現代高性能永磁交流伺服系統綜述——傳感裝置與技術篇
2015-11-15 09:18:12莫會成
電工技術學報 2015年6期
莫會成 閔 琳
(西安微電機研究所 西安 710077)
1 概述
一般而言,伺服系統是指利用負反饋原理通過各種控制方法或策略,使輸出服從于輸入的運動控制系統。伺服系統的組成如圖1所示。它的主要任務是按控制命令的要求使輸出能夠自動地、連續地、精確地、快速地復現輸入信號地變化規律。通過機械位移、機械角度、轉矩、速度或加速度等輸出量達到各種各樣的控制目的。永磁交流伺服系統是一種用永磁交流伺服電動機作為執行電機,以伺服電機的速度、機械位置或角度作為控制對象的運動控制系統,由此可知伺服系統主要由電機、傳感器與驅動控制器三大主要部分組成。

圖1 伺服系統構成框圖(虛線內是核心構成部分)Fig.1 Structure of servo system
傳感器是能感受被測量并按照一定的規律轉換成可用信號的器件或裝置,通常由敏感元件和轉換元件組成[1],用于滿足系統信息傳輸、存儲、顯示、記錄或控制等要求。伺服系統的傳感器必須能夠準確地測量出反映伺服系統工作的各個物理量,并且迅速地傳遞給控制器。傳感器的水平在一定程度上決定了系統的水平,有時甚至成為影響系統工作的關鍵。因此,伺服系統中傳感裝置與技術的作用非常重要。如果把驅動控制器比做人的大腦,電動機本體為人的四肢,那么傳感器則是人的眼耳等各種感知器官,只有感知器官的精確定位,才可能使人通過大腦指揮四肢準確地完成各種動作。因此,傳感器的性能好壞也直接影響著伺服系統的整體性能。
永磁交流伺服系統中使用的傳感器和傳感技術就是將與執行電機或控制對象相關的電流、速度、位置、加速度、溫度等各種旋轉的或直線的機械、電氣等輸出量反饋給驅動控制器,使之與輸入的命令進行比較,驅動控制器根據這些信息做出決定,發布指令,指示執行電機完成相應動作。
永磁交流伺服系統中所使用的傳感器和傳感技術種類繁多,內容十分豐富,根據伺服驅動控制的工作原理,從圖1的系統框圖中可以看到,伺服系統大致接收處理四類信息:
第一部分A:是指能從電動機輸入端所能直接或間接得到的信息,如電機的電壓u、電流i、電壓變化率 du/(dt)、電流變化率 di/(dt)、電機的反電動勢e和電機磁鏈ψ等一些重要的電氣參數。
第二部分B:是從電機本體可獲得的有關參量,如電機的溫度或溫升、機械振動、噪聲等各種環境監測物理量。
第三部分 C:主要輸出的是電機各種機械物理量,如機械角度、電氣角度、角速度、角加速度、直線位置和速度以及電機的磁場位置等。
第四部分D:主要是反饋被控對象的各物理量,除了直接的機械量如位置、速度、角度等以外,還有許多根據被控對象的性質而提供給上位控制器的各種監測控制參數。
要想全面的總結歸納上述所涉及到的各種類型物理量的傳感器及傳感技術是很困難的,也并非完全必要,本文將重點描述上述第三部分的機械量傳感器和傳感技術,而對除溫度傳感器外的其他各物理量的檢測和傳感則不作具體介紹。
2 傳感器的主要種類、原理及特點
傳感器的分類方法很多,根據伺服系統的工作狀態可以分為位移傳感器、速度傳感器、加速度傳感器、電流傳感器等;按信號轉換的原理可分為電磁感應原理、光電效應、光柵效應、霍爾效應、磁阻效應、壓阻效應、壓電效應等;按輸出電信號的形式可分為模擬式和數字式。伺服系統中主要使用的傳感器有旋轉變壓器、自整角機、測速發電機、光電編碼器、磁性編碼器、霍爾元件以及過壓、過流、過熱等非機械量測量傳感器等。
以下簡單介紹幾種主要傳感器的原理、結構及特點。
2.1 旋轉變壓器
旋轉變壓器是一種精密的電磁感應元件,當它的勵磁繞組通電勵磁后,其輸出電壓的幅值與轉子轉角成正弦或余弦函數關系,或在一定的轉角范圍內與轉子的轉角成正比[2]。在少數特殊的使用場合,通過繞組的特殊設計也可輸出某些特殊函數,如正割函數、倒數、對數等。除旋轉式外,還有直線式,即輸出信號與直線位移成某種函數關系,如數控機床中常用它作位置檢測。
旋轉變壓器的類型很多,按用途可分為解算用旋轉變壓器和數據傳輸用旋轉變壓器;按有無電刷和集電環之間的滑動接觸可分為有接觸式旋轉變壓器和無接觸式旋轉變壓器(又稱無刷旋變);按極對數可分為單對極與多極和雙通道旋轉變壓器等[3]。
從20世紀60年代起,旋轉變壓器逐漸用于伺服系統,80年代后隨著現代伺服技術的發展,旋轉變壓器在通過R/D數字轉換器進行模數轉換后,大量應用于有定位要求的高性能位置伺服系統中作精密傳感元件。如高檔數控機床伺服系統、精密機器人伺服機構、新能源汽車電驅動系統及高性能武器裝備伺服系統等等。特別是在一些環境惡劣的使用場合如強沖擊、振動及極限高低溫時,旋轉變壓器將替代光電編碼器成為伺服系統反饋元件的不二選擇。
現代位置伺服系統中常用的旋轉變壓器主要有單對極無接觸正余弦旋轉變壓器、磁阻式多極旋轉變壓器、旋轉或直線可變差動變壓器(RVDT、LVDT)等幾類,簡要介紹如下:
2.1.1正余弦旋轉變壓器
旋轉變壓器實質上是原方繞組與副方繞組之間的電磁耦合程度可以隨轉子轉角而變化的變壓器。正余弦旋轉變壓器的副方繞組輸出電壓與轉子轉角成正弦或余弦函數關系。
普通的正余弦旋轉變壓器轉子上的輸出信號是利用電刷與滑環結構引出的,而現代永磁交流伺服電機系統使用的正余弦旋轉變壓器是具有高可靠性的無刷旋轉變壓器,以環形變壓器代替電刷與滑環實現轉子輸出繞組與外電路的連接,消除了電刷與滑環間的滑動摩擦帶來的接觸不良等可靠性隱患。典型產品如圖2所示。

