重型自動機械變速車輛換擋序列優化
2015-11-18 06:09:19劉海鷗晉磊董詩瑾苗成生
兵工學報 2015年8期
關鍵詞:優化
劉海鷗,晉磊,董詩瑾,苗成生
(北京理工大學機械與車輛學院,北京100081)
重型自動機械變速車輛換擋序列優化
劉海鷗,晉磊,董詩瑾,苗成生
(北京理工大學機械與車輛學院,北京100081)
重型車輛在動力性和燃油經濟性上有較大的提升空間。分析了配備自動機械變速器(AMT)的重型車輛換擋動力中斷特性,在此基礎上建立了AMT重型車輛整車模型,并利用動態規劃(DP)求解出重型車輛在確定道路下的最優綜合性能換擋序列。計算對比原有換擋規律和DP決策下的車輛運行性能,仿真結果表明,通過調整運行耗時和燃油消耗量的加權因子,可以獲得兼備動力性和燃油經濟性的綜合性能最優換擋序列,在保證AMT重型車輛動力性的前提下改善了燃油經濟性,對AMT重型車輛的自動控制具有指導意義。
兵器科學與技術;重型自動機械變速車輛;動態規劃;換擋序列優化;最優綜合性能
0 引言
工程機械、越野車以及重型輪式機動平臺等都面臨著工作環境復雜,動力性能與續航能力需求高,能量消耗大的問題[1],因此必須考慮其綜合性能。軍用地面無人平臺的研究主要集中在運動規劃和環境感知等方向,其控制主要考慮的問題在于無人平臺的定位和路徑跟蹤等[2],但少有人考慮無人平臺本身動力性和燃油經濟性的研究。目前燃油經濟性已經成為汽車行業發展的一個焦點,利用GPS定位、三維道路譜提供的數據改善燃油效率是較常見的方法。
相對于配用其他變速器的平臺,配用自動機械變速器(AMT)的重型車輛具有機械結構簡單,傳動效率較高,使用成本低等特點[3]。然而,AMT的機械結構又決定了其在換擋過程中的動力中斷,因此當車輛所處的道路條件為上坡時,AMT換擋過程中離合器分離與接合之間必然存在運行速度的損失[4-5]。常規的換擋規律制定過程中往往忽略換擋過程車速變化,因此針對AMT重型車輛的換擋規律必須考慮換擋過程中的車速變化。目前利用動態規劃解決車輛控制優化的例子較多,例如利用動態規劃(DP)算法求解混合動力或電動汽車的能量管理策略、換擋控制策略等[6-7],針對重型卡車的綜合性能,利用模型預測控制方法、DP算法的換擋規律優化[8-10]。本文探索了利用道路坡度信息來降低AMT重型車輛在行駛過程中的燃油消耗量和行進耗時的可能性。利用DP求解具有3個狀態變量、兩個決策變量的綜合性能優化問題,以行駛一定路程的運行耗時和所消耗的燃油量的加權和作為目標函數求解出動力性和燃油經濟性綜合性能最優的換擋序列。
1 AMT重型車輛系統建模
該重型車輛配備了大功率柴油發動機,具備6輪全驅功能,主變速器提供了5個擋位,副變速器采用行星齒輪系統提供2個擋區,該AMT共提供9個前進擋位,滿足了其最高設計時速110 km/h和最大爬坡度60%的需求。其傳動系統的結構簡圖如圖1所示,車輛系統相關參數見表1.
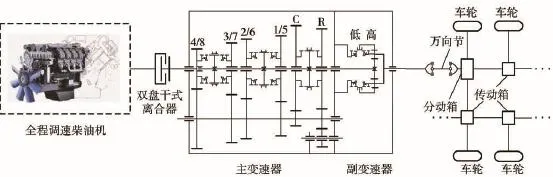
圖1 AMT重型車輛傳動示意圖Fig.1 Transmission diagram of heavy-duty vehicle with AMT
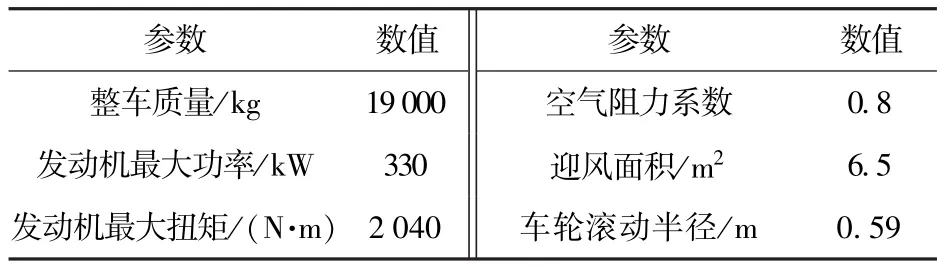
表1 車輛系統參數Tab.1 Vehicle system parameters
