基于傳輸線理論的機(jī)上電纜斷點(diǎn)定位儀設(shè)計(jì)
2015-11-11 17:22:31應(yīng)朝龍海軍航空工程學(xué)院基礎(chǔ)實(shí)驗(yàn)部研究生管理大隊(duì)山東煙臺(tái)264001
海軍航空大學(xué)學(xué)報(bào) 2015年2期
應(yīng)朝龍,李 超,楊 凡(海軍航空工程學(xué)院.基礎(chǔ)實(shí)驗(yàn)部;.研究生管理大隊(duì),山東煙臺(tái)264001)
?
基于傳輸線理論的機(jī)上電纜斷點(diǎn)定位儀設(shè)計(jì)
應(yīng)朝龍a,李超b,楊凡b
(海軍航空工程學(xué)院a.基礎(chǔ)實(shí)驗(yàn)部;b.研究生管理大隊(duì),山東煙臺(tái)264001)
摘要:在分析目前機(jī)上電纜傳統(tǒng)測(cè)試方法所存在的弊端的基礎(chǔ)上,針對(duì)當(dāng)前自動(dòng)測(cè)試系統(tǒng)未解決的機(jī)上電纜測(cè)試問(wèn)題,提出了一種基于傳輸線理論的機(jī)上電纜斷點(diǎn)位置測(cè)試方法,給出了斷點(diǎn)定位儀硬件電路設(shè)計(jì)和誤差分析方法,并對(duì)誤差分析得到的相關(guān)參數(shù)進(jìn)行了仿真實(shí)驗(yàn),根據(jù)仿真結(jié)果,給出斷點(diǎn)定位儀的優(yōu)化方法,可實(shí)現(xiàn)對(duì)機(jī)上電纜斷點(diǎn)的精準(zhǔn)定位。
關(guān)鍵詞:機(jī)上電纜;傳輸線原理;斷點(diǎn)定位;鑒相誤差
隨著機(jī)載電子設(shè)備的不斷發(fā)展,對(duì)其可靠性要求越來(lái)越高,機(jī)載自動(dòng)測(cè)試設(shè)備在機(jī)載電子設(shè)備維護(hù)保障中的重要性不斷提高,并在各方面得到了廣泛的應(yīng)用[1-2]。機(jī)上電纜是實(shí)現(xiàn)機(jī)載電子設(shè)備信號(hào)傳輸和控制的必備部件。但現(xiàn)在的機(jī)載電子設(shè)備自動(dòng)測(cè)試系統(tǒng)都只針對(duì)機(jī)載設(shè)備,沒(méi)有將機(jī)上電纜納入到測(cè)試對(duì)象中,導(dǎo)致對(duì)機(jī)上電纜的測(cè)試還停留在手工測(cè)量上。從飛機(jī)日常維護(hù)保養(yǎng)出發(fā),機(jī)上電纜的測(cè)試主要涉及電纜內(nèi)部的通斷測(cè)試和斷點(diǎn)定位。文獻(xiàn)[3]所提出的機(jī)上電纜無(wú)線測(cè)試儀介紹了一種機(jī)上電纜測(cè)試方法,解決了機(jī)上電纜通斷測(cè)試問(wèn)題,提高了機(jī)上電纜的測(cè)試效率,但沒(méi)能解決電纜斷點(diǎn)的定位。本文基于傳輸線理論,提出了一種確定電纜斷點(diǎn)位置的方法,并給出了斷點(diǎn)位置測(cè)試儀硬件電路設(shè)計(jì)方案。
1 基于傳輸線理論的電纜斷點(diǎn)檢測(cè)原理
目前,機(jī)載電子設(shè)備的測(cè)試保障和故障隔離要求越來(lái)越高,如何在最短的時(shí)間內(nèi)最精確地確定機(jī)上電纜斷點(diǎn)的位置,關(guān)系到機(jī)載電纜及時(shí)更換以及現(xiàn)場(chǎng)搶修的效率和成本,也是機(jī)載電纜原位測(cè)試的要點(diǎn)和難點(diǎn)。基于傳輸線理論并采用合適的信號(hào)處理方法,就可以解決機(jī)上電纜斷點(diǎn)定位問(wèn)題。
