電動汽車驅(qū)動控制系統(tǒng)快速控制原型測試平臺研究*
2015-11-18 12:26:02謝博臻朱紹鵬馬浩軍
機(jī)電工程 2015年11期
關(guān)鍵詞:控制策略
林 鼎,謝博臻,朱紹鵬,馬浩軍
(浙江大學(xué) 動力機(jī)械及車輛工程研究所,浙江 杭州 310027)
0 引言
多輪獨立驅(qū)動電動汽車,又稱為分布式驅(qū)動電動汽車,其特點是每個驅(qū)動輪上都裝有輪轂電機(jī)或輪邊電機(jī),通過電機(jī)直接帶動驅(qū)動輪轉(zhuǎn)動。這種驅(qū)動方式增強(qiáng)了車輛各驅(qū)動輪的獨立可控性,同時也省去了許多復(fù)雜的傳動機(jī)構(gòu),提高了傳動效率,節(jié)省了布置空間[1-2]。多輪獨立電驅(qū)動車輛由于各輪驅(qū)動力獨立、精準(zhǔn)、實時可控,具有明顯的整車動力學(xué)優(yōu)勢。但同時,其行車安全性、穩(wěn)定性和動力性依賴于一個穩(wěn)定、可靠、高效的整車驅(qū)動控制系統(tǒng)。這個整車驅(qū)動控制系統(tǒng)包括軟件和硬件,主要負(fù)責(zé)車況、路況、駕駛員意圖等信息的采集、驅(qū)動控制策略的運算、各驅(qū)動輪驅(qū)動力的分配,是多輪獨立電驅(qū)動的核心和基礎(chǔ)。
基于V 模式開發(fā)流程,多輪獨立驅(qū)動電動汽車的驅(qū)動控制系統(tǒng)開發(fā),第一階段是控制策略設(shè)計及離線仿真驗證,第二階段則是快速控制原型(RCP)測試[3]。RCP 測試相比于離線仿真,由于其被控對象是真實的,所以能夠更好的檢驗控制系統(tǒng)的實時性及有效性;而與用真實控制器進(jìn)行控制測試相比,其又有能夠快速修改控制策略、縮短開發(fā)周期等優(yōu)勢[4],目前已經(jīng)廣泛運用在航空航天、汽車、發(fā)動機(jī)和工業(yè)控制等多個領(lǐng)域。