根據發動機的測試試驗,獲取了發動機扭矩特性MAP和燃油消耗率曲線。圖2所示為根據該發動機負荷特性繪制的萬有特性曲線。發動機的輸出扭矩如(1)式所示,其具體值則通過查表插值獲得。

式中:Te為發動機扭矩(N·m);ne為發動機轉速(r/min);thro為油門開度(%)。根據萬有特性曲線可以查取不同扭矩和轉速下對應的燃油消耗率,進而求出一段時間內的燃油消耗量,具體見(2)式和(3)式。式中:b為燃油消耗率(g/(kW·h));mt為燃油消耗量(g);[t0,tf]為一段時間間隔。
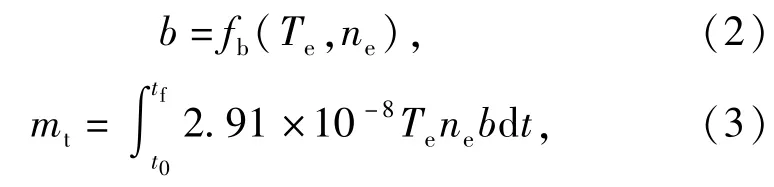
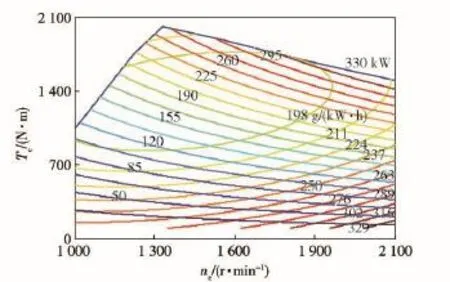
圖2 發動機萬有特性曲線Fig.2 Universal characteristics of engine
針對傳動系統的建模,可將運動部件視為集中質量的剛體,忽略傳動系統中溫度的影響和軸的橫向振動等,根據牛頓第二定理,可得發動機的動力學模型為

式中:Je為發動機至離合器主動部分的轉動慣量(kg·m2);ωe為發動機轉速(rad/s);Tc為離合器傳遞的扭矩(N·m)。AMT在擋運行時,滿足發動機轉速等于變速器輸入軸轉速的條件,若不考慮車輪打滑,則在擋時(5)式~(7)式成立。針對車輛的整車模型,主要考慮車輛行駛過程中外部阻力,各個阻力可表達為
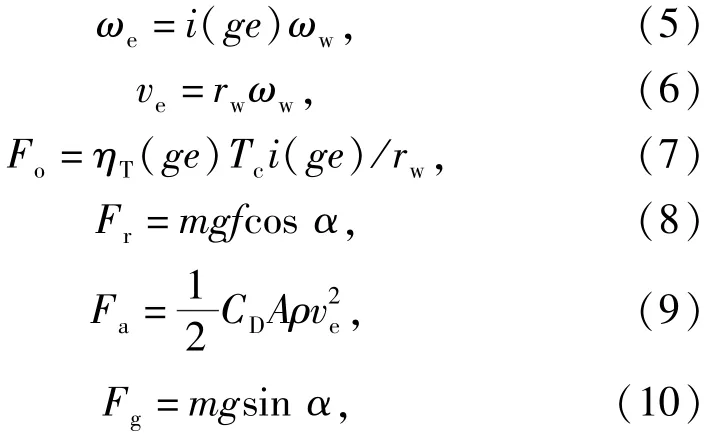
式中:i和ηT分別表示在擋位ge時傳動系統的總傳動比和機械效率;ωw為車輪的轉速(rad/s);ve為車輛運行的速度(m/s);rw為車輪滾動半徑(m);Fo為作用于車輪上的驅動力(N);Fr為滾動阻力(N);m為該車輛總質量(kg);g為重力加速度(m/s2);f為道路滾動阻力系數;α為道路坡度角(rad);Fa為無風時的空氣阻力(N);CD為空氣阻力系數;A為迎風面積(m2);ρ為空氣密度(kg/m3);Fg為坡道阻力(N)。參照車輛運動方程,在不考慮制動的情況下,可得該車輛加速度與驅動力、各個阻力的關系為

式中:a為車輛加速度(m/s2);δ為旋轉質量轉換系數。
2 最優綜合性能換擋序列求解
本文針對已知坡度的道路,利用DP算法求解出AMT重型車輛在一定路程內行駛時平均運行速度和燃油消耗量加權最優的換擋序列。
DP是解決多階段決策問題的一種方法,重型車輛在一定路程L內的綜合性能最優換擋序列的求解,則可以看作求解一系列車速和擋位下,隨著時間變化,換擋指令和油門開度的一系列階段性決策。
2.1 主要概念的確定
針對該優化問題,首先需要確定出模型的階段、狀態變量、決策和策略、狀態轉移、指標函數等。按照空間特征將總路程等分為N個相互離散的階段,每個階段的步長(距離)為h(m),那么有L=N×h.另外,以k作為不同階段的階段變量,k=1,2,…,N.選擇階段k內的運行速度ve、擋位ge和道路坡度α作為相應階段的狀態變量,階段k的一組狀態變量可以表示為sk,如(12)式所示。

根據重型車輛的特點,考慮無制動的縱向控制,選取的決策變量為換擋指令ug和油門開度ut.第k階段決策變量如(13)式所示。

