集裝箱船型線多速度點的數(shù)值優(yōu)化
2015-11-17 05:33:04陳紅梅王金寶
船舶 2015年6期
陳紅梅 馮 毅 于 海 王金寶
(中國船舶及海洋工程設(shè)計研究院 上海 200011)
集裝箱船型線多速度點的數(shù)值優(yōu)化
陳紅梅 馮 毅 于 海 王金寶
(中國船舶及海洋工程設(shè)計研究院 上海 200011)
為獲得更優(yōu)化的EEDI指數(shù),集裝箱船需要基于營運范圍內(nèi)的型線優(yōu)化,以實現(xiàn)油耗降低。文章以某集裝箱船為研究對象,利用數(shù)值優(yōu)化集成系統(tǒng),采用最優(yōu)化技術(shù)、曲面自由變形技術(shù)(FFD)和計算流體力學(xué)技術(shù)(CFD),對船體首部型線進行優(yōu)化。數(shù)值計算表明:所得到的優(yōu)化型線高速段功率略有增加、低速段功率顯著降低。
數(shù)值優(yōu)化集成系統(tǒng);最優(yōu)化技術(shù);自由變形技術(shù);計算流體力學(xué)技術(shù)
引 言
降低船舶的設(shè)計航速,將導(dǎo)致所需推進功率的相應(yīng)降低[1]。集裝箱船的航速曾一度為25 kn左右(高速段),然而,自2008年開始,部分集裝箱船的平均航速降至20 kn左右(低速段)甚至更低,以獲得更優(yōu)化的EEDI指數(shù)。這催生出新的集裝箱船設(shè)計理念,即在盡量保持高速段的阻力性能之下,追求低速段的阻力性能。
本文采用數(shù)值優(yōu)化集成系統(tǒng),應(yīng)用最優(yōu)化技術(shù)、曲面參數(shù)化和自由變形技術(shù),對集裝箱船的首部,針對多速度點下的興波阻力系數(shù)進行多目標(biāo)優(yōu)化設(shè)計,并對原型方案和優(yōu)化方案進行總阻力的數(shù)值驗證,證實本文的多點數(shù)值優(yōu)化方法比較成功。
1 數(shù)值優(yōu)化集成系統(tǒng)
