一種履帶式全方位移動平臺轉向滑移功率比分析
2015-11-18 06:09:55張豫南黃濤張舒陽張杰
兵工學報 2015年8期
張豫南,黃濤,2,張舒陽,張杰
(1.裝甲兵工程學院控制工程系,北京100072;2.63983部隊,江蘇無錫214035)
一種履帶式全方位移動平臺轉向滑移功率比分析
張豫南1,黃濤1,2,張舒陽1,張杰1
(1.裝甲兵工程學院控制工程系,北京100072;2.63983部隊,江蘇無錫214035)
針對現有全方位移動平臺在工程應用的局限性,結合Mecanum輪和傳統履帶行走機構的結構原理,提出全方位移動履帶,并描述履帶式全方位移動平臺的布局結構。由于履帶在轉向過程中也不可避免地存在與地面之間的滑動,為了比較履帶式全方位移動平臺與傳統履帶式移動平臺的轉向滑動阻力功耗,提出轉向滑移功率比的概念,并分析中心轉向的滑移功率比。研制采用獨立電驅動的原理樣車。當滾輪鎖住時,樣車可等效為傳統履帶式移動平臺。分別測量在滾輪自由和鎖住兩種狀態下樣車以最高速度勻速中心轉向時的總功耗,即電池的輸出電流。試驗結果表明,樣車在滾輪自由狀態下的轉向總功耗比滾輪鎖住狀態下的轉向總功耗減小了約53%.因此,履帶式全方位移動平臺可以改善傳統履帶式移動平臺的轉向功率消耗。
兵器科學與技術;全方位移動履帶;移動平臺;轉向滑移功率比
0 引言
全方位移動平臺是一類在地面上可實現3自由度運動(包括縱向運動、橫向運動、中心轉向運動以及它們的任意復合運動)的平臺。它們具有高度靈活的機動性,特別適用于狹小空間或精確定位場合。目前,全方位移動平臺的行走機構有多種,主要以輪式為主,包括Mecanum輪、連續切換輪、球輪、正交輪和萬向輪等[1],其中Mecanum輪式全方位移動平臺已在軍事[2]、倉儲運輸[3]、醫療設備[4]和社會服務[5]等領域得到了廣泛應用。輪式全方位移動平臺在工程應用中仍具有很大的局限性,普遍存在行駛振動大、載重能力有限以及對路面條件要求高等問題。
眾所周知,傳統履帶式移動平臺具有運動平穩、載重能力強和越野能力強等優點。因此,本文為了克服現有全方位移動平臺在工程應用中的局限性,結合Mecanum輪和傳統履帶式行走機構的結構原理,提出一種新型履帶行走機構——全方位移動履帶[6],并設計了履帶式全方位移動平臺。盡管國外相關研究人員已研制出4種可實現全方位運動的履帶式行走機構,包括Omnidirectional spherical tire track[7],VUTON crawler[8],Omnidirectional free roller crawler[9-10],Omni-crawler[11-12],如圖1所示。但是,上述機構還未在工程領域推廣應用,并且它們的越野性能遠不如傳統履帶行走機構。另外,基于VUTON crawler和Crawler-roller running mechanism平臺的履帶組布局結構也不適用于工程車輛。
