粉狀物料計量的PID控制
2015-11-20 01:54:48劉坤
中國科技縱橫 2015年16期
劉坤
(南京帝斯曼東方化工有限公司,江蘇南京 210048)
粉狀物料計量的PID控制
劉坤
(南京帝斯曼東方化工有限公司,江蘇南京 210048)
傳統的PID控制也存在許多不足,最突出的一點就是有關PID參數的問題。首先,傳統PID無自適應能力。其次傳統的PID控制器的參數只能整定為滿足生產過程控制目標某一個方面的要求。在設計控制系統的過程中人們主要關心的問題是“設定值跟蹤特性”和“干擾抑制特性”。而傳統的PID控制器,只能通過整定一組PID參數來滿足一個方面的要求。因此常常采用折中的辦法整定控制器參數,這樣得到的控制效果顯然不是最佳的。
PID調節算法 雙環調節 PI調節
下面是通過PLC內置模塊中的帶死區PID調節算法實現煤粉計量系統,提高計量設備的穩定性。
通過的SPU對稱重傳感器提供高精度10VDC電源,經稱重傳感器產生0-20mA壓差信號,毫伏變送器將稱重信號轉換為4-20mA標準電流信號送給PLC進行處理。在系統中皮轉子秤運轉速度由置于電機上的接近開關直接測定,作速度反饋信號送給PLC。在運行中,轉子秤一轉,其運轉繼電器吸合,PLC便將稱重信號進行A/D轉換與預置速度相乘,然后對時間積分,求出物料流量,并將求出的瞬時值與DCS給定值進行比較,再通過PLC里的帶死區的PI調節由變頻器控制的電機的速度,來達到穩定物料的要求
工業生產過程中不可預測的干擾很多。若只有一組固定的參數,要滿足各種負荷或干擾時的控制性能的要求是困難的,因此必須設置多組PID參數。當工況發生變化時,能及時改變PID參數以與其相適應,使過程控制性能最佳。目前使用的有如下幾種形式:
(1)對某些控制回路根據負荷不同,采用幾組不同的Kp,Ti,Td參數,以提高控制質量。
(2)時序控制:按照一定的時間順序采用不同的給定值和Kp, Ti,Td參數。
(3)人工模型:模擬現場操作人員的操作方法,把操作經驗編制成程序,然后由計算機自動改變給定值或Kp,Ti,Td參數。
(4)自尋最優:編制自動尋優程序,一旦工況變化,控制性能變壞,計算機執行自動尋優程序,自動尋找合適的PID參數,保持系統的性能處于良好的狀態。
本系統是一個多變量、多回路的滯后系統,用常規的PID控制很難獲得良好的控制性能。在控制方式上,針對煤粉物料的特性,系統軟件采用了預置控制加前饋自適應PID調節的方式。首先,根據設定流量預置喂料機的轉速,實現初步預給料,再通過設定荷重與檢測荷重的差值來調節喂料機,同時對喂料機的調節加約束條件,保證轉子秤內物料的負荷維持在設定的相應水平,從而實現穩定喂料;通過設定流量與檢測流量的差值來調節轉子秤,從而實現精確計量。
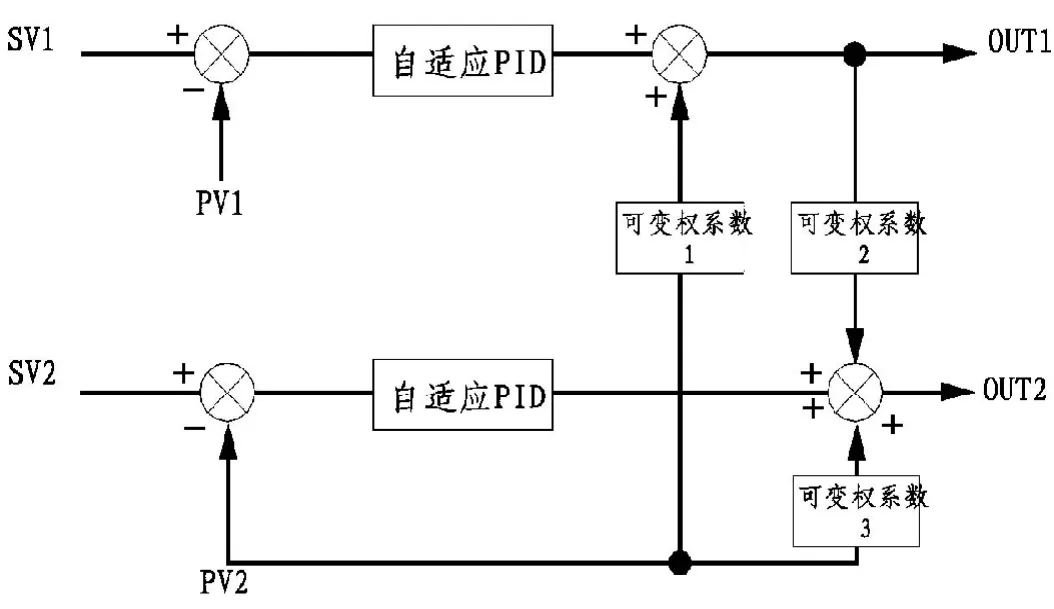
圖1 控制軟件示意圖
上述雙環調節既相互配合又相互影響,為了防止兩環振蕩,軟件上采取了一些特殊的措施,如調節時間的選擇、步長的選擇、PID參數的優化等。在調節時間上選擇外環時間T大于內環時間T的3倍,步長上選擇分段可變步長,pid參數的整定上選擇具有控制參數收斂快,計算工作量相對較小、使用的單純型加速法自適應控制方式,它既能反映動態性能,又能反映穩態特性。

作為性能指標的目標函數,將之離散化可得