下一個階段的狀態變量sk+1與當前階段狀態變量sk和當前階段決策uk(sk)的關系稱為狀態轉移方程。本優化問題中的狀態變量運行速度ve和擋位ge,其狀態轉移方程參照(14)式、(15)式,其中加速度ak由(11)式計算獲得。道路坡度α由GPS定位和三維地圖共同確定,不考慮其狀態轉移關系。

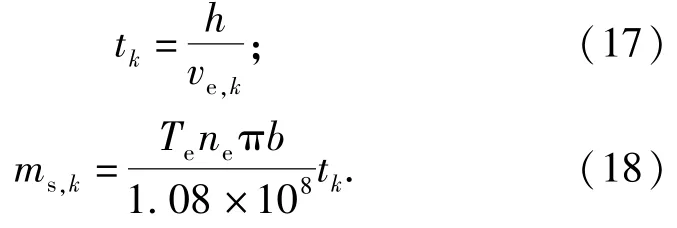
指標函數分為階段指標函數和過程指標函數。在保證重型車輛動力性能的前提下盡可能降低燃油消耗,選用每個階段的運行耗時tk(s)和階段油耗量ms,k(g)的加權和作為階段指標函數,所有階段的指標函數總和作為全局指標函數值[11]。由于運行耗時和階段油耗的數量級水平相同,故選用歸一化加權因子,運行耗時的加權因子選為fβ∈(0,1),則階段油耗量的加權因子為1-fβ,(16)式所示為本優化問題的階段指標函數。

式中:
2.2 變量約束
考慮到該重型車輛的運行環境較為復雜,除了常規的鋪裝道路上運行速度較高外,陡坡爬行等工況下運行速度很緩慢,因此其運行速度ve范圍較廣,其取值范圍可以表示如下:

式中:vmin和vmax分別表示允許的最小和最大運行速度。相應地,不同速度對應于不同的擋位和發動機轉速。本重型車輛配備的發動機怠速為600 r/min,最高空載轉速2 300 r/min,其理想工作轉速在2 100 r/min以下,考慮到DP計算的可行性,將發動機轉速限制如下:

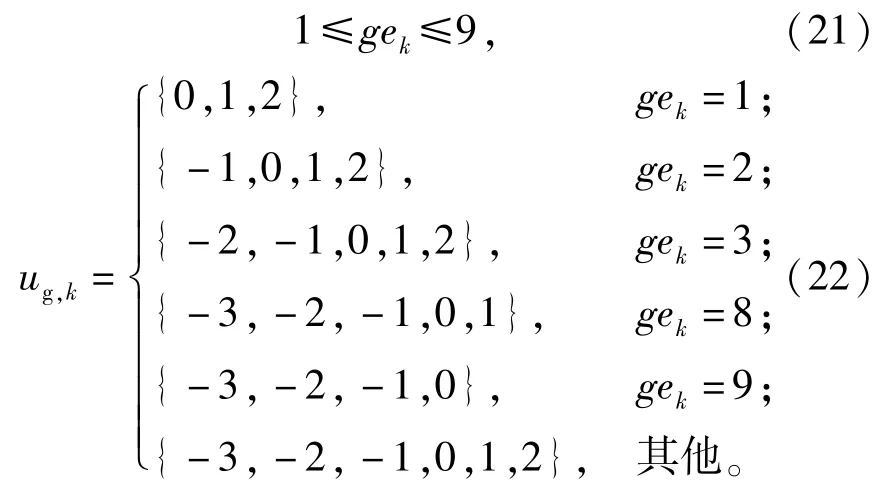
該AMT為9擋有級式變速器,其換擋序列所允許的擋位變化除了順序升降擋外,還需要考慮重型車輛不同載重、極端道路條件下的阻力變化,進而需要跳降擋和跳升擋,本優化問題不考慮制動過程的影響,故設定最多允許跳降3擋,跳升2擋,故擋位ge和換擋指令ug的約束如(21)式、(22)式所示。
為了限制AMT的換擋頻率,保證動力中斷之后速度損失有足夠時間恢復,規定相鄰兩次換擋過程之間時間間隔約為3 s.如果上一個階段換擋指令ug,k-1不為0,且當前階段耗時滿足1.5 s<tk<3.0 s,那么當前階段的換擋指令賦值為ug,k=0.如(23)式所示,利用階段耗時tk對換擋指令ug,k進行約束。

決策變量中的油門開度ut也有一定限制,即0~100%,為了便于建立DP的變量網格,規定每5%為一個間隔,故油門開度ut的約束表示如下:

2.3 優化模型建立及動態規劃算法的實現
根據模型中主要參數的定義和變量約束,可以確定該優化問題的數學模型,(25)式表示優化目標在于求解最優的決策變量序列,使得系統全局的指標函數值J取得最小值。各約束條件參照上文。

本優化問題選用逆序計算方法,從第N階段開始進行計算,根據該階段所有可能的狀態和決策計算所有可能的指標函數值,通過比較確定出最優的階段指標函數值及其對應的狀態變量和決策。隨后,階段號k逐次遞減并搜索當前階段所有狀態變量中滿足狀態轉移關系的特定狀態變量,基于此狀態變量和相應的決策再次計算該階段的最優指標函數,根據狀態轉移關系累加該階段及之后所有階段的最優指標函數值并確定最優的過程指標函數值、狀態軌跡和策略,依此類推直到k=1,從而確定出最優狀態軌跡和最優策略。
2.4 狀態變量預處理及算法改進
2.4.1 變量網格簡化
按照上述流程進行一次全局優化的計算量可能相當巨大,為了提高計算效率,分別對狀態變量和決策變量簡化變量網格。