本文研究的履帶式全方位移動平臺不僅可以實現全方位運動,還基本保留傳統履帶式移動平臺的越野性能和履帶組布局結構。Mecanum輪式全方位移動平臺具有靈活的轉向性能,轉向阻力很小且主要為滾輪的滾動阻力。而傳統履帶式移動平臺的轉向性能差,轉向阻力很大且主要為履帶板與地面之間橫向的滑動阻力。全方位移動履帶是上述兩種機構相結合的產物,它在轉向時既會存在滾動阻力,又會存在滑動阻力。因此,本文主要分析履帶式全方位移動平臺與傳統履帶式移動平臺的轉向性能。
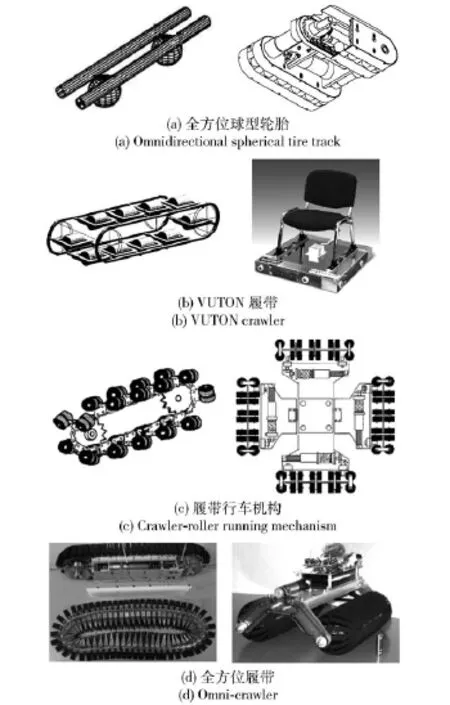
圖1 現有的履帶式全方位行走機構及平臺Fig.1 The existing tracked omnidirectional running mechanisms and platforms
1 履帶式全方位移動平臺
1.1 全方位移動履帶的原理結構
全方位移動履帶的原理結構如圖2所示。它具有傳統履帶行走機構的基本結構,包括履帶、驅動輪、負重輪和托帶輪等。其主要區別在于履帶的結構。它是由一定數量的履帶板通過銷軸鉸接而成,在每塊履帶板下方安裝有滾輪,滾輪為圓柱形并且可以自由轉動。滾輪軸線與履帶板上銷孔軸線構成一定的夾角,定義為偏置角α,其中,優選因此,全方位移動履帶在地面上運動有兩個運動自由度:一是沿縱向運動,即履帶的卷繞方向;二是沿垂直于接地滾輪軸線方向運動。另外,在每塊履帶板下方可以設計有多個滾輪,從而在履帶環上形成多排滾輪,增大履帶的接地面積。
1.2 平臺的布局結構
全方位運動是由“全方位移動履帶”的組合實現的。由于平臺實現全方位運動的必要條件是其逆運動學方程的速度逆雅可比矩陣列滿秩,即秩為3[13],所以平臺的履帶數量不少于3[14].另外,考慮到平臺的越野性能和履帶組布局結構的工程實用性,因此本文研制的履帶式全方位移動平臺采用4條履帶縱向對稱布局結構[14],如圖3所示。
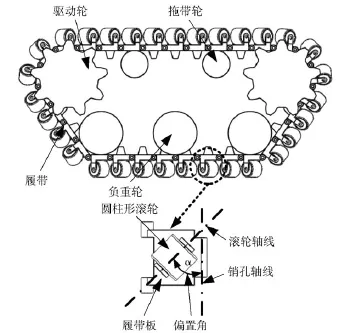
圖2 全方位移動履帶的原理結構Fig.2 Principle structure of the omni-track
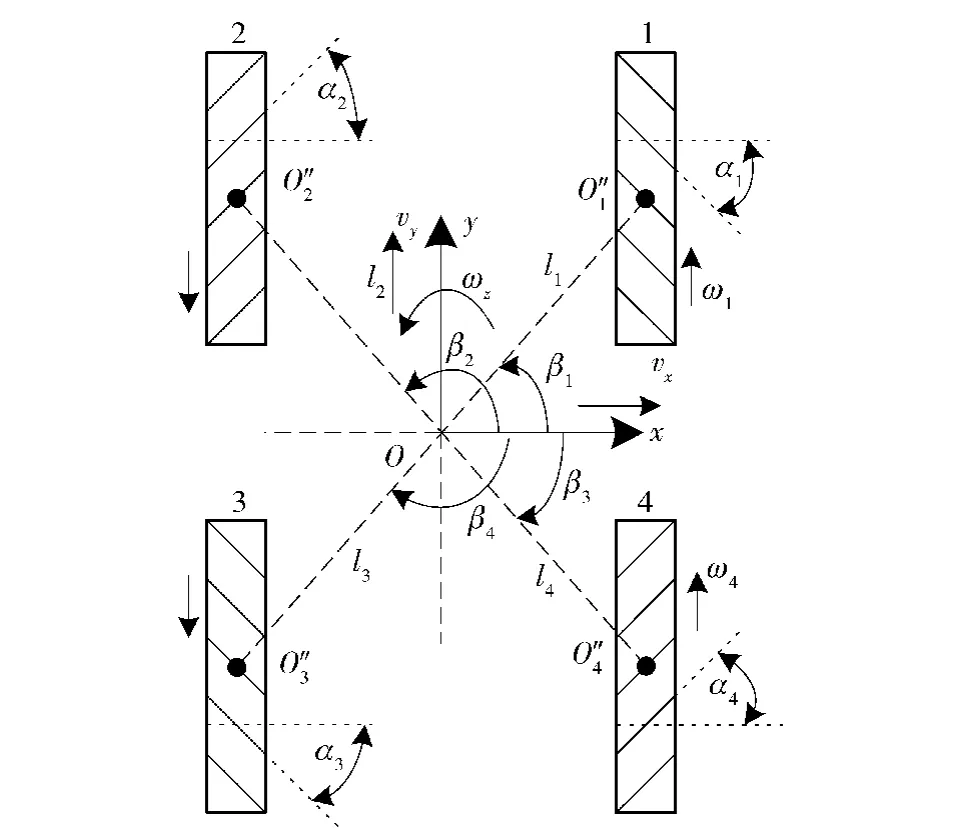
圖3 履帶式全方位移動平臺的布局結構(俯視圖)Fig.3 The layout structure of the tracked omnidirectional mobile platform(top view)
圖3中,4個矩形框分別代表4條全方位移動履帶的接地段,框中斜線方向代表接地滾輪的軸線方向。定義圖中的參數如下:(ω1ω2ω3ω4)T為驅動輪的角速度;(vr1vr2vr3vr4)T為滾輪的滾動速度;(vyvxωz)T為平臺中心的速度;r為驅動輪半徑;l1=l2=l3=l4=l;-α1=α2=-α3=α4= γ;θ1=θ4=0,θ2=θ3=π rad;β1=β,β2=π-β,β3= β-π rad;因此,履帶式全方位移動平臺的逆運動學方程[14]為