RCP 測試階段中一個很重要的環(huán)節(jié)就是虛擬控制器的建立。國外對于虛擬控制器的研究已經(jīng)較為成熟,其中有代表性的有dSPACE、NI、MathWorks 等公司的設(shè)備,這些設(shè)備具有較高的實時性,能夠進(jìn)行數(shù)據(jù)的快速采集和交換,也能夠?qū)崿F(xiàn)控制策略的快速修改和更新,還能夠與常用的軟件,如Matlab/Simulink和LabVIEW 等實現(xiàn)無縫對接。國內(nèi)方面,由于研究起步較晚,目前大多使用國外公司的這些設(shè)備,在科研領(lǐng)域中進(jìn)行RCP 測試研究。哈爾濱工業(yè)大學(xué)、同濟(jì)大學(xué)、北京理工大學(xué)等都有使用dSPACE和Matlab/Simulink軟件結(jié)合,基于快速控制原型完成相關(guān)控制器開發(fā)的經(jīng)驗[5-7],西北工業(yè)大學(xué)則利用xPC 構(gòu)造了分布式仿真環(huán)境,完成了導(dǎo)彈研制過程中的RCP 測試[8]。
本課題組基于V 模式開發(fā)流程,在之前的研究中已經(jīng)對兩輪獨立驅(qū)動電動汽車的驅(qū)動力分層控制和電子差速控制進(jìn)行了功能設(shè)計及離線仿真,完成了驅(qū)動控制系統(tǒng)開發(fā)的第一階段[9-11]。本研究基于NI CompactRIO 設(shè)計整車驅(qū)動力cRIO 控制器,通過搭建的后輪獨立驅(qū)動電動汽車試驗平臺進(jìn)行驅(qū)動控制系統(tǒng)開發(fā)的第二階段RCP 測試。筆者設(shè)計的驅(qū)動力cRIO 控制器采用模塊化設(shè)計,可快速配置驅(qū)動力分層控制和電子差速等控制策略,為電動汽車驅(qū)動控制系統(tǒng)開發(fā)節(jié)省時間和成本。本研究通過驅(qū)動控制的RCP 測試,驗證所設(shè)計的后輪獨立驅(qū)動電動汽車的動力性及電子差速控制系統(tǒng)的有效性。
1 試驗平臺設(shè)計
1.1 設(shè)計目標(biāo)
根據(jù)國標(biāo)《GBT28382—2012 純電動乘用車技術(shù)條件》以及本課題組前期驅(qū)動控制功能設(shè)計及離線仿真的相關(guān)研究,制定電動汽車試驗平臺的設(shè)計目標(biāo)。
動力性目標(biāo):
(1)驅(qū)動方式為后兩輪輪轂電機(jī)驅(qū)動。
(2)最高車速≥80 km/h,綜合工況續(xù)駛里程≥80 km。
