基于電阻陣列的紅外場景生成技術
2015-11-05 07:16:00高輝趙松慶2吳根水2陳海燕趙西帥中國空空導彈研究院制導控制系統研究所洛陽470092航空制導武器航空科技重點實驗室洛陽47009
航空學報 2015年9期
關鍵詞:模型
高輝*,趙松慶2,吳根水2,陳海燕趙西帥.中國空空導彈研究院制導控制系統研究所,洛陽 470092.航空制導武器航空科技重點實驗室,洛陽 47009
基于電阻陣列的紅外場景生成技術
高輝1,*,趙松慶1,2,吳根水1,2,陳海燕1,趙西帥1
1.中國空空導彈研究院制導控制系統研究所,洛陽471009
2.航空制導武器航空科技重點實驗室,洛陽471009
針對紅外成像制導半實物仿真試驗的需求,研究了紅外場景生成技術。主要通過對場景的建模、目標及場景的紅外特性分析,開展了基于可見光圖像調制生成紅外圖像技術的研究。同時對飛機、地面背景及紅外誘餌干擾的建模技術進行了探討,完善了紅外場景的生成方法。利用該紅外場景生成技術為基于電阻陣列的紅外圖像轉換器提供輸入信息,驅動電阻陣列產生紅外輻射,經熱像儀觀測,生成的圖像細膩、真實度高,為制導半實物仿真試驗提供了更為逼真的紅外仿真環境。
半實物仿真;紅外紋理生成;紅外場景建模;目標干擾建模;電阻陣列
http://hkxb.buaa.edu.cn hkxb@buaa.edu.cn
隨著紅外成像制導武器的不斷發展,紅外制導半實物仿真已成為制導武器系統的一種關鍵的實驗室評價工具。它從以往的試驗驗證手段,現已發展為設計、驗證和優化平臺,貫穿制導武器研制的全過程[1]。
在紅外半實物仿真測試中,可利用仿真系統為紅外制導系統提供與實際工作狀況相似的環境,需要構建的環境如下:
1)為彈體提供三維運動環境。
2)為紅外導引系統提供目標和背景的紅外輻射環境。
3)為舵機提供力矩環境。
上述3種環境分別由五軸轉臺、紅外目標模擬器和負載模擬器提供。此外,還需要仿真計算機和仿真總控臺,并且以光纖網絡作為整個半實物仿真系統的集成基礎,各個設備之間通過光纖進行數據通訊;仿真系統的時序邏輯控制由產品控制臺完成,目標和干擾的運動學模型計算由仿真計算機完成,目標生成控制由紅外場景生成系統的控制器完成。
作為紅外制導半實物仿真的關鍵部件,紅外場景生成系統為導引頭提供了動態的紅外目標和背景圖像,逼真地模擬了導彈發射過程中導引頭接收到的紅外輻射情況。紅外場景生成技術主要包含軟件和硬件兩方面,其中,軟件方面包括紅外場景的建模及目標紅外特性與運動特性建模,硬件則主要是紅外場景生成裝置。在半實物仿真過程中,圖像生成計算機調用事先建好的模型,賦予其紅外輻射亮度值,并將輻射亮度值轉化為驅動電壓,最終驅動紅外場景生成裝置生成紅外場景圖像以供導引頭接收[2]。
國外對紅外場景的仿真技術研究起步較早,不僅研制成功了多種類型的紅外場景生成裝置,同時也對場景建模及目標/背景的紅外特性進行了大量研究[3],建立了多個武器仿真中心,如美國陸軍航空和導彈司令部(AMCOM)所屬的高級仿真中心(ASC)、埃格林空軍基地(Eglin AFB)的空軍研究實驗室(AFRL)、陸軍試驗鑒定司令部(ATEC)所屬的紅石技術試驗中心(RTTC))、美國休斯公司、英國宇航公司以及法國軍事電子技術中心等代表歐美武器系統仿真領域的最高技術水平的仿真實驗室,均投入巨資開展紅外場景生成技術的研究。此外,國外還推出了一系列商用的紅外場景生成軟件,例如:JRMTechnology公司推出的Genesis MC材質分類軟件、環境仿真模塊Sigsim和傳感器仿真模塊Sensim等套件,可用于紅外場景的構建;法國OKTAL-SE公司開發的SE-Workbench-EO軟件,可以從物理原理上對各成像環節進行仿真,依據熱傳導方程計算不同材質的表面溫度,獲得目標和環境的紅外輻射亮度,再依據大氣環境等影響紅外輻射傳輸的條件構建由傳感器接收到的紅外場景。限于國外的技術封鎖,國內紅外場景生成技術與國外還存在較大差距,尤其是基礎理論方面,對目標特性的認識還存在一定的不足,工程化應用有限[4-7]。本文針對紅外制導空空導彈半實物仿真試驗的需求,對基于電阻陣列的紅外場景生成技術進行了研究。
1 紅外場景建模
對紅外場景的建模采用三維建模方法,即利用計算機在滿足需要的精度上對整個場景進行建模,然后設置投影平面(類似于一個攝像機的像面),采用三維到二維的投影算法計算場景在該投影平面上的二維圖像。此外,還必須對場景中各個物體間相互遮擋的情況加以考慮,最終生成完善的符合幾何成像關系的場景[8]。
1.1 處理流程