由于(ω1ω2ω3ω4)T為主動變量,而(vr1vr2vr3vr4)T為被動變量,所以J為平臺的速度逆雅可比矩陣,并且rank(J)=3.
2 轉向滑移功率比分析
對于傳統履帶式移動平臺,當其進行轉向運動時,由于同一履帶接地段上各點距離轉向中心的長度向量不相同,所以各點的牽連速度向量不相同。然而,在理想條件下,它們的相對速度向量均相同,為履帶沿縱向的卷繞速度。因此,它們的絕對速度向量也不相同且不都為0.由于傳統履帶行走機構不可能具有橫向的相對速度,所以在轉向過程中將產生橫向的完全滑移,可能還存在縱向的部分滑移或滑轉(不考慮履帶寬度時,可忽略不計)。橫向滑移是造成傳統履帶車輛轉向功率消耗大的主要因素。
對于履帶式全方位移動平臺,當其進行轉向運動時,雖然同一履帶接地段上各點的牽連速度向量不相同,但是各點的相對速度向量可以不相同,因為每個滾輪可以獨立轉動。盡管同一滾輪上的接地點的相對速度是相同的,但是滾輪的長度相對較短,為了簡化分析,仍將每個接地滾輪視為一個接地點。已知全方位移動履帶的接地段可等效為其幾何中心點[14],因此幾何中心點的絕對速度在理想條件下應為0,即不產生滑移。對于其他接地點,由于在垂直于滾輪軸線方向可具有獨立的相對速度,所以在垂直于滾輪軸線方向只產生滾動而不產生滑移,在平行于滾輪軸線方向仍產生滑移。總之,全方位移動履帶由于有偏置的自由滾輪,可以將傳統履帶行走機構在轉向過程中產生的橫向滑移部分轉化為滾輪的滾動。由于滾動阻力遠小于滑動阻力,所以全方位移動履帶可以減小傳統履帶式移動平臺的轉向滑移功率消耗,從而提高其轉向效率。當滾輪被鎖住,即不能自由轉動時,全方位移動履帶即可等效為傳統履帶行走機構。因此,為了比較履帶式全方位移動平臺與傳統履帶式移動平臺的轉向效率,本文定義了一個新的概念——轉向滑移功率比ξ:

