風洞層流風場中的WDPSS-8機器人系統的末端位姿偏移及補償
2015-11-19 09:17:02王梓鄭亞青
華僑大學學報(自然科學版) 2015年5期
王梓,鄭亞青
(華僑大學 機電及自動化學院,福建 廈門361021)
近年來,繩牽引并聯支撐系統被廣泛應用于風洞飛行器模型的支撐機構,該支撐系統很適合測量飛行器模型的氣動導數[1].然而,索系結構作為一種典型的柔性結構體系,由于其只能承受拉力,橫向剛度較小,在繩索與風場的耦合作用下會引起繩索的變形,可能導致模型位姿偏離既定值,需要對位姿進行補償.法國航空研究局(ONERA)支持的預研項目SACSO 用九根繩索牽引著模型在立式風洞中進行風洞自由飛行實驗[2-3],該項目研究了繩索對風洞中層流風的影響[4].但尚未見到有關繩索在風洞層流風中的風致變形行為的文獻報道.鄭亞青等[5-6]對WDPSS-8系統應用于飛行器模型靜態測力低速風洞試驗的支撐系統開展了研究,指出該系統可以用于強迫振蕩實驗提取模型的氣動導數.該項目也通過ANSYS軟件對繩索在均勻流速為35m·s-1風速下進行流固耦合行為的研究[7-9],但在建模時忽略了飛行器模型,尚未提到系統末端執行器位姿偏移情況,且尚未見到對系統位姿補償的研究.本文對風洞層流風場中的WDPSS-8機器人系統的末端位姿偏移及補償進行研究.
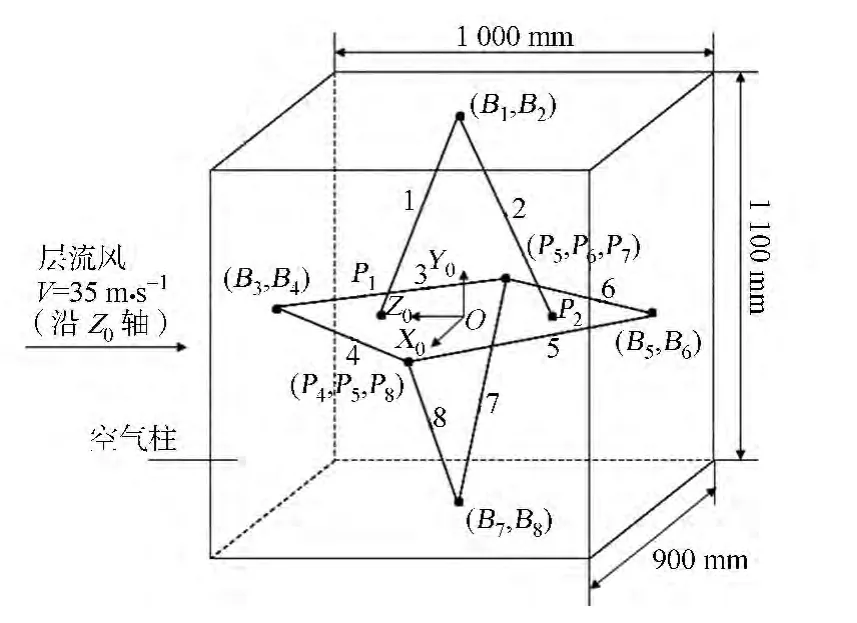
圖1 索系在風洞試驗段中的位置Fig.1 Location of cable system in the test section of a wind tunnel
1 WDPSS-8系統的相關參數
利用WDPSS-8系統對飛行器模型開展一系列靜態實驗,相關參數參照文獻[6].索系在風洞試驗段中的位置,如圖1所示(略去飛行器模型).風洞試驗段空氣柱為長方體,其內部的表面由繩索和飛行器的外表面圍成,風吹方向如左邊箭頭所示,平行于全局坐標系的Z0軸.1~8分別代表第i(i=1,…,8)根直徑為4mm 的繩索.
利用Matlab對系統進行運動學逆解和靜力學分析,為仿真提供繩長和繩拉力參數.飛行器模型由8根繩索牽引置于空氣域,主要由機身和兩側機翼組成,其機身長為270mm,翼展長為285mm,質量為20kg.
