沖擊荷載作用下新型延展式張力腿平臺時域分析
2015-11-22 05:31:28黃維平
海洋工程 2015年1期
關鍵詞:結構
鞏 超,黃維平
(中國海洋大學 工程學院,山東 青島 266100)
隨著海岸和淺海海域油氣資源的枯竭,海洋油氣開采逐步向深水甚至超深水進軍[1],因此在海洋工程行業中需要不斷研發新型海洋結構來適應更加嚴酷的海洋條件。張力腿平臺(TLP)是一種垂直系泊的半順應半剛度式平臺,由甲板、主體和錨泊系統三部分組成,錨泊系統是由垂直張力腿組成,使平臺與海底相連,從而限制垂蕩運動,從而能夠在平臺上使用干采油樹[2]。張力腿平臺垂蕩運動的固有周期一般為2 ~4 s,縱橫蕩運動的固有周期為100 ~200 s,縱搖、橫搖固有周期均低于4 s,艏搖運動的固有周期高于40 s,整個結構的頻率跨越波浪的一階頻率兩端,可以避免結構和海洋能量集中的頻率發生共振。
Ahmad[3]研究了TLP 在隨機波海浪譜下的耦合響應,同時考慮了不同浸水、浮力和垂直方向波浪力引起的張力變化等各種非線性效應,考察了張力變化引起的次諧波共振,同時也考察了變化浸水效果引起的次諧波共振。Chandrasekaran 等[4]研究了隨機波載荷下三角形TLP 的動態響應,對六個自由度響應進行了譜分析得出響應規律,同時考慮耦合、可變浸水以及流的影響。Tabeshpour 等[5]在時域和頻域中對TLP 進行了非線性動態分析,隨機波的時間歷程基于PM 譜,隨機波以任意浪向角作用在結構上。余建星等[6]分析了平臺總體響應分析的基本方法,包括頻域分析和時域分析的方法,將不同的分析技術相結合,提供了不同的分析策略,為張力腿平臺總體響應分析的深入研究提供了一定的基礎。“典型深水平臺概念設計研究”課題組[7]以1 000 m 水深TLP 平臺為例,詳細敘述了TLP 平臺水動力分析的過程和方法,包括有限元模型的建立,水動力特征的計算,水動力載荷響應的計算以及運動響應分析。
文中提出了一種新型的延展式張力腿平臺,新型平臺由四個立柱和一個環形浮箱連接而成,環形浮箱是由四個箱型梁焊接而成。與傳統延展式張力腿平臺相比,由于延展結構與浮箱成為一體結構,新型平臺分塊少,接口焊縫少,而且延展結構的接口焊縫也不需要考慮。參考以上研究對新型延展式張力腿平臺進行風、浪、流環境荷載的綜合作用和平臺、張力腿的相互耦合作用下的時域耦合分析,同時模擬波浪破碎作為沖擊荷載,研究了新型平臺在沖擊荷載作用下的運動位移時程、張力腿系統張力時程等結果,通過分析證明新型延展式平臺有良好的運動響應。
1 新型延展式平臺的設計和尺寸
1.1 新型平臺的設計
新型延展式張力腿平臺(ETLP)由上部組塊、主體和張力腿系統組成,其中主體依然由浮箱和立柱組成。基于所選環境條件和上部甲板重量確定采用四立柱形式,浮箱是由四根箱型梁焊接而成,每個箱型梁的一端焊接到另一根梁梁長四分之一處,另一端為自由端,距其梁長約四分之一與另一梁焊接相連。立柱截面為方形截面,只要方立柱上的圓角足夠大(r≈D/4)就能達到大多數圓立柱的水動力性能的優勢,盡管大部分采用圓立柱,但是總體趨勢是采用方立柱,影響截面選擇的主要因素的浮箱、立柱及張力腿的連接方式,平臺采用12 根張力腿系泊,張力腿連接在浮箱自由端的外側,每一個自由端處連接三根張力腿。新型ETLP 的四個延展結構與浮箱為整體結構,從而只有8 個分塊結構,與傳統結構相比減少了4 個分塊,其對比結構示意如圖1 和圖2 所示。
新型ETLP 中延展結構就是浮箱的一部分,這不僅解決了延展結構的連接問題,而且延展結構與浮箱成為一體結構,改善了延展結構的強度和疲勞可靠性問題。
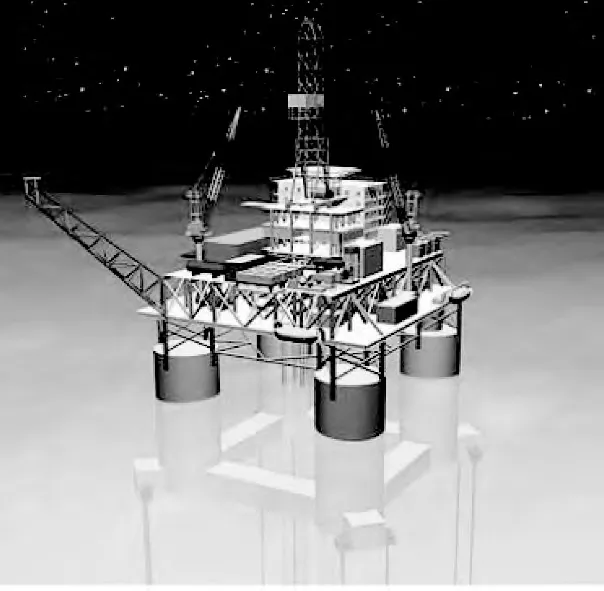
圖1 傳統延展式張力腿平臺Fig.1 Traditional extended tension leg platform
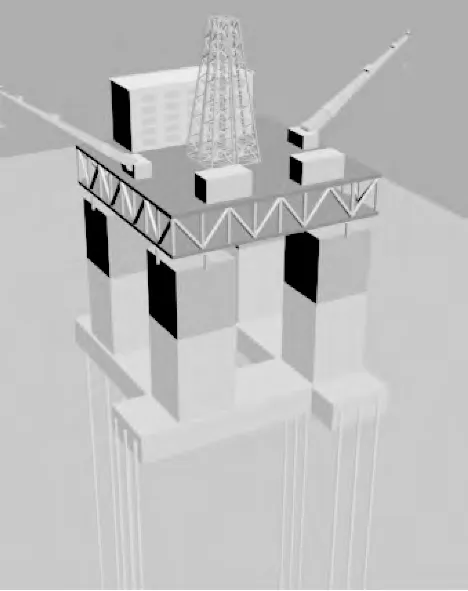
圖2 新型延展式張力腿平臺Fig.2 New extended tension leg platform
1.2 新型平臺的尺寸
根據平臺的設計依據,初步選擇平臺主體結構尺寸,平臺的主尺寸如表1 所示。