式中:P和P′分別表示履帶式全方位移動平臺和與其等效的傳統履帶式移動平臺在轉向運動中的滑移功率消耗;μ為地面的滑動摩擦系數;G為平臺重力;分別表示上述兩種平臺的平均轉向滑移速度。
履帶與地面間的滑移運動隨著轉向半徑變小而增大,直到中心轉向時達到最高值[15]。因此,本文主要分析中心轉向的滑移功率比。假設全方位移動履帶具有任意排滾輪,分析其任意接地點的轉向滑移速度,如圖4所示。

圖4 任意接地點的轉向滑移速度分析Fig.4 Steering slip velocity of any ground contact point
圖4中:O點為轉向中心,與平臺幾何中心o點重合;A點為接地段幾何中心,B點為任意接地點;OXY為全局坐標系,并與平臺坐標系oxy重合;o″x″y″為履帶坐標系,o?x?y?為任意接地點坐標系,其中y?軸與滾輪軸線平行;τ為o″x″與o″o?構成的角度。
履帶運動是一種復合運動,它是由兩種運動組成:一種是牽連運動,即履帶隨同車體相對于地面的運動;一種是相對運動,即履帶相對于車體的運動[16]。定義牽連速度向量為νq,相對速度向量為νl,絕對速度向量為νf,并且滿足:

由于全方位移動履帶有兩個運動自由度,所以其相對速度向量由這兩個自由度的速度向量合成。定義vm為履帶相對于車體的卷繞速度向量,vr為沿垂直于滾輪軸線方向的相對速度向量,則有

假設平臺的轉向角速度為ωz,那么A點和B點的牽連速度分別為
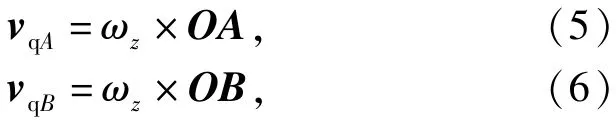
式中:|OA|=l.
聯立(5)式、(6)式,可得

式中:vAB=ωz×AB.
已知A點的滑移為0,由(3)式、(4)式可得A點的絕對速度:

同理,B點的絕對速度為

由上述分析已知vfB沿y?軸方向,因此(9)式可等效為

聯立(7)式、(10)式,可得

已知:

聯立(11)~(13)式,可得

再聯立(8)式、(13)式和(15)式,可得

由圖4可知:

定義(lx″ly″)為B點在o″x″y″坐標系的位置,則

聯立(15)式~(18)式,可得

(19)式為任意接地點的絕對速度(滑移速度),根據積分中值定理,可求接地段的平均滑移速度:

由圖4可知:
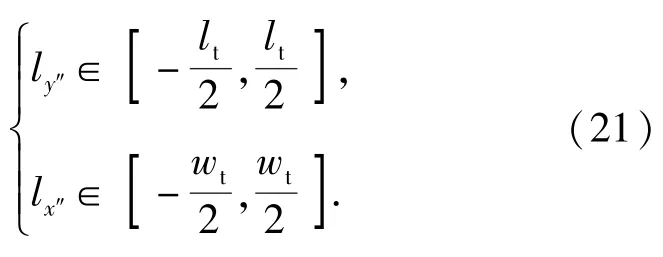
聯立(19)式~(21)式,可得
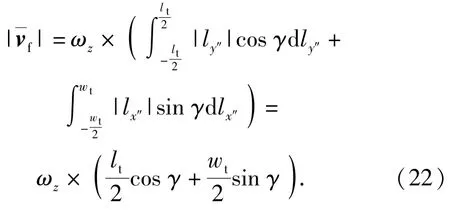
當滾輪被鎖住,即不能自由轉動時,全方位移動履帶將變為一個等效的傳統履帶行走機構。同理,分析等效的傳統履帶式移動平臺的平均轉向滑移速度為

因此,轉向滑移功率比為
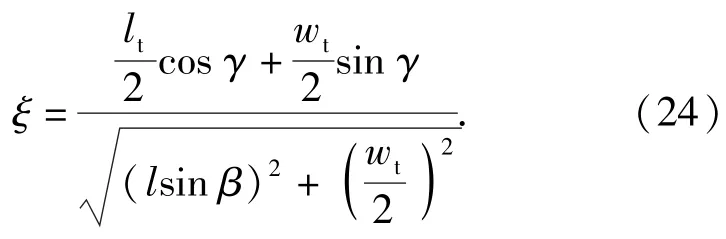
由圖4可知,通常有
因此,聯立(24)式、(25)式,可得