(3)0 km/h~50 km/h 的加速時間≤10 s,50 km/h~80 km/h 的加速時間≤15 s。
(4)通過20%坡度的爬坡車速≥10 km/h。
控制系統(tǒng):
(1)作為整車驅(qū)動力控制系統(tǒng)的試驗平臺,需要能夠?qū)崿F(xiàn)控制策略的快速更改。
(2)控制系統(tǒng)具有通用性,模塊化等特點,方便拆裝。
(3)能夠采集所需的駕駛員指令、車輛行駛狀況和路面狀況等信號。
(4)實時性能好(≤50 ms)。
1.2 整車布置
針對以上設(shè)計目標(biāo),本研究基于某公司量產(chǎn)的一款傳統(tǒng)燃油車,對其動力系統(tǒng)進(jìn)行改造,開展整車布置。
本研究所設(shè)計的后輪獨立電驅(qū)動車輛驅(qū)動系統(tǒng)主要由傳感器、輪轂電機(jī)、控制系統(tǒng)以及動力電池等組成。控制系統(tǒng)主要包括整車驅(qū)動力cRIO 控制器、輪轂電機(jī)驅(qū)動控制器、信號通訊3 部分。
總體結(jié)構(gòu)方案如圖1 所示。
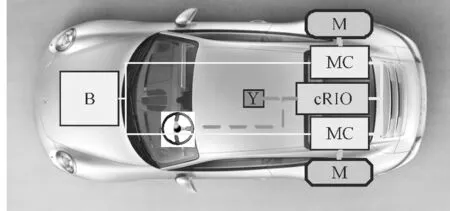
圖1 后輪獨立驅(qū)動電動汽車整車布置方案
考慮到載荷分布和日常維護(hù),本研究將提供動力的動力電池放置于原來車輛放置發(fā)動機(jī)的位置,同時將繼電器保護(hù)系統(tǒng)、慢充、DC/DC和真空助力泵等部件也放置在前動力艙內(nèi)。另外,為了避免電力系統(tǒng)對控制信號的干擾及信號衰減,本研究將整車驅(qū)動力cRIO 控制器和電機(jī)控制器布置在車輛尾部。
設(shè)計的整車試驗平臺如圖2 所示。
整車參數(shù)及相關(guān)的電機(jī)、電池參數(shù)如表1 所示。
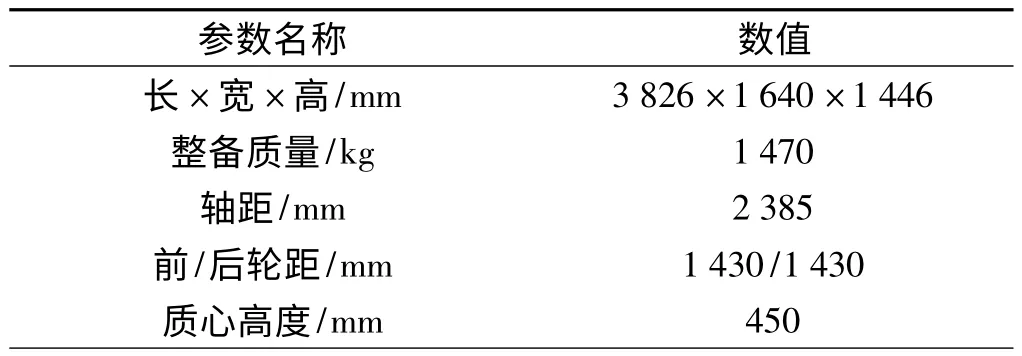
表1 整車及電機(jī)電池參數(shù)
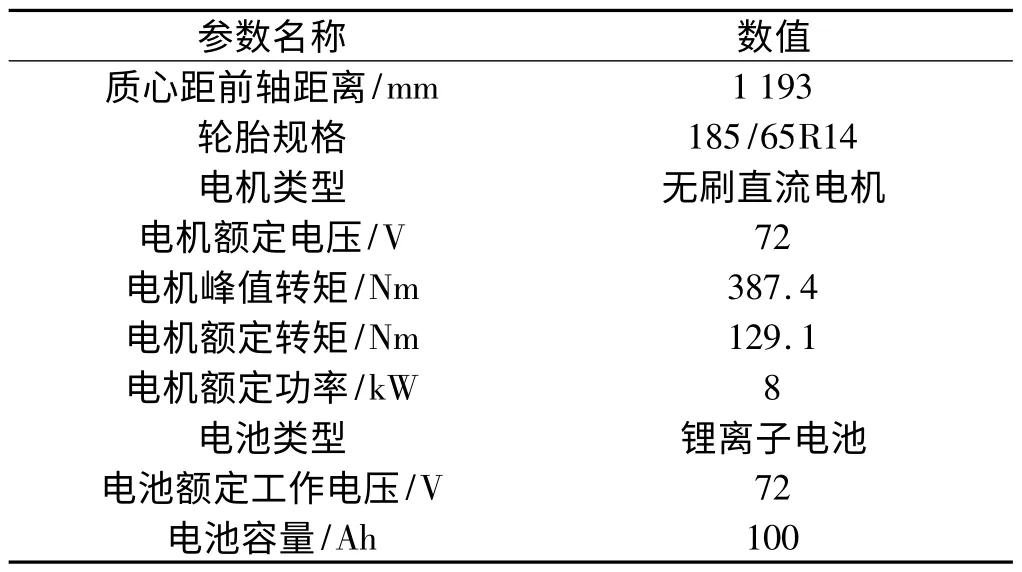
(續(xù)表)
2 整車驅(qū)動力cRIO 控制器
