang ShashaJiao WenxueWang XingPu DingchaoNiu ZhenYe QituanWang Chunhui
Small Size Excavator R&D institute of SANY Heavy Machine,Kunshan,Jiangsu,215334
In applications of excavator or other industrial machines, proportional electromagnetic valve was usually driven by PWM signals of embedded control system. However, due to pulse output characteristics of electromagnet,the performance of proportional electromagnetic valve was limited, even impacted stability of the system. A frequency-varying method of PWM driving was proposed. According to different duty ratio of PWM, the embedded control system output PWM with different frequencies. Through this method, the output oil pressure of proportional electromagnetic valve maintains within a determinated range, the valve-core’s zero-average oscillations is reserved and power consumption of proportional electromagnetic valve is relatively low.
proportional electromagnetic valve;pulse width modulation (PWM);excavator;electronic control pump
2014-03-19
TP271< class="emphasis_italic">DOI
:10.3969/j.issn.1004-132X.2015.08.007
康健,男,1985年生。三一重機小型挖掘機研究院工程師、博士。主要研究方向為工程機械發動機液壓泵控制。發表論文2篇。尚沙沙,女,1984年生。三一重機小型挖掘機研究院工程師。焦文學,男,1984年生。三一重機小型挖掘機研究院工程師。王杏,女,1984年生。三一重機小型挖掘機研究院工程師。浦定超,男,1985年生。三一重機小型挖掘機研究院工程師。鈕震,男,1985年生。三一重機小型挖掘機研究院工程師。葉其團,男,1982年生。三一重機小型挖掘機研究院工程師。汪春暉,男,1966年生。三一重機小型挖掘機研究院院長、工程師。