因此,履帶式全方位移動平臺的轉向滑移功率消耗要小于傳統履帶式移動平臺,故轉向效率高。當時,由于ξ<0.707,履帶式全方位移動平臺的轉向滑移功率消耗至少減小約30%.Mecanum輪可視為全方位移動履帶的一種特例,因為它為點接地(接地段長度和寬度均為0)。根據(24)式可知Mecanum輪式全方位移動平臺的轉向滑移功率比為0,不存在滑動阻力的功率消耗。總而言之,履帶式全方位移動平臺的轉向性能要好于傳統履帶式移動平臺,但不如Mecanum輪式全方位移動平臺。
另外,由(22)式可知,在滾輪偏置角確定的情況下,平均轉向滑移速度只與履帶接地段的尺寸有關,與平臺的布局尺寸無關。因此,為了盡可能減小履帶式全方位移動平臺的轉向滑移功率消耗,本文提出以下兩個設計原則:
1)在滿足平臺承重要求的前提下,盡可能縮短履帶接地段的長度。
2)履帶接地段的長度通常遠大于其寬度。當需要增大履帶接地面積時,優先考慮增加滾輪的排數。
3 樣車及試驗
為了驗證履帶式全方位移動平臺的轉向性能,本文研制了履帶式全方位移動平臺的原理樣車,如圖5所示。
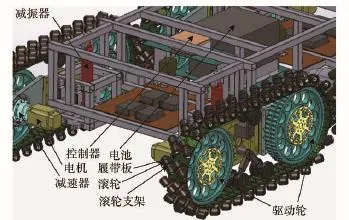
圖5 原理樣車的三維示意圖Fig.5 The three-dimensional diagram of the prototype
由(1)式可知,要實現全方位運動,平臺上每條履帶必須具有獨立的速度,并且能夠快速響應,因此平臺采用獨立電驅動系統。本文中樣車的每條履帶由兩個直流無刷電機驅動。為了保證全方位運動的精度,電機采用速度控制模式,通過三軸操縱桿和運動控制器遙控控制樣車的運動方向和速度。樣車的主要參數如表1所示。
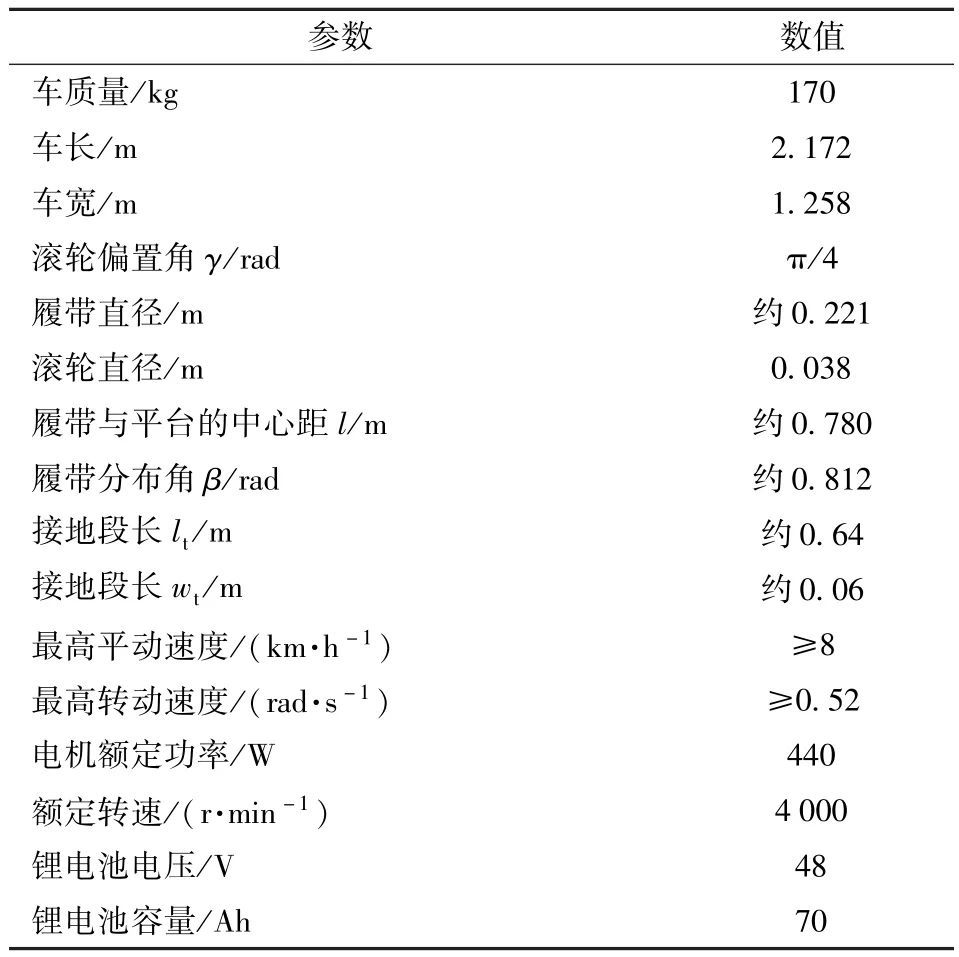
表1 樣車的主要參數Tab.1 Primary parameters of prototype
樣車的總轉向功率消耗主要包括沿履帶縱向的地面變形阻力、沿接地滾輪軸線方向的滑動阻力、垂直于接地滾輪軸線方向的滾動阻力、履帶銷軸的摩擦及電氣部件等的功率消耗。相比滑動阻力部分的功率消耗,其他的功率消耗相對較小。另外,由于樣車上每條履帶同時由兩個電機驅動,并且電機采用速度控制模式,所以也會存在因兩個電機不完全同步而產生的功率消耗。相比傳統履帶行走機構,全方位移動履帶能夠減小的轉向功率消耗主要是滑動阻力部分的功率消耗,上面定義的轉向滑移功率比是滑動阻力部分的功率消耗比。然而,在實際試驗中,難以單獨測量出每一部分的功率消耗。因此只能測量和比較樣車的總轉向功耗,即電池的輸出電流比。為了便于試驗,本文控制樣車以最高速度勻速中心轉向,分別測量在滾輪自由和鎖住兩種狀態下電池的輸出電流。具體試驗過程如下:選取一段平坦的水泥路面作為試驗路面,控制操縱桿使樣車達到并保持最高轉速(約為0.52 rad/s),同時利用示波器和鉗流表探頭測量電池的輸出電流,如圖6所示。
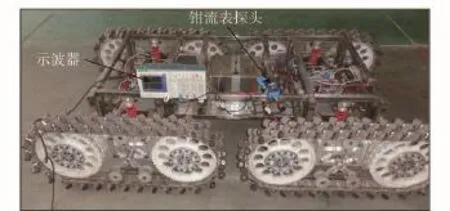
圖6 測量電池的輸出電流Fig.6 Illustration of the measurement of output current of the battery
在滾輪自由狀態下,保存勻速狀態下任一時間段內的電流曲線如圖7(a)所示,并計算其平均值約為13.53 A;同理,在滾輪鎖住(由于滾輪中未安裝軸承,在每個滾輪與其支架之間增加墊片即可鎖住)的狀態下,得到的電流曲線如圖7(b)所示,計算其平均值約為28.93 A.
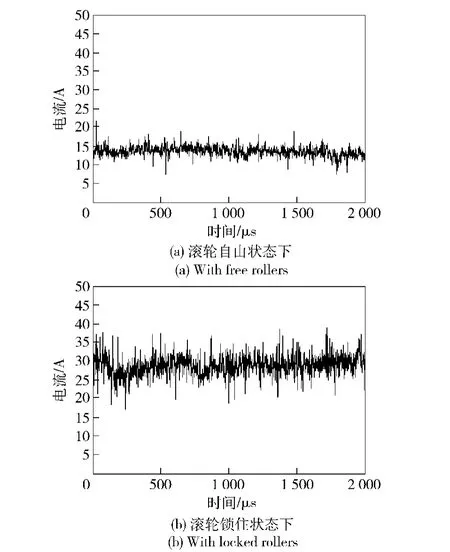
圖7 中心轉向時電池輸出電流曲線Fig.7 Output current of battery in center-point steering motion
本文雖然無法直接測量出克服轉向滑動阻力時電池所需輸出的電流,但是結合在滾輪自由狀態下樣車以最高速度進行縱向運動時電池的輸出電流約為8.68 A,由此可大致估算出克服轉向滑動阻力時電池的輸出電流約為4.84 A.因為根據(1)式可知,僅當平臺進行縱向運動(沿y軸運動)時,接地滾輪不產生滾動,也不產生滑動,所以平臺縱向運動時的主要功率消耗是除滾輪滑動阻力和滾動阻力部分以外的功率消耗。另外,由于在平坦路面上進行試驗,所以滾輪滾動阻力的功耗很小,可忽略不計。