設X=[XPXang]T 為飛行器縮比模型的參考點P相對于坐標系OXYZ的位姿.XP為P的位置坐標:(xP,yP,zP)T;Xang為坐標系PxPyPzP相對于坐標系OXYZ的姿態坐標:(φP,φY,φR)T[10].
由于8根繩索在固定坐標系OX0Y0Z0中的空間位置相異,為了討論不同繩索傾角和風向角對索系結構風振耦合響應的影響,引入繩索傾角α、風向角β、索表面點位置角θ,如圖2所示.
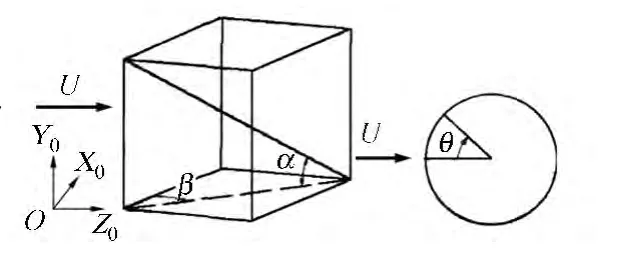
圖2 繩索傾角、風向角及 索表面點位置角Fig.2 Inclination angle of the ropes wind direction angle and position angle of the cable surface points
2 索系流固耦合分析模型的建立
通過ANSYS WORKBENCH 的CFX 平臺對層流風場中的WDPSS-8系統進行流固耦合分析,包括流場網格模型(流體模型)、繩索有限元模型(固體模型)及飛行器模型(因變形小作剛體處理).在流體模型中,風場環境取溫度為25 ℃,密度為1.185kg·m-3,粘性系數為1.831kg·(m·s)-1的不可壓流場,以及平均風速v分別為35,60,100m·s-1的層流風場.
假定繩索為各向同性材料且處于線性彈性范圍內,其彈性模量為0.206TPa,泊松比為0.3,則繩索的彈性極限為0.261TPa,密度為7 000kg·m-3.由于繩索在重力作用下并非一條純直線形式,而是懸鏈線形式.經過計算,0.9m×1.1m 的WDPSS-8系統跨度小,繩索的懸鏈模型與直線模型重合.因此,索長計算時不考慮懸鏈線變化,近似為滑輪與繩索接觸點及飛行器模型與繩索接觸點之間的直線距離;繩索兩端的力要考慮因繩索重力而產生的力矩作用,但因無需考慮繩索因形狀變形而對力矩的影響,繩索可采用直線模型進行建模.對于固體域網格的劃分,由于常用于仿真繩索的Link單元為線單元,不能進行流固耦合分析,故采用體單元進行仿真.但由于體單元為非線性單元,不能設置其特性為只受拉不受壓,預拉力的施加至關重要.根據ANSYS的幫助文件,采用多載荷步的方法對繩索施加預拉力.這里僅考慮耦合分析時,添加的來自驅動系統的外拉力.
對于系統約束的添加,由于動力學模型中柔索與末端執行器之間相互耦合,索端牽引力拖動末端執行器運動,末端執行器的運動又決定了柔索末端節點的位置,必須將飛行器模型建于流固耦合分析模型中,設置為剛體.分析WDPSS-8機構特點,繩索相對于飛行器連接端為球鉸鏈連接,用JOINT-SPHERICAL實現.與絞盤連接一端繩索平動自由度均被約束,只剩轉動自由度,可采用DEMOTE-DISPLACEMENT 約束實現.
3 末端位姿偏移及補償
3.1 動靜力特性分析及位姿偏移
3.1.1 層流風場中索系流固耦合變形分析 基于ANSYS/CFX 在風速v分別為35,60,100m·s-1的層流風場中對WDPSS-8系統進行流固耦合分析,在流固耦合分析的后處理階段,提取索系在吹風前后的最終變形圖.繩索的最終變形主要表現為順風向彎曲(即),其最大變形均發生在上風向繩索中間位置.提取風速為35m·s-1的層流風場中繩索1~8沿繩索長度(D)變化的位移分量(U),如圖3所示.由圖3可知:繩索傾角α較大的繩索,如繩1,2,7,8形變量相對較大,位移分量UZ值較其他兩個分量都大,反映出繩索以順風向彎曲為主;繩索傾角α較小的繩索,如繩3,4,5,6形變量相對于繩長很小,位移分量均趨于0;由于繩索7,8(圖3(g),(h))對稱分布在流場中,雖然形變量相對較大,但兩繩索長度相等且繩索位移分布相似,可推斷其形變量對其共同控制的飛行器模型滾轉角φR 沒變化;位于上風向的繩索1相對下風向的繩索2(圖3(a),(b))形變量較大,且兩繩索長度不等,可能影響其共同控制的飛行器模型俯仰角φP.