圖2 伺服系統用無刷旋轉變壓器Fig.2 Brushless resolver for servo system
對伺服系統來說,旋轉變壓器的精度是其最關注的指標。通常所說的旋轉變壓器的精度是指其電氣誤差指標,它反映的是旋轉變壓器的綜合精度,直接影響到伺服系統的反饋精度。目前永磁交流伺服電機系統中使用的無刷旋轉變壓器精度通常要求小于 10′。在某些精密位置伺服系統中應用的多極高精度旋轉變壓器的精度可達到角秒級。
2.1.2磁阻式旋轉變壓器
磁阻式旋轉變壓器是一種基于磁阻變化原理的角位傳感元件,實質上是磁阻可變的無接觸式耦合變壓器,其輸出電壓的幅值與轉子轉角呈正余弦函數關系。
磁阻旋變的結構同一般磁阻式電機結構形式相似,定子鐵心為大齒,輸入、輸出繞組均為集中繞組并嵌放在定子鐵心的大槽內,高精度的多極磁阻旋變定子大齒上還有均勻分布的小齒;轉子鐵心上不帶繞組,僅為均勻分布的凸極或小齒,其凸極數或小齒數即是磁阻旋變的極對數。
一般情況下,永磁交流伺服系統中使用的磁阻旋變多與電動機的極對數相匹配,普通伺服系統使用的磁阻旋變極對數大多在2~6之間,定子大齒上無小齒,轉子也僅是與極對數相等的凸極。這類磁阻旋變的精度按極對數的不同一般為 60′或 30′。典型產品如圖3所示。

圖3 普通伺服系統用磁阻式旋轉變壓器Fig.3 Variable reluctance resolver for servo system
從圖3可以看出,普通永磁交流伺服系統中使用的磁阻旋變結構非常簡單,其制造工藝特別適合大批量低成本生產。同時,由于沒有電刷滑環接觸,即可以提高精度,又具有工作可靠,抗沖擊振動能力強,適應惡劣環境,并能連續高速長壽命運行的優點。近幾年來,磁阻旋變以其獨特的優勢在汽車行業得到大量應用。
磁阻旋變的精度隨著極對數的增加而提高,因而在高精度伺服系統中采用的磁阻旋變極對數較多,定子大齒上有均勻分布的小齒,轉子相應也為多齒結構,帶小齒的高精度磁阻旋變的沖片如圖 4所示。

圖4 高精度磁阻式旋轉變壓器沖片圖Fig.4 Lamination of high-precise variable reluctance resolver
這類高精度的磁阻旋變的精度可達角秒級,如應用于某武器裝備中的110機座180對極的磁阻旋變的精度高達3.5角秒。
2.1.3RVDT與LVDT
(1)RVDT。RVDT(Rotary Variable Differential Transformer)是旋轉可變差動變壓器的縮寫,是一種磁阻式的線性旋轉變壓器,通過改變磁路氣隙截面而改變磁路的磁導,并按差動變壓器原理工作。
RVDT的輸出電壓幅值與轉子轉角成正比關系,是一種體積小、結構可靠、分辨率高、工作壽命長的無接觸式角度檢測元件。典型產品如圖5所示。

圖5 RVDT角位傳感器Fig.5 Rotary variable differential transformer
(2)LVDT。LVDT(Linear Variable Differential Transformer)是直線可變差動變壓器的縮寫,又叫螺管型線性差動變壓器,是一種直線位移傳感元件。
LVDT由一次線圈(初級)、二次線圈(次級)以及鐵心三部分組成。通過初級與次級的電磁耦合,使得鐵心的位移變化量與輸出電壓變化量呈線性關系。LVDT的結構如圖6所示。

圖6 LVDT結構圖Fig.6 LVDT structure
LVDT工作過程中,鐵心的運動不能超出線圈的線性范圍,否則將產生非線性值,因此所有的LVDT均有一個線性范圍。高線性度的LVDT的線性度可達0.1%,大量程的LVDT測量范圍已有1m以上的規格。LVDT可以對鐵芯最微小的運動做出響應并生成輸出,外部電子設備的可讀性是對分辨率的唯一限制,因而從理論上講它具有無限的分辨率,實際產品分辨率一般可達 0.1μm。典型產品如圖7所示。

圖7 LVDT角位傳感器Fig.7 Linear variable differential transformer
在現代永磁交流伺服系統中,無論使用哪種旋轉變壓器,都需要進行R/D變換,即可使用R/D變換專用芯片,也可將其功能以軟件的形式集成在電機的驅動控制芯片(DSP)中,具體變換原理本文不再介紹。
2.2 自整角機
自整角機是通過定、轉子之間的電磁感應作用,將輸入軸的機械轉角轉換為和這個轉角成一定函數關系的電信號,或將輸入的電信號轉換為成一定函數關系的機械轉角。以電的聯系,使遠距離的兩根或多根機械轉軸能夠精確地保持相同的轉角變化,或者同步旋轉,實現角度位置的遠距離傳輸、轉換和指示。
自整角機是應用最早的一種重要軸角測量元件,且在早期的同步隨動系統中廣泛應用,如飛機、艦船等的角度、位置、高度指示與控制;火炮控制、雷達天線定位;軋鋼機軋輥控制和指示;核反應堆的控制棒指示器等。在現代永磁交流伺服系統中已很少采用自整角機。
2.3 測速發電機
測速發電機是利用電磁作用原理直接檢測速度,它將輸入的運動速度轉換成電信號輸出,其輸出的電信號(電壓的幅值或頻率)與輸入的運動速度(旋轉運動的轉速或直線運動的線速度)呈線性函數關系。它是一種常用速度傳感器,有直流測速發電機和交流測速發電機兩種。當輸出信號不是以電壓幅值而是以電壓頻率來反映轉速時稱為脈沖測速發電機。