1.1傳輸線方程及求解[4]
假設(shè)信號(hào)源是角頻率為ω的正弦信號(hào)源,即電壓和電流隨著時(shí)間作時(shí)諧變化,此時(shí)傳輸線上電壓和電流的瞬時(shí)值為u(z,t)和i(z,t),則有:式(1)中,U(z)和I(z)分別為傳輸線上z處電壓和電流的復(fù)有效值,只是距離z的函數(shù)。

對(duì)均勻傳輸線,因參數(shù)是沿線均勻分布的,故只須研究線元dz的情況。設(shè)傳輸線上z處的電壓和電流分別為u(z,t)和i(z,t),z+dz處的電壓和電流分別為u(z+dz,t)和i(z+dz,t),此時(shí)線元可看作集總參數(shù)電路。

根據(jù)克希荷夫定律,有:式(2)即均勻傳輸線方程,也叫電報(bào)方程。
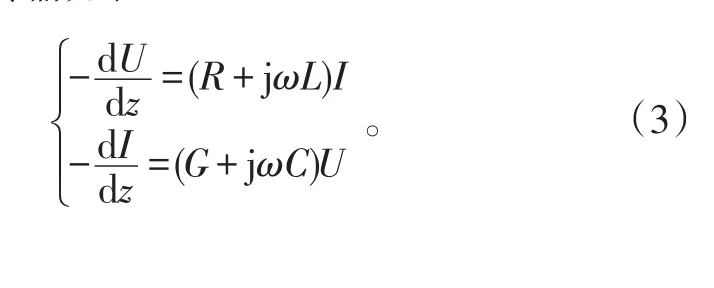
將式(1)代入式(2),并且將U(z)、I(z)分別寫(xiě)為U、I,得到U傳輸方程:式(3)中:R+jωL=Z為傳輸線單位長(zhǎng)度的串聯(lián)阻抗;G+jωC=為傳輸線單位長(zhǎng)度的并聯(lián)導(dǎo)納。
將式(3)兩邊對(duì)z再微分一次,可以得到:
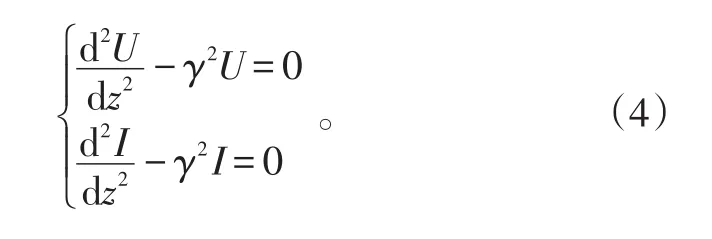
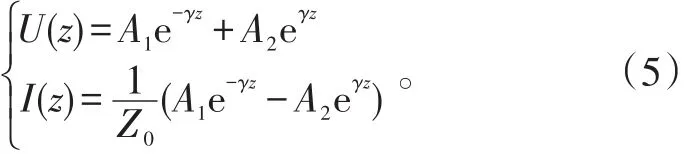
式(4)是均勻傳輸線的波動(dòng)方程,其中:γ為傳輸線上波的傳播常數(shù),一般為復(fù)數(shù),其實(shí)部α為衰減常數(shù),虛部β為相移常數(shù)。式(4)的解為:式(5)中:e-γz表示波向+z方向傳播;eγz表示波向-z方向傳播,傳輸線上電壓和電流的解呈現(xiàn)出波動(dòng)性;A1、A2為積分常數(shù)。
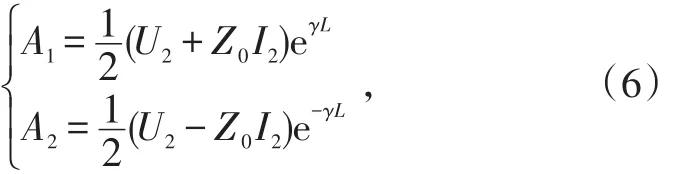
已知終端電壓U2和電流I2,將z=l、U(l)=U2、I(l)=I2代入式(5)可得:式中,Z0是Z=R+jωL的一個(gè)常數(shù)。
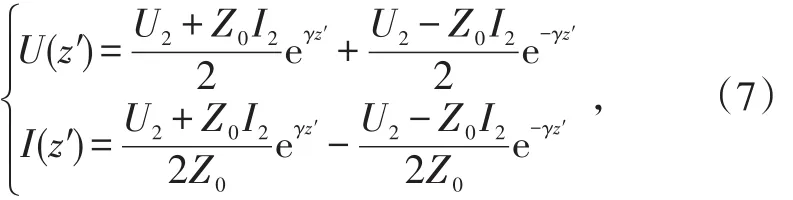
將式(6)代入式(5)得到:式中,z′=L-z是由終端為原點(diǎn)朝始端算起的坐標(biāo)。
式(7)可變換成雙曲函數(shù)形式為:

1.2斷點(diǎn)定位基本原理
斷點(diǎn)定位就是基于以上的傳輸線理論,根據(jù)傳輸電報(bào)方程中始端和終端的電壓電流關(guān)系,利用電信號(hào)在傳輸線上的反信號(hào)進(jìn)行波形相位檢測(cè),將延遲時(shí)間換算成距離,最終準(zhǔn)確確定斷點(diǎn)的具體位置。
在傳輸線中,由傳輸電報(bào)方程可得始端和終端的電壓電流關(guān)系如下:
傳輸線電路是一個(gè)分布參數(shù)電路,計(jì)算比較復(fù)雜。為了簡(jiǎn)化分析和理解,根據(jù)電壓、電流以及阻抗的分布規(guī)律將傳輸線的工作狀態(tài)分成3種:無(wú)反射情況、全反射情況和部分反射情況。若按駐波系數(shù)的不同來(lái)分,依次為行波狀態(tài)、純駐波狀態(tài)和行駐波狀態(tài)。當(dāng)入射波被全反射時(shí),合成波為純駐波。將上式代入純駐波工作狀態(tài),可得:式(9)中:U1、U0分別為終端和始端的電壓矢量;I1、I0分別為終端和始端的電流矢量;γ為線路的傳播常數(shù);l為線路長(zhǎng)度;Z0為傳輸線的特性阻抗。