紅外場景仿真的真實感意味著仿真結果在客觀上符合實際物理過程,滿足應用必需的準確度。紅外紋理的真實感很大程度上決定了仿真的真實感。為此,場景的渲染應采用符合紅外輻射傳輸過程的動態紅外圖像生成模型,以體現場景的紅外物理特征。為了實時、準確地生成動態紅外場景,需要建立各種環境條件下的地面不同材質的表面宏觀均值溫度生成模型,以計算仿真對象的宏觀均值溫度,并進一步采用基于可見光圖像的紅外紋理細節調制方法,對溫度場進行微觀調制,生成物體表面溫度分布微觀特征。對于目標溫度,則根據已有其他目標數據進行外推擴展,生成目標的溫度分布。最后,進一步結合物體表面的紅外發射率和反射率等特征,將輻射特征編碼成DDS(Direct Draw Surface)格式紋理,用于后期動態紅外場景驅動程序中圖形處理器(GPU)的實時采樣,計算出包含環境反射、大氣透過率和大氣路徑輻射等效應的物體表面仿真紅外輻射值,生成高真實感的紅外仿真場景。
1.2 基于可見光圖像調制的紅外紋理生成
紅外紋理的生成首先應建立紅外材質庫,基于熱平衡方程對地面不同材質建立熱物理特性預測理論模型,并根據已有數據對目標進行外推擴展,建立紋理的宏觀溫度場分布。通過人工調節的方法設計紅外紋理的微觀細節,以應用于三維紅外景象設計與集成[9]。具體的物體表面紅外紋理生成流程如圖1所示。
根據物體表面紅外紋理生成的設計概念和處理流程,可將物體表面紅外紋理生成流程分為4個大的模塊:宏觀均值溫度生成模塊、微觀紋理特性生成模塊、編碼存儲數據模塊及輸入輸出模塊。相應的軟件總體結構如圖2所示。
1)宏觀均值溫度生成
即從宏觀角度實現溫度空間分布。由于目標和地形的不同區域因環境條件和自身物理特性等的區別,其溫度的整體(均值)變化是非常劇烈的。但在時間較短的仿真中,其變化很小,為簡化問題處理,通常可認為溫度均值不變,從而能夠建立不同區域和溫度均值的對應關系。
2)微觀紋理特性生成
對紅外紋理數據進行后處理時,由于不同材質之間不停地進行熱傳遞,溫度沒有明顯的梯度變化,都是漸變的過程,所以紅外圖像的邊緣是模糊的。因此,按照鄰域平均方法對邊界周圍的均值溫度和發射率進行過渡處理。假設要計算坐標為(x,y)的像素C 的溫度值Tx,y,鄰域半徑取為r,則有

圖2 基于可見光圖像調制的紅外紋理生成軟件結構Fig.2 Structure of infrared radiation texture generation software based on visible light image modulation

式中:i和j為鄰域內的相對坐標。在均值溫度上疊加溫度擾動,使物體表面輻射分布發生起伏,可以實現紅外紋理細節信息的增加。由于可見光紋理和紅外紋理在空間分布上具有一定的相似性,將可見光對應像素的RGB分量按照適當的權重進行加權平均,然后疊加在均值溫度值上,實現微觀紋理特征調制。調制溫度T的計算方法為

式中:Taverage為均值溫度;α為調制因子,通過調節α可以改變紅外紋理細節的多少,α越大,細節信息越多;G為處理后的可見光圖像上某個像素點的灰度值,取值范圍為0~255。
3)編碼存儲數據
由于均值溫差和發射率都是浮點型數據,可采用Direct3D的DDS紋理格式實現數據編碼。如上所述,表面紅外紋理的每個像素應包含場景區域類型、均值溫差和發射率等內容,因此應組織成四通道32位浮點型DDS紋理以保證數據精度。
4)輸入和輸出
軟件的輸入數據為需要生成對應紅外紋理的可見光圖像,格式為*.bmp、*.jpg和*.png。在軟件中就是對可見光圖像進行框選,賦溫度、發射率和反射率等信息,最終將其轉換為包含紅外數據的DDS格式紋理。
輸出數據為表面紅外紋理每個像素應包含的場景區域類型、均值溫差和發射率等內容。由于溫度值應該是浮點數,因此應組織成四通道32位浮點型DDS紋理以保證數據精度。其中,采用紋理像素的R通道保存場景區域類型信息,G通道保存均值溫差信息,B通道保存發射率信息,A通道在生成煙霧等具有一定透過率的材質的紋理時,用來表征其透過率信息。
1.3 三維紅外景象設計與集成
通過圖形圖像工具和三維建模工具針對三維紅外景象的不同內容建立景象的幾何模型。并通過UVW貼圖等三維貼圖手段將模型的紋理映射模型上,完成整個場景中景象的設計,最終將整個場景的集成規劃根據場景要求輸出相應的模型和地形文件。
1.3.1 飛機目標建模
根據典型目標的幾何參數,使用3DS MAX和MultiGen Creator等三維建模軟件完成三維目標獨立模型的建立,并最終導入到3D MAX中統一為max文件的三維目標模型,同時為之賦予實拍或者仿真生成的紋理,以得到比較真實的目標模型。根據目標幾何特征,在建模時通常可將目標分為剛體或柔性體。
1)機體建模
根據飛機目標的真實幾何信息,利用3DS MAX和MultiGen Creator等三維建模工具建立飛機三維模型。需要根據要求調節模型的復雜度,即注意模型的三角形個數。構成模型的三角形個數越多,模型就越逼真,但這樣會消耗過多的資源。因此,模型精細程度需要與資源達到一個平衡。
利用紅外紋理生成軟件,根據飛機機體不同位置的溫度和發射率等信息,生成相應的紅外紋理。然后,將生成的紅外紋理映射到所建的飛機模型中。
2)尾焰建模
