基于遺傳算法的海洋地震拖纜避險工況陣列控制研究
2015-11-22 05:30:38張維競
海洋工程 2015年1期
李 揚,張維競
(上海交通大學 海洋工程國家重點實驗室,上海 200240)
隨著中國經濟持續快速發展,工業化、城鎮化進程加快,居民消費結構升級換代,能源需求不斷增長,在今后一段時期,能源消費彈性系數難以大幅降低[1]。在陸地資源日漸枯竭的情況下,海洋能源逐漸成為社會的熱點與焦點,海洋地震勘探技術是勘探海洋能源的重要環節[2]。隨著勘探技術的不斷發展,海上石油勘探逐漸朝著精、廣的方向進步。要求在進行地質參數采集時覆蓋更廣的勘探區域,減少巡航的次數,這樣就可以在相同條件下采集更廣區域的地質參數。要達到覆蓋區域廣的目的,即要求負責數據采集和傳輸的拖纜的數目更多、長度更長,目前國內實際應用中一般為4 條拖纜,每條拖纜長度為6 000 m,要求逐漸向8條以及16 條拖纜,每條纜長12 000 m 的方向發展[3-4]。這就對拖纜的精確控制,提出了更高的要求。
在目前對海洋地震拖纜控制器的研究中,美國的Oyvind Hillesund 在2007年發明了一種帶有水翼的拖纜控制器,該控制器可以接收上位機控制指令,并根據命令控制水翼角度變化,實現對拖纜的位置控制[5]。張維競、段磊等改進了之前的控制器,發明了一種新型轉動型拖纜位置控制器,可驅動轉動體繞本體轉動,水翼跟隨轉動體繞本體轉動,這樣就實現了對拖纜的垂直和水平控制[6-8]。在拖纜控制系統的研究中,史斌杰等改進了傳統PID 調節器,建立了基于人工神經元PID 調節器與基于傳統PID 控制方式的仿真程序,對在深度方向上受到干擾的情況下,水鳥的深度位置變化情況進行仿真[9]。苗建明等建立了較為詳細的數學模型和傳遞函數模型,在MATLAB 利用Simulink 對該系統進行了仿真分析[10]。劉濤、張亮等對拖纜的動力學性能做了分析,包括低應力拖纜瞬態動力學分析、復模態振動主動控制研究等[11-13]。吳喆瑩等首次將串級控制引入拖纜控制系統,從理論上提出一套控制策略[14]。
在現有的研究成果中,拖纜系統的組成與結構研究已經較為完備,但在拖纜控制方面,大部分集中于微觀層面“水鳥”小位移振動控制研究,主要通過“下位機”來完成。然而,在實際中,有多種工況需要“上位機”指揮幾個甚至十幾個“水鳥”共同完成,這時就要求上位機能系統的考慮所有相關水鳥的狀態,在保證完成任務的前提下,以最快的速度尋找最優化的控制策略,向各個發出控制指令,這類控制往往有多維輸入和輸出,控制要求復雜,利用常規控制策略往往難以實施。本文即選取一種避險工況進行研究,建立基于遺傳算法的控制策略,并進行遺傳算法計算的關鍵步驟——適應度函數的計算,提出該種工況適應度函數的一般性公式。
1 海洋地震拖纜系統與工作過程