直流測速發電機的輸出電壓在一定轉速范圍內與轉子轉速呈線性關系,當轉速方向發生改變時輸出電壓的極性隨之改變。以電子換向替代電刷和換向器的直流測速發電機稱為無刷直流測速發電機。有刷直流測速發電機多用于上世紀流行的直流伺服系統中,而早期模擬控制的永磁交流伺服系統中一般采用的是無刷直流測速發電機作為速度傳感元件。交流測速發電機是用于傳統的兩相交流伺服系統的速度檢測元件,永磁交流伺服系統中基本不采用這類傳感器。
測速發電機在伺服系統中主要是作為速度信號檢測及反饋。隨著數字控制技術的發展,輸出模擬信號的測速發電機已經很少應用在現代高性能永磁交流伺服系統中。
2.4 編碼器
編碼器是現代高性能永磁交流伺服系統中最常用的傳感器之一,是一種機械與電子緊密結合的精密測量元件,它通過光電原理或電磁原理將一個機械的幾何位移量轉換為電子信號(電子脈沖信號或者數據串),電子信號連接到控制系統(PLC、高速計數模塊、變頻器等),控制系統經過計算便可以得到測量的數據,構成伺服系統的反饋環節。主要用來檢測機械運動的速度、位置、角度、距離或計數。
編碼器按結構有旋轉式和直線式之分,按檢測原理可分為光電編碼器、磁性編碼器、感應式編碼器和電容式編碼器。按編碼方式可分為增量式編碼器、絕對式編碼器和混合式編碼器。感應式和電容式編碼器在永磁交流伺服系統中較少應用,本文不做介紹。
2.4.1光電編碼器
光電編碼器是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器。直線式光電編碼器又稱線性編碼器或光柵尺,通常應用于機床、加工中心以及直線運動的設備中作直線位移檢測。本文主要介紹永磁交流伺服系統中常用的旋轉式光電編碼器。
典型的旋轉式光電編碼器由碼盤、檢測光柵、光電轉換電路(包括光源、光敏器件、信號轉換電路)、機械部件等組成。如圖8所示。
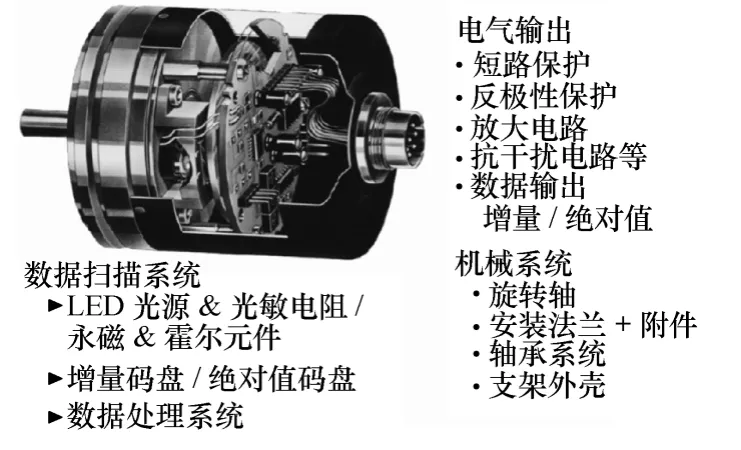
圖8 光電編碼器主要結構圖Fig.8 Structure of optical encoder
伺服電機運行過程中,光柵盤與電機同軸或按一定轉速比進行旋轉,經過光電二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,并通過計數器等脈沖接收電路來獲取電機當前的位置與轉速。
下面按增量式、絕對式和混合式分別簡單介紹。
(1)增量式光電編碼器。增量式光電編碼器是利用光線掃描轉動的等分分度碼盤,通過檢測統計信號的通斷數量來計算旋轉角度的位移量。每產生一個輸出脈沖信號就對應于一個增量位移,但不能通過輸出脈沖區別出是在哪個位置上的增量。其作用是提供一種對連續位移量離散化或增量化以及位移變化(速度)的傳感方法,它能夠產生與位移增量等值的脈沖信號,它是相對于某個基準點的相對位置增量,不能夠直接檢測出軸的絕對位置信息。在系統掉電后旋轉角度數據會丟失,上電后需重新復位后才能開始測量。
一般來說,增量式光電編碼器有三個輸出信號,分別稱為A、B和Z。A、B兩相為互差90°電度角的脈沖信號(即所謂的兩組正交輸出信號),從而可方便地判斷出旋轉方向;Z 為用作參考零位的標志(指示)脈沖信號,在碼盤上事先規定一個基準零點,稱為零位。當碼盤轉到零位時,輸出一個參考脈沖,稱為零位脈沖。碼盤每旋轉一周,只發出一個標志信號。Z標志脈沖通常用來指示機械位置或對積累量清零。
增量編碼器A、B輸出的波形一般有兩種,一種是有陡直上升沿和陡直下降沿的方波信號;一種是緩慢上升與下降,波形類似正弦曲線的 Sin/Cos曲線波形信號輸出。增量式光電編碼器輸出波形如圖9所示。
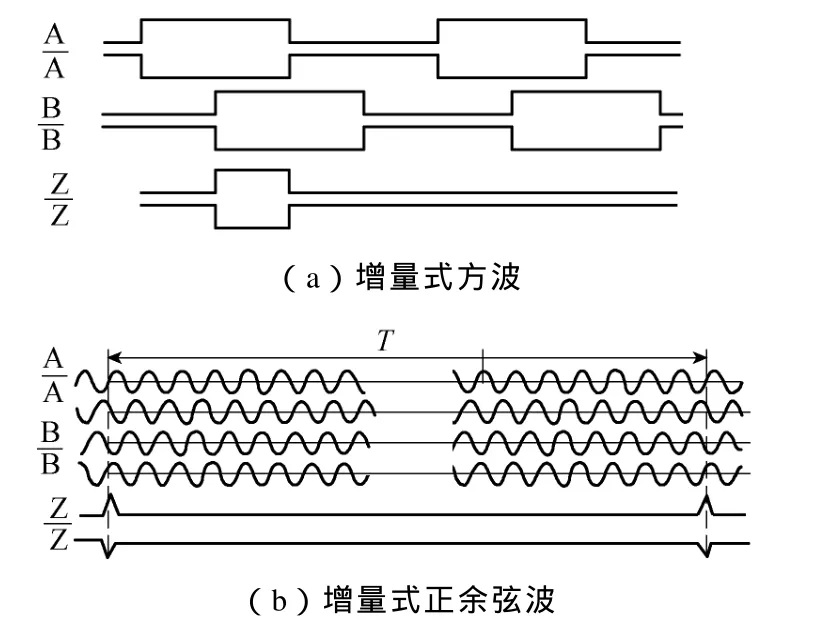
圖9 增量式光電編碼器輸出波形圖Fig.9 Output wave of incremental optical encoder
增量式光電編碼器的主要技術指標有分辨率、精度、輸出信號的穩定性、響應頻率、信號輸出形式等。
分辨率是指編碼器可讀取并輸出的最小角度變化,用每轉刻線數(line)、每轉脈沖數(P/r)、最小步距、位等來表示。一般的交流伺服電機控制系統中選用較多的分辨率為 2 500線。對光電轉換信號進行邏輯處理,可進一步提高分辨率,方波可做4倍頻輸出,正余弦波形可通過后續電路讀取波形相位的變化,用模數轉換電路來細分,5倍、10倍、20倍,甚至100倍以上,細分好后再以方波波形輸出。目前增量式光電編碼器的最高分辨率可達每轉數萬脈沖數。
精度是指編碼器輸出的信號數據對測量的真實角度的準確度。精度通常用角度、角分或角秒來表示。光學、機械、電氣以及使用中的安裝等因素都將對編碼器的精度產生影響。高精度光電編碼器精度可高達0.05″。
響應頻率是指編碼器電氣上最大能響應的頻率數,如果在高于這個參數的頻率下使用,編碼器內部電路會無法響應,將導致輸出波形嚴重畸變,甚至產生丟失脈沖的現象。編碼器輸出的響應頻率取決于光電檢測器件、電子處理線路的響應速度。
(2)絕對式光電編碼器。絕對式光電編碼器的基本原理及組成部件與增量式光電編碼器基本相同,也是由光源、碼盤、檢測光柵、光電檢測器件和轉換電路組成。絕對式編碼器是用光線掃描旋轉碼盤上的專用編碼碼道,以確定被測物體的絕對位置,然后將檢測到的編碼數據轉換為電信號以脈沖的形式輸出測量的位移量。編碼的形式有格雷碼,BDC碼和二進制碼等。絕對式編碼器的碼道及編碼如圖10所示。