根據(jù)制定的關(guān)于控制系統(tǒng)的設(shè)計目標(biāo),整車驅(qū)動力控制器需要能夠?qū)崿F(xiàn)控制策略的快速更改,因此該試驗平臺選用NI CompactRIO 嵌入式控制系統(tǒng)搭建的整車驅(qū)動力cRIO 控制器。整車驅(qū)動力cRIO 控制器不僅可以實現(xiàn)整車驅(qū)動力控制策略快速重新配置,而且可以選用不同的采集、輸出板卡,以接收和輸出不同形式的信號。
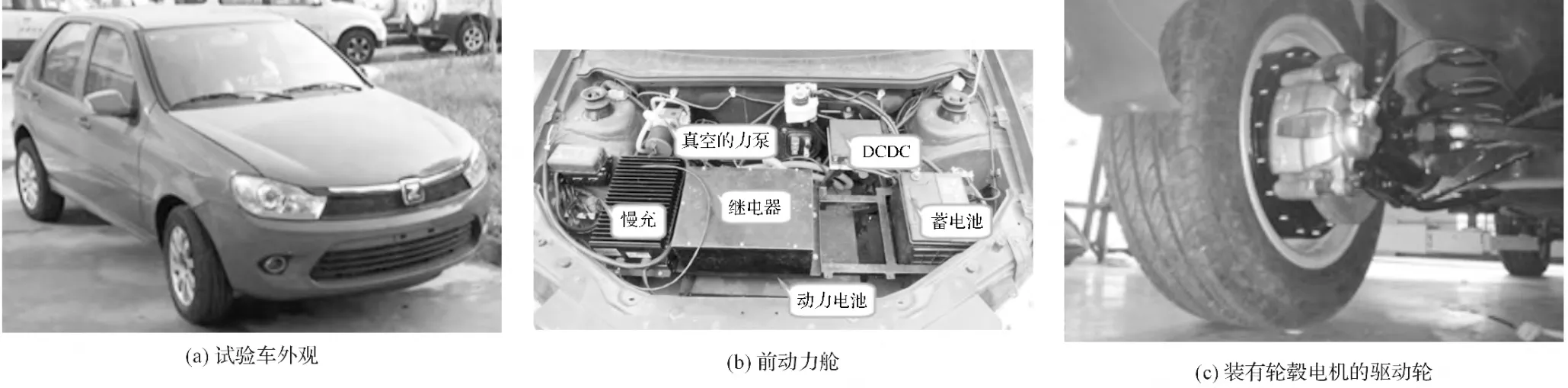
圖2 后輪獨立驅(qū)動電動汽車RCP 試驗平臺
2.1 cRIO 控制器總體結(jié)構(gòu)
整車驅(qū)動力cRIO 控制器的總體結(jié)構(gòu)如圖3 所示,其主要由上位機(jī)、虛擬控制器和被控對象組成。上位機(jī)作為編程和監(jiān)測的主體,可通過其圖形化編程軟件LabVIEW 開發(fā)控制策略、自定義顯示參數(shù),實現(xiàn)對前期程序的有效編寫和調(diào)試。cRIO 控制器包含F(xiàn)PGA整車驅(qū)動力cRIO 控制器的總體結(jié)構(gòu)如圖3 所示,其主要由上位機(jī)、虛擬控制器和被控對象組成。上位機(jī)作為編程和監(jiān)測的主體,可通過其圖形化編程軟件Lab-VIEW 開發(fā)控制策略、自定義顯示參數(shù),實現(xiàn)對前期程序的有效編寫和調(diào)試。cRIO 控制器包含F(xiàn)PGA 模塊和實時系統(tǒng)。其中,F(xiàn)PGA 模塊作為快速采集功能模塊,可連接不同的板卡,采集駕駛員意圖、車況、路況等信號,輸出電機(jī)目標(biāo)轉(zhuǎn)矩、運行狀態(tài)指令等信號。實時系統(tǒng)通過FIFO 或變量實現(xiàn)與FPGA 的數(shù)據(jù)交換,而與上位機(jī)的數(shù)據(jù)交換則通過網(wǎng)絡(luò)TCP/IP 協(xié)議實現(xiàn)。實時系統(tǒng)作為控制策略的載體,可運行實時性較高、運算較復(fù)雜的控制程序。
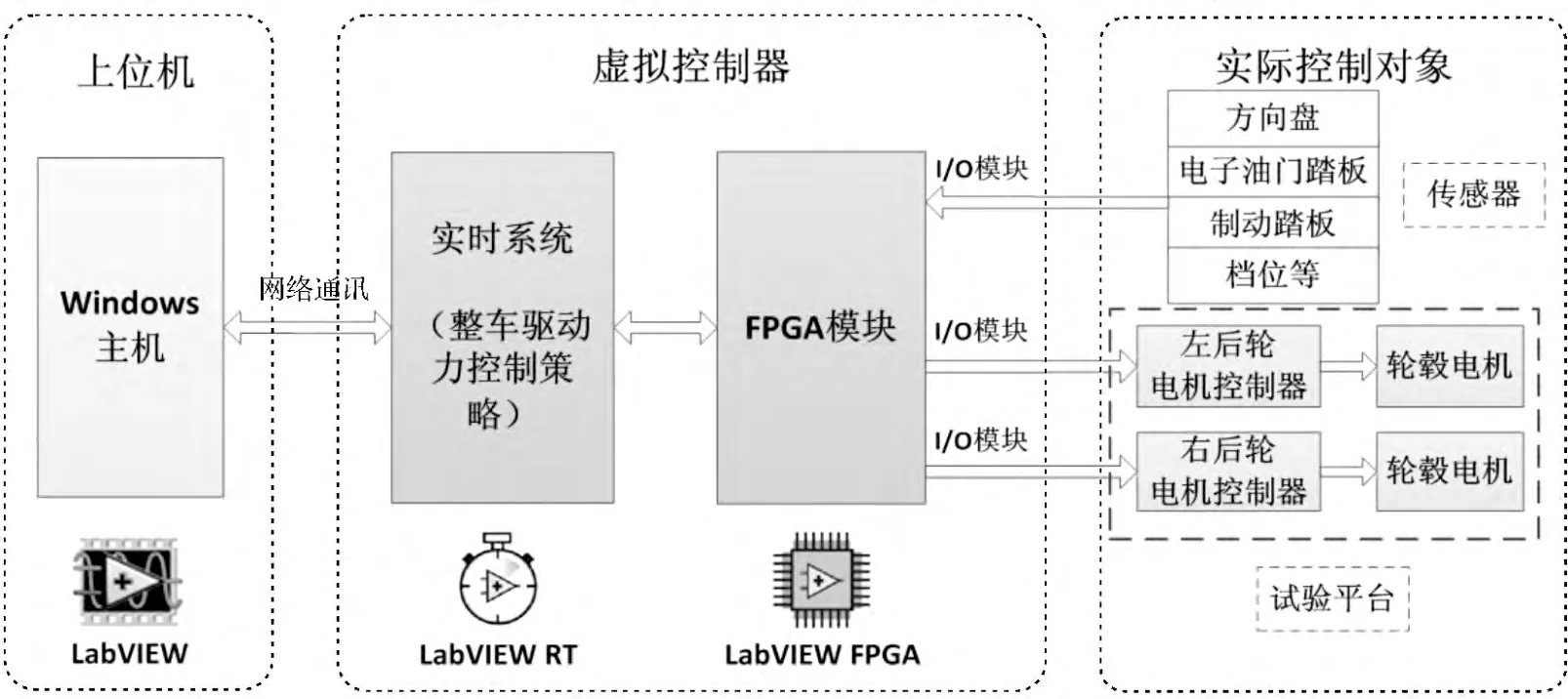
圖3 整車驅(qū)動力cRIO 控制器總體結(jié)構(gòu)
2.2 cRIO 控制器硬件選型