劃分好階段個數N后,各個階段的道路坡度α就唯一確定了,而運行速度ve和擋位ge是不確定的。根據發動機轉速范圍和不同擋位的總傳動比可以確定出每個擋位下的運行速度范圍,刪除運行速度在該范圍之外的所有取值。圖3為三維的狀態變量示意圖,在每個階段中都包含了擋位和速度的二維組合,即圖中的網格交點,階段k里圓圈表示簡化后的狀態變量網格。
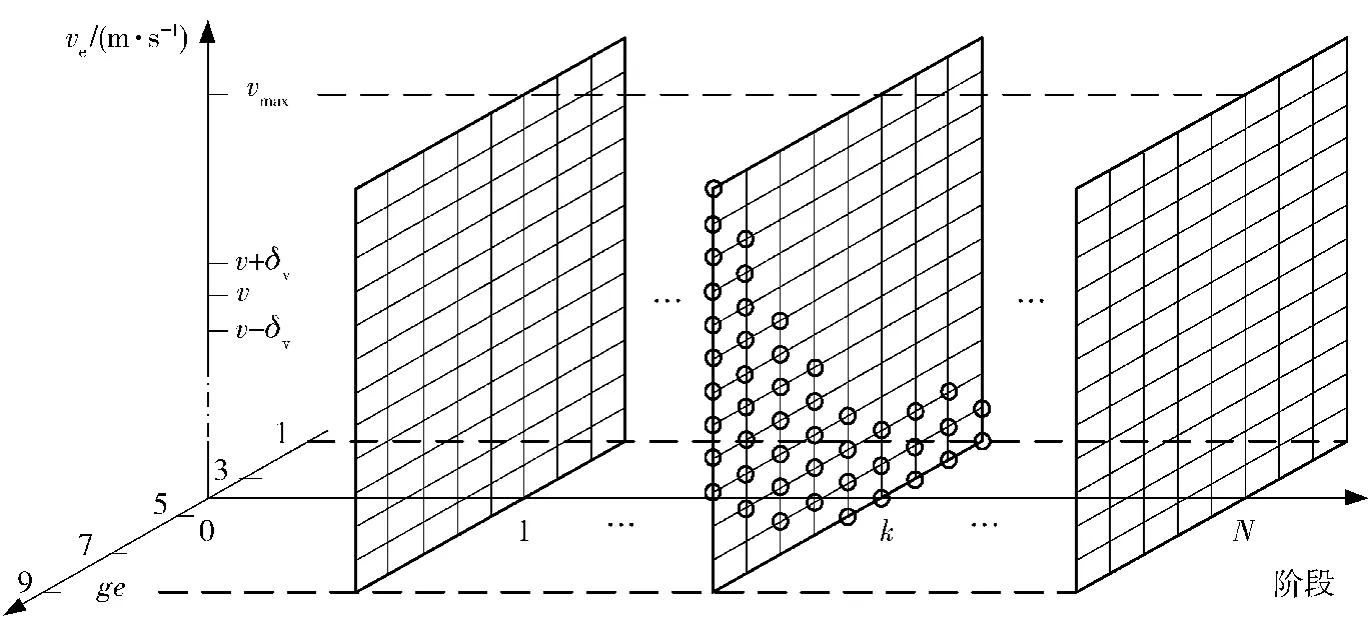
圖3 狀態變量示意圖Fig.3 Grid diagram of state variables
關于決策變量的簡化,油門開度ut是隨機選擇的,不進行簡化;而換擋指令ug的簡化主要依據(22)式和(23)式進行。完成對狀態變量和決策變量的簡化后,全局優化的計算量將會顯著下降。
2.4.2 考慮AMT換擋特性的DP算法改進
本優化問題重點考慮了AMT的換擋特性,即換擋過程中離合器分離與再次接合之間存在動力中斷,在此期間發動機與傳動系統完全分離,重型車輛依靠慣性繼續運行。當車輛在上坡行駛時,換擋必然面臨著運行速度的損失。參照文獻[12-13],在DP算法中相鄰兩個階段如果發生了換擋,即使換擋完成后車輛能提供更大的驅動力,運行速度仍會出現先下降再上升的情況。此時ve的狀態轉移方程不再參照(14)式,而是將該狀態轉移分為兩個部分,動力中斷部分和動力恢復部分。可以簡單地認為動力中斷部分的驅動力完全為0,則在動力中斷時間內車輛僅受到相應阻力的作用。
一般情況下AMT換擋過程的耗時主要與同步器兩端速差、離合器兩端速差相關。根據大量的實際數據統計,該AMT換擋過程耗時一般在0.5~1.6 s之間,為了便于計算,設定動力中斷時間toff= 1.0 s.動力恢復部分是利用剩余的階段耗時進行速度恢復,與在擋運行時狀態轉移方程類似。
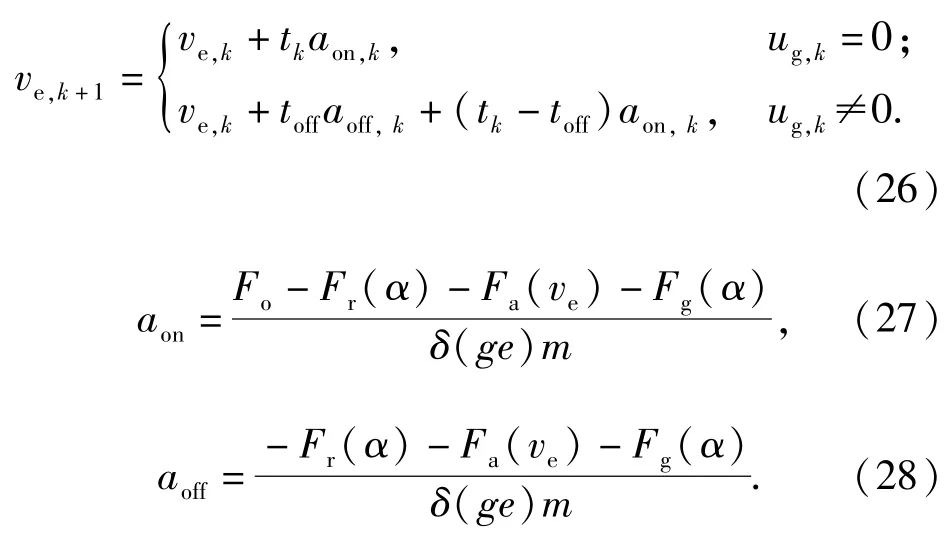
綜上所述,該優化問題中運行速度ve的狀態轉移方程需要根據當前階段的決策換擋指令ug來確定,如(26)式~(28)式所示,ug,k=0時狀態轉移方程與(14)式原理相同;否則分別根據動力中斷期間的加速度aoff和動力恢復期間的加速度aon和時間tk-toff進行計算。需要注意的是,如果tk-toff小于0,說明運行速度較快,此時令toff=tk即可。
另外,除了換擋過程中動力性能的差異,也考慮了換擋過程中的燃油效率。通常的做法是用怠速過程的燃油消耗率代替換擋過程中的燃油消耗率[8],但結合本平臺自身的特性,換擋過程中發動機轉速并未下降至怠速,故動力中斷過程中與在擋過程的燃油消耗量差異忽略不計,均使用在擋時的油耗計算方法。
3 換擋序列優化計算及仿真
3.1 加權因子的取值
根據第2節內容,在Matlab中編寫算法指令并進行調試,除了主函數外,還包含DP計算程序、狀態變量預處理、決策組生成、狀態轉移搜索、指標函數和驗算輸出等子函數。在DP的理論計算中,使用該路段總耗時表征動力性,用全局油耗量表征燃油經濟性,用全局指標函數值表征綜合性能指標,所以運行耗時的加權因子fβ是個很重要的參數,理論上講,fβ與1-fβ之比越小,則DP決策的結果傾向于越好的燃油經濟性,同時動力性越差。但實際計算中,隨著fβ的取值增大,DP決策結果中燃油消耗量的變化并不是絕對正相關的。對此,針對某種道路情況和油門開度,選擇0.001~0.999之間若干個數值進行計算,并分析隨著fβ變化運行耗時與燃油消耗量的變化情況。