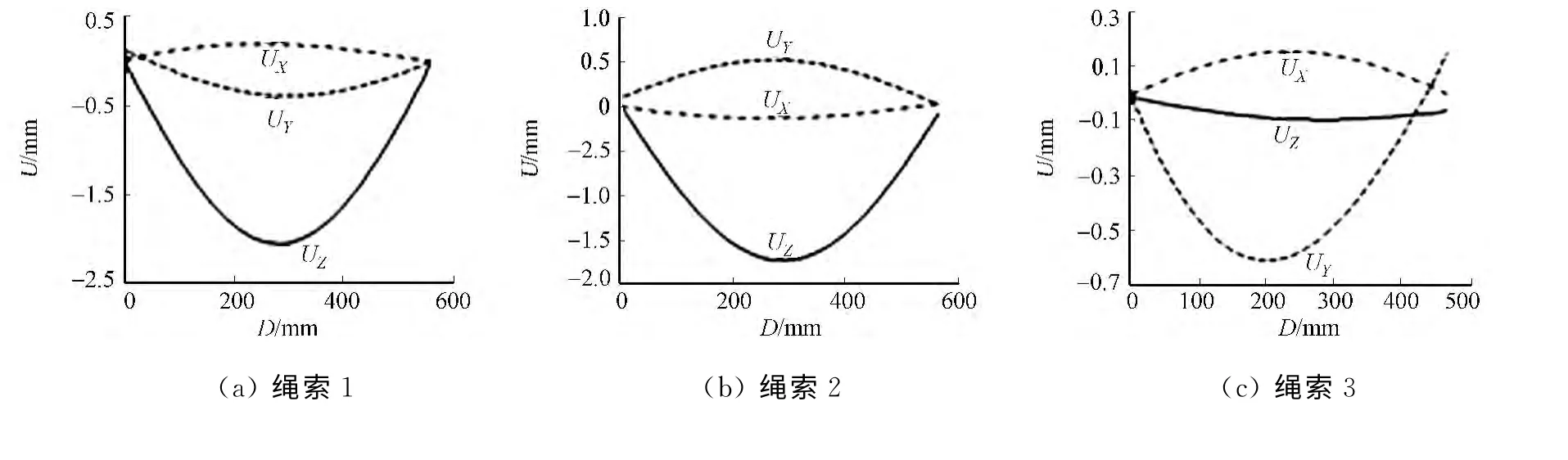
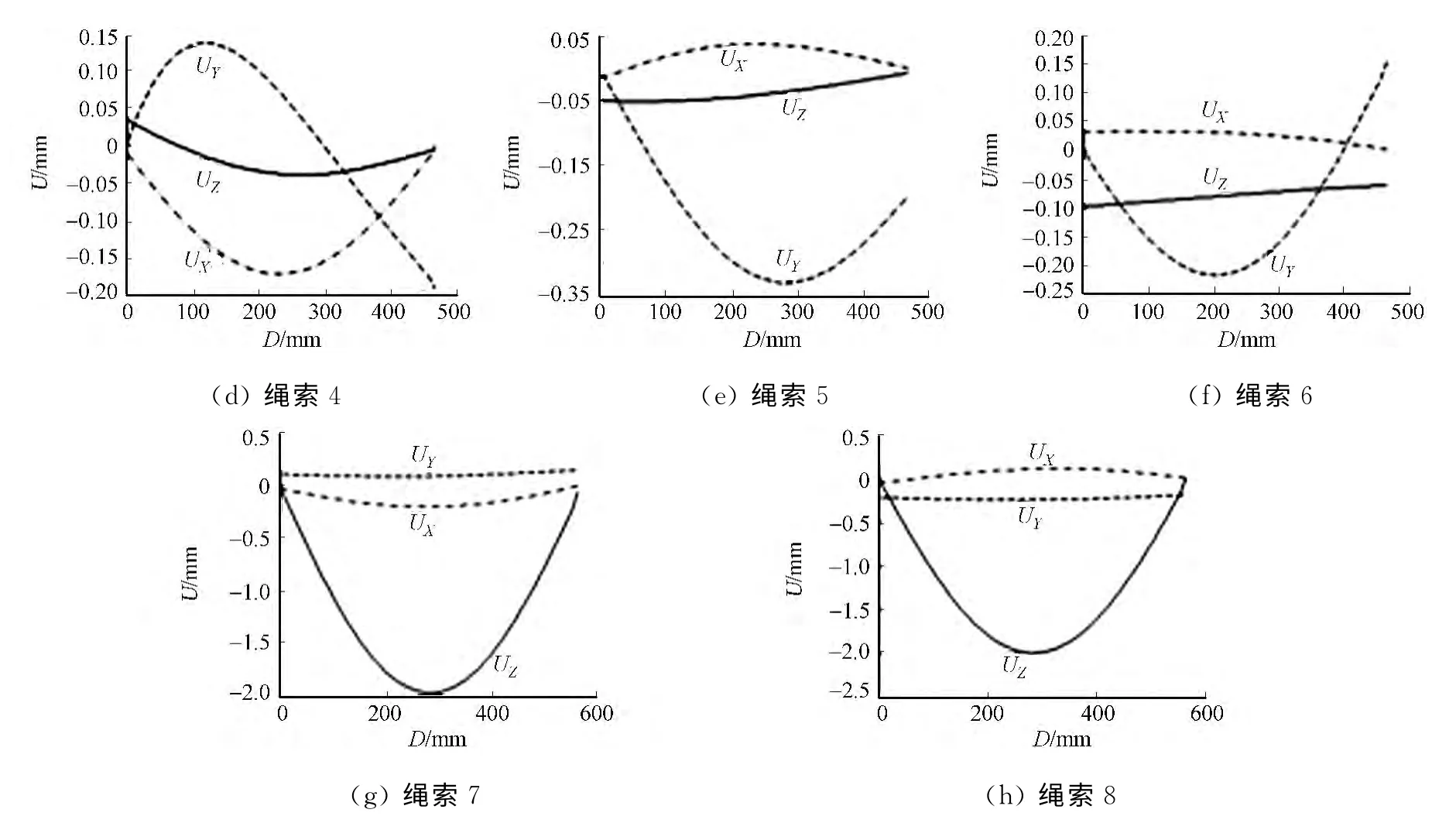
圖3 風速為35m·s-1的層流風場作用下索系沿3個坐標方向的變形圖Fig.3 Deformation figure of the cable system along the 3coordinate directions in the laminar flow field with 35m·s-1
不同風速層流風場中系統吹風前后繩索內力值變化及其方向分量,如表1所示.表1中:T0,T′分別為吹風前的繩拉力和吹風后的末端繩拉力;v為風速.由表1可知:繩索傾角α較大的繩索內力變化量并不大,而繩索傾角α較小的繩索內力變化量較大;隨著風速增加,上風向繩3,4內力增加程度增大,即張得更緊;下風向繩5,6內力減小程度增大,即更加松弛,此現象符合物理意義.
根據吹風后繩索內力各方向分量計算可知:吹風后與飛行器連接端的繩索形狀與吹風前的直線模型有一個夾角,即在層流風作用下,繩索發生順風向彎曲.在35m·s-1層流風場中,此夾角變化范圍較小,為0°~0.5°;在60m·s-1層流風場中,此夾角變化范圍為0.1°~0.8°;在100m·s-1層流風場中,此夾角變化范圍為0.2°~1.8°;彎曲程度最大處發生在繩索傾角α較大的繩索,且繩索7,8彎曲角度一致,繩索傾角α較小的繩索幾乎沒有彎曲.