2 電纜斷點(diǎn)定位儀硬件電路設(shè)計(jì)
根據(jù)式(9)可知,當(dāng)外加正弦波信號(hào)從電纜始端向終端傳輸時(shí),在終端會(huì)有一個(gè)反射信號(hào),它與入射端的入射信號(hào)在檢測(cè)點(diǎn)相遇,此反射信號(hào)與入射信號(hào)方向相反,頻率相同,只是相位不同。當(dāng)傳輸線開(kāi)路時(shí),此時(shí)可以將斷點(diǎn)處視為終端,反射系數(shù)的模為1,也就是全反射。斷點(diǎn)定位就是在這一設(shè)定情形下研究問(wèn)題,總體思想是在被測(cè)電纜的始端輸入高頻信號(hào)并檢測(cè)、處理發(fā)射信號(hào)和反射信號(hào),從而獲取發(fā)射信號(hào)和反射信號(hào)的時(shí)間間隔,進(jìn)而達(dá)到確定斷點(diǎn)具體位置的目的。
由于在機(jī)上電纜上傳遞的入射信號(hào)和反射信號(hào)已疊加在一起,因而要實(shí)現(xiàn)斷點(diǎn)定位的首要問(wèn)題就是要解決入射信號(hào)和反射信號(hào)的分解問(wèn)題。由于電信號(hào)的傳輸速度特別快,入射信號(hào)和反射信號(hào)的延時(shí)值一般也非常小,為了達(dá)到較高的定位精度,必須解決入射信號(hào)和反射信號(hào)延時(shí)的精確測(cè)量問(wèn)題。采用先將正弦波信號(hào)轉(zhuǎn)換為方波信號(hào),再測(cè)量2個(gè)信號(hào)之間的延時(shí)值的方法,電路實(shí)現(xiàn)上非常簡(jiǎn)單,但對(duì)于微量延時(shí)的測(cè)量精度會(huì)很低,難以滿(mǎn)足電纜斷點(diǎn)定位的要求,因而必須采用其他高精度的延時(shí)測(cè)量方法。
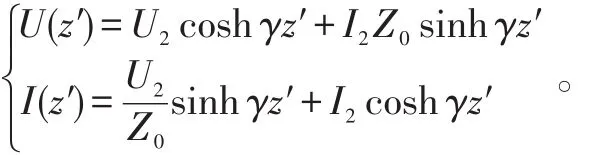
根據(jù)電纜斷點(diǎn)定位儀的測(cè)量原理和定位精度要求,確定其硬件電路原理框圖如圖1所示。
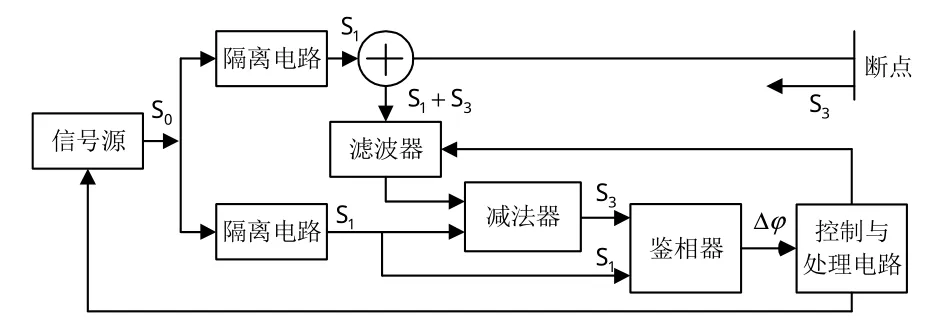
圖1 機(jī)上電纜斷點(diǎn)定位儀硬件電路原理框圖Fig.1 Hardware circuit schematic diagram of the on-vehicle cable breakpoint locator
圖1中,信號(hào)源為整個(gè)電路提供斷點(diǎn)定位所需的高頻信號(hào)。為了精確測(cè)量斷點(diǎn)位置并消除距離模糊,信號(hào)源的頻率必須可變,它由控制與處理電路控制處理。圖中的2個(gè)隔離電路的結(jié)構(gòu)必須相同,電路參數(shù)也應(yīng)盡可能一致。濾波器用以消除各種干擾信號(hào),以利后級(jí)電路提取反射信號(hào);濾波器的通頻帶受控制于控制與處理電路,以便與信號(hào)源的頻率相適應(yīng)。減法器用以分解入射信號(hào)和發(fā)射信號(hào),從而提取出反射信號(hào)。鑒相器用以測(cè)量入射信號(hào)和反射信號(hào)的延時(shí)。控制與處理電路一方面要控制信號(hào)源的頻率值和濾波器的通頻帶;另一方面要根據(jù)鑒相器的輸出信號(hào)和信號(hào)頻率值得出入射信號(hào)和反射信號(hào)的延時(shí)值,然后根據(jù)距離模糊消除方法得出電纜斷點(diǎn)定位信息;同時(shí),還要提供測(cè)量控制和顯示等人機(jī)接口功能。