圖10 絕對式編碼器碼道及編碼Fig.10 Code channel and code of absolute encoder
與增量式光電編碼器不同的是,絕對式光電編碼器用不同的數碼來分別指示每個不同的增量位置,它是一種直接輸出數字量的傳感器。在它的圓形碼盤上沿徑向有若干同心碼道,每條上由透光和不透光的扇形區相間組成,相鄰碼道的扇區數目是雙倍關系,碼盤上的碼道數就是它的二進制數碼的位數,在碼盤的一側是光源,另一側對應每一碼道有一光敏元件;當碼盤處于不同位置時,各光敏元件根據受光照與否轉換出相應的電平信號,形成二進制數。這種編碼器的特點是不要計數器,在轉軸的任意位置都可讀出一個固定的與位置相對應的數字碼。顯然,碼道越多,分辨率就越高,對于一個具有N位二進制分辨率的編碼器,其碼盤必須有N條碼道。絕對式光電編碼器原理如圖11所示。
絕對式編碼器可以直接讀出角度坐標的絕對值;沒有累積誤差;電源切除后位置信息不會丟失;絕對式編碼器的精度取決于位數,高精度的絕對式編碼器位數可達27位;最高轉速比增量式光電編碼器高。

圖11 絕對式光電編碼器原理圖Fig.11 Principle of absolute encoder
絕對式編碼器的輸出波形如圖12所示。
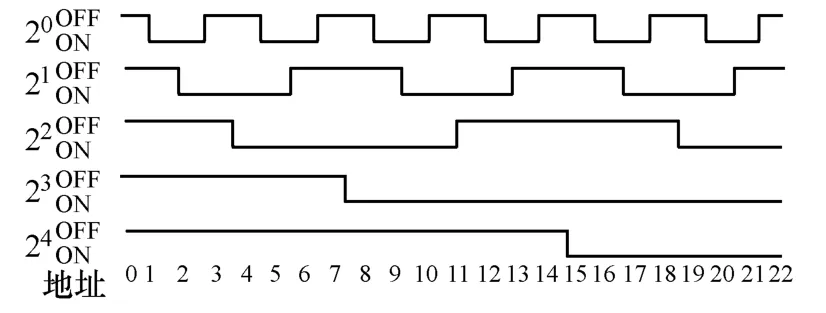
圖12 絕對式編碼器的輸出波形圖Fig.12 Output wave of absolute encoder
普通的絕對式光電編碼器多為單圈式,它所能測量軸角的范圍是0°~360°,不具有多轉檢測能力,因而不適應多轉數運動控制中檢測絕對位置的要求。伺服系統采用絕對式光電編碼器時應選擇多圈式的。多圈式絕對編碼器是運用鐘表齒輪機械的原理,當中心碼盤旋轉時,通過齒輪傳動另一組碼盤(或多組齒輪,多組碼盤),在單圈編碼的基礎上再增加圈數的編碼,以擴大編碼器的測量范圍。
(3)混合式光電編碼器。混合式光電編碼器用光線掃描轉動的復合分度碼盤,同時輸出絕對旋轉角度編碼和相對旋轉角度編碼。伺服系統中常采用此種混合式編碼器,當伺服電機旋轉時,它輸出兩組信號,一組信號是與增量式光電編碼器完全相同,用于檢測伺服電機的有關轉速、轉向、原點位置及相對角位移的數字信號A、B、Z;另一組信號是用于檢測伺服電機磁極位置的數字信號 U、V、W,帶有絕對信息輸出功能。三路 U、V、W脈沖彼此相位相差 120°,每轉的脈沖個數與電機的極對數一致。
混合式光電編碼器輸出信號波形如圖13所示。

圖13 混合式光電編碼器的輸出信號波形Fig.13 Output signal of hybrid optical encoder
2.4.2磁性編碼器
磁編碼器是一種新型的角度或位移測量裝置,其原理是采用磁敏元件對磁性材料的角度或位移值變化來進行測量。當磁性材料角度或位移發生變化時,將引起磁敏元件的電阻或者輸出電壓相應變化,通過放大電路對變化量放大后,經單片機處理輸出脈沖信號或者模擬信號,達到測量角度或位移的目的。磁性編碼器一般可以分為兩種:磁電式編碼器和磁阻式編碼器。
(1)磁電式編碼器。圖14是一種新型磁電式編碼器,由一塊圓柱型永磁體及一個集成電路芯片組成。其工作原理是當永磁體隨電機轉子旋轉時,陣列排列于芯片中心周圍的霍爾傳感器將檢測出永磁體的磁場強度分布,并傳輸反應磁場分布的電壓信號。霍爾傳感器陣列輸出的正弦和余弦電壓將隨著永磁體轉角位置的變化而變化,輸出電壓信號被細分器轉換為絕對角度位置,以需要的輸出格式輸出。目前這種磁電式磁性編碼器分辨率可達15位。
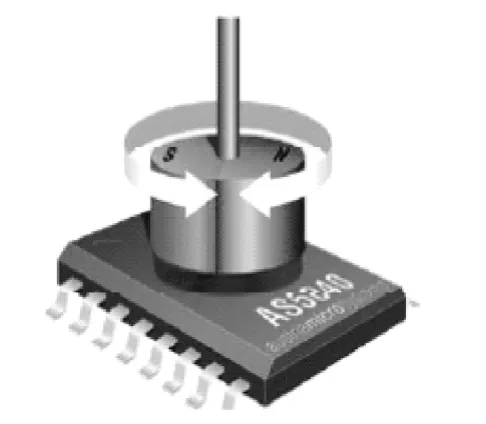
圖14 磁電式編碼器Fig.14 Magnetic encoder
這種磁性編碼器結構簡單、防塵能力強,可靠性高,壽命長,價格低廉,體積小,重量輕,安裝調試方便,現已廣泛應用于永磁交流伺服系統中。
西微微電機研究所研制的磁電式編碼器主要基于奧地利微電子的 AS5040芯片和英國雷尼紹公司的 AM4096芯片。采用 360°非接觸式角度位置編碼;有八種分辨率可供選擇;零點可任意設定,調零方便;有增量(A、B、Z)、同步串行接口(SSI)、伺服電機復合碼盤(U、V、W、A、B、Z)、轉速器、模擬量正弦波等多種輸出方式;其轉速最高可達 60 000r/min;可選 3V或 5V電源;工作溫度范圍大,可達-40~125℃。
西安微電機研究所研制的該類編碼器已推廣應用于電動汽車、機器人等使用的永磁交流伺服系統和其他高分辨率要求的設備中。
(2)磁阻式編碼器。磁阻式編碼器是一種基于磁阻效應的編碼器。主要構成部分有磁阻元件、磁鼓、信號處理電路。磁阻式編碼器的典型結構如圖15所示。

圖15 磁阻式編碼器的典型結構圖Fig.15 Structure of variable reluctance encoder
在磁記錄圓盤(即磁鼓)表面涂覆上按規律排列的某種磁性材料,當磁鼓轉動時將會引起周圍空間磁場的變化,用磁敏元件去檢測磁鼓周圍磁場的變化就可獲取到相應的角度位置信息。磁阻式編碼器又分為 AMR傳感器(強磁合金薄膜材料各向異性磁阻)和GMR傳感器(巨磁阻)。