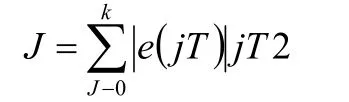
在采樣周期T固定時,T2為常量,上式可簡化為
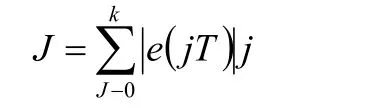
對于本系統,J是極值函數,最優化理論表明:在經過有限步搜索以后能夠找到極值點。
軟件框圖如圖1:

其中流量差值、流量差值變化率及荷重差值變化率決定流量環的自適應PID,荷重差值變化率的引入有抑制系統對于流量環的擾動;荷重差值、荷重差值變化率及轉子秤轉速的變化率決定荷重環的自適應PID,荷重差值變化率及轉子秤轉速的變化率的引入相當于對預給料機加了前饋,從而能有效抑制系統擾動特別是倉內煤粉流態改變導致的下料擾動。
系統控制參數設置:
控制系統中控制參數的設置是系統進行優化調節的基礎,可以保證系統的控制精度和穩定性,在煤粉定量給料控制系統中,主要設置的參數以及作用如下:
流量趨勢:用來觀察流量跟蹤的品質,調節它可使流量跟蹤更穩定。
荷重趨勢:用來觀察轉子秤荷重跟蹤的情況,調節它可使荷重更趨穩定。
內核參數:跟閘門調節有關,當轉子秤荷重偏差大于5Kg時調節。
調節參數:主要是實現流量跟蹤控制過程。
……
……
荷重檢測:檢測顯示秤稱量段上物料量。
掛碼重量:做滿點標定時,所掛砝碼重量。
零點參數:在靜態掛碼標定時,在秤轉空情況下,所檢測到的采樣數據,與標定滿點相對應,一般做完零點標定,需要做滿點標定。
滿點參數:在靜態掛碼標定時,在秤轉空情況下,掛一定量砝碼后檢測到的采樣數據,與零點標定相對應。
皮重參數:在零點與滿點標定做完后,去除所有砝碼及標定桿,確保秤內沒料,開啟皮帶秤后檢測到的采樣數據。
實物標定修正系數:在某一時間段,當秤上的累計量值與實際下料量有偏差,需要改此參數修正。新的系數=(實際下料量/秤上累計量)*以前的系數。
在線動態標定:在倉很準的情況下,停止向倉內進料,在某一時間段,用倉重來標秤過程。使秤上累計與倉物料減少相符。
荷重設定:反映秤上料層厚度。
比例系數:控制過程中的比例放大系數。
積分系數:控制過程中的時間滯后系數。
微分系數:控制過程中的超前調節系數。在皮帶秤秤參數中一般為零。
荷重參數: 當荷重偏差大于5kg時,皮帶秤在調節周期內調節一次,調節幅度為[荷重參數2]*15轉,當荷重偏差大于10kg時,調節幅度為[荷重參數1]*15轉。
流量偏差:表示當|設定值-瞬時流量|>[流量偏差]時,預置閥門開度為[預置系數]*設定產量。
流量參數:當|設定值-瞬時流量|小于[流量參數]時,皮帶秤在[流量延時]時間內不調節,專門調節皮帶秤秤的動態平衡點。同時,閥門在[荷重延時]時間內不調節。以上兩個延時單位為100MS。
喂料機上限差:是從當前預置到調速上限之間的差值。喂料機下限差:是從當前預置到調速下限之間的差值。流量平衡系數:確保FR喂料機的物料RW F轉子秤能夠走掉,不堵料。
[1]白志剛.自動調節系統解析與PID整定.化學工業出版社,2012.
[2]呂劍虹,徐治皋,陳來九.適用于仿真工業控制系統的軟件包[J].中國電機工程學報,1994(02).
[3]貢獻.工業控制系統的發展方向[J].電子儀器儀表用戶,1997(04).
[4]崔少輝,韓國棟.工業控制系統電源自動監控電路的實現[J].機械與電子,1998(02).
[5]肖勇.工業控制系統中串行通信的應用[J].電力機車技術,2002(S1).