文中采用的數(shù)值優(yōu)化集成系統(tǒng)[2]主要由優(yōu)化平臺軟件OPTIMUS、曲面變形軟件DEP-Morpher、船舶性能評估CFD軟件SHIPFLOW組成。采用該集成系統(tǒng)對船體曲面的水動力性能進行優(yōu)化時,利用OPTIMUS軟件中的最優(yōu)化技術(shù),對目標(biāo)函數(shù)進行尋優(yōu)[3];利用DEP-Morpher中的參數(shù)化技術(shù)和自由變形技術(shù),對曲面進行改型和自動光順[4];利用SHIPFLOW軟件中的勢流求解器,對目標(biāo)函數(shù)進行數(shù)值預(yù)報[5]。
對于本文建立的數(shù)值優(yōu)化集成系統(tǒng),通過優(yōu)化軟件平臺,將船舶流體力學(xué)數(shù)值計算軟件和曲面變形軟件無縫連接,實現(xiàn)船型自動優(yōu)化。從而可以無需人為干預(yù),進行較大量的方案考察,找到符合工程要求的較優(yōu)化船型。
所建的優(yōu)化平臺主要工作流程如圖1所示。
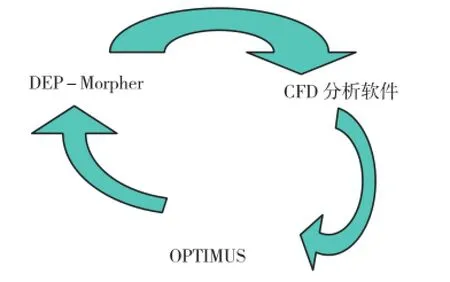
圖1 工作流程圖
2 集裝箱船首部型線多速度點的優(yōu)化
2.1 優(yōu)化任務(wù)要求
眾所周知,不同的球首設(shè)計方案有自己的航速適用范圍,例如,適用于低速段的球首,在高速段阻力性能可能變差,故而球首的設(shè)計優(yōu)化往往是針對設(shè)計點進行,兼顧多速度點的性能,使型線設(shè)計具有一定難度。
本文優(yōu)化設(shè)計的對象為萬箱級集裝箱船。對原方案A在滿載吃水狀態(tài)下(13 m),采用FLUENT軟件就3個速度點,即14 kn、18 kn和23 kn,進行數(shù)值計算評估,評估結(jié)果顯示,中低速遠(yuǎn)不能滿足技術(shù)指標(biāo)要求,高速點還稍有裕度。