由于飛機尾焰屬于流體,和剛性的蒙皮表面不同,它沒有一個明顯的表面的概念,很難使用幾何模型來表達,所以不能用對剛體建模的方法來構造尾焰模型,故對于飛機尾焰這類流體目標擬采用Billboard技術進行建模。
①Billboard技術
Billboard廣泛應用于三維場景仿真技術中。一個Billboard實際上就是一個始終面向觀察者的平面,通常為一個四邊形。其朝向隨著Billboard和觀察者的移動而不斷的改變。
將飛機尾焰視為一個四邊形Billboard處理,飛機軸線位于該四邊形所在的平面上,并且尾焰Billboard能且只能沿著該軸線旋轉;由于飛機在三維空間中的位置和姿態可以隨意變化,其軸線也可以任意改變,所以可用任意軸Billboard來模擬飛機尾焰[10-12]。
在模擬飛機尾焰時,根據尾焰和機體的相對位置以及機體的世界坐標系變換矩陣,能夠實時計算出尾焰中心在世界坐標系中的位置;然后,再根據視空間變換矩陣,可計算出觀察者的位置;最后,求得尾焰的世界坐標系變換矩陣,從而使尾焰Billboard被正確旋轉,使其朝向一直面對著觀測者。
②動態尾焰紋理
典型的Billboard技術并不能完全滿足仿真試驗的要求,因為隨著飛行速度和觀察角度的不同,飛機的尾焰輻射并不相同,所以Billboard上映射的紋理應該使用動態插值生成的圖像。因為試驗條件的限制,只能獲得一些特定速度和角度的尾焰輻射數據,因此必須從這些特定速度和角度對應的輻射數據出發,在給定速度和角度范圍內插值生成其他速度和角度對應的尾焰數據,編碼后作為Billboard的紋理信息。該算法流程具體如下。
步驟1根據飛機當前的飛行速度v查詢紋理文件,找到最臨近的飛行速度對應的輻射數據;由于與飛行速度嚴格對應的輻射數據很少,可假定速度是離散取值的,其間隔為10 m/s,并認為落在這一間隔中的所有速度是相等的。
步驟2根據當前的觀察角度θ,在步驟1所找到的輻射數據中,查找最臨近角度θ1和θ2所對應的輻射數據(θ2≥θ1)Dθ1和Dθ2。
步驟3計算權重因子F1和F2:

步驟4對于尾焰頂點對應的紋理坐標(U,V),計算角度θ對應的輻射數據:

③尾焰紋理擾動
尾焰并不是一個剛體,其形狀會隨著時間不斷變化,這種動態效果可以通過擾動進行模擬。一般說來,尾焰垂直方向的擾動很小,可以忽略不計,只需模擬水平方向的擾動效果即可。
擾動也是通過紋理映射的方法實現的。首先用分形方法生成一張隨機擾動紋理,為8位的灰度圖像。定義擾動速度S(U,V),得到任意時刻t對應的擾動紋理坐標K′(U,V)為

最后將K′(U,V)歸一化,得到K(U,V)。利用紋理坐標(U,V)對所得的擾動紋理進行查找,得到擾動的臨時值N∈[0,1]。然后定義一個擾動的大小D∈[0,1],利用式(7)可得到最終的擾動值P∈[0,1]為

最后,將擾動值P加到尾焰的水平紋理坐標U上,得到的尾焰在水平方向上將具有動態效果。
1.3.2 地面背景建模
對于屬于開放式場景的戰場環境,其建模流程通常為:將高程數據轉化為灰度高程圖像;將灰度高程圖像導入三維建模工具3DS MAX,利用地形生成插件修改調節各種參數,采樣生成幾何地形網格;基于高程圖像進行地貌規劃,生成地貌分布特征。
1)數字高程數據處理
對于實際測量的高程數據,目前廣泛應用的數據格式主要有美國國家影像和制圖局(NIMA)的DTED數據、美國國家地質調查局(USGS)的DEM以及DLG數據等。這些數據格式將對高度數據編碼描述,并且有些數據格式(如DLG數據)還包括地表特征的描述。實測數據主要用于對實際場景的復現。
應采用數字高程信息處理軟件對具體格式進行相應的解碼轉換和高程解析,截取所需大小的場景生成3DS MAX中可用的高程灰度圖像,如圖3所示。
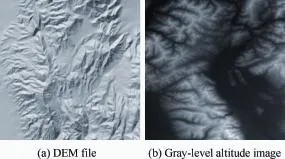
圖3 DEM數據處理Fig.3 Process of DEM data
2)高程灰度圖到三維網格的轉化
DEM數據最終要用三角形面的拼接來實現三維化。通過對高程數據作二次采樣,并選擇一個適當的算法,實現地形的三角化。
能將高程灰度圖轉化為地形網格的工具有很多,例如可通過3DS MAX軟件中的DREAMSCAPE工具生成地形網格,或是利用MultiGen Creator軟件生成地形網格。對幾何地形三維網格還需進行細節修改,包括清除褶皺和縫隙等瑕疵。
對于幀頻為200 Hz的要求,需要對地形進行三角面片的合并和簡化;如果對逼真度要求較高,則可以使用簡化的網格模型。
3)進行地貌規劃
通常需要結合背景高程特征進行地貌、地物規劃,以確定各類地貌的分布,如圖4所示。

圖4 總體地貌和地物規劃圖Fig.4 Image of overall physiognomy and landform
然后根據總體地貌和地物規劃圖,利用Photoshop等工具,制作分類地貌區域分布圖,為地形紅外紋理映射階段的工作提供基礎數據。針對規劃的地貌分布,可得到相應的分類地貌區域分布圖,如圖5所示。
4)集成設計