整車驅(qū)動力cRIO 控制器負(fù)責(zé)接收、處理駕駛員指令、車況、路況信號及驅(qū)動力控制策略的運算,制定各輪目標(biāo)驅(qū)動轉(zhuǎn)矩,并通過通訊協(xié)議向輪轂電機(jī)控制器發(fā)送轉(zhuǎn)矩、運行狀態(tài)、模式等控制指令。cRIO 控制器接收的信號包括油門踏板、方向盤轉(zhuǎn)角、車速、驅(qū)動輪轉(zhuǎn)矩、車輛X 向和Y 向加速度、橫擺角速度等信號。cRIO 控制器接收的各信號形式及選擇的I/O 板卡型號,整車驅(qū)動力cRIO 控制器接口定義及板卡選型如表2 所示;輸出的信號包括目標(biāo)轉(zhuǎn)矩信號、正/反轉(zhuǎn)控制信號、使能控制信號等,輸出量及其相應(yīng)的功能說明如表3 所示。
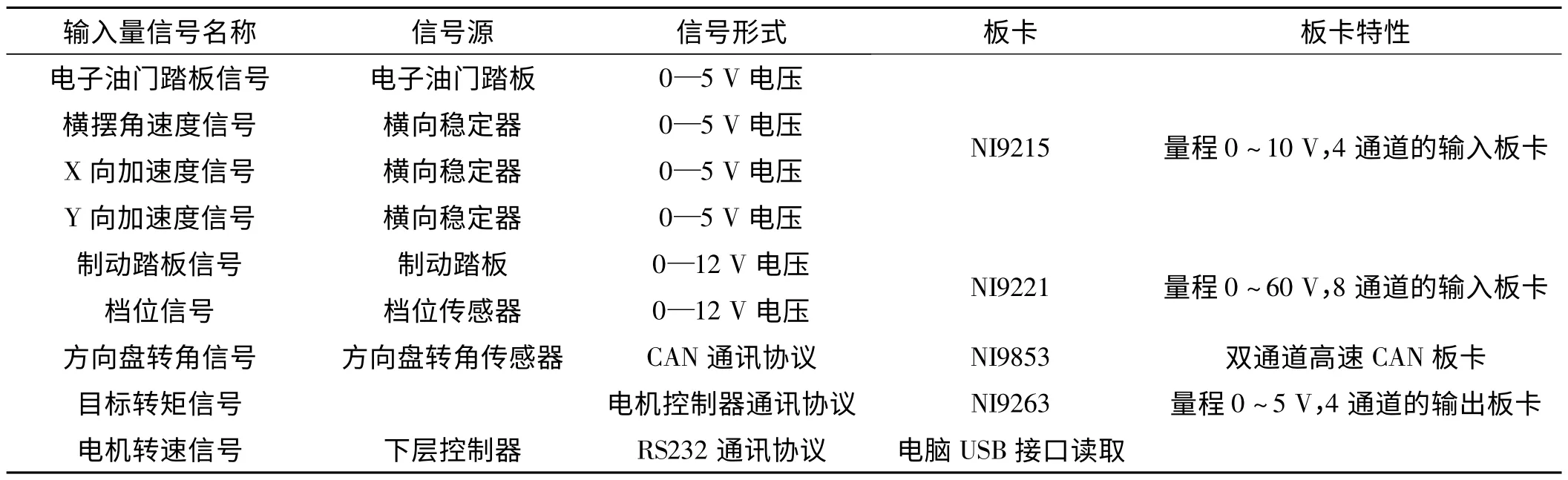
表2 整車驅(qū)動力cRIO 控制器接口定義及板卡選型
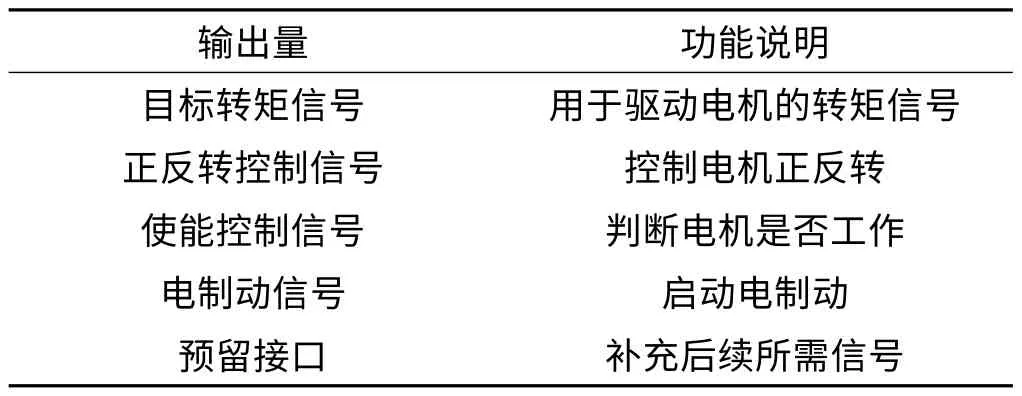
表3 整車驅(qū)動力cRIO 控制器輸出量
由于cRIO 控制器I/O接口具有可配置性,需要相應(yīng)的電機(jī)控制器通訊協(xié)議才可使cRIO 控制器和電機(jī)控制器相匹配。在選擇好對應(yīng)的板卡后,本研究將板卡嵌入到NI-CRIO 9023 的FPGA 面板中,并根據(jù)通訊協(xié)議采用對應(yīng)的線束將傳感器與板卡進(jìn)行連接,完成整車驅(qū)動力cRIO 控制器的硬件部分搭建。
2.3 cRIO 控制器軟件結(jié)構(gòu)
整車驅(qū)動力cRIO 控制器的軟件部分在上位機(jī)中采用LabVIEW 編寫,主要包括上位機(jī)監(jiān)測控制模塊、FPGA 數(shù)據(jù)采集輸出模塊、FIFO 模塊、控制策略模塊、儲存模塊和容錯保護(hù)模塊等。
本研究所搭建的上位機(jī)監(jiān)測控制模塊如圖4 所示,對方向盤轉(zhuǎn)角、檔位信號等駕駛員輸入以及橫擺角速度、X、Y 向加速度等車輛狀態(tài)量都可以實時監(jiān)測;而控制策略的切換只需點擊左、右兩后輪之間的“H/A”切換按鈕,H 代表分層控制策略,A 代表電子差速控制策略。
