智能分布式電動車輛柔性化系統平臺
2015-10-28 11:26:42羅禹貢張書瑋李克強
中國機械工程 2015年8期
羅 劍 羅禹貢 張書瑋 李克強
清華大學汽車安全與節能國家重點實驗室,北京,100084
智能分布式電動車輛柔性化系統平臺
羅劍羅禹貢張書瑋李克強
清華大學汽車安全與節能國家重點實驗室,北京,100084
為解決現有實驗平臺車可擴展和可升級性能不強、對智能技術與電動汽車技術集成程度不高的問題,提出了一種可擴展、柔性化電動汽車系統平臺建立方法。該柔性化平臺具有開放式結構、模塊化部件,容易實現功能的擴展和部件的升級,使得機械參數的改變和電氣設備的接入都變得更容易,有助于快速實現和驗證設計。仿真和實驗表明,具備新型結構的電動車平臺滿足基本性能要求,能夠方便地配置成各種系統形態,并進行相關實驗。
純電動汽車;智能環境友好型車輛;分布式驅動電動汽車;柔性化平臺設計
0 引言
為更好地解決汽車節能與安全問題,電動汽車和智能汽車的交叉與集成研究受到了重視[1-2]。李克強等[3]提出了智能環境友好型車輛(intelligent environment-friendly vehicle,i-EFV)的概念并做了大量研究工作。隨著電動汽車技術的發展和智能技術的進步,分布式電驅動、自動駕駛、車-車(路)通信等技術愈發受到重視,搭建一個純電動智能平臺來開展電機驅動車輛主動安全控制、智能技術以及車聯網技術的研究是十分必要的。
由于實驗平臺需求的特殊性及復雜性,在現有汽車上改造的難度與工作量較大,因此很多大學和研究機構選用桁架結構作為車輛主體。Nagai等[4]應用豐田開發的后輪輪轂電機驅動電動汽車NOVLE,研究驅動力分配,提高了車輛操控性與穩定性,并在車輛前部安裝激光雷達等傳感器,實現主動避障等功能。Sumiya等[5]開發了四輪獨立電驅動平臺車FPEV2-Kanon,來研究節能駕駛、車輛狀態估計、穩定性控制。Gerdes等[6]搭建P1、X1平臺來研究線控轉向、極限工況操穩性、自動駕駛。日本NTN公司基于桁架結構開發實驗平臺車來驗證輪轂電機驅動系統。國內,同濟大學開發了“春暉”系列微型電動車,進行了路面附著系數與四輪獨立驅動電動車車輛狀態估計的研究[7]。中國科學院深圳研究院開發了四輪輪轂電機驅動車輛,研究了基于四輪驅動力矩分配的節能控制方法[8]。基于桁架結構的實驗平臺空間開放,便于安裝設備和實驗操作。另外,桁架平臺車設計難度適中,且不依賴復雜的加工設備,成本較低,其開發逐漸成為一種趨勢。
上述平臺在滿足動力學實驗、智能汽車功能驗證方面做了大量工作,但在設計之初對柔性、可擴展和可升級性能考慮不足。結合分布式驅動、分布式液壓制動、車-車(路)通信等功能的平臺尚不存在,即集成清潔能源動力、信息交互與電控化底盤的新型結構還不存在。因此將智能控制技術和電驅動技術結合在一起進行系統集成化創新的研究還有待深入。