表1 新型延展式張力腿平臺參數Tab.1 New ETLP specifications
2 時域耦合計算方法
工作在海面上的平臺受到風、浪、流等環境荷載的綜合作用,有時還會遇到極端環境條件,平臺運動響應主要指正常工作條件下平臺六個自由度的運動響應,直接影響到平臺的正常作業。時域下的分析預報是預報波浪上海洋結構物運動響應的經典方法。
2.1 時域運動控制方程
2.1.1 風荷載
風選取NPD 風譜進行模擬,表達式:

式中:SNPD(f)為風能譜密度,f 是頻率,U0是海面以上10 米處一小時的平均風速,z 是海面以上標高,U(z)是在高度為z 處的平均風速。
根據ABS 規范[8],風載荷可以定義:

式中:α =0.611,Vk則為風速,Ch指直接承受風荷載的平臺構件的高度系數,Cs為平臺構件的形狀系數,A 為平臺構件的投影面積。
2.1.2 流荷載
海洋中海洋結構物將受到海流的作用,流作用下結構物受到的力和力矩表達式:

式中:V 為流相對于平臺的速度;ρw為流體密度;A 為平臺在流速方向上的投影面積;Cdc為流阻力系數;L為力作用點到平臺重心的距離。
2.1.3 時域運動方程
各種載荷下,考慮系泊系統的平臺時域運動方程:

式中:Fwa(1)( t )、Fwa(2)( t )、Fwi( t )、Fcu( t )和Fmo( t )分別為一階波浪荷載、二階波浪荷載、風荷載、流荷載和系泊纜張力時程;mij為平臺的質量矩陣;μij為附加質量矩陣;Cij為恢復力系數矩陣;Lijt (-τ) 為系統的時延函數。
已知頻域內浮體運動的附加質量系數μij(ω) 和阻尼系數λij(ω) ,有:
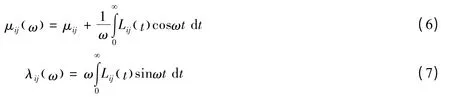
時延函數表達式:

2.2 動響應耦合分析
耦合分析中,將平臺和張力腿系統作為一個整體系統進行時域的動態耦合計算。離散化的張力腿系統耦合運動方程[9]:

式中:RI(x,t),RD(x,t),RS(x,t),RE(x,t)分別為慣性力矢量、阻尼力矢量、內力矢量、外力矢量。
慣性力矢量為:

式中:Ms為平臺及系泊系統的質量矩陣,包括結構本身的質量和附加質量。
阻尼力矢量為:

式中:Cs為系統阻尼矩陣,包括內結構阻尼和水動力阻尼。RS(x,t)的計算基于單元的每一瞬時的應力狀態,RE(x,t)包括重力和浮力、錨鏈與海底作用力、海洋環境力和特定作用力。
求解平臺的時域運動方程時,要充分考慮張力腿的作用力對平臺運動的影響;而在進行張力腿動力計算時,必須以平臺的運動和位移作為邊界條件。總的來說,張力腿的存在限制了平臺的運動,而平臺的運動又導致了張力腿系統的非線性變化,因此必須將二者聯合起來進行耦合分析,通過迭代求解,求得整個系統在每一時刻的運動、位置和受力情況[10]。
2.3 沖擊荷載計算
深水條件下,當波陡大于1/7 也會發生波浪破碎,此時,波高超過波長的14%。DNV[11]規范建議:對破碎波荷載應區分崩碎波(spilling)、卷碎波(plunging)和激碎波(surging)而采用不同的公式計算。這里選擇的破碎波類型為崩碎波,用小振幅波計算相關波浪參數。
對于卷碎波(plunging),其作用在圓柱體上的沖擊荷載可按下式計算:

式中:CS為砰擊系數,對于光滑的圓柱體,3.0 ≤CS≤2π,DNV 規范建議取CS=5.15;ρw為海水密度;A 為砰擊力的作用面積;v 為水質點與圓柱體的相對速度。
如果卷碎波正好在垂直圓柱體前破碎,則沖擊力的持續時間可按下式計算:

式中:c 為波速;D 為圓柱體直徑。
對于激碎波和崩碎波,沖擊荷載和砰擊系數CS分別按下式計算:

式中:s 為穿透系數,表示破碎波浸沒圓柱體的距離,0 <s <D。沖擊開始時,s =0,CS(0)=5.15;當圓柱體全部浸沒在破碎波中,s=D,CS(D)=0.8。