控制策略模塊是軟件部分中的核心模塊,筆者在該模塊中建立了電子差速控制和整車驅(qū)動力分層控制兩種不同控制策略,通過條件語句來實現(xiàn)兩種不同控制策略的切換和選擇。
本研究在容錯模塊中定義了上電保護(hù)和檔位保護(hù)等,用于防止駕駛員誤操作而引起的危險。
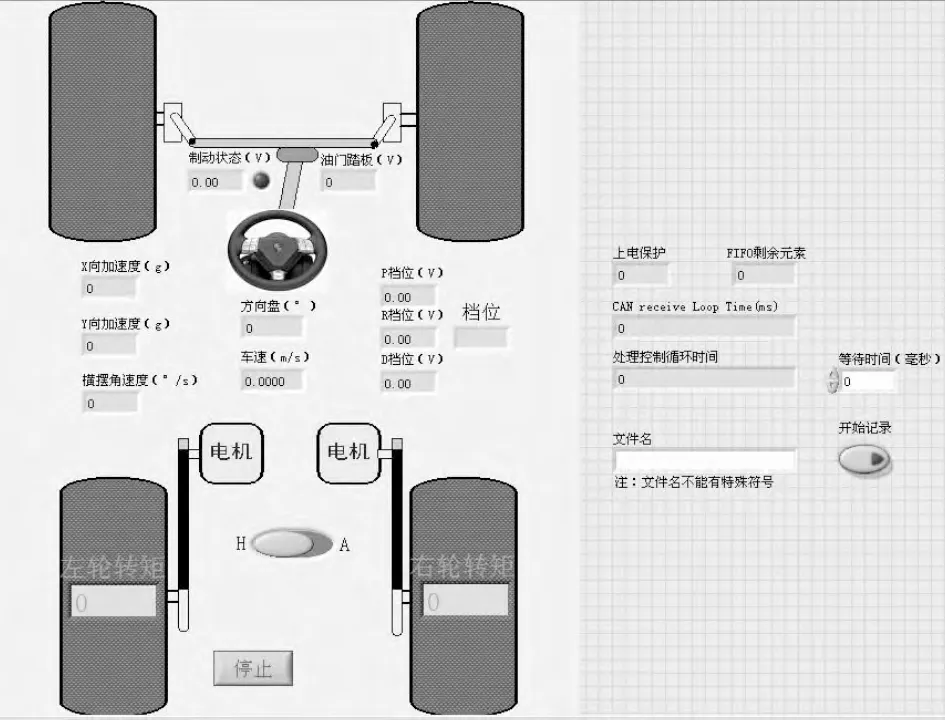
圖4 上位機(jī)監(jiān)測控制模塊
3 試驗驗證
本研究通過裝有整車驅(qū)動力cRIO 控制器的后輪獨立驅(qū)動電動汽車試驗平臺,對車輛動力性及設(shè)計的電子差速控制策略進(jìn)行測試。
試驗場地為路況較好的水泥路面,進(jìn)行直行加速及左轉(zhuǎn)彎試驗。方向盤和油門踏板由駕駛員控制,所以試驗數(shù)據(jù)難免會存在抖動。
3.1 直行加速試驗
直行加速工況的一組試驗結(jié)果如圖5 所示。
從圖5(b)可看出,車輛左右輪從19 s 左右開始輸出轉(zhuǎn)矩,在23s 左右達(dá)到峰值,而后基本保持穩(wěn)定。方向盤雖然稍有抖動,但抖動范圍很小在10°之內(nèi),同時也由于方向盤抖動使得左右驅(qū)動輪的輸出轉(zhuǎn)矩稍有變化。車速從20 s 左右開始增加,到30 s 時達(dá)到最大值50 km/h。車輛10 s 內(nèi)能夠從0 加速到50 km/h,已經(jīng)達(dá)到了1.1 節(jié)設(shè)計的動力性加速目標(biāo)。
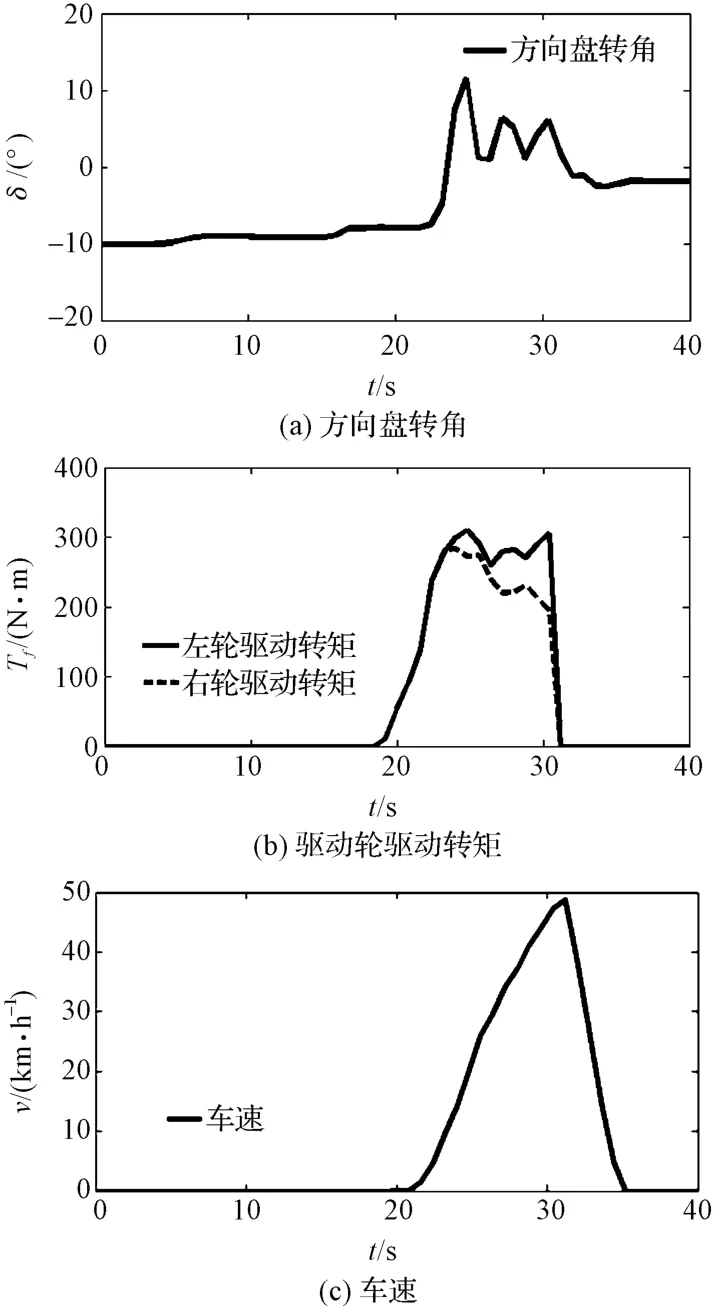
圖5 直行加速試驗
3.2 左轉(zhuǎn)彎試驗
左轉(zhuǎn)彎工況的一組試驗結(jié)果如圖6 所示。從圖6中可看出,車輛在26 s 左右開始進(jìn)入彎道,方向盤轉(zhuǎn)角在36 s 時達(dá)到最大值220°,方向盤轉(zhuǎn)角數(shù)值為負(fù)代表車輛左轉(zhuǎn)。油門踏板在轉(zhuǎn)彎過程中基本保持不變,車速在22 km/h~26 km/h 之間,基本保持勻速。觀察圖6(b)所示的兩驅(qū)動輪驅(qū)動轉(zhuǎn)矩可發(fā)現(xiàn),當(dāng)車輛開始進(jìn)入彎道時,由于是左轉(zhuǎn)彎,左側(cè)驅(qū)動輪轉(zhuǎn)矩由40 N·m 減小為20 N·m,右側(cè)驅(qū)動輪轉(zhuǎn)矩由40 N·m 增大到60 N·m,電子差力效果明顯。彎道結(jié)束時,兩輪驅(qū)動力恢復(fù)相同。