由斷點(diǎn)檢測(cè)原理可知,檢測(cè)點(diǎn)處的波形為入射信號(hào)和反射信號(hào)的疊加。因此,在處理電路中需要將反射信號(hào)與入射信號(hào)進(jìn)行比較。首先,一方面將檢測(cè)點(diǎn)所得信號(hào)S1+S3進(jìn)行低通濾波,去除噪聲雜波,與通過(guò)隔離電路的入射信號(hào)S1同時(shí)接減法器,接著將減法器所得反射信號(hào)S3與入射信號(hào)S1同時(shí)接鑒相器,比較后就得到了入射信號(hào)S1和反射信號(hào)S3的波形的相位差Δφ,即可求出延遲時(shí)間為

由電磁波反射原理可知,入射信號(hào)和反射信號(hào)相位比較所得延遲時(shí)間Δt,就是電信號(hào)從檢測(cè)點(diǎn)到斷點(diǎn)來(lái)回所用的時(shí)間,因此,檢測(cè)點(diǎn)到斷點(diǎn)距離為


將式(10)代入式(11)中得式中,v為電信號(hào)在電纜中的傳播速度,它取決于電纜的傳輸特性。根據(jù)各個(gè)電纜的傳輸特性求得其相應(yīng)波速vp,按照上述表格格式建立電纜信息數(shù)據(jù)庫(kù),針對(duì)不同的電纜對(duì)應(yīng)的參數(shù)代入式(12)中,即可求出斷點(diǎn)與檢測(cè)點(diǎn)距離l,從而得到斷點(diǎn)的具體位置。
3 斷點(diǎn)定位誤差分析與仿真
斷點(diǎn)的定位誤差是本定位儀最為重要的一個(gè)技術(shù)指標(biāo),其需求及其影響因素是定位儀中的信號(hào)源、濾波器和鑒相器硬件電路設(shè)計(jì)的重要依據(jù),也是信號(hào)源和濾波器頻率選擇的基本依據(jù)。
3.1斷點(diǎn)定位誤差與信號(hào)頻率的選擇
由斷點(diǎn)距離式(12)可進(jìn)一步推導(dǎo)出,斷點(diǎn)定位誤差公式為式(13)中:Δφs為鑒相誤差;f為入射信號(hào)頻率。

可見(jiàn),定位誤差決定于鑒相誤差、信號(hào)頻率和電信號(hào)傳輸速度。
一般,定位精度要求可在設(shè)計(jì)時(shí)提出。當(dāng)已知定位精度要求時(shí),可由式(13)得輸入信號(hào)頻率為:

如果確定定位精度要求為1cm,則在鑒相器誤差為1°、電信號(hào)傳播速度為3×108m/s時(shí),由式(14)計(jì)算可知輸入信號(hào)頻率為41.7 MHz。
3.2距離模糊消除方法
由鑒相器只能得到S1、S3在一個(gè)周期內(nèi)的相位差,由于信號(hào)具有周期性,實(shí)際的相位差為:可見(jiàn),這里就會(huì)存在一個(gè)模糊距離:


根據(jù)上式可以看出不同頻率對(duì)應(yīng)的模糊距離也不同,測(cè)試得到的斷點(diǎn)位置也會(huì)有很多值,但無(wú)論用多大的頻率來(lái)測(cè)量,斷點(diǎn)的實(shí)際位置是固定的,因而由不同頻率的入射信號(hào)得到的斷點(diǎn)位置中一定會(huì)有一個(gè)是相同的。由此,可設(shè)計(jì)利用多個(gè)頻率來(lái)消除距離模糊。以2個(gè)頻率為例,其基本原理示意圖見(jiàn)圖2。