圖3 新型延展式張力腿平臺耦合模型Fig.3 New ETLP coupling model
3 時域耦合分析計算結果
建立新型延展式張力腿平臺分析模型,考慮風浪環境載荷,在時域內進行了計算分析,得到了新型延展式張力腿平臺的波浪時程、平臺運動響應以及波頻運動響應時程。
圖3 為時域分析時延展式張力腿平臺與張力腿系統的耦合分析模型。采用SESAM 軟件Deep C 模塊對新型延展式張力腿平臺在南海環境條件下進行了時域耦合分析,分析時長10 800 s,間隔0.5 s。時域分析中采用南海海域百年一遇海洋環境條件,選取平臺迎浪情況的計算結果進行研究,百年一遇海洋環境條件如表2 所示。
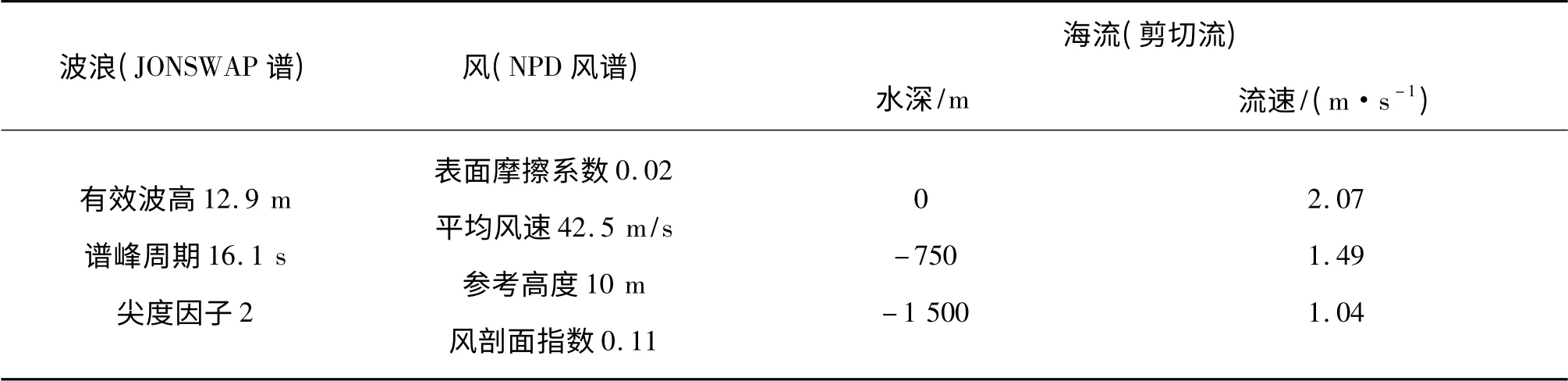
表2 南海海域百年一遇環境參數選取Tab.2 Once-in-a-century environment parameters selection
3.1 運動響應耦合分析結果
延展式張力腿平臺運動時程主要指六個自由度的運動響應結果,對張力腿平臺而言,其水動力性能與響應有密切的聯系,因而應將平臺的響應盡量控制在一個可以接受的范圍內。按照鉆井作業對平臺搖蕩的要求,一般規定浮動式平臺運動響應設計值:搖擺≤±3°,升沉≤±1 m,漂移≤工作水深的5%[7]。