本文采用數(shù)值優(yōu)化集成系統(tǒng),在方案A基礎(chǔ)上進行優(yōu)化,對上述吃水狀態(tài)下不同速度的興波阻力系數(shù)進行數(shù)值自動優(yōu)化,期望所有考核速度點阻力均減小,尤其需要加大低速段的阻力減小幅度。這是一項多速度點下對首部型線的多目標(biāo)優(yōu)化設(shè)計任務(wù),根據(jù)要求,本次的改型范圍限制在全船長的首部兩站,主要對球首進行改型設(shè)計。
2.2 首部多速度點優(yōu)化設(shè)計
2.2.1 建立優(yōu)化問題的數(shù)值模型
(1)目標(biāo)函數(shù)
本次優(yōu)化的目標(biāo)為設(shè)計吃水下三個不同速度時,興波阻力系數(shù)Cw最小,見表1。
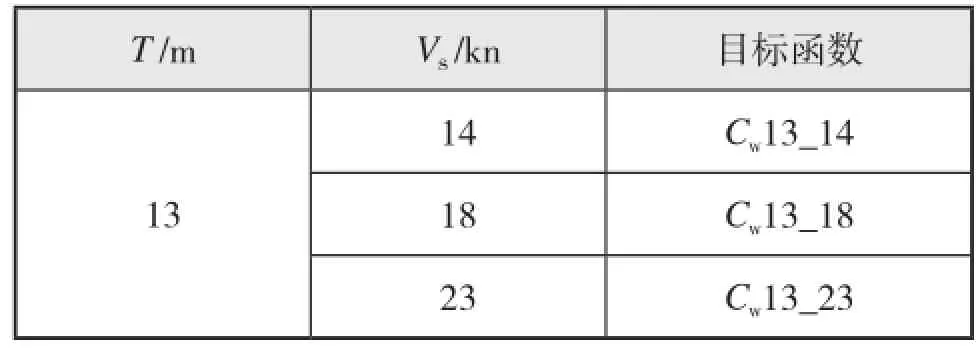
表1 不同工況
(2)曲面參數(shù)化及定義設(shè)計變量
優(yōu)化是一個復(fù)雜的計算求解過程,設(shè)計變量的個數(shù)是影響優(yōu)化所需時間的重要因素。在優(yōu)化過程中采用參數(shù)化技術(shù),對船體曲面進行局部或者整體參數(shù)化,減小設(shè)計變量個數(shù),提高優(yōu)化效率,而不明顯影響優(yōu)化效果[6-8]。
由于優(yōu)化對象速度變化范圍較大,不同速度下興波阻力值較優(yōu)的船型一般差別很大。為了解決船型變化太大導(dǎo)致船體曲面變形時可能不光順的問題,在DEP-Morpher中采用FFD技術(shù)對首部參數(shù)化時,所有的設(shè)計變量均設(shè)置在一個控制體內(nèi)[9],如圖2所示。
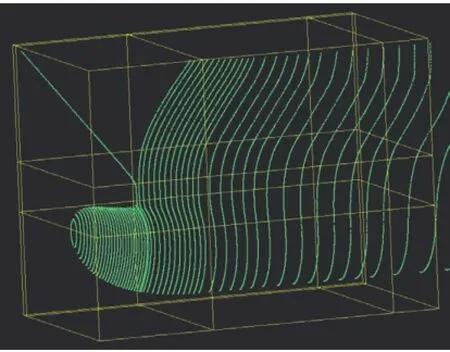
圖2 控制體
在控制體的頂點上分別選取適當(dāng)?shù)目刂泣c,對球首的主要參數(shù)進行參數(shù)化,即以控制點沿x軸、y軸、z軸的位置變動量dx、dz、dy為設(shè)計變量,分別對應(yīng)球首三個特征參數(shù),即球首的長度、高度、寬度的變化。圖3所示為沿Y軸移動控制點實現(xiàn)球首寬度的變化。
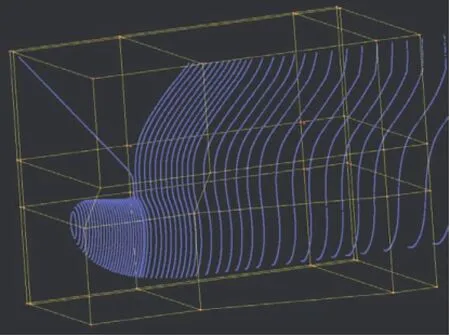