取地面滑動摩擦系數為0.76,電機效率為0.8,結合表1所示的參數,由(2)式、(24)式可得在滾輪自由狀態下輸出電流的理論平均值約為4.24 A,這與試驗估算結果接近。由此,可以驗證理論分析的正確性。
雖然難以準確計算出實際的轉向滑移功率比,但是根據兩種狀態下平臺的總轉向功率消耗比(約0.47),可以表明樣車比同等條件下的傳統履帶式移動平臺的轉向功率消耗減少了約53%.
眾所周知,傳統履帶式移動平臺轉向時對路面容易產生破壞。因此,為了驗證履帶式全方位移動平臺更加高效的轉向性能,本文利用樣車在一段不平的土路上進行了中心轉向試驗,如圖8所示。由圖8可知,樣車在中心轉向時,對路面的磨損很小,從而間接表明履帶式全方位移動平臺能夠提高傳統履帶式移動平臺的轉向性能。
4 結論
全方位移動履帶是一種新型履帶式行走機構,它通過滾輪的自由轉動將傳統履帶式行走機構在轉向過程必然存在的橫向滑移部分轉化為滾輪的滾動,從而減小了轉向的功率消耗,這從根本上改善了傳統履帶式移動平臺的轉向性能。當然,在一些比較惡劣的路面上,如松軟的泥地等,由于滾輪的滾動阻力可能會增大許多,甚至滾輪無法自由轉動,所以實際轉向滑移功率比會增大,甚至接近于1.因此,本文分析的轉向滑移功率比是基于滾輪可以自由轉動的條件下所提出的。總之,履帶式全方位移動平臺的轉向性能介于傳統履帶式移動平臺和Mecanum輪式全方位移動平臺之間,它可以改善傳統履帶式移動平臺的轉向性能。
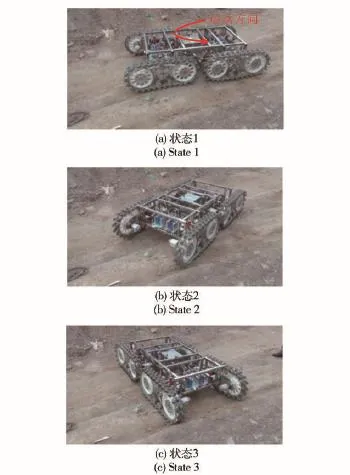
圖8 不平土路上中心轉向測試Fig.8 The center-point steering test on an uneven dirt road
(
)
[1]趙冬斌,易建強.全方位移動機器人導論[M].北京,科學出版社,2010. ZHAO Dong-bin,YI Jian-qiang.Introduction of omni-directional mobile robots[M].Beijing:Science Press,2010.(in Chinese)
[2]McGowen H.Navy omni-directional vehicle(ODV)development:where the rubber meets the deck[J].Naval Engineers Journal,2000,112(4):217-228.
[3]王雙雙.全方位移動平臺運動仿真與控制研究[D].北京:裝甲兵工程學院,2012. WANG Shuang-shuang.Research on simulation and motion control of omnidirectional platform[D].Beijing:Academy of Armored Forces Engineering,2012.(in Chinese)
[4]侍才洪.一種傷員換乘轉運機器人的設計研究[D].北京:軍事醫學科學院,2010. SHI Cai-hong.Development of the robot for transferring the injuried[D].Beijing:Academy of Military Medical Sciences,2010.(in Chinese)
[5]Jung W K,Hyun S H,Bong S K,et al.Assistive mobile robot systems helping the disable walkers in a factory environment[J]. International Journal of ARM,2008,9(2):42-52.
[6]張豫南.一種全方位移動履帶及其平臺:中國,ZL201320057326.9[P].2013-07-24. ZHANG Yu-nan.An omnidirectional mobile track running mechanism and platform:China,ZL201320057326.9[P].2013-07-24.(in Chinese)
[7]West M,Asada H.Design of a holonomic omnidirectional vehicle[C]∥Proceedings of IEEE Internatioanl Conference on on Robotics and Automation.Piscataway,NJ,US:IEEE,1992:97-103.