海洋地震拖纜系統由物探船、拖纜、尾標等結構組成。為了實現三維海洋地震勘測,物探船大約以5 節速度拖曳,拖纜通常有幾千米長,并含有大量的傳感器和相關電子設備,沿其長度方向分布。由震源產生的信號直接穿過海水進入海底,反射后,由傳感器接收到的反射信號,然后被發送到的地震勘測船。經過分析得出海底礦藏的精確位置[15]。
拖纜上每隔一段距離有一個拖纜控制器,控制器有兩翼,稱為“水鳥”。水鳥可通過調整兩翼攻角產生升力或轉矩,從而達到調節拖纜位置的目的。
拖纜的控制為一個串級控制,每個水鳥自身有一個簡單的控制器,同時每個水鳥又受到物探船中上位機的控制。上位機根據需要,可以向任意水鳥發出位置(深度、橫向位移)指令,水鳥自身控制器負責對上位機指令的具體執行,具體過程如圖1 所示。
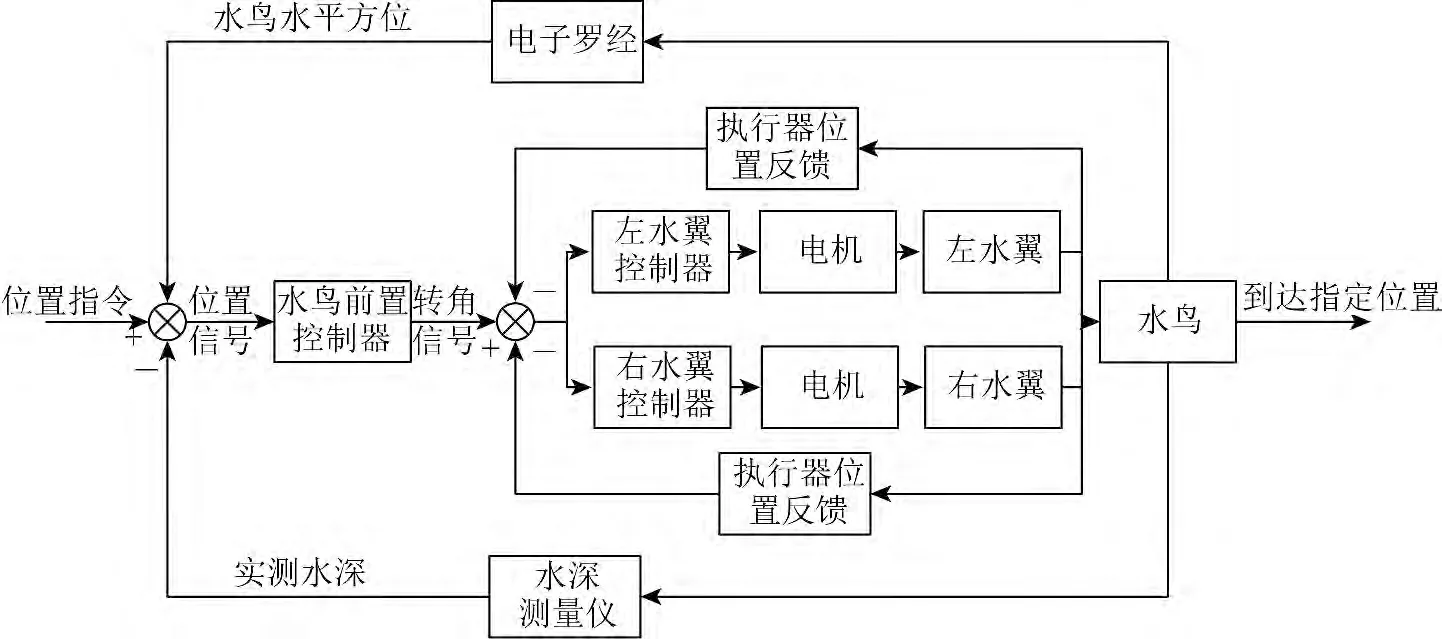
圖1 串級控制系統結構圖Fig.1 Structure of cascade control system
海洋地震拖纜系統的導航定位方法中,豎直方向的定位較為簡單,目前對于水深傳感器的研究相對成熟,較為常見的是基于壓力傳感器的動態深度測量裝置[16]。對于水平位移,往往難以測量,可利用Lyapunov函數方法利用線性變系數雙曲方程描述拖纜系統,控制規律僅僅包括速度和斜率,并不需要難以測量的水平位移,較為容易實施[17]。
2 常見避險工況及處理方法
2.1 工況介紹
物探船、拖纜以及尾標的總跨度長達幾百甚至上千米,物探船在行駛過程中,將會不可避免的遇到各類風險,就需要及時、準確的調整拖纜陣列來規避風險。
假設物探船以5 節速度勻速行駛,其后只有一條拖纜,拖纜上共有4 個水鳥,由前至后編號依次為1 ~4號,最后有一尾標,5 段拖纜長度均為L' ,這時有一浮體正靠近拖纜,很可能與拖纜相撞,造成拖纜破壞。這時就需要上位機迅速做出反應,對水鳥發出指令,調整拖纜陣列,規避該物體,如圖2 所示。

圖2 某避險工況示意Fig.2 Schematic diagram of an emergency condition
上位機經過測算,物體將在X0位置與拖纜發生碰撞,此位置與1 ~4 號水鳥的距離分別為X1~X4,浮體的吃水深度為Y0,水鳥的初始工作深度為Y'i,設1 ~4 號水鳥下潛到的深度為Y1~Y4,水鳥移動后,5 段拖纜的長度分別為L1~L4,如圖3 所示。
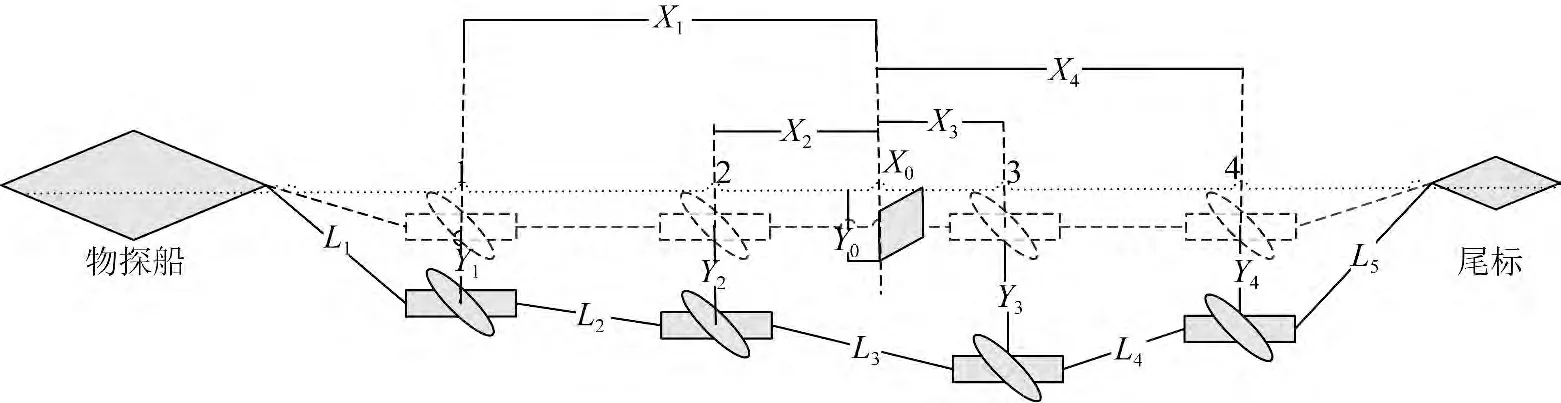
圖3 拖纜移動示意Fig.3 Schematic diagram of the movement of streamer
要達到既定目標,只要保證X0位置處拖纜的深度Y'0大于Y0,那么4 個水鳥有很多種下潛方案,即Y1~Y4有多種組合。但在實際中,要考慮兩個重要問題:一個是工作時間,另一個是拖纜承受的張力。工作時間由Y 決定,而拖纜張力由L 決定。所以,控制系統需要滿足一個最優化條件,即均取得最小值,二者的平衡關系通過一個參數λ 來控制,上位機可根據情況緊急程度,在拖纜可承受張力的范圍內,對參數進行修改。