本文致力于搭建一個開放式、可擴展、可升級、柔性化的分布式電驅動智能平臺,綜合考慮i-EFV清潔能源動力、電控化底盤和智能信息交互集成的特性,使機械參數的改變和電氣設備的接入都變得更容易,從而有助于驗證新功能,不斷提升車輛性能。為此,首先對可擴展柔性試驗平臺進行需求分析,基于現有i-EFV架構的四輪獨立電驅動車輛開放式總體結構和車載總線技術,提出了柔性可擴展電氣方案。在此基礎上,開展模塊的研制工作,包括分布式驅動、分布式液壓制動、電控轉向、智能傳感器、車-車(路)通信等各子系統的設計和試制。最終,搭建了四輪獨立電驅動智能車輛系統平臺,并進行了面向信息融合與控制協同技術的軌跡跟蹤、制動/驅動協調、車-車通信等功能的仿真與實驗。
1 面向研究的可擴展柔性平臺設計
柔性包含兩層意思,即機械系統柔性和電氣系統柔性。柔性平臺的搭建使得機械參數的改變和電氣設備的接入都變得更容易,從而有助于設計的快速實現和驗證。智能分布式電動平臺作為柔性系統平臺,應能易于進行結構調整和設備擴展,完成智能安全控制相關實驗,為實現上述要求,設計車輛的總體布置方案與電氣系統方案。
1.1總體方案與布置
柔性平臺車在主體結構上,采用桁架結構車身(整車空間開放,便于安裝設備、布線及連接操作);在機械結構上,采用模塊化設計(方便部件替換與升級)。為此設計圖1所示的柔性底盤機械系統。
上述設計在結構與功能上至少(但不限于)支持以下功能擴展與升級:
(1)機械轉向與線控轉向的切換。結構設計上,為實現機械轉向與線控轉向系統的切換,轉向盤與轉向拉桿之間的機械連接部分設計成方便拆卸的同步帶傳動結構(圖1a)。電氣系統設計上,將轉角與轉矩傳感器、轉向電機控制器掛載在CAN總線上,修改系統控制軟件即可實現擴展。
(2)被動懸架升級為主動懸架。常規車輛,從被動懸架升級為主動懸架,改造工作量是極大的。但對于柔性平臺,在設計之初就已經為懸架改造預留了空間,在機械接口一致的情況下,只需要將減震彈簧與阻尼器替換掉,接入主動式空氣或液壓彈簧即可實現升級(圖1b)。
(3)前輪轉向升級為四輪轉向。為將前輪轉向升級為四輪轉向,前后輪模塊的設計應保持一致,即選用相同的懸架、羊角。為使底盤容易模塊化并且緊湊,采用雙橫臂獨立懸架設計,輪轂電機通過羊角連接在懸架上(圖1c)。這樣只需在兩后輪間添加相同的轉向拉桿即可構成四輪轉向系統(圖1d)。模塊化設計在實現結構共用的同時,方便功能擴展。
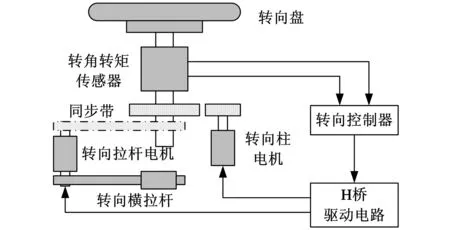
(a)轉向系統

(b)懸架系統(c)驅動輪模塊

(d)四輪轉向系統圖1 柔性底盤機械系統示意圖