為了降低DP全局優化的計算量,選取一段路程1 500 m的小坡度路面進行計算,人為設定重型車輛在該路面上行駛的初始運行速度為13 m/s,初始擋位為7擋,全路段運行速度在13~18 m/s之間,速度離散步長Δv為0.1 m/s,并設定油門開度始終保持在50%.因此,該優化問題是個固定始端的DP,理論計算中使用的參數設置如表2所示,該路段道路坡度隨距離的變化關系如圖4所示。
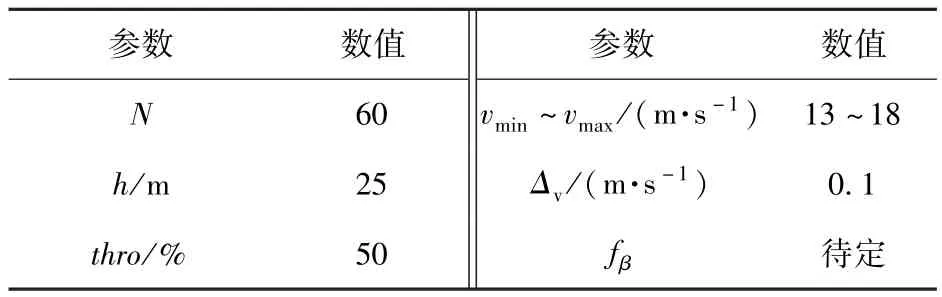
表2 參數設置表Tab.2 Parameters setting table
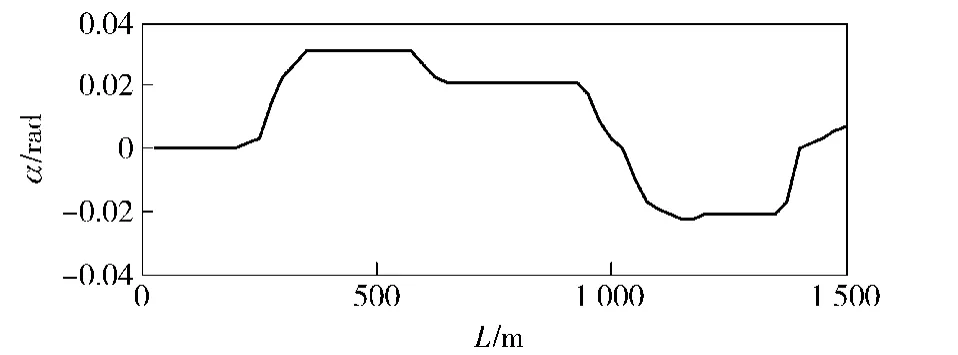
圖4 道路坡度圖Fig.4 Road slope diagram
根據不同fβ取值計算出的換擋序列,統計其全局運行耗時和燃油消耗量,并繪制出性能指標隨著fβ變化而變化的關系曲線,如圖5所示分別給出了運行耗時、燃油消耗量以及fβ和(1-fβ)之比(因子比值)。從圖5可以看出,在當前的道路條件和油門開度下,隨著fβ的增大,運行耗時整體上在減小,而燃油消耗量整體呈增大趨勢。但在一定范圍內,即使fβ取值改變,DP決策結果不變,則動力性和燃油經濟性指標不變。另外,當fβ小于0.77時,燃油消耗量增長幅度較小,而fβ在(0.77,0.91)之間時燃油消耗量小幅度下降;在(0.91,0.975)之間時,運行耗時顯著減小,同時燃油消耗量明顯增大;在(0.975,1)之間時,兩個指標基本穩定,僅有很小幅度的變化。因此,在此油門開度和圖4所示道路條件下,選擇(0.77,0.91)中的一個數作為fβ取值,可獲得更優的綜合性能。
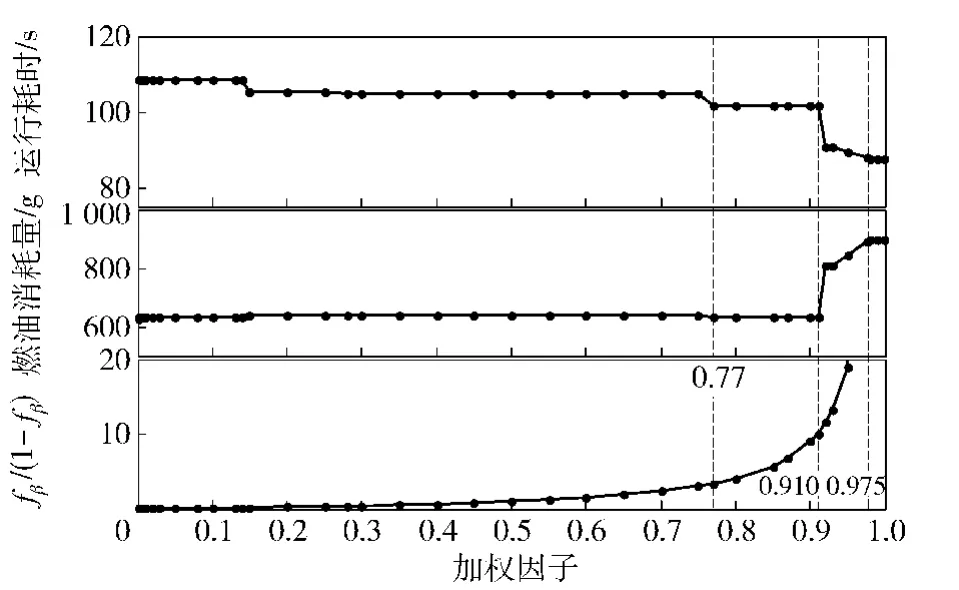
圖5 性能指標變化曲線Fig.5 Curves of performance indicators
3.2 DP決策與原換擋規律的性能對比
為了說明DP理論計算出的決策具有最優的綜合性能,以原有兩參數換擋規律對應的性能作為參照。如圖6所示,原車采用的換擋規律以速度和油門開度作為控制參數,且該兩參數換擋規律已通過出廠實車測試,滿足設計所要求的整車動力性指標。利用模型仿真得到原換擋規律在相同條件下的性能曲線,對比DP決策結果和原換擋規律下仿真結果,即在同一路段內對比車輛運行速度基本一致時的燃油消耗量。部分對比參數設置如表3所示,其中fβ=0.5即根據3.1節所述方法確定得到。
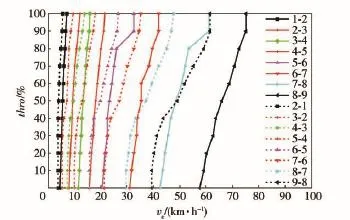
圖6 原換擋規律曲線Fig.6 Original shift schedule curves
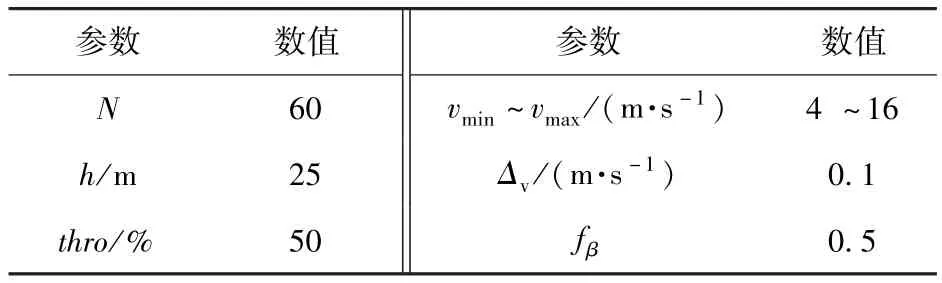
表3 對比參數設置Tab.3 Parameters setting table
50%油門開度下DP決策和原換擋規律的對比曲線如圖7所示,其中實線均為原換擋規律下的曲線,虛線為DP理論計算的結果,對比結果見表4.
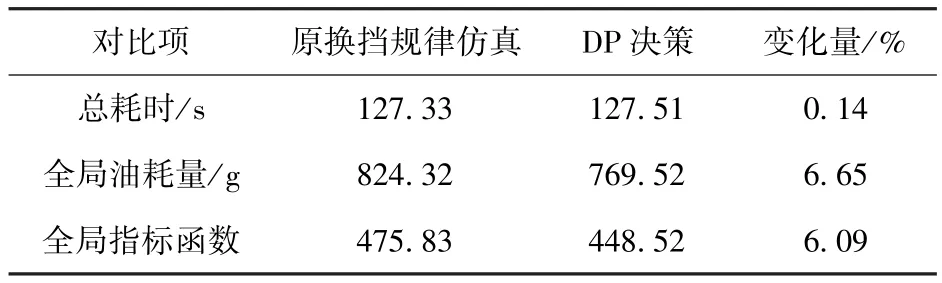
表4 50%油門燃油經濟性對比結果Tab.4 Comparison of fuel economy with 50%throttle
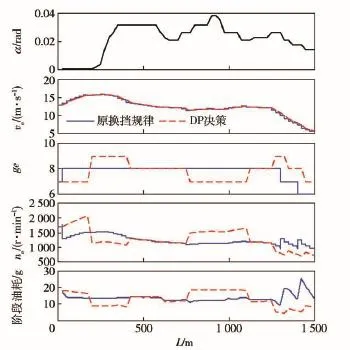