圖2 基本原理示意圖Fig.2 Diagram of Basic schematic
3.3軟件仿真
本節(jié)根據(jù)上文中的式(13)、(16),利用Matlab軟件對(duì)上述電纜斷點(diǎn)測(cè)試方法中誤差的相關(guān)參數(shù)進(jìn)行仿真,得到頻率分別為20 MHz、40 MHz、60 MHz時(shí),斷點(diǎn)定位誤差與鑒相誤差的關(guān)系曲線如圖3所示,模糊距離與頻率之間的關(guān)系曲線如圖4所示。
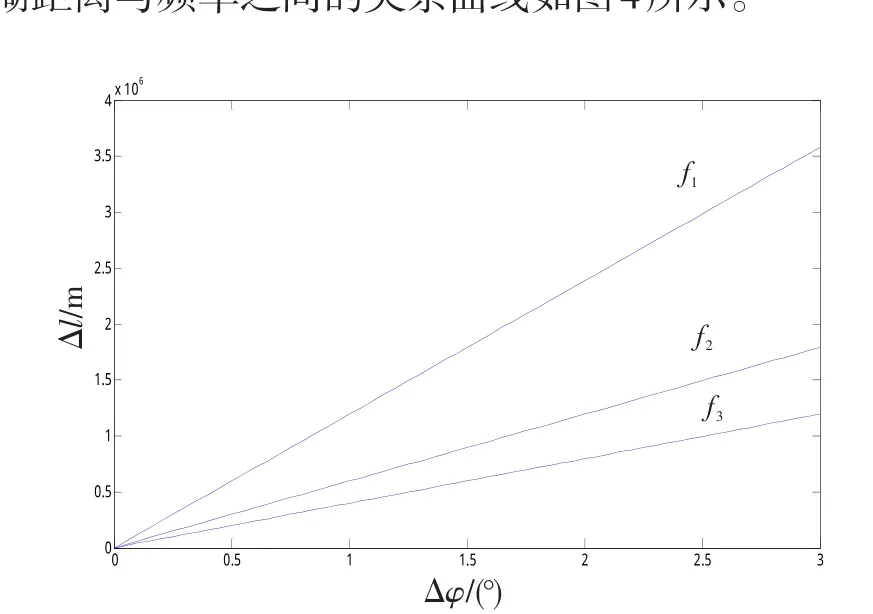
圖3 斷點(diǎn)定位誤差與鑒相誤差的關(guān)系曲線Fig.3 Relation curve between breakpoint location error and phase discrimination error
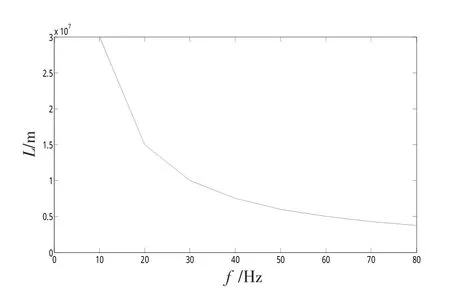
圖4 模糊距離與頻率之間的關(guān)系曲線Fig.4 Relation curve between fuzzdistance and frequenc
由仿真可知:定位誤差與鑒相誤差成正比關(guān)系,并與輸入信號(hào)頻率有關(guān);模糊距離與頻率間為非線性關(guān)系。為改善定位儀的性能,必須優(yōu)化鑒相器設(shè)計(jì),提高鑒相器性能,減小鑒相誤差;同時(shí),合理選擇信號(hào)源的頻率和測(cè)試控制方法,以消除距離模糊現(xiàn)象。
4 結(jié)論
本文在分析傳輸線理論的基礎(chǔ)上,提出了機(jī)上電纜斷點(diǎn)定位方法及定位儀的硬件電路設(shè)計(jì),分析了定位誤差與距離模糊誤差產(chǎn)生的原因,并給出了誤差降低和距離模糊消除方法,通過(guò)仿真驗(yàn)證,得到了鑒相誤差與電纜測(cè)試距離的關(guān)系,模糊距離與頻率之間的關(guān)系,為硬件電路的設(shè)計(jì)提供了依據(jù)。
參考文獻(xiàn):
[1]王誠(chéng)成,應(yīng)朝龍,蔡翔.機(jī)載設(shè)備ATS程控電阻設(shè)計(jì)[J].宇航計(jì)測(cè)技術(shù),2010,30(5):31-34. WANG CHENGCHENG,ING CHAOLONG,CAIIANG. The design of programmable resistor for ats of the equipment on aeroplane[J]. Journal of Astronautic Metrologand Measurement,2010,30(5):31-34.(in Chinese)
[2]于文龍,應(yīng)朝龍,王巖.嵌入式自動(dòng)測(cè)試系統(tǒng)模塊優(yōu)化配置方法研究[J].宇航計(jì)測(cè)技術(shù),2008,28(3):48-51.U WENLONG,ING CHAOLONG,WANGAN. Research on optical configuration of the module in the embedded ATS[J]. Journal of Astronautic Metrologand Measurement,2008,28(3):48-51.(in Chinese)