此外,柔性平臺作為動力學實驗平臺,尤其是四輪獨立電驅動實驗平臺,至少應具備四輪驅動轉矩獨立控制、轉向主動控制、四輪制動力獨立控制等功能。由于存在高速轉彎、側滑等試驗工況,所以質量中心應盡量貼近地面,防止車輛側翻。此外,柔性平臺對車速、加速度、制動距離、安全性等有一定要求,因此設計車輛的基本參數與性能指標如下:最高車速70 km/h,0~40 km/h加速時間小于12 s,50 km/h制動距離小于20 m。
1.2電氣系統方案
電氣上,對應柔性平臺的要求,設計電氣系統連接結構(圖2),設備采用總線連接,以便于信息共享與融合。圖2中的…為擴展點,設備接入時,只需連接2根電源線、2根通信線即可完成。
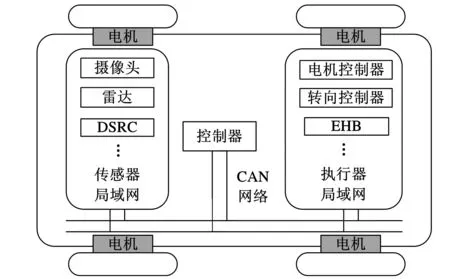
圖2 電氣系統連接示意圖
電氣系統采用獨立模塊化設計,包括整車控制器、傳感器局域網和執行器局域網。傳感器局域網包括智能攝像頭、智能雷達等部件;執行器局域網主要包括輪轂電機控制器和輪轂電機、制動控制器和電磁閥、轉向控制器和轉向電機等部件。
為了保證電源電壓對不同電器的兼容性,提供5 V、12 V、48 V等的電壓。為了避免總線負載過高的情況發生,將整車劃分為傳感器局域網、執行器局域網及其與控制器構成的總線網。傳感設備掛載在總線上,傳感器局域網負責內部設備信息的采集、處理,在信息來源上保證信息融合的便捷性,并將結果打包通過網關發送給控制器。執行器局域網接受控制器的信號,將信號解析為可執行命令發送給各執行器。子網之間通過CAN總線進行通信,實現信息共享。整車控制器包括上位機和下位機兩部分,上位機將Simulink編寫的控制算法程序進行編譯,生成可執行文件并下載到下位機。下位機采用dSPACE公司的Micro-Autobox實時控制系統。實驗時,先將程序由上位機編譯下載到下位機,然后整車控制器根據期望目標、車輛及環境狀態對電動車轉向電機、輪轂電機及制動電磁閥進行控制。
2 平臺子系統設計
為實現上述方案,進行子系統選型與設計。本文主要討論分布式驅動系統、分布式液壓制動系統、電控轉向系統、環境感知系統和基于車聯網技術的信息交互系統。
2.1分布式驅動系統
永磁無刷電機具有功率密度高、效率高、體積小、輸出轉矩大、可控性好等一系列優點。從驅動方式上看,永磁無刷電機可分為永磁同步電機(PMSM)和永磁無刷直流電機(BLDC)。PMSM由正弦波驅動,需要連續位置反饋實現控制。BLDC由方波驅動,需要離散位置反饋實現控制,控制更為簡單。選用4個額定功率為2 kW、額定轉矩為30 N·m、峰值轉矩為100 N·m的BLDC輪轂電機作為驅動電機。通過經驗公式,推算電機轉矩,實現轉矩閉環控制。
電機扭矩與輸入電壓的關系為[9]
(1)
式中,Tm為電機扭矩;Kt為電機常數;Rm為電機電阻;Lm為電機電感;Um為輸入電壓。
測量電機的輸入電壓,采用電壓反饋即可精確控制動/驅動轉矩。