圖3 移動控制點改變球首的寬度
(3)約束條件
在確定設(shè)計變量的變化范圍時,首先根據(jù)經(jīng)驗分析不同速度點時球首的特征參數(shù)最佳值。然后在DEP-Morpher中,在最佳值兩側(cè),改變設(shè)計變量的值,確定設(shè)計變量的變化范圍,見表2。表中負(fù)值表示球首長度、寬度以及高度對應(yīng)減小,正值則反之。

表2 設(shè)計變量的變化范圍
2.2.2 優(yōu)化設(shè)計結(jié)果及其分析
以SHIPFLOW為計算分析軟件,采用曲面變形網(wǎng)格軟件DEP-Morpher進行曲面變形,在OPTIMUS中建立的流程圖見圖4。
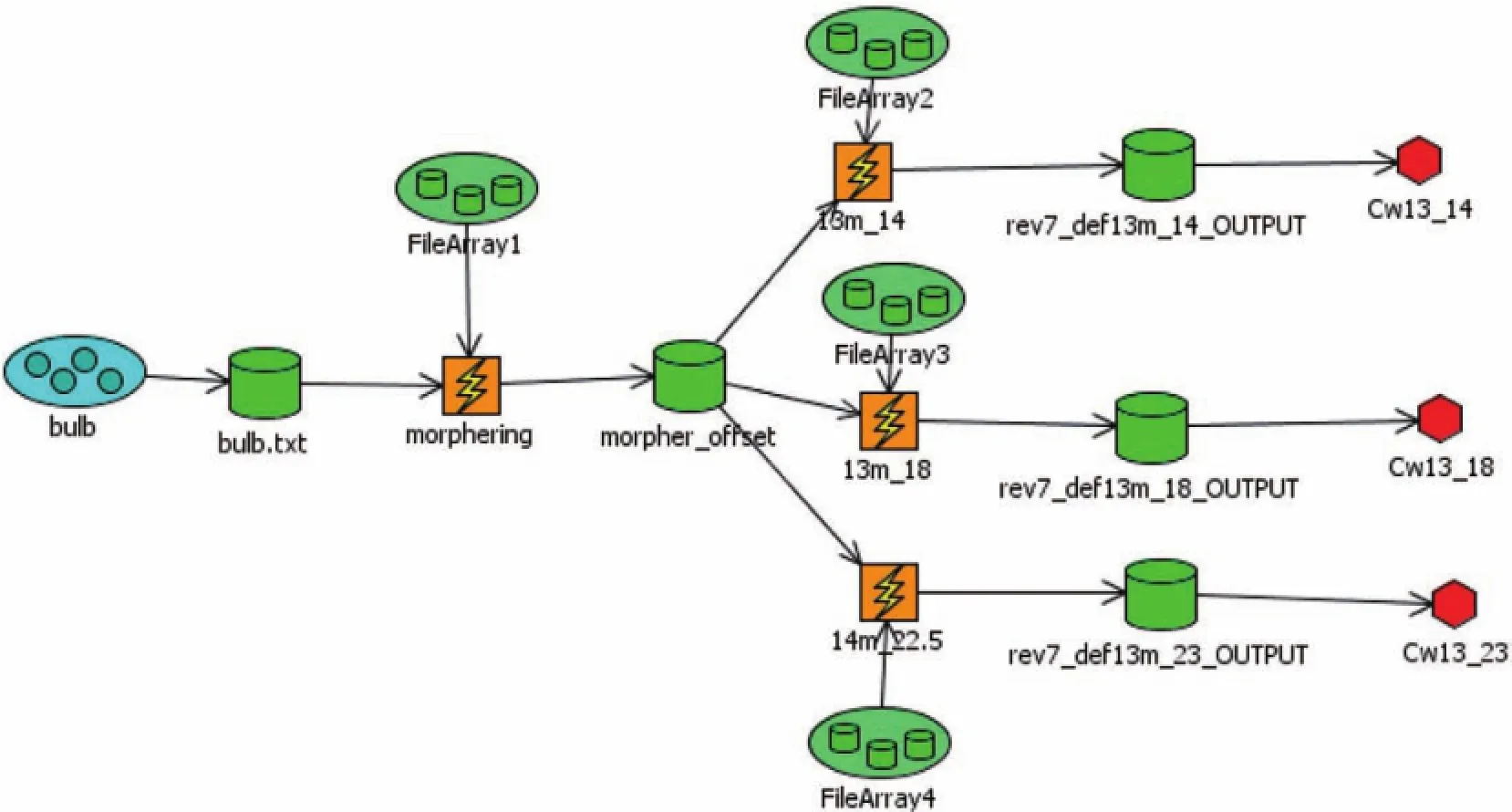
圖4 流程圖
根據(jù)建立的流程圖,首先采用Latin-Hypercube方法,進行試驗設(shè)計(DOE),共計算100個方案。試驗設(shè)計,既可獨立進行一定程度的優(yōu)化工作,也可看作進一步數(shù)值優(yōu)化工作必要的前處理。本次優(yōu)化設(shè)計的設(shè)計變量為3個,但樣本點的數(shù)量遠(yuǎn)超設(shè)計變量。而從試驗設(shè)計得到的結(jié)果,可以指導(dǎo)后續(xù)優(yōu)化方案的設(shè)定,有可能大大提高優(yōu)化效率,而不明顯影響優(yōu)化效果。
在作進一步優(yōu)化時,采用全局準(zhǔn)則多目標(biāo)優(yōu)化方法,目標(biāo)為不同工況狀態(tài)下興波阻力系數(shù)最小。在全局準(zhǔn)則多目標(biāo)優(yōu)化方法中,目標(biāo)函數(shù)的排序不同,優(yōu)先程度也不同,權(quán)重與目標(biāo)的排序有關(guān),排序第一的目標(biāo)函數(shù),權(quán)重較大,排序最后的目標(biāo)函數(shù),權(quán)重最小。根據(jù)優(yōu)化要求,主要減小低速段的興波阻力系數(shù),所以3個目標(biāo)函數(shù)的排序為Cw13_14、Cw13_18、Cw13_23。