[8]Damoto R,Cheng W,Hirose S.Holonomic omni-directional vehicle with new omni-wheel mechanism[C]∥Proceedings of IEEE International ConfErence on Robotics and Automation.Piscataway,NJ,US:IEEE,2001:773-778.
[9]Chen P,Mitsutake S,Isoda T,et al.Omni-directional robot and adaptive control method for off-road running[J].IEEE Transactions on Robotics and Automation,2002,18(2):251-256.
[10]Chen P,Koyama S,Mitsutake S,et al.Automatic running planning for omni-directional robot using genetic programming[C]∥Proceedings of IEEE International Symposium on Intelligent Control. NY,US:IEEE,2002:485-489.
[11]Tadakuma K,Tadakuma R,Kinoshita H,et al,Mechanical design of cylindrical track for Ssideways motion[C]∥Proceedings of IEEE International Conference on Mechatronics and Automation.Piscataway,NJ,US:IEEE,2008:161-167.
[12]Tadakuma K,Tadakuma R,Nagatani K,et al.Crawler vehicle with circular cross-section unit to realize sideways motion[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ,US:IEEE,2008:2422-2428.
[13]王一治,常德功.Mecanum四輪全方位系統的運動性能分析及結構形式優選[J].機械工程學報,2009,45(5):307-310. WANG Yi-zhi,CHANG De-gong.Motion performance analysis and layout selection for motion system with four mecanum wheels[J].Journal of Mechanical Engineering,2009,45(5):307-310.(in Chinese)
[14]黃濤,張豫南,田鵬,等.一種履帶式全方位移動平臺的設計與運動學分析[J].機械工程學報,2014,50(21),206-212. HUANG Tao,ZHANG Yu-nan,TIANG Peng,et al.Design& kinematics analysis of a tracked omnidirectional mobile platform[J].Journal of Mechanical Engineering,2014,50(21):206-212.(in Chinese)
[15]Merhof W,Hackbarth E M.履帶車輛行駛力學[M].韓雪海,劉侃,周玉瓏,譯.北京:國防工業出版社,1989. Merhof W,Hackbarth E M.Running mechanics of tracked vehicle[M].HAN Xue-hai,LIU Kan,ZHOU Yu-long,translated. Beijing:National Defense Industry Press,1989.(in Chinese)
[16]汪明德,趙毓芹,祝嘉光.坦克行駛原理[M].北京:國防工業出版社,1983. WANG Ming-de,ZHAO Yu-qin,ZHU Jia-guang.Driving principle of tank[M].Beijing:National Defense Industry Press,1983.(in Chinese)