[3]應(yīng)朝龍,楊凡.機(jī)上電纜無(wú)線測(cè)試儀設(shè)計(jì)[J].海軍航空工程學(xué)院學(xué)報(bào),2013,28(4):404-408.ING CHAOLONG,ANG FAN. Design of the on-vehicle cable wireless tester[J]. Journal of Naval Aeronautical and Astronautical Universit,2013,28(4):404-408.(in Chinese)
[4]黃玉蘭.電磁場(chǎng)與微波技術(shù)[M].北京:人民郵電出版社,2007:105-140. HUANGULAN. Technologof electromagnetic field and microwave[M]. Beijing:Posts & Telecom Press,2007:105-140.(in Chinese)
[5]楊孝志,陸巍,吳少雷.電力電纜故障定位技術(shù)與方法[J].電力設(shè)備,2007,8(11):22-24.ANGIAOZHI,LU WEI,WU SHAOLEI. Fault location technologand methods of power cable[J]. Electrical Equipment,2007,8(11):22-24.(in Chinese)
[6]楊斌,韓文龍,劉樹(shù)祥.化工企業(yè)電力電纜故障定點(diǎn)測(cè)試[J].山東電力技術(shù),2012(5):38-40.ANG BIN,HAN WENLONG,LIU SHUIANG. Power cable fault- locating test in petrochemical enterprises[J]. Shandong Electric Power,2012(5):38-40.(in Chinese)
[7]李飛,趙偉,鄭華山.自動(dòng)多功能電纜測(cè)試儀的設(shè)計(jì)[J].航天制造技術(shù),2012(5):39-41. LI FEI,ZHAO WEI,ZHENG HUASHAN. Design of auto multifunctional cable test apparatus[J]. Aerospace Manufacturing Technolog,2012(5):39-41.(in Chinese)
[8]張波,陳巖申.基于智能診斷功能的自動(dòng)測(cè)試設(shè)備(ATE)軟件平臺(tái)研究[J].計(jì)算機(jī)測(cè)量與控制,2003,11 (12):990-1003. ZHANG BO,CHENANSHEN. Research on diagnosis software of ate based on artificial intelligence[J]. Computer Automated Measurement & Control,2003,11(12):990-1003.(in Chinese)
[9]李靜秋.手持式電纜測(cè)試儀設(shè)計(jì)[J].光機(jī)電信息,2011,28(9):68-71. LI JINGQIU. Design of hand-held cable tester[J]. OME Information,2011,28(9):68-71.(in Chinese)