同時,根據(jù)試驗設(shè)計(DOE)計算結(jié)果中各速度點的興波阻力系數(shù)較優(yōu)的設(shè)計變量,構(gòu)建出組合方案,作為本次優(yōu)化的起始點。
這樣,多目標(biāo)優(yōu)化時得到最優(yōu)方案B,設(shè)計變量值的比較見表3,首部型線比較見圖5。原方案A和最優(yōu)方案B目標(biāo)函數(shù)(興波阻力系數(shù))比較見表4。
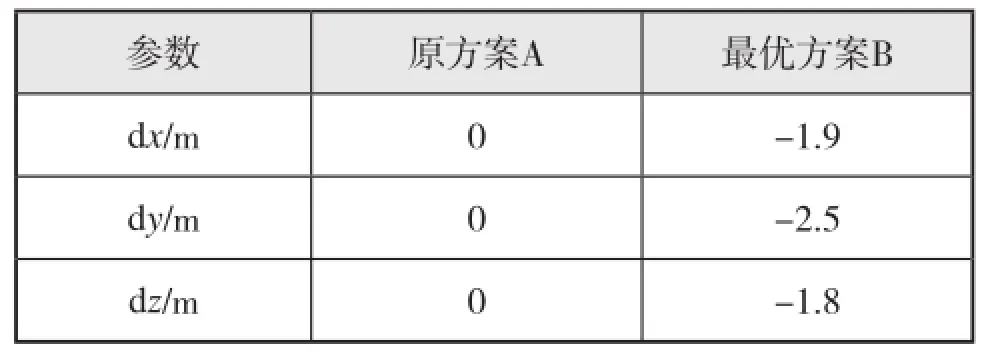
表3 不同方案設(shè)計變量值的比較
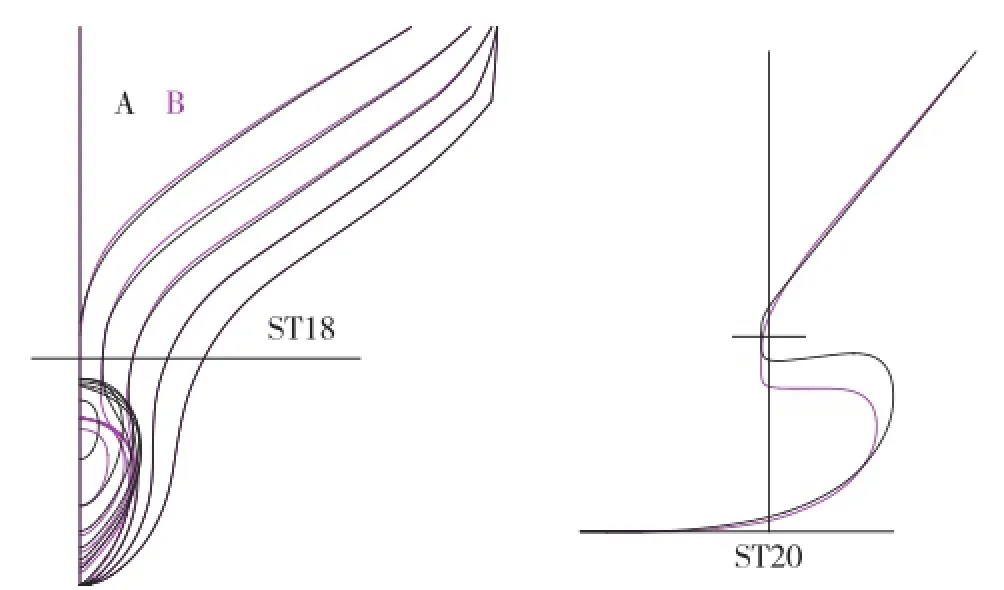
圖5 最優(yōu)方案(B)與方案(A)首部比較
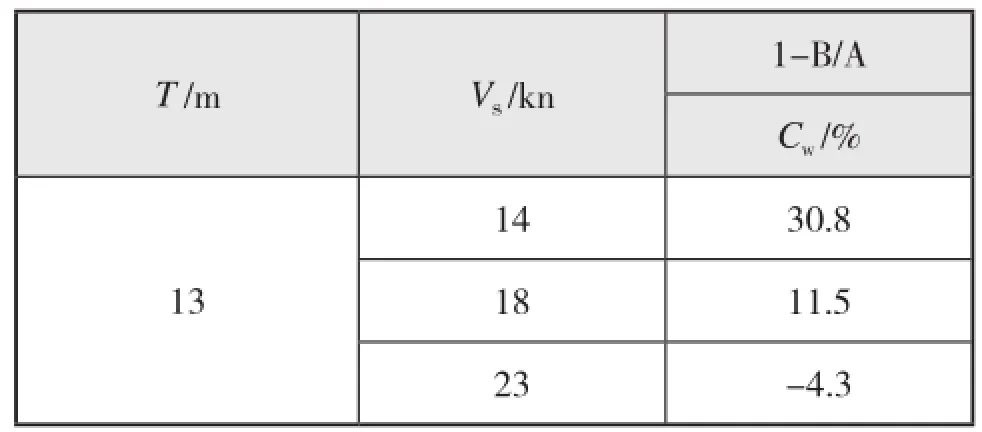
表4 最優(yōu)方案(B)和原始方案(A)目標(biāo)函數(shù)值的相對差異
從表3和圖5可知,最優(yōu)方案B與方案A相比,球首的主要參數(shù)長度、寬度、高度均有減小。根據(jù)球首的減阻機理,該球首可對低速段船體興起的波浪產(chǎn)生有利干擾。從表4可見,在低速段興波阻力值有較好改善,而高速段阻力有所增加。整體上取得了比方案A更優(yōu)的效果。
3 優(yōu)化結(jié)果的數(shù)值驗證[10]
在此次優(yōu)化工作中,僅以不同方案的興波阻力為目標(biāo)進行優(yōu)選,對總阻力并未進行考核。因此,對原型方案A和最優(yōu)方案B,有必要采用算法更為嚴(yán)謹(jǐn)?shù)牧鲌鲇嬎丬浖M行數(shù)值驗證。
本文采用FLUENT軟件,通過求解RANS方程,以總阻力為目標(biāo)進行數(shù)值驗證。對不同方案,所有的邊界條件和網(wǎng)格劃分方法均相同。2個方案的實船總阻力結(jié)果比較見表5。
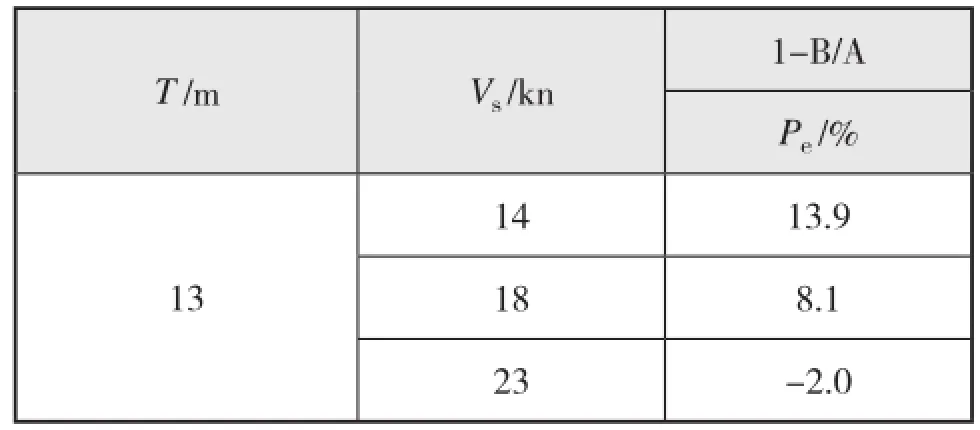