在建模階段,因進行目標和背景設計時所采用的3DS MAX和PhotoShop等軟件功能所限,必須采用普通的紋理格式進行可見光紋理映射。而紅外紋理所采用的DDS格式是特定編碼,無法直接應用于三維建模,而是在渲染過程中與模型進行綁定。因此,需要以可見光紋理為中介,建立紅外紋理和三維景象綁定關系,完成三維紅外景象集成設計。
直接利用現有的高程數據,經轉換和處理后生成所需地形圖的方法簡單易行,操作性強,可以生成較復雜的場景,減少了圖形工作站的運算時間,提高了效率。

圖5 分類地貌區域分布Fig.5 Area distribution of physiognomy divisions
1.3.3 誘餌干擾建模
分析紅外誘餌彈干擾紅外成像制導武器誘騙目標的基本原理,對紅外誘餌彈在發射后及燃燒單元的運動模型和軌跡方程進行建模,對紅外誘餌彈的紅外輻射特性進行實測建模。
在紅外誘餌彈建模方法的選擇上,采用基于粒子系統與Billboard紋理映射相結合的方法來模擬動態誘餌彈,使模型效果的真實性大大提高[13-14]。
利用Billboard技術和紅外紋理映射的方法(幀頻要求為200 Hz)或利用Billboard技術、粒子系統和紅外紋理映射的方法(幀頻要求較低)在OGRE平臺中實現對紅外誘餌彈燃燒效果的仿真。
1)紅外誘餌彈的空間分布建模
誘餌彈從載體(飛機、軍艦)上投放到空中后,其煙火劑經點燃后迅速燃燒,形成紅外輻射假目標。根據紅外誘餌出膛后發生燃燒反應的微元體初速度、加速度、風力和阻力等因素分析誘餌彈的運動軌跡數學模型,求出紅外誘餌彈的速度方程,并對燃燒單元爆炸時的空間分布進行建模。
圖6為紅外誘餌彈發射后的運動軌跡。紅外誘餌彈在運動過程中主要受發射時與地面的夾角、初速度、重力、阻力和風力等的影響。紅外誘餌彈出膛后發生燃燒反應的微元體質量為m,重力加速度為g,投射力轉化為初速度。假定發射器相對飛機X軸、Y軸和Z軸的安裝位置為坐標原點,紅外誘餌彈在飛機中心位置沿飛機軸線向后發射,如果紅外誘餌彈的發射方向為其他方向,可通過相應的坐標變換轉換到沿飛機軸線向后的發射方向。紅外誘餌作為橢圓體的點源,主要受到升力、阻力、投射力和地球引力影響,其中,阻力和升力是紅外誘餌幾何形狀、速度、質量和大氣密度的函數。紅外誘餌彈發射以后,主要受重力、空氣阻力和自然風的影響。
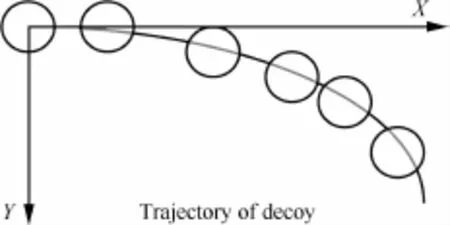
圖6 紅外誘餌彈發射后的運動軌跡Fig.6 Trajectory of decoy after launched
2)紅外誘餌彈輻射特性模型建模
紅外誘餌彈被拋射點燃后產生高溫火焰,并在規定的光譜范圍內產生強紅外輻射,從而欺騙或誘惑敵紅外探測系統或紅外制導系統。紅外誘餌彈從點燃開始到輻射強度達到額定值的90%時所需的時間稱為起燃時間。無論誘餌彈在起燃時間后的輻射強度如何變化,其在誘餌彈剛燃燒時總會存在一個劇烈上升的過程。在起燃時間內,各種型號誘餌彈的輻射強度基本上是直線上升的,然后隨著誘餌彈燃料不斷消耗,輻射強度逐漸下降直到消失。
由于紅外誘餌彈的燃燒成分較為復雜,其核心部分的紅外輻射介于灰體和氣體之間,因此,對其精確建模的難度較大。考慮到仿真過程中關心的只是不同投放高度及投放速度下的誘餌彈輻射亮度和形體隨距離與時間的變化規律,因此,可采用簡化方法實現。實測數據表明,多數情況下誘餌彈在圖像上表現為近似球形,故可設定誘餌彈在圖像表現上為灰度均勻的圓形。在建模時,誘餌彈燃燒單元紅外輻射的變化特性主要是以試驗測試數據為基礎,通過對大量燃燒單元的點燃實驗,獲得誘餌彈輻射強度隨投放高度的變化曲線、隨投放速度的變化曲線以及其隨時間變化的動態輻射強度曲線,進而獲得一定投放高度和投放速度下的動態輻射強度曲線。利用導引頭實測誘餌干擾彈近距動態燃燒的圖像形體隨時間變化的曲線,并依據朗伯余弦定理中輻射強度、輻射亮度及視線方向投影面積的關系獲得誘餌干擾的輻射亮度曲線。最后將其轉換為紅外圖像。在本文仿真過程中,以常用的實測紅外誘餌彈輻射特性數據進行建模,求出輻射強度和溫度隨時間變化的動態輻射強度曲線。
3)紅外誘餌彈幾何模型建立
在OGRE平臺中利用粒子系統模型能夠很好地體現不規則模糊物體的動態性和隨機性[15]。但考慮實時性對幀頻的要求,對于幀頻為200 Hz的要求可采用Billboard技術進行誘餌彈的建模;如果對于逼真度要求較高,則可以采用Billboard技術與粒子系統并用進行建模,并在此基礎上利用粒子重用技術、Billboard技術與紋理映射技術對誘餌彈模型進行優化。粒子系統在OGRE渲染的基本流程如圖7所示。
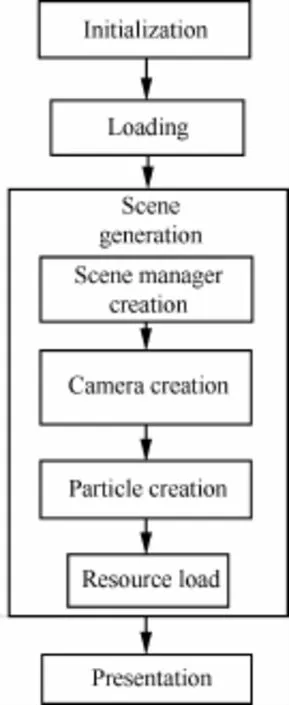
圖7 OGRE渲染流程圖Fig.7 Flow chart of OGRE rendering processing