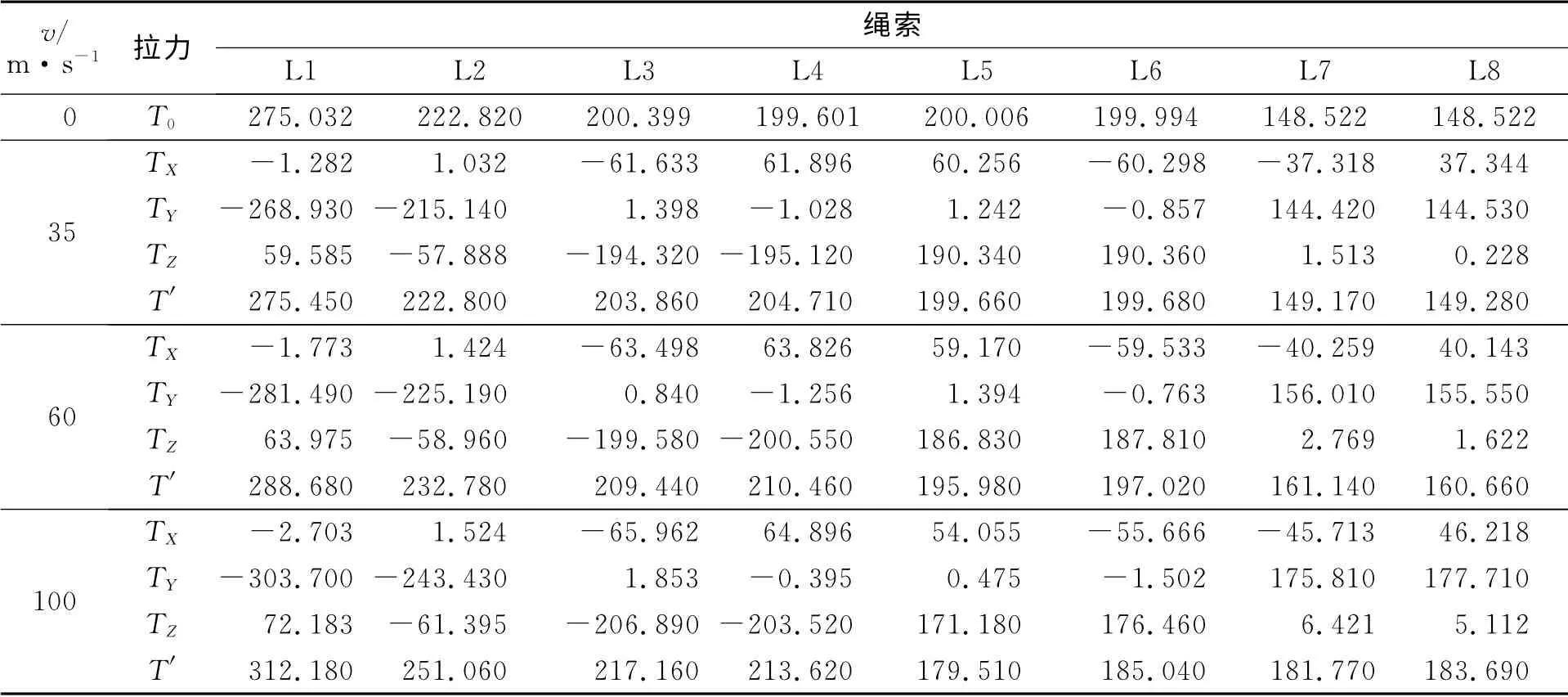
表1 吹風前后繩索內力變化Tab.1 Internal force change of the ropes before and after blowing N
3.1.2 層流風場中的飛行器模型的實際位姿計算 以(xP,yP,zP,φP,φY,φR)表示飛行器模型的坐標系相對于固定坐標系的位姿,當風速為35,60,100m·s-1時,飛行器的實際位姿分別為(0,-0.003,-0.032,0,0,0),(-0.158,-0.262,-0.169,2.1′,0,0.4′),(0.181,-0.655,-0.398,6.6′,0.2′,1.8′).說明在較大風速風場作用下,模型位姿會發生較大的偏移.由圖3繩索變形位移圖可知:這是由于吹風后繩索會發生順風向彎曲,其中,繩索1,2的形變會引起飛行器模型在俯仰角方向的偏離.另外,根據表1可知:吹風后飛行器連接點處繩索方向矢量與吹風前直線模型繩索方向矢量有一個夾角,這將導致吹風后零位姿處模型的結構矩陣JT發生變化.在風速為35m·s-1的層流風場中,吹風后繩索形狀與直線模型幾乎重合,即結構矩陣JT幾乎無變化.因此,根據吹風前系統的零位姿結構矩陣計算得到的繩拉力值可以使飛行器達到既定位姿.在風速分別為60,100m·s-1的層流風場中,吹風后繩索彎曲程度較大以致不能忽略(在100m·s-1層流風場中夾角可達1.8°),導致結構矩陣JT發生變化,尤其是繩索1,2,這反映在吹風后飛行器在俯仰角位姿上產生偏離.