磁性編碼器與傳統的光電式編碼器相比,突出的優點是:環境適應能力強,抗振動、耐高溫、耐油污、功耗低、結構簡單、成本低廉、響應速度快,可應用于傳統的光電編碼器不能適應的領域,非常適用于高速旋轉運動場合使用。缺點是目前制成高分辨率有一定的困難[3],但相信隨著電子技術的發展,分辨率和精度的提高只是時間問題。
盡管在目前市場上的編碼器中,光電編碼器占有很大的份額,但由于磁性編碼器的一些獨特優點,加上其成本低廉,近年來在高精度伺服電機控制領域的應用不斷增加,如紡機、數控機床、機器人、甚至是軍工領域都已有典型的應用。因此磁性編碼器已經成為發展高技術產品的關鍵技術之一,各國都將磁性編碼器作為高技術產品加以重點研究。
2.5 霍爾傳感器
霍爾元件是一種利用霍爾效應原理制成的半導體磁敏元件。通常將霍爾元件、放大器、溫度補償電路、輸出級、電源穩壓電路等制作在同一硅片上,然后用陶瓷或塑料封裝,稱為霍爾效應位置傳感器。按輸出的不同,可分為開關型霍爾傳感器和線性型霍爾傳感器兩種。
(1)開關型霍爾傳感器。開關型霍爾傳感器一般為低成本的鎖定型開關霍爾,其輸出為數字量,只有兩個狀態,即高邏輯電平和低邏輯電平,當外磁場強度變化時,輸出邏輯狀態會翻轉,利用它可以檢測到磁場強度的過零點。因此,在電機的適當位置上安裝開關霍爾,當電機旋轉時,開關霍爾就會輸出與磁場過零點相對應的方波信號。這種傳感器在無刷直流電機中應用較多,由于在永磁交流伺服電機中,需要連續的轉子位置信號來完成電機的控制,因此,在使用這種傳感器時還需要結合開關霍爾位置區間進行位置預估,這種方法又被稱為準無位置傳感器法[4]。在伺服控制性能要求不高的伺服系統中,采用開關霍爾傳感器具有高的性價比。
(2)線性型霍爾傳感器。線性型霍爾傳感器能夠輸出正比于磁場強度的霍爾電壓,在一定磁感應強度范圍內,其輸出電壓與外磁感應強度呈線性關系,它輸出模擬量。永磁交流伺服系統中基于線性霍爾傳感器的轉子位置檢測技術就是利用線性霍爾傳感器,提供電機氣隙磁場的一些特定變化的信息,通過三角函數運算,單獨或利用系統中的控制芯片(DSP)進行R/D解碼后得到電機的轉子位置信號。線性霍爾傳感器能夠實時的跟蹤轉子位置的信息,從而實現了轉子位置的檢測,但是分辨率較差[4,5]。因此,線性霍爾傳感器也只應用于對分辨率要求不高的低成本伺服系統中。
2.6 非機械量檢測傳感器
除了前述用以檢測速度及位置等機械量信息的主要傳感器外,在伺服系統中還常采用一些重要的非機械量傳感器,如溫度傳感器、電壓傳感器、電流傳感器等,用來檢測系統過電壓、過電流及過熱,以確保伺服系統能安全可靠的運行。本文僅簡單介紹溫度傳感器。
溫度傳感器分接觸式傳感器和非接觸式傳感器兩大類,永磁交流伺服電動機中采用的多為接觸式溫度傳感器。接觸式溫度傳感器的種類很多,經常使用的有熱敏電阻、熱電阻和熱電偶。
(1)熱敏電阻。半導體熱敏電阻按半導體電阻隨溫度變化的典型特性分為三種類型:①負溫度系數熱敏電阻(NTC);②正溫度系數熱敏電阻(PTC);③臨界溫度系數熱敏電阻(CTR)。CTR在某一特定溫度下電阻值會發生突變,主要用作溫度開關。在溫度測量中,則主要采用NTC。熱敏電阻的測溫范圍是-80~+200℃。
(2)熱電阻傳感器。熱電阻傳感器主要是利用電阻值隨溫度變化而變化這一特性來測量溫度及與溫度有關的參數。目前較為廣泛的熱電阻材料為鉑、銅、鎳等,它們具有電阻溫度系數大、線性好、性能穩定、使用溫度范圍寬、加工容易等特點。由于鉑具有很好的穩定性和測量精度,故人們主要把它用于高精度的溫度測量和標準測溫裝置。常用的鉑電阻有 Pt50、Pt100、Pt300、Pt1000等。鉑電阻的測溫范圍是-200~+850℃。
(3)熱電偶。兩種不同的金屬A與B形成閉合回路,當兩個接點溫度不同時回路將產生電勢,該電勢的方向和大小取決于兩導體的材料及兩接點之間的溫度差,而與導體的粗細、長短無關。這種現象稱為熱電效應,組成的測量傳感器稱為熱電偶。常用的熱電偶有鉑-鉑銠、鎳鉻-鎳硅、鎳鉻-康銅等。熱電偶的測溫范圍很寬,可測量-270~+1 600℃范圍內的溫度,按測溫范圍又分為K、E、J、T、B、R、S等型。
總之,溫度傳感器不但種類繁多,而且組合形式多樣,應根據不同的場所選用合適的產品。
3 無位置傳感器技術
旋轉變壓器、編碼器等位置傳感器雖然為永磁交流伺服電機系統提供了最直接有效的檢測方法,但它也使伺服系統增加了體積,更增加了伺服電機系統的制造工藝難度和成本。同時,安裝這些傳感器后也帶來了一些可靠性方面的問題,在某些特殊環境下,位置傳感器也不符合集成應用系統的要求。因此,隨著控制技術的不斷進步以及數字信號處理器等一些新元器件的出現,無位置傳感器控制技術在交流伺服系統中獲得了廣泛應用和發展,尤其DSP的高速信息處理能力使無位置傳感器控制技術的復雜算法能得以實現。