OGRE初始化部分主要完成程序中對OGRE所需管理器(如場景管理器、資源管理器、材質管理器和紋理管理器)的初始化工作等。加載資源部分主要完成對所需資源的調用以及相應腳本的解析。創建場景部分主要完成相機的創建和粒子系統各部分模塊的加載。最后,場景管理器利用渲染隊列將創建好的資源以一定的順序渲染到窗口中并顯示出來,完成三維圖像的顯示。
4)OGRE粒子系統
OGRE引擎在渲染場景特效時,需調用內部的粒子系統模塊。粒子系統模塊根據內部設置的粒子屬性,在粒子的生命周期內實時更新粒子,并將每一幀的結果實時渲染出來,給人以動態變化的視覺特效[16-17]。OGRE粒子系統內部設置關系如圖8所示。

圖8 OGRE粒子系統設置圖Fig.8 Scheme of OGRE particle system setting
利用粒子系統內部各模塊間的相互作用,可以實現誘餌彈的擴散、旋轉和受力等多種特效,且效果十分符合真實的情況。
5)大氣輻射傳輸建模
該模塊借助MODTRAN計算模型實現大氣輻射傳輸特性計算,滿足其他模塊的需求。由于大氣計算的運算量大,無法在反演或重構時進行實時計算。本模塊根據給定參數預先計算出大氣路徑透過率、路徑輻射和天空背景輻射,并編碼存儲為紋理圖像,以滿足仿真時在物體自身輻射基礎上實時疊加大氣效應的需求。
另外,根據輻射統計特性獲得積云的輻射周視環面分布場,再利用可編程渲染管線對晴空背景輻射紋理進行采樣,與云輻射圖結合,量化輸出天空背景輻射。
2 實時圖像生成及電阻陣列驅動控制
基于GPU的實時圖像生成模塊的主要功能是建立符合紅外輻射傳輸過程的“目標-背景-大氣”綜合模型,根據用戶輸入參數和控制,生成滿足用戶需求的三維紅外場景圖像。在實時網絡圖像生成模式下,程序按照仿真條件加載相應的紅外輻射紋理數據、目標及背景三維模型等資源,完成場景的初始化。然后根據輸入控制解算模塊解算出的控制信息對導彈方位和導彈姿態角實時進行調整,再使用OGRE渲染引擎將數據送入GPU中進行渲染,生成本征紅外輻射場景。之后,采用集成的大氣輻射傳輸模塊,添加大氣衰減和路徑輻射對場景的影響,最終完成動態三維紅外場景圖像的渲染工作。在本機圖像生成模式下,程序按照仿真條件加載相應的紅外輻射紋理數據、目標及背景三維模型等資源,完成場景的初始化。然后,程序根據用戶輸入的參數對導彈和目標的方位和姿態角進行控制,再使用OGRE渲染引擎將數據送入GPU中進行渲染,生成本征紅外輻射場景。接著采用集成的大氣輻射傳輸模塊,添加大氣衰減和路徑輻射對場景的影響,最終完成動態三維紅外場景圖像的渲染工作。整個動態紅外圖像生成流程如圖9和圖10所示。
最終的紅外場景圖像數據由渲染管線輸出后,一般是直接送入后臺緩存(Background Buffer)中,然后再通過交換送至前臺顯示出來。
圖11為GPU體系結構。從圖11中可以看出,系統內存中的幾何形體數據和紋理數據被送入顯存當中并通過GPU渲染管線完成渲染。幾何形體數據由顯存直接送入頂點處理器,而紋理數據則需要由片段處理器中的采樣器以采樣的方式送入渲染管線參與計算。渲染完成后的結果數據被送入到幀緩沖器中用來顯示,還可以由幀緩沖器輸出到顯存中以紋理的形式保存。
由OGRE渲染引擎實時渲染到屏幕上的紅外場景數據,以圖像數據的形式存在于每一幀渲染前的GPU緩存中。首先通過圖像數據輸出模塊完成從GPU的緩存中實時高幀頻提取紅外場景圖像數據到內存中的工作,然后通過實時網絡對內存中數據進行動態傳輸。數據傳輸流如圖12所示。

圖9 實時網絡圖像生成模式流程圖Fig.9 Flow chart of real-time network image generation scheme
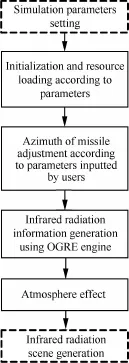
圖10 本機圖像生成模式流程圖Fig.10 Flow chart of local image generation scheme
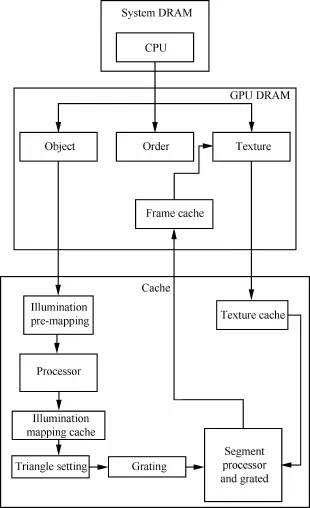
圖11 圖形處理器(GPU)體系結構Fig.11 Architecture of graphics processing unit(GPU)
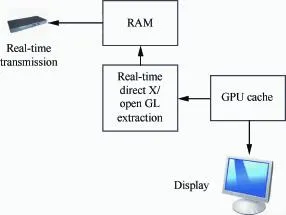
圖12 數據傳輸流圖Fig.12 Scheme of data transmission
圖像數據通過驅動控制系統轉換為電信號,驅動基于MOS電阻陣列的圖像轉換器硬件工作,產生紅外場景圖像。
電阻陣列的工作原理是通過電流加熱電阻單元從而產生紅外輻射,利用微電子技術和CMOS工藝在硅片上制造大規模的微型電阻陣列;每個電阻單元構成一個像素點,可以被單獨選址并施加不同的驅動電流。同時,每個電阻單元在設計上都盡量與周圍的單元進行隔熱化處理,并且芯片輔以半導體制冷器件和水冷裝置進行散熱。這樣,通過控制不同電阻單元的驅動電流就能產生動態的、溫度可變的紅外圖像。