由此可看出,電子差速控制策略在車輛左轉(zhuǎn)時能夠?qū)︱?qū)動輪驅(qū)動力進(jìn)行合理分配。
4 結(jié)束語
基于V 模式開發(fā)流程,本研究建立了電動汽車驅(qū)動控制系統(tǒng)的快速控制原型整車cRIO 控制器,通過后兩輪獨立驅(qū)動電動汽車試驗平臺,進(jìn)行了快速控制原型測試試驗。試驗結(jié)果表明:
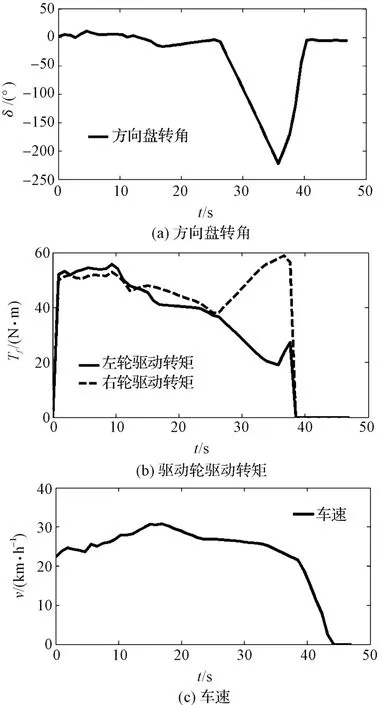
圖6 左轉(zhuǎn)彎試驗
(1)設(shè)計的后兩輪獨立驅(qū)動電動汽車試驗平臺能夠達(dá)到預(yù)期的設(shè)計目標(biāo),動力性能和控制系統(tǒng)均符合要求,且該試驗平臺能夠?qū)φ嚨母黜棓?shù)據(jù)進(jìn)行有效觀測和采集,控制策略能夠?qū)崿F(xiàn)快速修改,平臺具有通用性和可配置性。
(2)設(shè)計的電子差速控制策略能夠在車輛轉(zhuǎn)彎時較好的完成車輛內(nèi)外側(cè)驅(qū)動輪的驅(qū)動力分配,有效提高車輛在轉(zhuǎn)彎時的穩(wěn)定性。
(3)通過快速控制原型測試可以快速優(yōu)化和驗證電動汽車驅(qū)動控制策略,縮短驅(qū)動控制系統(tǒng)的開發(fā)時間及成本。
在今后的研究中,一方面還將繼續(xù)做大量快速控制原型測試試驗,對驅(qū)動控制策略及試驗平臺進(jìn)行優(yōu)化;另一方面將基于V 模式開發(fā)流程,繼續(xù)進(jìn)行電動汽車整車驅(qū)動控制器的“代碼生成及硬件制作”等開發(fā)工作。
[1]HORI Y.Future vehicle driven by electricity and control—research on four-wheel-motored“UOT electric march II”[J].TRANSACTIONS ON INDUSTRIAL ELECTRON ICS,2004,5(51):954-962.