表5 最優(yōu)方案(B)和原始方案(A)實船總阻力的相對差異
從表5比較可知,在不同速度下,計算所顯示的B相對A的優(yōu)化效果與自動優(yōu)化結(jié)果定性一致,即低速段的阻力性能更優(yōu),而高速段的阻力性能略有降低。
不同方案、不同速度點的波形比較見下頁圖6。
比較兩個方案的波型:速度14 kn和18 kn,A方案球首偏大,產(chǎn)生的擾動過強,對該速度范圍減阻不利;B方案球首正上方的水面提升和船體首部的波形有明顯改善,球首對船體的興波形成有利干擾。速度23 kn,A方案的首部波形比B方案好,B方案在該速度點首波峰和波谷均增大,阻力性能變差。可見,球首小對低速較有利,但是速度增高,阻力性能就會變差。粘性計算與勢流計算結(jié)果一致。
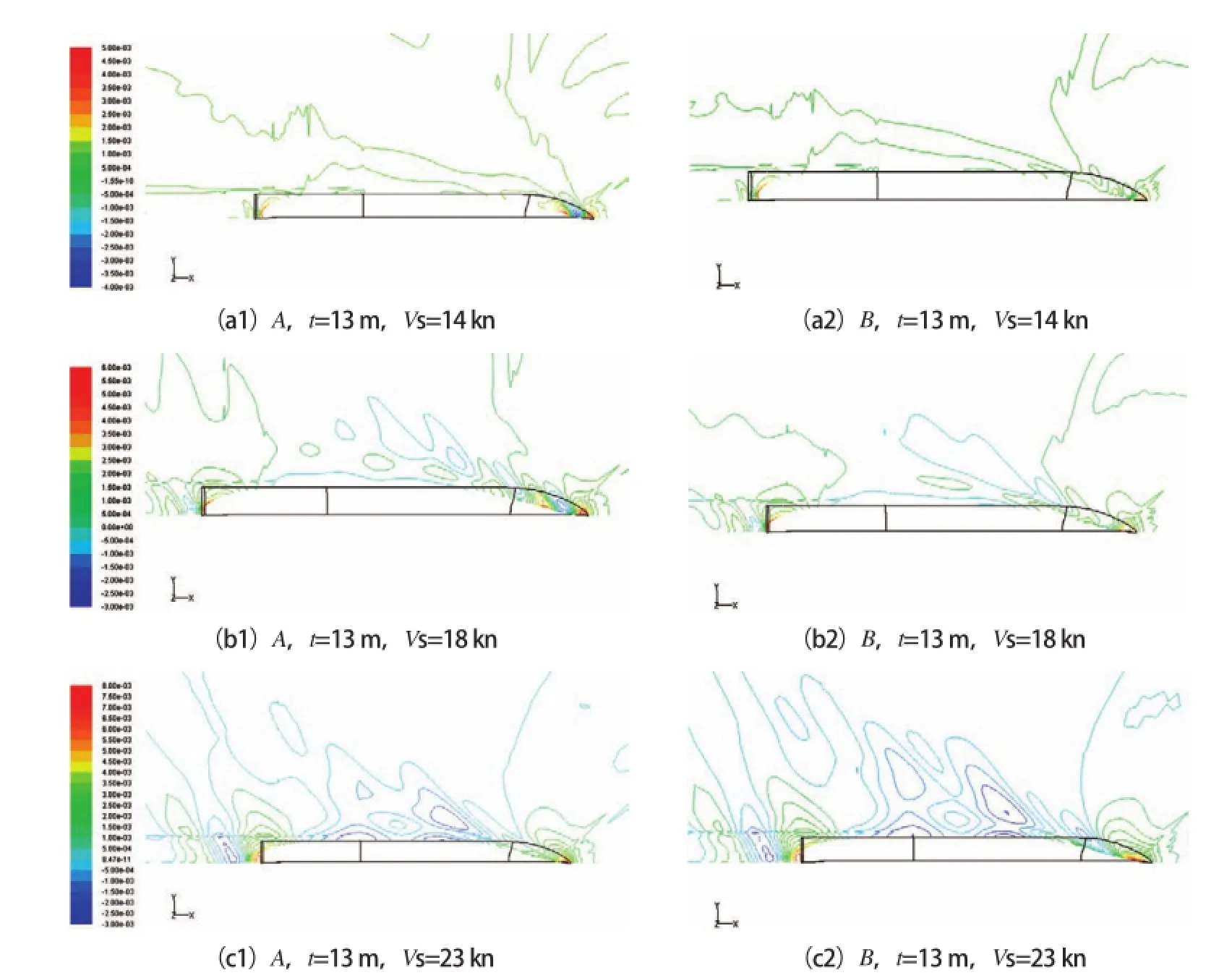
圖6 波型
4 結(jié) 論
本文利用建立的數(shù)值優(yōu)化集成系統(tǒng),采用最優(yōu)化技術(shù)、FFD參數(shù)化技術(shù)和CFD技術(shù),對萬箱級集裝箱船的首部型線進行不同速度點的興波阻力優(yōu)化,并進行總阻力的數(shù)值驗證,結(jié)果表明采用數(shù)值優(yōu)化系統(tǒng)的首部型線自動優(yōu)化方法切實可行、卓有成效,可應(yīng)用于船型優(yōu)化。
多目標(biāo)優(yōu)化設(shè)計問題,相對于憑借經(jīng)驗的人工改型,具有較強的挑戰(zhàn)性。本文采用數(shù)值優(yōu)化集成系統(tǒng)進行船型優(yōu)化,獲得較理想的優(yōu)化效果,說明采用最優(yōu)化技術(shù)在一定程度上可以超越人的經(jīng)驗,尋找到更優(yōu)的船型設(shè)計方案,并可能帶來創(chuàng)新的船型設(shè)計思路。對本文的優(yōu)化方案,后期會進行模型試驗的驗證,不斷完善數(shù)值優(yōu)化集成系統(tǒng)的功能。
[ 1 ] 諸琳.對新造船能效設(shè)計指數(shù)的思考[J].船舶工程,2012(1):29-31.