3.2 基于迭代法的WDPSS-8系統末端位姿補償
由于風洞實驗定位精度要求高,對飛行器模型進行逐一定位到期望位姿后再進行吹風實驗,考察俯仰、滾轉和偏航角變化時的飛行器性能,每次變化量為1°,定位精度為2′.根據上文分析結果,可以看出3種不同風速層流風場作用下飛行器位姿確實發生了變化.由于模型中柔索與末端執行器之間相互耦合,8根繩索的變形相互制約,繩索形狀、內力的變化在風速為35m·s-1的層流風場中的綜合作用對飛行器位姿并未產生太大的影響.而在風速分別為60,100m·s-1的層流風場中,其綜合作用不但引起模型順風方向偏移,且在俯仰角位姿上的偏離超出定位精度要求,有必要對吹風后飛行器位姿進行補償.
靜態實驗中繩索所受的拉力,與末端執行器位姿、繩索方向矢量和系統受力情況有關[4].飛行器靜力學方程可描述為

式(1)中:WR為作用在飛行器模型上的力螺旋矢量;JT為機構的結構矩陣,與繩索方向的位置矢量和末端執行器位姿有關;T為繩拉力矢量.對于尚未吹風狀態的飛行器來說,WR=[0,0,mg,0,0,0],m為飛行器模型和內置天平等附件的質量;吹風后,作用在飛行器模型上的力螺旋矢量WR=Wg+Fa,Wg為重力作用在飛行器模型上的力螺旋矢量,Fa為風載荷作用在模型上的力螺旋矢量.
由于飛行器模型最終位姿是重力、繩拉力和風壓等外力綜合作用的結果,而飛行器重力及所受風壓等都是既定的,要使飛行器模型穩定于期望位姿可通過改變繩索拉力來達到.根據式(1)所得的飛行器模型位于零位姿處僅受重力作用下的一組繩拉力T0,在較高速層流風場中并不能使飛行器位姿達到定位要求.然而,根據此組繩拉力作用下系統流固耦合分析的結果,可提取出系統結構矩陣JT′及繩索內力T′,利用式(1)可求解出該風場作用在模型上的力螺旋矢量Fa;再將Fa和零位姿結構矩陣JT0帶入方程,可得到在該風載荷作用下模型要平衡于零位姿處的一組繩拉力T″,相較于僅在重力作用下計算的繩拉力T0更為準確.但由于新的繩拉力T″作用于飛行器上時,吹風后將達到一個新的平衡位姿,以至于風載荷和繩拉力作用在模型上的力螺旋矢量會發生變化,實際上將T″施加于WDPSS-8系統并不能使模型平衡于期望值.因此,需要不斷迭代取得一組最合適的繩拉力值T,使飛行器模型位姿與既定位姿差值在定位精度范圍內.提出的位姿補償方法,如圖4所示.

圖4 WDPSS-8系統中飛行器模型位姿補償方法Fig.4 Pose compensation method of the aircraft model in WDPSS-8system
利用迭代法對平均風速分別為60,100m·s-1的層流風場中的WPDSS-8系統末端位姿進行補償,結果如表2所示.由表2可知:在平均風速為60m·s-1層流風場中,吹風后飛行器位姿X=[-0.158,-0.262,-0.169,2.1,0,0.4],Fa=[-0.499 1,1.227 3,-16.079 1,-0.006 4,0.020 0,-0.052 6],一次迭代后的位姿變化為X=[-0.028,-0.269,-0.049,1.3,0.4,0.8],Fa=[0.062 8,1.240 4,-16.027 2,-0.004 4,0.022 8,-0.055 5];而在平均風速為100m·s-1層流風場中,吹風后飛行器位姿X=[0.181,-0.655,-0.398,6.6,0.2,1.8],Fa=[-3.352 8,2.941 1,-40.452 7,-0.078 1,-0.087 0,0.235 3],一次迭代后的位姿變化為X=[0.169,-0.664,-0.111,4.6,0.2,1.1],Fa=[-3.119 2,2.981 8,-40.488 2,-0.077 5,-0.086 8,0.231 4],二次迭代后位姿變化為X=[0.111,-0.777,-0.091,1.2,0,0],Fa=[-3.145 1,2.981 0,-40.496 8,-0.058 0,-0.083 7,0.303 1].