圖7 50%油門DP決策與原換擋規律對比曲線Fig.7 Comparison of DP strategy and original shift schedule with 50%throttle
根據圖7和表4,可知當前的油門開度和道路條件下,全局上看DP決策和原有換擋規律跟蹤同一運行速度時,能夠保證二者具有相同的動力性能,但是DP決策的換擋序列在降速時能夠保持較高擋位進而消耗較少燃油,在動力性能不變差的前提下提升了燃油經濟性,使燃油經濟性和綜合性能得到改善和優化。
綜上可知,調整fβ取值可以獲得最優動力性能或者最優燃油經濟性的換擋序列,通過理論計算,發現fβ與1-fβ之比越大,則DP決策的結果傾向于越好的動力性。經過仿真對比基本相同動力性能下的燃油經濟性指標,表明DP決策在保證動力性能的前提下能夠提升綜合性能。
4 結論
針對AMT重型車輛的換擋規律問題,對重型車輛系統建模和換擋特性分析,利用DP對AMT重型車輛換擋序列進行求解,并將DP決策的結果導入Simulink中進行仿真分析。對比DP決策和原兩參數換擋規律仿真,通過調整運行耗時和燃油消耗量的加權因子可以獲得不同的最優綜合性能換擋序列;仿真結果表明,50%油門開度下,DP確定的最優換擋序列在保證AMT重型車輛動力性能的同時,燃油經濟性提升了6.65%,對AMT重型車輛的縱向控制具有指導意義。
(
)
[1]余志生.汽車理論[M].第5版.北京:機械工業出版社,2009. YU Zhi-sheng.Vehicle theory[M].5th ed.Beijing:China Machine Press,2009.(in Chinese)
[2]陳慧巖,張玉.軍用地面無人平臺技術發展綜述[J].兵工學報,2014,35(10):1696-1706. CHEN Hui-yan,ZHANG Yu.An overview of research on military unmanned ground vehicles[J].Acta Armamentarii,2014,35(10):1696-1706.(in Chinese)
[3]席軍強,丁華榮,陳慧巖.ASCS與AMT的歷史、現狀及其在中國的發展趨勢[J].汽車工程,2002,24(2):89-93. XI Jun-qiang,DING Hua-rong,CHEN Hui-yan.The history and present status of ASCS and AMT and their development trend in China[J].Automotive Engineering,2002,24(2):89-93.(in Chinese)
[4]郭彥穎.重型卡車AMT系統關鍵技術的研究[D].長春:吉林大學,2010. GUO Yan-ying.Research on key technology for AMT system of heavy truck[D].Changchun:Jilin University,2010.(in Chinese)
[5]郝代.重型車AMT換擋過程動力中斷的功率損失特性研究[D].長春:吉林大學,2011. HAO Dai.Research on the power loss characteristics caused by driving force interrupt during shifting process of heavy-duty AMT[D].Changchun:Jilin University,2011.(in Chinese)