那么,控制系統的結構如圖4 所示。輸入為X1~X4,Y0;輸出為Y1~Y4,同時作為圖1 的輸入信號。
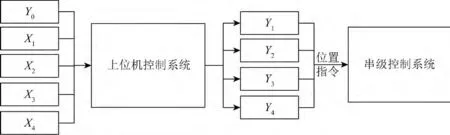
圖4 控制系統結構圖Fig.4 Structure of the control system
2.2 遺傳算法處理與計算
在處理類似第2.1 節中的最優化問題時,遺傳算法發揮著重要作用。遺傳算法是一種仿生學算法,它擅長處理非常復雜的非線性多輸入問題,求解的關鍵在于找到合適的適應度函數[18]。在本問題中,有兩個最優化目標,即L 和Y。選取參數λ 來控制二者所占權重。Y 和L 的處理較為簡單,目標是得到,同時為了保證Y 與L 有相同的數量級,需要對其進行修正,即得到所以適應度函數應為

此外,還有一個約束條件必須加到目標函數中,即最初的控制目標

這里的ξ 為一個安全系數,ξ ≥1 。這時,就需要利用罰函數法進行約束處理,引入懲罰因子。即對在解空間中無對應可行解的個體,在計算其適應度時,處以一個罰函數,從而降低該個體的適應度,使該個體被遺傳到下一代群體中的機會減少。即用下式對個體的適應度進行調整:

式中:F(X)為原適應度,F'(X)為考慮了罰函數之后的新適應度,P(X)為罰函數。
故,新的適應度函數為

式(5)也可以推廣到一般性問題,設拖纜有N 個水鳥,第i 個水鳥的前接拖纜長度為L'i,共有M 個障礙物同時經過,第i 個障礙物的吃水為Yi0(見圖5 所示),則:

式(6)即為該種工況適應度函數的一般性公式。
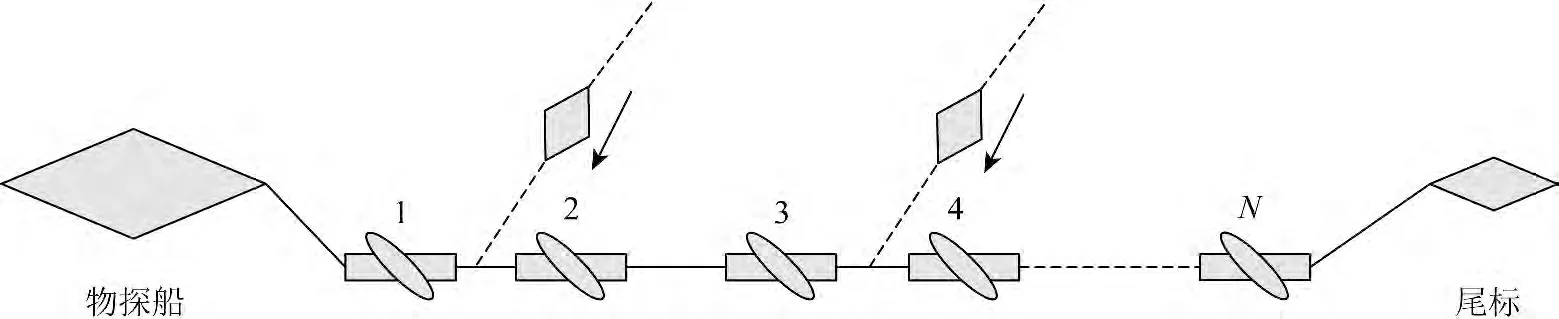
圖5 一般避險工況示意Fig.5 Schematic diagram of general emergency condition
假設某拖纜有4 個水鳥,間隔均為100 m,初始位置為水下10 m,兩個不明物體A、B 靠近拖纜,A、B 吃水深度分別為16 m 和13 m,A 將在2 號水鳥后側70 m 處與拖纜相遇,B 將在3 號后側80 m 處與拖纜相遇。需要控制拖纜,規避兩不明物體。計算如下:

這里,利用MATLAB 遺傳算法與直接搜索工具箱(GADS)進行計算[19-20],GADS 的主要功能是利用遺傳算法,尋找使適應度函數取得相對極小值的變量組合。該工具箱主要優點是操作簡易,不需要對遺傳算法各個算子做詳細設計,一般只需設置好邊界范圍和種群大小,操作關鍵在于適應度函數的設計。

得到輸出的Y 值為即1 號水鳥不移動,2 號水鳥向下移動3.4 m,3 號水鳥向下移動10 m,4 號水鳥向下移動2.5 m。根據得到的結果進行驗證,拖纜與A、B 兩物體相遇處拖纜的深度分別為18.02 m 和14 m,均大于A、B 的吃水深度,可以規避風險。