2.2分布式液壓制動系統
分布式制動系統一般由電子機械制動(EMB)實現。限于技術水平,目前EMB尚未成熟,本平臺采用4個車載液壓控制單元(electro-hydraulic brakes,EHB)模擬分布式制動系統,參考文獻[10]中的制動力控制方法,對圖3所示的系統建模并簡化,以實現對液壓制動力的主動控制。
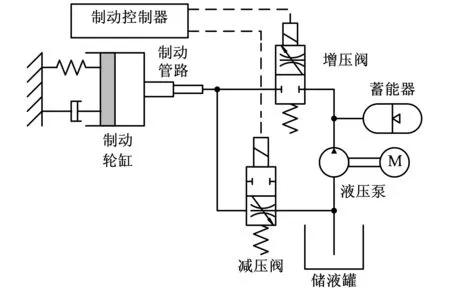
圖3 液壓制動系統
2.3電控轉向系統
在平臺車上實現圖1a所示的結構與系統連接。控制系統開發時,為了達到快速開發的目的,需要在Simulink環境下搭建相應的模型。待軟件功能仿真驗證后,下載到Micro-Autobox系統來執行控制。
轉向盤轉角閉環控制的原理是,輸入模塊負責采集轉向盤轉角傳感器信號,控制模塊負責根據采集的轉角信號計算得到電機控制脈寬調制信號,輸出模塊使能脈寬調制(pulse width modulation,PWM)端口,輸出相應占空比的PWM方波來驅動電機[11]。
2.4環境感知系統
環境感知系統由(但不限于)雷達、超聲波距離傳感器、智能攝像頭、全球定位系統(global positioning system,GPS)構成。
各系統掛載在總線上,雷達、超聲波傳感器將距離信息發送至總控制器,智能攝像頭將車道線、車輛與行人識別結果發送至總控制器,車輛位置從GPS獲取。
2.5信息交互系統
信息交互系統是實現車聯網的基礎系統,包括車-車網、車-路網甚至車輛與手機的聯網。專用短程通信(dedicated short range communications,DSRC)系統是實現車-車(路)通信的手段之一。DSRC發送和接收本車與旁車、本車與道路的交互信息,其聯網系統如圖4所示。搭建的短程通信系統總體硬件包括車載通信單元(OBU)、GPS模塊、路側通信單元(RSU)以及顯示與處理設備,使用DSRC達到整個系統互通的目的[12]。

圖4 信息交互系統構成
3 功能與性能測試
搭建完成的平臺車如圖5所示,通過仿真與實驗來驗證平臺車功能。

圖5 智能環境友好型電動平臺車
3.1基本性能測試
對車輛進行基本性能測試,得到如下結果:最高車速為70 km/h,0~40 km/h加速時間為10 s,最小轉向半徑為6 m,最大爬坡度為10%,續駛里程為50 km。
3.2軌跡跟蹤測試
激活GPS、驅動自動控制系統、制動自動控制系統、電控轉向系統,就可以將車輛配置成一個最簡單的自動駕駛車輛。
在開闊的場地,設計弧形軌跡,驗證基于GPS的車輛軌跡跟蹤系統功能。系統首先獲取車輛位置,通過計算當前位置與期望軌跡的偏差,計算出車輛下一時刻的行進方向,從而控制轉向、驅動與制動系統,實現軌跡跟蹤,結果如圖6所示。從圖6可以看出,整體跟蹤效果良好,但由于GPS信號有跳動,軌跡會有一定的偏差和抖動。