[6]Seenumani G,Sun J,Peng H.A hierarchical optimal control strategy for power management of hybrid power systems in all electric ships applications[C]∥49th IEEE Conference on Decision and Control.Atlanta:IEEE,2010:3972-3977.
[7]Xiang Y,Guo L,Gao B.A study on gear shifting schedule for 2-speed electric vehicle using dynamic programming[C]∥25th Chinese Control and Decision Conference.Guiyang:IEEE,2013:3805 -3809.
[8]Hellstr?m E,Ivarsson M,?slund J,et al.Look-ahead control for heavy trucks to minimize trip time and fuel consumption[J].Control Engineering Practice,2009,17(2):245-254.
[9]Hellstr?m E,?slund J,Nielsen L.Design of an efficient algorithm for fuel optimal look-ahead control[J].Control Engineering Practice,2010,18(11):1318-1327.
[10]Ivarsson M,?slund J,Nielsen L.Impacts of AMT gear-shifting on fuel optimal look ahead control,SAE Technical Paper 2010-01-037[R].Pennsylvania:SAE International,2010.
[11]Fu J,Bortolin G.Gear shift optimization for off-road construction vehicles[J].Procedia-Social and Behavioral Sciences,2012,54:989-998.
[12]Ngo V D,Navarrete J A C,Hofman T,et al.Optimal gear shift strategies for fuel economy and driveability[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2013,227(10):1398-1413.