3 結 語
在拖纜控制過程中,尤其是在拖纜長度和拖纜數量不斷增加的情況下,涉及到的控制器個數會越來越多,尤其在L' 為非定值時,障礙物有多個時,會產生多變量的非線性問題。運用文中提出的方法,可以省去中間復雜的計算過程,只需設置好相關參數和輸入變量,即可直接得到結果,為整個拖纜控制器串級控制系統提供較為精確的控制目標。
在海上各種其他復雜工況中,還會遇到更多類似的問題,牽扯到多個輸入變量和輸出變量,要考慮多個優化目標。而在所有的問題中,滿足安全完成控制任務的前提下,都需要滿足“工作時間最短”和“拖纜承受的張力最小”兩個最優化目標。在以后的研究中,可利用本文提供的方法,確定好其特定的優化目標,得到其他各類避險工況的適應度函數,建立上位機避險工況數據庫,就可以實現對拖纜避險的精確快速控制。
[1]江澤民.對中國能源問題的思考[J].上海交通大學學報,2008,42(3):345-359.(JIANG Zemin.Reflections on energy issues in China[J].Journal of Shanghai Jiao Tong University,Science,2008,42(3):345-359.(in Chinese))
[2]PINDER D.Offshore oil and gas:global resource knowledge and technological change[J].Ocean & Coastal Management,2001,44(9):579-600.
[3]CHENG Jingyuan,SONG Kezhu,WANG Yanfang,et al.Data gathering and transferring sub-system designing of time-lapse marine seismic data acquisition and recording system[J].Journal of Basic Science and Engineering,2006,14(2):181-193.
[4]熊翥.我國物探技術的進步及展望[J].石油地球物理勘探,2004,39(2):237-243.(XIONG Xu.Development and prospect of mine resistivity tomography[J].Progress In Geophysics,2004,39(2):237-243.(in Chinese))
[5]HILLESUND O,BITTLESTON S H.Control system for positioning of marine seismic streamers:U.S.Patent 6,932,017[P].2007-08-23.