電阻陣列的紅外輻射強度隨時間的變化是階躍式的,每個像元的溫度在沒有被驅動電流驅動的時候始終保持不變,只有施加驅動電流時才會產生熱輻射;同時,由于散熱裝置的存在,電阻單元會達到一個熱平衡狀態。一旦驅動電流停止,熱量會迅速被帶走;電流發生改變時電阻單元會重新達到一個熱平衡狀態,從而產生另一種不同強度的輻射。
電阻陣列驅動控制系統主要包括:電源供電模塊、圖像傳輸模塊、信號轉接模塊、D/A驅動模塊、前端邏輯處理模塊、環境控制系統(包括抽真空系統和冷卻系統)和計算機系統。圖13為紅外圖像生成系統的結構框圖。
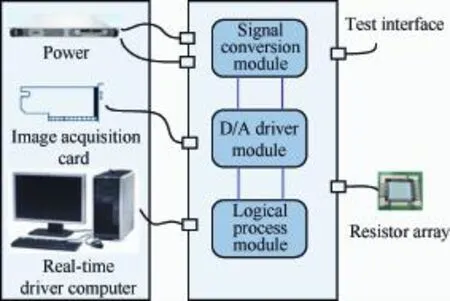
圖13 紅外圖像生成系統的結構框圖Fig.13 Structure diagram of infrared radiation image generator system
其中,電源系統主要完成電阻陣列和驅動系統的供電;圖像數據傳輸系統主要完成圖像數據在計算機與前端驅動盒之間的交互;信號轉接板主要完成電阻陣列前端驅動盒內的信號轉接,實現電源及信號的轉接和互連;接受電阻陣列驅動邏輯電路的控制,按照指定時序控制D/A的驅動,并完成模擬信號的調理工作;邏輯處理模塊位于圖像數據傳輸板和D/A板之間,準確接收由圖像數據并對其進行緩沖處理,并準確提取圖像數據,完成電阻陣列的驅動邏輯設計;環境控制系統主要用于保證電阻陣列工作的真空環境和低溫環境[18-20]。
3 與線下圖像生成技術的比較
目前半實物仿真試驗中圖像的生成多依靠線下生成、試驗中播放的方式實現。
目標模型的建立是通過圖像生成計算機來實現的,主要包含以下幾個步驟:①確定仿真目標的參數,如當前主流戰機蘇27、F15等目標的形體尺寸特征、紅外輻射特征以及干擾投放方式等資料;②根據目標的形體特性建立三維模型;③建立目標及干擾的輻射模型,包括機體溫度分布、能量衰減及校正等;④建立目標的飛行數據,包括彈目距離、姿態角等的變化、干擾的投放,以及運動軌跡求解;⑤合并生成驅動文件。
對目標三維模型的建立是通過建模軟件3DS MAX來實現的。根據典型目標形體特征按比例進行建模,建模尺寸與實際目標尺寸相同。由于機體各部位紅外輻射情況不一致,因此在建模時應將機體分為多個不同的區域,以便賦予不同的溫度,模型分塊如圖14所示。

圖14 模型分塊圖Fig.14 Partitions of module
通過外場實測數據或商業軟件仿真得到的數據對每個分塊賦予不同的溫度值,完成飛機形體及紅外特性建模。通過輸入彈道飛行時間,起始位置和終點位置目標的距離,偏航角、俯仰角和滾轉角等姿態數據,以及誘餌彈的投放參數等生成目標及干擾的飛行數據腳本文件,最終將目標和干擾的三維模型、飛行數據腳本文件及其輻射特性進行合并后生成圖像驅動文件序列,驅動目標模擬器生成動態紅外圖像。
這種生成方式操作較為繁瑣,僅能生成背景較干凈的飛機和干擾等的圖像,對復雜場景如空中云層、地面物體等背景則難以生成。此外,由于區域分割較粗糙,會導致圖像灰度沒有自然過渡,缺乏層次感,逼真度較差。一旦條件發生更改,還需要重新生成圖像文件,效率十分低下。而文中研究的實時紅外場景生成技術可以很好地克服線下生成圖像的不利因素,實時、高效地生成更為逼真的目標和復雜多樣的紅外場景,簡化了場景生成的流程,大幅提高了仿真試驗的效率。
4 技術應用效果
本文所提的紅外場景生成技術解決了實時圖像生成及電阻陣實時驅動問題,能夠實時、快速地驅動電阻陣生成紅外圖像以供紅外成像制導武器接收。通過熱像儀對圖像進行采集,得到如圖15和圖16所示的圖片。
圖15為電阻陣列生成的3架飛機在山地背景飛行的效果,底部的山地及遠處的地平線富有層次感,整個場景較為真實。圖16為生成的某型戰機不同姿態下的紅外圖像及投放干擾的效果。在圖16中,戰機不同區域有著不同的溫度分布,紋理細節較為豐富。

圖15 飛機及地形的紅外圖像Fig.15 Infrared radiation scene of airplanes and terrain

圖16 飛機細節及干擾彈的紅外圖像Fig.16 Infrared radiation images of airplanes’textures and flares
5 結論
1)該紅外場景生成技術解決了紅外場景實時生成在半實物仿真系統中的應用集成問題,并通過多模式的動靜態仿真和測試試驗對算法進行了驗證。
2)克服了以往須事先生成紅外圖像序列或圖像數據,然后在試驗中播放的繁瑣流程,簡化了人工操作,極大地提高了試驗效率。
3)采用基于可見光圖像調制的紅外紋理生成技術生成細膩的物體紅外紋理,豐富了生成的目標的細節,使目標更為逼真。
4)由于利用現有的高程數據生成較復雜的場景,減少了圖形工作站的運算時間,提高了運算速度,滿足了高幀頻條件下的實時圖像生成。
5)將該紅外場景生成技術應用于多種型號的半實物仿真試驗中,取得了良好的效果。
[1]Gao H,Zhao S Q.Exploration of applications of IR image simulator[J].Infrared Technology,2014,36(5):409-414(in Chinese).