無位置傳感器控制系統是指利用電機繞組中的有關電信號,通過適當方法估計出轉子的電氣和機械位置以及轉速等,從而取代傳感器,實現電機的閉環控制。永磁交流伺服電機系統是一個多變量,強耦合的非線性系統,人們將現代控制理論、非線性理論和一些其他領域的研究成果應用于永磁交流伺服電機無位置傳感器控制系統中,提出了較為可行的方法。這些估計方法大體可分為兩類:①基于電機電磁關系的位置估計方法;②基于各種觀測器的位置估計方法。基于電機電磁關系的位置估計方法有:直接檢測定子三相端電壓和電流,利用它們計算出轉子位置角和轉速;檢測電機相電感的變化來估計轉子位置;檢測電樞繞組反動電勢過零點來判斷轉子位置的反電動勢法;通過計算定子磁鏈來估計轉速和轉子位置的方法等等。基于各種觀測器的位置估計方法的實質是狀態重構,其原理是重新構造一個系統,利用原系統中可直接測量的變量作為它的輸入信號,并使其輸出所需信號的方法。如擴展卡爾曼濾波法、全階狀態觀測器法、模型參考自適應法、滑模變結構法、基于人工智能理論的各種估算方法等等[6,7]。隨著新技術的發展,不斷還有新的無位置傳感器轉子位置檢測理論及方法的提出,無位置傳感器技術將會得到越來越廣泛的應用。以下簡單介紹幾種無位置傳感器的轉子位置估算方法。
(1)瞬時電壓方程法。利用電動機各相瞬時電壓和電流方程,實時計算電動機由靜止到正常運轉任一時刻轉子的位置,控制電動機的運行。該方法不需專門的起動線路,電路簡單,起動轉矩大,但對電動機本體的數學模型依賴性大,當電動機參數因溫度變化發生漂移時,容易造成建模誤差,使精確度受到影響。另外,由于在線計算復雜,計算量很大,考慮到轉子位置檢測的實時性,必須采用具有快速運算能力的DSP和高速A-D轉換器[3]。
(2)反電動勢法。反電動勢法是最常用的無刷電機(BLDC)無傳感器控制方法,其基本原理是通過檢測各相繞組反電動勢的過零點來判斷轉子磁極的換相位置。對于常見的兩相導通三相六狀態工作方式,除了換相的瞬間之外,在任意時刻,電動機總有一相繞組處于斷電狀態。當斷電相繞組的反電動勢過零之后,再經過 30°電角度,就是該相的換向點。因此,只要檢測到各相繞組反電動勢的過零點,就可以確定電動機的轉子位置和下次換流的時間。反電動勢法有兩個主要缺陷:當電動機在靜止或低速運行時,反電動勢為零或太小,因而無法利用;又由于該方法在原理上作了近似處理,忽略了電樞反應和濾波產生的反電動勢過零點與實際轉子位置不一致,因而需要采用相應的誤差補償措施[8]。
(3)高頻信號注入法。通過檢測基波反電動勢來獲得轉子位置的方法雖然簡單,但僅適用于高速運行時,在零速或低速時會因檢測不到反電動勢而不適用。高頻信號注入法則是利用電動機的凸極效應來追蹤轉子位置的一種方法,可以在全轉速范圍內有效地檢測轉子的空間位置。其基本原理是在電機中注入特定的高頻電壓(電流)信號,然后檢測對應的電流(電壓)信號以確定轉子的凸極位置,多采用的是高頻電壓信號注入,且注入的高頻電壓信號可為旋轉高頻電壓信號或脈動高頻電壓信號。
旋轉高頻電壓注入法是在基波上疊加一個三相平衡的高頻電壓激勵信號,然后檢測對應的高頻電流響應并通過特定的信號處理來獲取轉子位置信息。此種方法主要應用于凸極率較大的永磁體內置式電機。脈動高頻電壓注入法只是在估計轉子旋轉坐標系中的直軸上注入高頻正弦電壓信號,該信號在靜止坐標系中是一個脈動電壓信號,更適用于凸極率較小的表貼式電機。兩種方法相比較,脈動高頻電壓注入法跟蹤精度高,靜態和動態性能更好,無需對轉子位置估算角度進行補償。旋轉高頻電壓注入法的轉子位置檢測系統較為復雜,轉子位置估算角度需作相位補償,且轉子位置信息提取過程的算法對系統的動態性能影響較大,但其轉子位置檢測系統自成一體,因此更易于調試和實現[9,10]。
(4)模型參考自適應法。模型參考自適應法是一種較常用的估算轉子位置和速度的方法,模型參考自適應辨識的主要思想是將含有待估計參數的方程作為可調模型,將不含未知參數的方程作為參考模型,兩個模型具有相同物理意義的輸出量。兩個模型同時工作,并利用兩個模型輸出量的誤差根據適合的自適應律來實時調節可調模型的參數,以達到控制對象的輸出跟蹤參考模型輸出的目的。當差值為零時,可認為此時估計的轉子位置為真實位置[11]。模型的選取和電機參數的變化會直接影響轉速辨識,運算的繁瑣也可能會使辨識與調整跟不上擾動變化,可通過采用高速DSP并與其他控制技術相結合(如結合高頻信號注入法等)來改善控制效果。
(5)滑模變結構控制。滑模變結構控制是一種非線性控制,在PMSM中該方法是基于給定電流與反饋電流間的誤差來重構電機的反電動勢,估算轉子速度。滑模變結構控制的本質是滑模運動,通過結構變換開關,以很高的頻率來回切換,快速修正反電動勢,使估算電流和實際電流相等。滑模運動與控制對象的參數變化以及擾動無關,具有很好的魯棒性。滑模變結構控制由于其魯棒性強、動態響應快、易于工程實現等優點得到了廣泛的應用,但由于其本質上是不連續的開關控制,不可避免會引起系統發生抖振,應用時應采取合適的方法來削弱和抑制抖振。同時因該方法是通過觀測電機的反電動勢來得到轉速,低速時不能得到很好的控制效果[12,13]。
(6)擴展卡爾曼濾波(EKF)法。擴展卡爾曼濾波(EKF)法是一種基于最小方差的最優狀態預測估計方法,將線性系統狀態估計的卡爾曼濾波算法應用于永磁交流伺服電機這種非線性系統中,以迭代法為基礎,實現對PMSM的非線性最優狀態估計。結合卡爾曼濾波原理,首先通過測量逆變器直流母線電壓,再利用DSP生成的SVPWM控制信號,檢測電機定子三相電壓值與電流值,對三相電壓、電流值進行坐標變換后輸入擴展卡爾曼濾波器中,經過擴展卡爾曼濾波運算得出調速系統的狀態估計值(轉速和電機轉子位置角信息),來代替機械式位置傳感器測量的轉子位置和轉速,并用于矢量控制和速度反饋。與其他方法相比,擴展卡爾曼濾波(EKF)法能有效抑制系統誤差和測量誤差對狀態估計的影響,狀態估計精度高、收斂速度快,是無傳感器控制方法中較好的速度觀測方法[13-15]。