[2]NAM K,F(xiàn)UJIMOTO H,HORI Y.Lateral stability control of in-wheel-motor-driven electric vehicles based [J].TRANSACTIONS ON VEHICULAR TECHNOLOGY,2012,5(61):1972-1985.
[3]丁榮軍.快速控制原型技術(shù)的發(fā)展現(xiàn)狀[J].機(jī)車電傳動,2009(4):1-3,15.
[4]賀 萍,董鑄榮,韓承偉,等.純電動汽車綜合性能試驗臺的國內(nèi)外現(xiàn)狀與改進(jìn)[J].機(jī)電工程,2014(9):1231-1234,1238.
[5]于金泳,劉志遠(yuǎn).基于快速控制原型的ABS 控制器開發(fā)[J].汽車技術(shù),2006(12):20-24.
[6]沈悅明,陳啟軍.dSPACE 快速控制原型在機(jī)器人控制中的應(yīng)用[J].機(jī)器人,2002(6):545-549.
[7]鄒 淵,孫逢春,張承寧.電傳動履帶車輛雙側(cè)驅(qū)動快速控制原型開發(fā)[J].北京理工大學(xué)學(xué)報,2007(1):29-33.
[8]楊向忠,安錦文,崔文革.快速控制原型仿真技術(shù)應(yīng)用[J].航天控制,2009(2):72-75,80.
[9]吳志軍.多輪獨立驅(qū)動電動汽車驅(qū)動控制系統(tǒng)設(shè)計[D].杭州:浙江大學(xué)機(jī)電工程學(xué)院,2014.
[10]邱斌斌,朱紹鵬,馬浩軍,等.電動車輛驅(qū)動控制系統(tǒng)仿真測試平臺設(shè)計[J].浙江大學(xué)學(xué)報:工學(xué)版,2015,49(2):1-6.
[11]朱紹鵬,邱斌斌,吳志軍,等.兩輪獨立驅(qū)動電動汽車的驅(qū)動力控制策略研究[C].2013 中國汽車工程學(xué)會年會論文集,2013:1-11.
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36