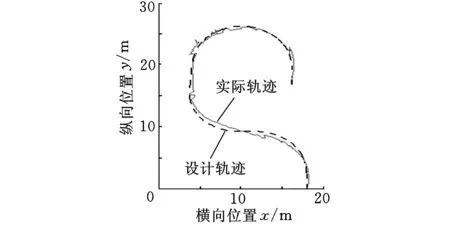
圖6 軌跡跟蹤實驗結果
3.3制動/驅動協調控制
四輪獨立電驅動汽車具備四輪驅動力和制動力獨立控制的特點,可以實現常規車輛無法實現的控制,進一步提升車輛穩定性。
轉向過程車輛失穩時,需要對制動/驅動進行協調控制,此時激活四輪獨立驅動系統、分布式制動系統、自車姿態傳感系統就可以實現先進的穩定性控制系統。
圖7對應轉向盤轉角正弦輸入工況仿真結果,即轉向盤轉角連續在-90°~90°之間以正弦規律變化。
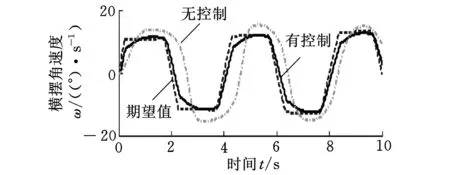
(a)橫擺角速度
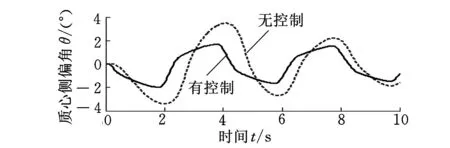
(b)質心側偏角
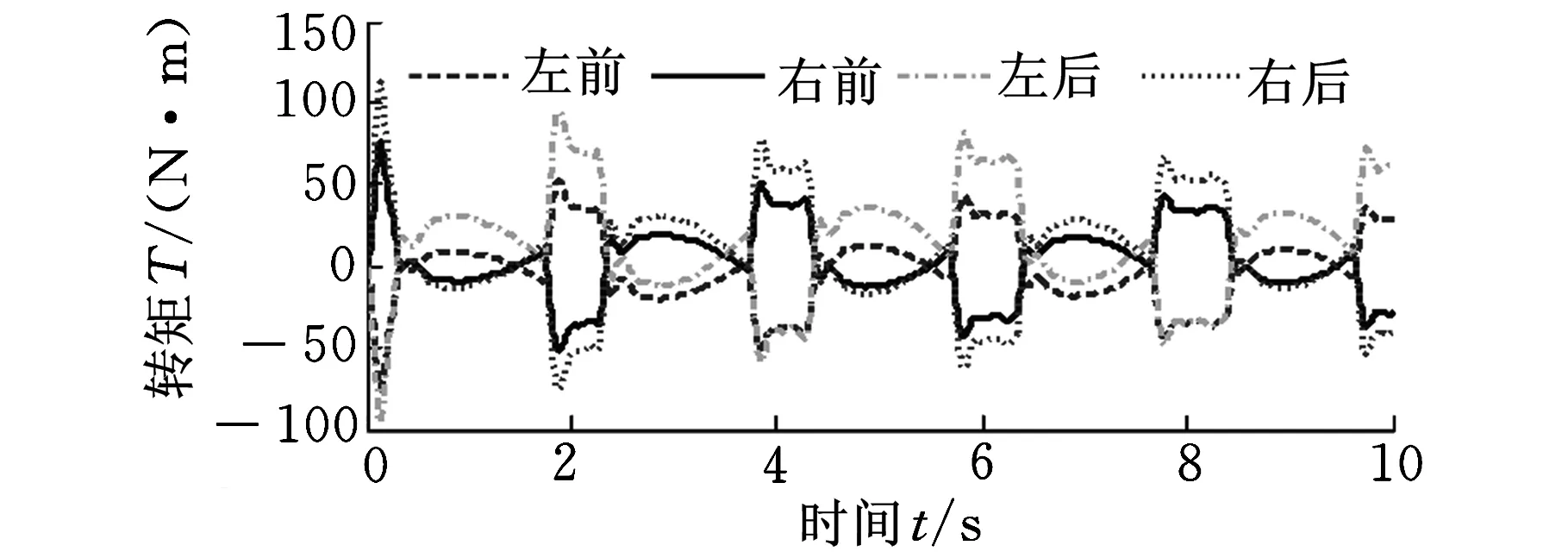
(c)制動/驅動轉矩圖7 制動/驅動協調控制結果
通過橫擺角速度響應(圖7a)可以看出,進行制動/驅動控制時,橫擺響應更加精確和快速,能較好地跟隨駕駛員輸入;不進行控制時,角速度有20%左右的偏差,且有明顯滯后。質心側偏角(圖7b)在有控制時更小。
3.4車車通信
城市環境中,駕駛員視線經常被交叉路口盲點遮擋,因此在交叉路口引入基于DSRC的安全警示系統非常必要。激活DSRC系統、開放整車總線信息,就可以實現一個基本的車-車(路)通信系統。
設計實驗,測試交叉路口DSRC數據通信質量,交叉路口為圖8中圓點區域,車輛與基站處于路口兩側,但互相不在可視范圍之內。實驗取設備與交叉口的距離分別為5 m、10 m、15 m[12]。

圖8 DSRC實驗路況
通過設備監測信號丟包率與強度,并統計結果,如表1所示。從表中數據可以看出,搭建的信息交互系統具有信號傳輸延遲低、丟包率低的特性,能夠達到車-車(路)信息交互與車輛控制的要求。
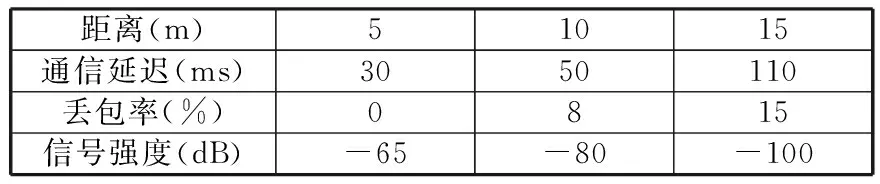
表1 DSRC測試結果
4 結論
①搭建的開放式、可擴展、柔性化純電動平臺體現了i-EFV所應具備的清潔能源動力、信息交互與電控化底盤配置。②柔性平臺的搭建使得機械參數的改變和電氣設備的接入都變得更容易,有助于驗證新功能,不斷提升性能。③具備分布驅動、分布液壓制動、智能傳感器等新型結構的系統平臺,能夠方便地配置成各種系統形態,進行智能車、底盤集成控制、車-車(路)通信相關實驗。
[1]Mitchell J W,Borroni-Bird E C,Burns D L.Reinventing the Automobile:Personal Urban Mobility for the 21st Century[M].Cambridge:MIT Press,2010.