[13]Jacobson B,Spickenreuther M.Gearshift sequence optimisation for vehicles with automated non-power shifting transmissions[J].International Journal of Vehicle Design,2003,32(3):187-207.
Shift Sequence Optimization of Heavy-duty Vehicles with Automated Manual Transmission
LIU Hai-ou,JIN Lei,DONG Shi-jin,MIAO Cheng-sheng
(School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China)
Heavy-duty vehicles have larger space to promote both in dynamic performance and fuel economy. A dynamic model of heavy-duty vehicle equipped with automated manual transmission(AMT)is built based on the analysis of gearshift power interruption.A dynamic programming(DP)method is applied to solve the optimal gearshift sequence in known road condition.The performance comparison between original shift schedule and DP strategy is completed.The simulation results show that the optimal gearshift sequence provides good overall performance,including dynamics and fuel economy,by adjusting the fuel consumption and travel time weighting factor.In addition,the optimal gearshift sequence from DP strategy improves the fuel economy in ensuring the dynamics.
ordnance science and technology;heavy-duty vehicle with automated mannual transmission;dynamic programming;shift sequence optimization;optimal overall performance
U461
A
1000-1093(2015)08-1377-07
10.3969/j.issn.1000-1093.2015.08.001
2014-12-23
武器裝備預先研究項目(3030021221505)
劉海鷗(1975—),女,副教授,碩士生導師。E-mail:bit_lho@bit.edu.cn
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45