高輝,趙松慶.紅外成像目標模擬器的應用探索[J].紅外技術,2014,36(5):409-414.
[2]Zhao X S,Wu G S,Zhao S Q,et al.Target image generation technology in the infrared imaging guidance hardware-in-the-loop simulation[J].Measurement & Control Technology,2013,32(7):153-156(in Chinese).
趙西帥,吳根水,趙松慶,等.紅外成像制導半實物仿真目標圖像生成技術[J].測控技術,2013,32(7):153-156.
[3]Chen Y.Study on the simulation of multispectral infrared images[D].Wuhan:Huazhong University of Science and Technology,2011(in Chinese).
陳云.紅外多光譜圖像仿真研究[D].武漢:華中科技大學,2011.
[4]Gerhart G,Martin G,Gonda T.Thermal image model [C]//Proceedings of SPIE.Bellingham,WA:SPIE,1987:3-9.
[5]Jr Sheffer AD,Michael Cathcart J,Faust N L.Highfidelity infrared scene simulation at Georgia Tech[C]// Proceedings of SPIE.Bellingham,WA:SPIE,1996:142-152.
[6]Savage J,Coker C,Thai B,et al.IRMA 5.1 multi-sensor signature prediction model[C]//Proceedings of SPIE.Bellingham,WA:SPIE,2005:199-211.
[7]Latger J,Cathala T,Douchin N.Simulation of active and passive infrared images using the SE-WORKBENCH[C]// Proceedings of SPIE.Bellingham,WA:SPIE,2007:654302-1-15.
[8]Shao X P,Zhang J Q,Xu J.Study of modeling natural infrared textures[J].Journal of Xidian University,2003,30(5):612-616(in Chinese).
邵曉鵬,張建奇,徐軍.一種自然紅外紋理的生成方法[J].西安電子科技大學學報,2003,30(5):612-616.
[9]Huang X,Zhang J Q,Zhang S Z,et al.Realistic infrared image generation method of target[J].Infrared and Laser Engineering,2013,42(4):1084-1088(in Chinese).
黃曦,張建奇,張紹澤,等.目標高真實感紅外圖像生成方法[J].紅外與激光工程,2013,42(4):1084-1088.
[10]Xu C S,Zhang J Q.Study of plane wake IR simulation based on the particle system[J].Electronic Science and Technology,2009,22(8):59-61(in Chinese).
許春圣,張建奇.基于粒子系統的飛機尾焰紅外仿真方法研究[J].電子科技,2009,22(8):59-61.
[11]Reeves W T.Particle systems—A technique for modeling a class of fuzzy objects[J].ACMTransaction on Graphics,1983,2(2):91-108.
[12]Li Q C,Yang G B,Wang X J.Particle system based fireworks modeling and its algorithm simulation[J].Journal of System Simulation,2009,21(8):2179-2184(in Chinese).
李清暢,楊高波,王小靜.基于粒子系統的焰火建模及其算法仿真[J].系統仿真學報,2009,21(8):2179-2184.