Analysis about Steering Slip Power Ratio of a Tracked Omnidirectional Mobile Platform
ZHANG Yu-nan1,HUANG Tao1,2,ZHANG Shu-yang1,ZHANG Jie1
(1.Department of Control Engineering,Academy of Amored Force Engineering,Beijing 100072,China;2.Unit 63983 of PLA,Wuxi 214035,Jiangsu,China)
For the limitations of the existing omnidirectional mobile platforms in engineering applications,an omnidirectional track is proposed based on the structure principles of the Mecanum wheel and conventional tracked running mechanisms,and the layout structure of the tracked omnidirectional mobile platform is described.A new concept of steering slip power ratio is proposed by comparing the power consumption of steering sliding resistance of the tracked omnidirectional mobile platform with that of conventional tracked mobile platform because of inevitable slippage between the omnidirectional track and ground in steering motion.And the slip power ratio of steering motion at center point is analyzed.A prototype equipped with an independent electric driving system is developed.When the rollers are locked,the prototype is equivalent to an conventional tracked mobile platform,so the total power consumption of steering motion at center point,which is the total output current of the battery,is measured at the highest and uniform speed in the conditions of free rollers and locked rollers.The results show that the total power consumption of the prototype with free rollers is approximately 53%less than that of the prototype with locked rollers in the center-steering motion.
ordnance science and technology;omnidirectional track;mobile platform;steering slippower ratio
U270
A
1000-1093(2015)08-1562-07
10.3969/j.issn.1000-1093.2015.08.026
2014-09-09
國防重點項目(2015ZB15)
張豫南(1961—),男,教授,博士生導師。E-mail:zhang_yunan@sina.com