此外,由表2可知:平均風速為60m·s-1層流風場中的飛行器位姿經一次迭代后可達定位精度要求,而平均風速為100m·s-1層流風場中的飛行器位姿需要經兩次迭代后方可達到定位精度要求.因此,用上述迭代法調整繩索拉力值對系統末端位姿進行補償是可行的.可得出以下結論:1)風速越大,風場對飛行器產生的一個-Z方向的作用力越大;2)當飛行器在風場中的位姿不同時,風載荷作用在飛行器上的力螺旋矢量不同,這是由于流固耦合效應作用的結果.因此,在位姿偏離較大的情況下,不能只通過一次迭代就使位姿達到定位精度.
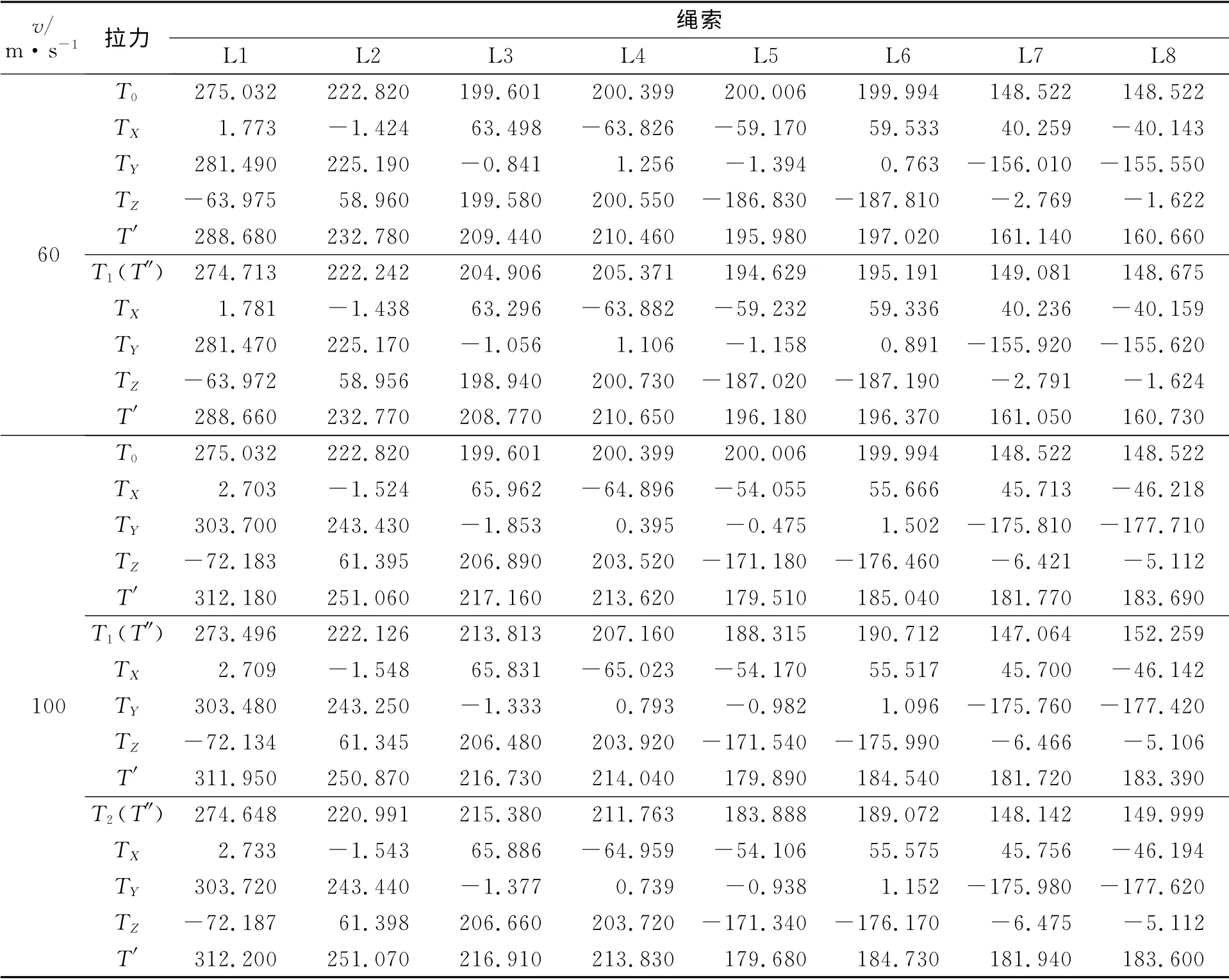
表2 采用迭代法對層流風場中的末端位姿進行補償Tab.2 End-pose compensation of the laminar flow field using the iterative method N
4 結束語
基于ANSYS/CFX 對不同風速層流風場中WDPSS-8系統索系進行流固耦合分析,討論了由于吹風后索的最終變形及繩索繩內力變化而導致的末端位姿偏離.分析得出在較高速的風場中,由于繩索與風場的耦合作用引起繩拉力作用在飛行器模型上的力螺旋矢量發生變化,最終將導致飛行器偏離既定位姿,超過風洞試驗支撐系統定位要求.根據繩索變形情況、繩拉力和風載荷作用在模型上的力螺旋矢量,提出對WDPSS-8系統末端位姿進行補償的方法,從而實現對飛行器模型的精確定位.
[1]LAFOURCADE P,LLIBRE M,REBOULET C.Design of a parallel wire-driven manipulator for wind tunnels[C]∥Proceedings of the Workshop on Fundamental Issues and Future Directions for Parallel Mechanisms and Manipulators.Quebec:[s.n.]:187-194.
[2]FARCY D,LLIBRE M,CARTON P,et al.SACSO:Wire-driven parallel set-up for dynamic tests in wind tunnel-review of principles and advantages for identification of aerodynamic models for flight mechanics[C]∥Proceedings of 8th ONERA-DLR Aerospace Symposium.Beijing:China Machine Press,2004:1878-1882.
[3]鄭亞青,劉雄偉.繩牽引并聯機構的研究概況與發展趨勢[J].中國機械工程,2003,14(9):808-810.