[13]Hong Y,Zhang K,Li Y J.Simulation and jamming model of infrared bait[J].Journal of System Simulation,2006,18(2):463-466(in Chinese).
洪洋,張科,李言俊.紅外誘餌的干擾模型與仿真[J].系統仿真學報,2006,18(2):463-466.
[14]Jin Z Z,Du WH,Wang X,et al.The research of infrared decoy modeling and visual simulation[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(6):31-38(in Chinese).
金政芝,杜文紅,王星,等.紅外誘餌彈建模與視景仿真實現研究[J].彈箭與制導學報,2010,30(6):31-38.
[15]Sun Y,Li XY,Li M.Study on GPU combined OGRE technology in infrared scene simulation[J].Journal of System Simulation,2013,25(8):1935-1939(in Chinese).
孫云,李曉燕,李敏.GPU結合OGRE技術在紅外場景仿真中的應用研究[J].系統仿真學報,2013,25(8):1935-1939.
[16]Cai Z C,Wei Z,Ling Y,et al.Research based on OGRE particle system rending of fireworks[J].Computer Technology and Development,2011,21(10):88-91(in Chinese).
蔡政策,魏臻,凌勇,等.基于OGRE粒子系統在煙花渲染中的研究[J].計算機技術與發展,2011,21(10):88-91.
[17]Reeves W T,Blau R.Approximate and probabilistic algorithms for shading and rending structured particle system [J].Computer Graphics,1985,19(3):313-322.
[18]Huang Y,Wu G S,Zhao S Q,et al.Research of driver method for 256×256 MOS resistor array[J].Aero Weaponry,2013(6):39-42(in Chinese).
黃勇,吳根水,趙松慶,等.256×256元MOS電阻陣驅動方法研究[J].航空兵器,2013(6):39-42.
[19]Zhang A J,Wang S C,Zhang J S,et al.Design of a realtime image generating system for simulation of IR imaging guidance missiles[J].ElectronicsOptics & Control,2007,14(1):91-95(in Chinese).
張安京,王仕成,張金生,等.紅外成像制導仿真圖像實時生成系統設計與研制[J].電光與控制,2007,14(1):91-95.[20]Li R,Dong M Z.Study on real-time control of IR imaging
simulator based on high frame rate MOS resistor arrays
[J].Aero Weaponry,2009(6):50-53(in Chinese).
李睿,董敏周.高幀頻MOS電阻陣紅外成像目標模擬器實時控制研究[J].航空兵器,2009(6):50-53.
高輝 男,碩士,工程師。主要研究方向:紅外目標與環境特性半實物仿真。
Tel:0379-63383925
E-mail:gaohuialex@163.com
趙松慶 男,碩士,高級工程師。主要研究方向:紅外目標與環境特性半實物仿真。
Tel:0379-63383925
E-mail:zsq_5198@sina.com
吳根水 男,研究員。主要研究方向:紅外制導系統半實物仿真。
Tel:0379-63383925
E-mail:genshuiwu@163.com
陳海燕 女,工程師。主要研究方向:紅外目標與環境特性半實物仿真。
Tel:0379-63383925
E-mail:36337728@qq.com
趙西帥 男,碩士,工程師。主要研究方向:紅外目標與環境特性半實物仿真。
Tel:0379-63383925
E-mail:344958762@qq.com
URL:www.cnki.net/kcms/detail/11.1929.V.20150616.1559.002.html
lnfrared radiation scene generation technology based on resistor array
GAO Hui1,*,ZHAO Songqing1,2,WU Genshui1,2,CHEN Haiyan1,ZHAO Xishuai1
1.Department of Guidance & Control System,China Airborne Missile Academy,Luoyang 471009,China
2.Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons,Luoyang 471009,China
According to the requirements of the infrared radiation imaging guidance hardware-in-the-loop simulation test,the technology of infrared radiation image generation was researched.The infrared image generation technology based on visible light modulation method was developed,including scene modeling,infrared radiation character of target and scene analysis. Meanwhile,the airplane,terrain and the infrared decoy modeling technology were discussed,and the method of infrared radiation scene generation was consummated.As the input information of the resistor array,the infrared radiation scene data,which was generated by the technology discussed in the paper,can drive the resistor array generate the infrared radiation scene.The infrared radiation scene that was detected by the infrared radiation camera,was fine and close to the reality,which can provide more accurate environment for infrared radiation imaging guidance hardware-in-the-loop simulation test.
hardware-in-the-loop simulation;infrared radiation texture generation;infrared radiation scene modeling;target and decoy modeling;resistor array
2015-01-16;Revised:2015-04-15;Ac cepted:2015-06-07;Published online:2015-06-16 15:59
.Tel.:0379-63383925 E-mail:gaohuialex@163.com
V249
A
1000-6893(2015)09-2815-13
10.7527/S1000-6893.2015.0172
2015-01-16;退修日期:2015-04-15;錄用日期:2015-06-07;網絡出版時間:2015-06-16 15:59
網絡出版地址:www.cnki.net/kcms/detail/11.1929.V.20150616.1559.002.html
.Tel.:0379-63383925 E-mail:gaohuialex@163.com
引用格式:Gao H,Zhao S Q,Wu G S,et al.lnfrared radiation scene generation technology based on resistor array[J].Acta Aeronautica et Astronautica Sinica,2015,36(9):2815-2827.高輝,趙松慶,吳根水,等.基于電阻陣列的紅外場景成技術[J].航空學報,2015,36(9):2815-2827.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
