自卸車自動稱重監控系統
2015-11-22 12:08:00邱文貴中聯環有限公司福建廈門361000
中國科技縱橫 2015年23期
關鍵詞:系統
邱文貴(中聯環有限公司,福建廈門 361000)
自卸車自動稱重監控系統
邱文貴
(中聯環有限公司,福建廈門 361000)
自卸車自動稱重監控系統是一套以監控平臺、GPS車載終端模塊、測量舉升油缸的壓力傳感器為核心,運用了現代傳感器技術、自動測量技術、自動控制技術、計算機應用技術以及相關的專用分析和通訊網絡所組成的一個綜合性的在線監控體系。系統具有車輛載重量實時顯示、超載信號顯示、載重量數據報表、車輛行程數據記錄等功能。自卸車自動稱重的監控系統可自動記錄每次載重量,時間、地點、累計載貨次數、超載量、累計超載率等資料。實現及時、準確的監測目標車輛的載重信息,掌握車輛行駛狀況、預警預報控制超載,更好管理車輛的目的。
GPS車載終端 傳感器 監控平臺 自動稱重
1 引言
在傳統車輛自動稱重系統中,通常是采用車廂與大梁四個支點裝稱重模塊或是測量車橋鋼板彈簧變形量或是監測油氣懸掛壓力等方式,傳統的這些方法存在安裝傳感器數量多,成本高,工況惡劣條件下傳感器極易損壞,可靠性差,維護難度大。且一般車輛載重量只能在車載儀表顯示,數據采集難不易于統計及監控車輛難的缺陷。具了解傳統的這些方法,目前一般僅在整車廠試用,沒有得到廣泛的應用。有鑒于此,為了提高系統的整體性、功能性、可靠性和易用性,對自卸車自動稱重系統進行深入的研究。在系統中測量舉升油缸油壓,GPS車載終端采集檢測到的油壓數據經過計算處理后上傳至監控平臺顯示。
2 系統介紹
2.1 系統結構
自動稱重系統中包括油壓傳感器,GPS車載終端,中心監控平臺。
(1)油壓傳感器。壓力傳感器安裝在與車輛頂升機構相連通的液壓閥油缸壓力表連接口,直接測量頂升油缸的液壓油壓力,在誤差允許范圍內通過方程運算間接計算車輛的載重量。油缸壓力最大值為350Bar,正常工作條件下不超出250Bar,故選用壓力量程為300Bar的壓力傳感器。
(2)GPS車載終端。GPS車載終端設備是一款集定位、控制、數據采集、A/D輸入、開入量輸入的GPS設備。其本身具備了2路10位精度,0~3V輸入的模擬量和預留了模擬量一次函數(Y=aX+b)標定方程,可以直接輸入壓力變送器的輸出電壓,并通過標定參數轉化為車輛重量數據,進而傳輸至中心主站系統,為用戶提供車輛的載重數據。車載終端連接超載報警指示燈用于提醒駕駛員車輛是否有超載。
(3)監控平臺。監控平臺顯示車輛的載重數據,對采集的載重數據進行計算和統計,匯總生成報表供下載和打印。監控平臺還可以對GPS車載終端發送控制指令,對終端控制程序的升級及參數設置等。當車輛載重量超過設定的超載閾值時,平臺產生報警信息,形成相應的報警記錄,對長時間超載的車輛進行提醒,警告或可對該車輛斷油和斷電。保證車輛的使用安全。
2.2 系統測量原理
自卸車卸載時,其載重量與舉升油缸的油壓相關,通過檢測油缸油壓,對其進行數據分析處理,即可將其轉換成載重量。油壓分析情況如下:
舉升機構至距離約為10~20cm,舉升裝置已經完成舉升加速進入勻速舉升狀態,同時車廂處于相對水平狀態,傾斜角對K(頂升系數)的舉升受力如圖1所示。
載重量:G頂升力:
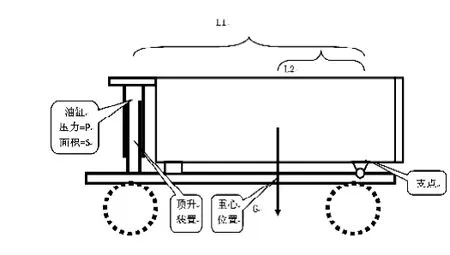
圖1
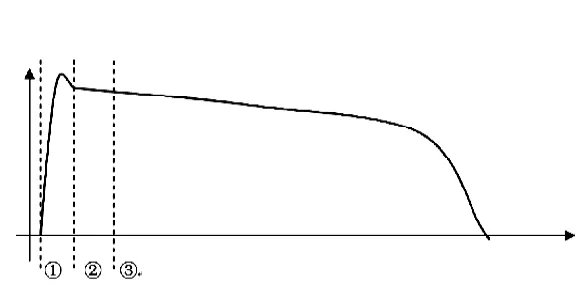
圖2
F=P * S
在起始部分勻速頂升過程有:
F*L2=G*L1
則:G=(F*L2)/L1
=P*(S*L2/L1)
所以:載重G=P*K(頂升系數)K=(S*L2/L1);
頂升過程的壓力曲線如圖2:
①舉升起始加速段。
②勻速舉升起始段。
③舉升后續段。
載重需要測量的是②段的誤差影響不大,此時測量的油缸壓力P值能夠間接的真實反映載重狀態。
設備可以連續測量(采樣速率16點/每秒)油缸的壓力,組成壓力曲線并通過GPS車載終端處理器進行程序分析,比較,計算,進而從曲線中分離出②段曲線,進行加權運算后獲得誤差較小的P值。
2.3 安裝及校準
傳感器可以安裝在液壓舉升系統的液壓閥預留的壓力表位置,同一車型安裝后需要進行一次載重實測校準,以確定這個車型的舉升系數K。
校準過程可以使用主站系統的傳感器標定程序以確定舉升系數K。
2.4 數據傳輸
GPS車載終端處理器在運行過程中連續測量油缸的壓力,在油缸壓力超過10Bar(可定義)時開始啟動監測過程,測量完成并分離出②段曲線(約0.5S)后根據設定的舉升系數 K進行計算載重量并存儲到GPS設備中,同時加上時間標記和地點標記發回主站系統,由主站系統進行記錄。
2.5 誤差分析
測量誤差:傳感器本身的測量誤差。
模型誤差:②段曲線數學分離誤差。
裝載平衡:由于裝載與標準數學模型不一致的中心偏離誤差,這個是系統的主要誤差。
3 結語
本系統可應用、安裝于自卸車,其具有機構簡單,安裝方便,成本低,且在惡劣的工況條件下運行可靠。監測到的車輛載重量通過GPS車載終端傳送至中心監控平臺,能夠實現實時監測車輛的載重量情況,并對車輛載重數據、運行數據進行分析,準確及時捕捉預警信號并及時進行匯報,提醒駕駛員是否有超載信息。系統具有很強的實用性,能夠及時反饋車輛的的運行狀況,及時有效控制車輛超載,對駕駛員安全駕駛,對自卸車整車制造廠、車隊,對車輛的管理具有舉足輕重的作用。
[1]胡健.《單片機原理及接口技術》[M].北京:機械工業出版社.
[2]李華.《現代移動通信技術GPRS系統》[J].廣州:華南理工大學出版社.
[3]王祖德.《我國專用汽車分品種發展分析》[J].專用汽車.
[4]張玉蓮.《液壓和氣壓傳動與控制》[M].浙江大學出版社.
[5]白文亭.汽車自動化迎來集成化時代 [J].電氣時代,2009年09期.
[6]施昌彥.動態稱重測力技術的現狀和發展方向[J].計量學報,2001.3.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32