[6]張維競,段磊,陳峻,等.轉動型海洋地震拖纜位置控制器:中國,200910312032[P].2010-06-09.(ZHANG Weijing,DUAN Lei,CHEN Jun,et al.Rotating marine seismic streamer position controller:China,200910312032[P].2010-06-09.(in Chinese))
[7]DUAN Lei,ZHANG Weijing,LIU Tao.A new device for controlling the position of marine seismic streamer cables[C]//ASME.2010.
[8]張維競,張小卿,陳峻.基于嵌入式水鳥的海洋地震拖纜運動狀態仿真研究[J].海洋工程,2009,27(4):81-86.(ZHANG Weijing,ZHANG Xiaoqin,CHEN Jun.Simulation study on the movement states of marine seismic streamer based on embedded birds[J].The Ocean Engineering,2009,27(4):81-86.(in Chinese))
[9]史斌杰,張維競,劉濤,等.基于人工神經元PID 調節器的“水鳥”控制系統性能分析[J].武漢理工大學學報,2012(1):62-65.(SHI Binjie,ZHANG Weijing,LIU Tao,et al.Performance analysis of the "Birds" control system based on artificial neural pid controller[J].Journal of Wuhan University of Technology,2012(1):62-65.(in Chinese))
[10]苗建明.海上地震拖纜自動定深器建模及仿真研究[J].自動化博覽,2010(6):72-74.(MIAO Jianming.Modeling and simulation of auto-depth dragging cable controller on offshore seismic[J].Automation Panorama,2010 (6):72-74.(in Chinese))
[11]LIU Tao,ZHANG Weijing,MA Jie,et al.Transient dynamic analysis of towed low-tension cable with experimental verification[J].Ship Mechanics,2013,17(3).
[12]張亮,張維競,劉濤.地震拖纜的復模態振動主動控制[J].海洋工程,2013,31(1):49-53.(ZHANG Liang,ZHANG Weijing,LIU Tao.Active complex mode control of seismic cables'vibration[J].The Ocean Engineering,2013,31(1):49-53.(in Chinese))
[13]張亮,張維競,劉濤.海洋資源勘探拖纜水平振動的魯棒自適應控制[J].振動與沖擊,2013,32(14):134-138.(ZHANG Liang,ZHANG Weijing,LIU Tao.Robust adaptive control strategy for the horizontal vibration of towed seismic cables[J].Journal of Vibration and Shock,2013,32(14):134-138.(in Chinese))
[14]吳喆瑩,李揚,江龍克,等.新型海洋勘探拖纜位置控制器的設計研究[C]//第八屆軍事海洋戰略與發展論壇.2011.(WU Zheying,LI Yang,JIANG Longke,et al.Design and study of a new type of marine exploration towing position controller[C]//The Eighth Military Strategy and Development Forum.2011.(in Chinese))
[15]PABON J,TEIGEN O.Marine seismic streamers:U.S.Patent Application 13/004,419[P].2011-01-11.
[16]李日東,鞠文斌,皮桂英.動態海浪、水深綜合壓力傳感器的研究[J].今日科苑,2010 (10):21-21.(LI Ridong,JU Wenbin,PI Guiying.Research on dynamic waves,water depth integrated pressure sensor[J].Modern Science,2010 (10):21-21.(in Chinese))
[17]劉濤,張維競,馬捷.基于Lyapunov 函數方法的海洋資源勘探拖纜水平振動的控制[J].上海交通大學學報,2010,44(10):1460-1464.(LIU Tao,ZHANG Weijing,MA Jie.Control strategy for horizontal vibration of towed seismic cables via lyapunov method[J].Journal of Shanghai Jiao Tong University,2010,44(10):1460-1464.(in Chinese))
[18]周明,孫樹棟.遺傳算法原理及應用[M].北京:國防工業出版社,1999.(ZHOU Ming,SUN Shudong.Genetic algorithms:theory and applications[M].Beijing:National Defense Industry Press,1999.(in Chinese))
[19]李揚,張維競.基于MATLAB 遺傳算法工具箱的水鳥水翼控制研究[J].信息技術,2013 (5):24-27.(LI Yang,ZHANG Weijing.Study on the control of embedded bird's wings based on GA toolbox of MATLAB[J].Information Technology,2013 (5):24-27.(in Chinese))
[20]雷英杰,張善文,李續武.MATLAB 遺傳算法工具箱及應用[M].西安:西安電子科技大學出版社,2005.(LEI Yingjie,ZHANG Shanwen,LI Xuwu.MATLAB genetic algorithm toolbox and its application[M].Xi’an:The Press of Xidian University,2005.(in Chinese))