(7)神經網絡控制法。神經網絡是一種大規模并行的非線性動力學系統,它采用工程技術方式模擬人腦神經網絡的結構和功能,可以充分逼近任意復雜的非線性關系,具有信息的分布存儲、并行處理以及自學習能力。隨著現代智能控制技術的發展,利用人工神經網絡與各種算法相結合來進行永磁交流伺服系統無傳感器轉子速度和位置辨識已取得可喜的成果。如與傳統的PID控制相結合,神經網絡被用來精確估計位置及轉速;與模型參考自適應控制相結合,將神經網絡控制器用作自適應速度控制器;與小波技術相結合,采用魯棒小波神經元控制;將神經網絡廣義逆算法引入模型參考自適應的控制策略等等[16-18]。
(8)模糊控制。模糊控制是將模糊數學的基本理論應用于工程實踐中,它不需要建立被控對象的精確數學模型,能夠簡化系統設計的復雜性,特別適應于解決非線性、時變及滯后、模型不完全的系統問題,具有適應能力強,系統的魯棒性強,規則和參數整定方便等優點。對于PMSM這種多變量、較難建立精確模型的復雜系統,模糊控制技術將有很大的發揮空間。但它也存在難以達到較高的控制精度,模糊控制規則難以確定,缺乏系統而有規律的模糊規則設計方法等缺點,使用中對控制專家的經驗依賴性較大,這個特點既是優點也是缺點。同神經網絡一樣,模糊控制的應用更多的是與其他控制算法相結合,如與滑模控制相結合,與遺傳算法相結合,與神經網絡相結合等等[19-21]。
無位置傳感器的永磁交流伺服電機控制系統,免去傳感器安裝和維護的不便,提高了系統的可靠性,降低了成本。在越來越多的場合,無位置傳感器控制技術應用基本可以取代部分有傳感器的伺服系統,實現無傳感器運行。無傳感器技術采用的位置估算方法種類很多,各有不同的優缺點和適應范圍,經常是幾種方法聯合使用,以求得到更佳的控制效果。但還存在較多的問題需要解決,比如算法復雜,需要有高精度的數字信號處理器;受電機參數影響較大;檢測精度低,如上面介紹的前幾種方法實際上只是檢測到了電機轉子的磁極位置,而速度的檢測精度以及機械位置的精度都不是很高;低速時運行性能較差,無傳感器控制還很難在電機(非凸極)靜止時從電機的電氣特性獲得轉子的初始位置。只有電機起動到一定的轉速后,才能將電機切換至無位置傳感器運行狀態,電機初始轉子位置檢測和起動問題仍然是永磁交流伺服電機無傳感器運行有待解決的難題之一。總的來說,在高精度的伺服驅動場合,無位置傳感器的伺服系統還很難取代有位置傳感器的伺服系統。
4 伺服系統用傳感器現狀及發展趨勢
編碼器與旋轉變壓器是目前永磁交流伺服系統中應用最多的兩類角位傳感器。
在國內市場上,編碼器的技術及產品發達國家具有明顯優勢,歐美廠商牢牢占據高端市場,市場占有量達40%,產品價格昂貴,主要以HEIDENHAIN(海德漢)、RENISHAW(雷尼紹)等品牌為代表;日韓廠商占據中端市場,市場占有量約 35%,以TAMAGAVA(多摩川)、KOYO(光洋)等為代表;國內品牌多為低端產品,市場占有量約25%,主要有長春光機所等。
旋轉變壓器的技術及產品則是國內外水平相當,國外品牌主要有日本TAMAGAVA(多摩川)、日本MINEBEA(美蓓亞);德國LTN;美國HAROWE(丹納赫集團下屬公司)等。國內主要制造廠商有西安微電機研究所等。
近年來,交流伺服系統處于蓬勃發展階段,正朝著智能化方向快速發展,每年都有先進的技術展現。伺服控制系統中的各個組成部分相應的也有了飛速發展,傳感裝置與技術也無例外。新型傳感器發展的總趨勢是微型化、多功能化、高精度化、智能化、網絡化和高可靠性以及無傳感器技術等[22]。
從結構上來講,追求的是多樣化,即針對不同使用場合及不同電機結構時傳感器結構及外形可以是千變萬化的;在伺服控制精度要求不高時,傳感器注重的是簡單化,即盡可能簡化以求高性價比,如僅一個簡單芯片或霍爾片,以提高產品競爭力;在一體化和集成化方面,傳感器的部分功能可以集成在驅動器的芯片甚至利用軟件來實現,比如DSP等;通信的總線化,采用通用或專用通信協議來實現傳感器的網絡化;傳感器精度和分辨率是保障伺服系統性能的關鍵因素之一,因而高精度和高分辨率是傳感器永恒的追求,如光電編碼器分辨率已達到229,還要追求更高,無刷旋變精度從目前的角分級追求達到角秒級,磁編碼器有望超過 217等等;為適應伺服系統的高速化,傳感器還需要在機械結構強度、對頻率的響應速度以及信號的處理速度等多方面盡量優化,以提高響應頻率及自身結構對高速的適應性;高可靠性發展將體現在傳感器的抗干擾能力、無刷化結構、多余度設計等方面,如磁阻旋變、磁性編碼器以及LVDT等就是一類具有高可靠性優勢的產品;除此之外,新工藝、新材料、新器件、新結構以及新原理的不斷研究和應用,也將促使傳感器在精度、分辨率、穩定性及可靠性等各方面得以有效提升[23]。
無傳感器技術的發展將體現在新理論、新方法、新算法的不斷涌現,以提高控制精度并改善其控制性能;同時各種算法的互相結合及優勢互補將使無位置傳感器控制更加完善;新的高速處理器件的出現也將進一步促進無傳感器技術取得長足的發展。
[1] GB/T 7665-2005傳感器通用術語[S]. 北京: 中國標準出版社, 2005.
[2] 西安微電機研究所編. 實用微電機手冊[M]. 沈陽:遼寧科學技術出版社, 2003.