[ 2 ] 陳紅梅,蔣技赟.船舶水動力性能的數(shù)值優(yōu)化集成系統(tǒng)研究[J].船舶,2012(2):21-24.
[ 3 ] Optimus Revision 10 Theoretical Background[M]. 2011:25-26.
[ 4 ] DEP-morpher 5.0 Help Manual[M]. 2010:405-412.
[ 5 ] SHIPFLOW 4.7 Help Manual[M]. 2012:117-133.
[ 6 ] 李勝忠.基于SBD技術(shù)的船舶水動力構(gòu)型優(yōu)化設(shè)計研究[D].北京:中國艦船研究院博士論文,2012.
[ 7 ] 趙峰,李勝忠,楊磊,等. 基于CFD 的船型優(yōu)化設(shè)計研究進展綜述.船舶力學(xué),2010(7):812-821.
[ 8 ] 馮佰威,劉祖源,常海超,等.船舶CAD/CFD一體化設(shè)計過程集成技術(shù)研究[J].武漢理工大學(xué)學(xué)報(交通科學(xué)與工程版),2010(4):649-651.
[ 9 ] 陳紅梅.數(shù)值優(yōu)化集成系統(tǒng)在船舶水動力性能設(shè)計中的應(yīng)用.[D].上海:中國船舶及海洋工程設(shè)計研究院,2013:51-52.
[10] 萬箱集裝箱船優(yōu)化設(shè)計和CFD計算報告[R].中國船舶及海洋工程設(shè)計研究院,2015.
Numerical optimization of hull lines of container ship
at multi-speed points
CHEN Hong-mei FENG Yi YU Hai WANG Jin-bao
(Marine Design & Research Institute of China, Shanghai 200011, China)
The hull form of a container ship is optimized during its operation to attain optimal EEDI index,resulting in the reduction of oil consumption. The bow of a container ship is optimized based on the numerical optimization integration system, which incorporates the optimization technique, the free-form deformation (FFD)technique, and the computational fl uid dynamics (CFD) technique. The numerical results show that the power of the optimized hull line increases slightly at high speed, but decrease remarkably at low speed.
numerical optimization integration system; optimization technique; FFD technique; CFD technique
U661.31+2
A
1001-9855(2015)06-0008-05
2015-03-31
陳紅梅(1977-),女,博士,高級工程師,研究方向:船舶型淺自動優(yōu)化。
馮 毅(1982-),男,碩士,高級工程師,研究方向:船舶快速性。
于 海(1980-),男,碩士,高級工程師,研究方向:船舶CFD計算。
王金寶(1969-),男,博士,研究員,研究方向:船舶CFD研究。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
船舶(2021年4期)2021-09-07 17:32:22
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16