[2]黃錫昌,宗志堅.基于改進預瞄跟隨算法的電動車智能轉向控制[J].中國機械工程,2014,25(14):1984-1987.
Huang Xichang,Zong Zhijian.Intelligent Steering Control Strategy of EV Based on Improved Preview Following Algorithm[J].China Mechanical Engineering,2014,25(14):1984-1987.
[3]李克強,陳濤,羅禹貢,等. 智能環境友好型車輛:概念、體系結構及工程實現[J]. 汽車工程,2010,32(9):743-748.
Li Keqiang,Chen Tao,Luo Yugong,et al.Environmentally Friendly Intelligent Vehicle:Concept Architecture and Implementation[J].Automotive Engineering,2010,32(9):743-748.
[4]Shinoa M, Nagai M. Independent Wheel Torque Control of Small-scale Electric Vehicle for Handling and Stability Improvement[J].JSAE Review,2003,24(4):449-456.
[5]Sumiya H,Yokohama N.Range Extension Control System for Electric Vehicle with Active Front Steering and Driving/braking Force Distribution on Curving Road[C]//IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society.Glendale,2010:2352-2357.
[6]Yung Hsiang,Hsu J,Gerdes J C.Stabilization of a Steer-by-wire Vehicle at the Limits of Handling Using Feedback Linearization[C]// ASME International Mechanical Engineering Congress. Orlando,2005:1-10.
[7]陳辛波,萬鋼,李晏,等. 雙橫臂懸架一扭桿彈簧一電動輪模塊的開發與應用[J]. 機械工程學報,2005,41(12):92-95.
Chen Xinbo,Wan Gang,Li Yan,et al. Development and Application of the Module Structure of In-wheel-motor and Double Wishbone Suspension with Torsion Bar[J]. Chinese Journal of Mechanical Engineering,2005,41(12):92-95.
[8]Qian Huihuan,Xu Guoqing, Yan Jingyu.Energy Management for Four-wheel Independent Driving Vehicle[C]//International Conference on Intelligent Robots and Systems. Taipei,2010:5532-5537.
[9]張金柱,張洪田,孫遠濤. 電動汽車穩定性的橫擺力矩控制[J]. 電機與控制學報,2012,6(6):75-80.
Zhang Jinzhu,Zhang Hongtian,Sun Yuantao.The Direct Yaw Control of Electric Vehicle Stability Control[J].Electric Machines and Control,2012,16(6):75-80.
[10]周磊.電動汽車制動能量回饋與制動穩定性的協調控制[D].北京:清華大學,2009.
[11]張海林.基于電動轉向的車道保持系統[D].北京:清華大學,2012.
[12]向昊.DSRC智能綜合信息管理平臺研究與實現[D].重慶:重慶郵電大學,2013.
(編輯張洋)
Intelligent Flexible Distributed Electric Vehicle Platform
Luo JianLuo YugongZhang ShuweiLi Keqiang
State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing,100084
In order to improve the scalable performance and the level of integration of the existing intelligent electric vehicle platforms,this paper proposed the overall structure of an electric drive flexible vehicle platform.Because of the open structure and modular part configuration,it was easy to change system parameters,to add new components and to upgrade parts,so fast realization and verification was possible.Simulation and experiments show that,the platform can be configured into many types to fulfill related experiments.
electric vehicle;intelligent environment-friendly vehicle;distributed electric drive vehicle;flexible platform design
2014-05-16
國家重點基礎研究發展計劃(973計劃)資助項目(2011CB711204)
U462.2DOI:10.3969/j.issn.1004-132X.2015.08.009
羅劍,男,1986年生。清華大學汽車工程系博士研究生。主要研究方向為車輛智能控制。羅禹貢,男,1974年生。清華大學汽車工程系副研究員。張書瑋,男,1988年生。清華大學汽車工程系博士研究生。李克強,男,1963年生。清華大學汽車工程系教授。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