[3] 中國電氣工程大典編輯委員會編. 中國電氣工程大典, 第9卷, 電機工程[M]. 北京: 中國電力出版社,2008.
[4] 葉偉. 適應于高速永磁電機的多模式轉子位置檢測技術研究[D]. 哈爾濱: 哈爾濱工業大學, 2010.
[5] 韓安太, 郭小華. 基于線性霍爾傳感器的新型交流伺服系統設計[J]. 微電機, 2009(6): 43-47.
Han Antai, Guo Xiaohua. Design of novel AC servo system based on linear hall effect sensors[J]. Micromotors, 2009(6): 43-47.
[6] 于艷君, 程樹康, 柴鳳. 永磁同步電動機無傳感器控制綜述[J]. 微電機, 2007, 40(8): 58-61.
Yu Yanjun, Cheng Shukang, Chai Feng. Overview of sensorless control of permanet-magnet synchrounos motor[J]. Micromotors, 2007, 40(8): 58-61.
[7] 李翠萍. 基于卡爾曼濾波的無傳感器永磁電機矢量控制研究[D]. 哈爾濱: 哈爾濱工業大學, 2007.
[8] 吳紅星, 葉宇驕, 倪天, 等. 無刷電機轉子位置檢測技術綜述. 微電機[J]. 2011(8): 75-81.
Wu Hongxing, Ye Yujiao, Ni Tian, et al. Summary of detecting rotor position technique for brushless DC motor[J]. Micromotors, 2011(8): 75-81.
[9] 秦峰, 賀益康, 劉毅, 等. 兩種高頻信號注入法的無位置傳感器運行研究[J]. 中國電機工程學報,2005, 25(5): 116-121.
Qin Feng, He Yikang, Liu Yi, et al. Comparative investigation of sensorless control with two highfrequency signal injection schemes[J]. Proceedings of the CSEE, 2005, 25(5): 116-121.
[10] 鄭澤東, 李永東, Maurice Fadel. 采用Kalman濾波器進行信號處理的高頻信號注入法在電動機控制中的應用[J]. 電工技術學報, 2010, 25(2): 54-59.
Zheng Zedong, Li Yongdong, Maurice Fadel. Application of high frequency signal injection method in motor control using Kalman filter for signal processing[J]. Transactions of China Electrotechnical Society,2010, 25(2): 54-59.
[11] 常凱. 基于模型參考自適應的永磁同步電機無速度傳感器控制系統的設計[D]. 沈陽: 東北大學, 2009.
[12] 蘇健勇, 楊貴杰, 李鐵才. PMSM 擴展狀態滑模觀測器及轉子位置和速度估算[J]. 電機與控制學報,2008, 12(5): 524-528.
Su Jianyong, Yang Guijie, Li Tiecai.Extended state sliding mode observer of PMSM and estimation of rotor position plus speed[J].Electric Machines and Control, 2008, 12(5): 524-528.
[13] 朱軍, 韓利利, 汪旭東. 永磁同步電機無位置傳感器控制現狀與發展趨勢[J]. 微電機, 2013(9): 11-16.
Zhu Jun, Han Lili, Wang Xudong. Status and trends of sensorless control algorithm for PMSM[J]. Micromotors, 2013, 46(9): 11-16.
[14] 王琛琛, 李永東. 基于EKF的異步電機無速度傳感器矢量控制方法[J]. 清華大學學報: 自然科學版,2008, 48(10): 1545-1548.
Wang Shenshen, Li Yongdong. A speed sensorless vector control method of IM using extended Kalman filter[J]. 2008, 48(10): 1545-1548.
[15] Janiszewski, Dariusz. Sensorless control of permanent magnet synchronous motor based on unscented Kalman filter[C]. International Conference on Power Engineering, Energy and Electrical Drives, 2011: 1-6.
[16] 夏常亮, 李志強, 王明超, 等. 基于 RBF神經網絡在線辨識的無刷直流電機單神經元PID模型參考自適應控制[J]. 電工技術學報, 2005, 20(11): 65-69.
Xia Changliang, Li Zhiqiang, Wang Mingchao, et al.Single neuron PID model reference adaptive control for PM rushless DC motors based on RBF neural network on-line identification[J]. Transactions of China Electrotechnical Society, 2005, 20(11): 65-69.
[17] 強勇, 凌有鑄, 賈冕茜. 基于 RBF神經網絡的永磁同步電機速度控制[J]. 微電機, 2013, 46(4): 53-56.
Qiang Yong, Ling Youzhu, Jia Mianqian. Speed control of PMSM based on RBF neural network[J]. Micromotors, 2013, 46(4): 53-56.
[18] 李毓洲, 陽林. 基于小波神經網絡的永磁同步電機無速度傳感器控制[J]. 微電機, 2010(7): 53-56.
Li Yuzhou, Yang Lin. Speed sensorless control of the permanent magnet sychronous motor based on wavelet neural networks[J]. Micromotors, 2010(7): 53-56.
[19] 許振偉, 蔣靜坪, 駱再飛. 模糊模型算法控制的永磁同步電動機位置伺服控制系統[J]. 電工技術學報,2003, 18(4): 99-102.
Xu Zhenwei, Jiang Jingping, Luo Zaifei. Permanent magnet synchronous motor position servo system controlled by fuzzy model algorithmic control[J].Transactions of China Electrotechnical Society, 2003,18(4): 99-102.
[20] 高子龍, 李志剛. 基于模糊控制策略的位置伺服系統研究[J]. 微電機, 2013, 46(1): 67-71.
Gao Zilong, Li Zhigang. Research of position servo system based on fuzzy controller[J]. Micromotors,2013, 46(1): 67-71.
[21] Thiemann P, Mantala C, Mueller T, et al. Sensorless control for buried magnet PMSM based on direct flux control and fuzzy logic[C]. IEEE Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, 2011: 405-412.
[22] 莫會成, 閔琳, 王健, 等. 現代高性能永磁交流伺服系統綜述—永磁電機篇[J]. 微電機, 2013, 46(9):1-10.
Mo Huicheng, Min Lin, Wang Jian, et al. Summarizing commentary on modern high-performance AC servo system—PM servo motor[J]. Micromotors, 2013, 46(9):1-10.
[23] 莫會成, 王健, 任雷. 現代高性能永磁交流伺服系統綜述—驅動控制篇[J]. 微電機, 2013, 46(1): 1-8.
Mo Huicheng, Wang Jian, Ren Lei. Summarizing commentary on modern high-performance AC servo system—drive and control[J]. Micromotors, 2013, 46(1):1-8.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
通信電源技術(2018年3期)2018-06-26 06:33:30
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
海峽科技與產業(2016年3期)2016-05-17 04:32:12