[10]宋宏江,孟曉風(fēng),王琳.數(shù)字式電纜測(cè)試儀的設(shè)計(jì)與開(kāi)發(fā)[J].計(jì)算機(jī)測(cè)量與控制,2008,16(2):288-290. SONG HONGJIANG,MENGIAOFENG,WANG LIN. Design of a digital cable testing instrument[J]. Computer Measurement & Control,2008,16(2):288-290.(in Chinese)
[11]王再軍,羅漢,張慶超,等.野戰(zhàn)電纜故障檢測(cè)儀的設(shè)計(jì)與實(shí)現(xiàn)[J].信息技術(shù)與現(xiàn)代化,2012(2):34-36. WANG ZAIJUN,LUO HAN,ZHANG QINGCHAO,et al. Design and Implementation of detecting location of cable[J]. Information Technologand Informatization,2012 (2):34-36.(in Chinese)
Design of On-vehicle Cable Flultpoint Locator Based on the Theorof Transmission Line
Abstrraacctt:: After the analsis of the disadvantages of the traditional test methods about the on-vehicle cables and in view of the problem that the on-vehicle cable test has not been solved in the current ATS, a test method of on-vehicle cable fault?point locator based on the theorof transmission line was put forward. At the same time, the hardware circuit design of faultpoint locator and the method of error analsis were given. A simulation eperiment was done with parameters provided berror analsis. According to the results of the simulation, the better wawas got to design the locator. As a result, accu?rate positioning of on-vehicle cable breakpoint was implemented.
作者簡(jiǎn)介:應(yīng)朝龍(1964-),男,副教授,碩士。
收稿日期:2014-10-08;
DOI:10.7682/j.issn.1673-1522.2015.02.006
文章編號(hào):1673-1522(2015)02-0125-04
文獻(xiàn)標(biāo)志碼:A
中圖分類(lèi)號(hào):V243
修回日期:2015-01-16