[4]BERGAMANN A.Modern wind tunnel techniques for unsteady testing-development of dynamic test rig[EB/OL].[2014-10-18].http://link.springer.com/contenr/pdf/10.1007%2F978-3-540-95998-4_5.pdf.
[5]XIAO Yang-wen,LIN Qi,ZHENG Ya-qing,et al.Model aerodynamic tests with a wire-driven parallel suspension system in low-speed wind tunnel[J].Chinese Journal of Aeronautics,2010,23(4):393-400.
[6]ZHENG Ya-qing,ZHAO Shuai-he.Research survey of technique about wire-driven parallel suspension systems used in forced oscillation experiments in low-speed wind tunnels for obtaining dynamic derivatives[C]∥Proceedings of 2011 3rd International Asia Conference on Informatics in Control,Automation and Robotics.Berlin:Springer,2011:131-138.
[7]JIAO Shao-ni,ZHENG Ya-qing,LIN Qi.The fluid-solid interaction analysis of WDPSS-8based on ANSYS[C]∥Proceedings of 2011 3rd International Asia Conference on Informatics in Control,Automation and Robotics.Berlin:Springer,2011:795-802.
[8]焦少妮.用于靜態實驗的低速風洞繩牽引支撐系統WDPSS-8索系流固耦合研究[D].廈門:華僑大學,2012:1-93.
[9]鄭亞青,焦少妮,楊永柏.低速風洞層流風場中WDPSS-8機器人系統索系流固耦合效應的動靜力特性分析[J].中國機械工程,2013,24(13):1765-1772.
[10]王宏,郭彥林,任革學.索振動控制及其工程應用[J].工業建筑,2003,33(7):54-56.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19