圖4 分別為延展式張力腿平臺的縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖的波頻時程曲線。從平臺時程曲線可知,平臺水平面內的偏移量極值出現在縱蕩的時程結果中,時間在3 400 s,極值為-30.45 m,為水深的2.03%;平臺的搖擺角度極值出現在縱搖的時程結果中,時間在8 000 s,極值為-0.44°;平臺的升沉出現在垂蕩時程的9 000 s,極值是-0.89 m,滿足設計要求。
通過時域耦合分析得到12 根張力筋腱的應力時程曲線,通過比較得知發生最大應力的筋腱為4 號筋腱,其張力時程曲線如圖5 所示。筋腱所用鋼材型號為NV-32,屈服極限為315 MPa。由圖可知最大筋腱張力值出現在筋腱張力時程的8 000 s,為3.06 ×107N。此時筋腱應力σ =Tmax/A =259.93 MPa,小于筋腱的最大拉應力315 MPa×0.9 =283.5 MPa,因此張力筋腱的強度滿足安全要求。
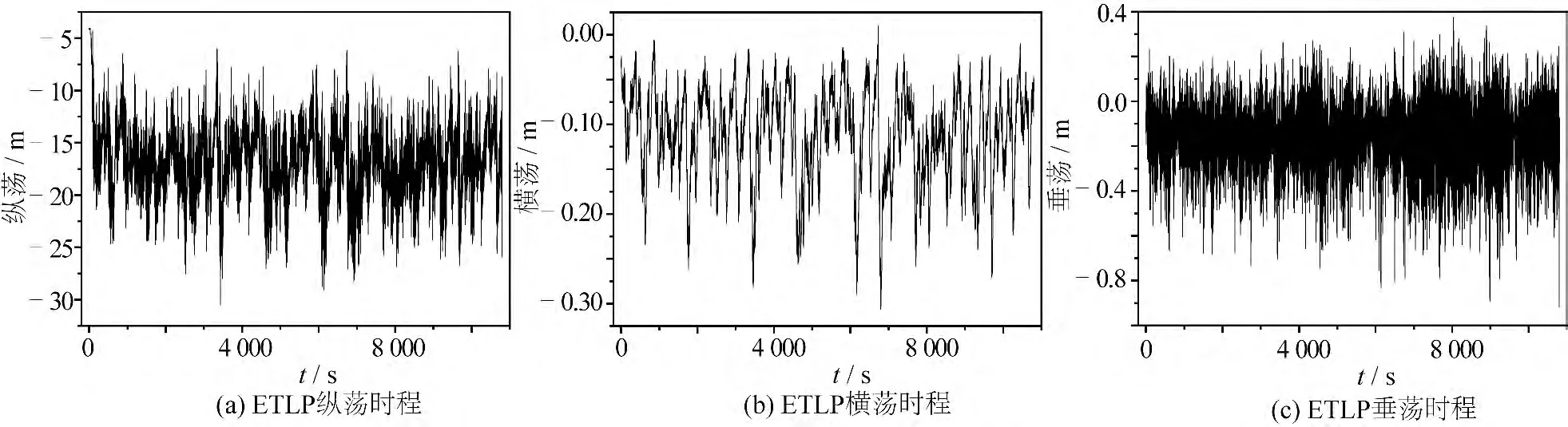
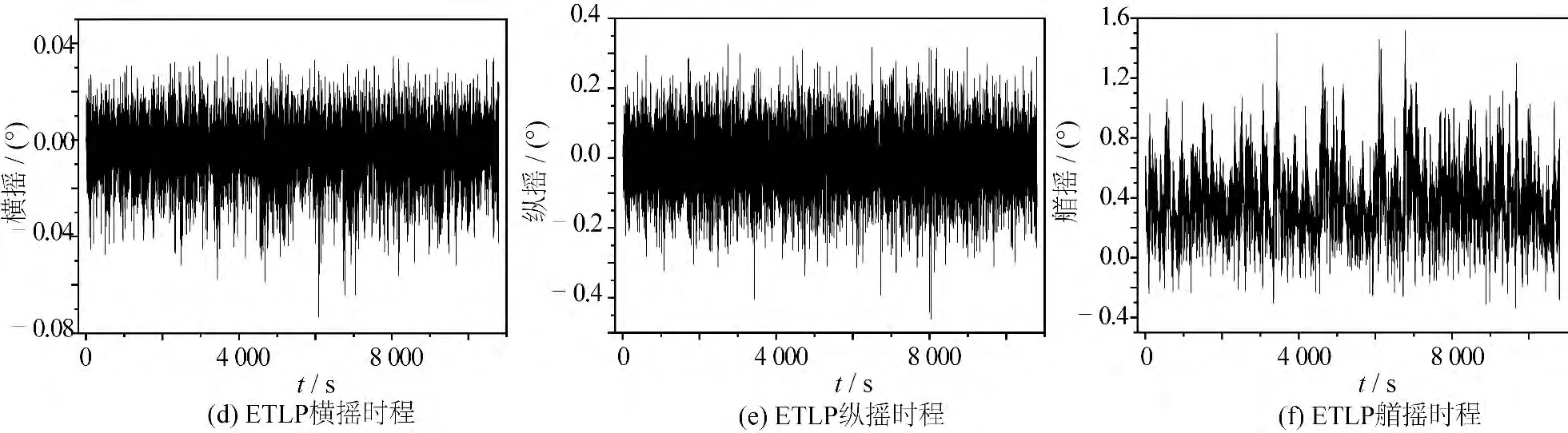
圖4 延展式張力腿平臺時程曲線Fig.4 Time domain result of ETLP
3.2 沖擊荷載作用下的耦合分析

圖5 4 號張力筋腱張力時程Fig.5 No.4 tendon’s tension time domain result
根據文中提出的理論計算得出深水破碎波作用在平臺立柱上的的數值和作用時間,在輸入百年一遇南海環境條件之后,將深水破碎產生的荷載作為沖擊荷載作用在平臺模型上,方向為0°,得到平臺在沖擊荷載作用下的時域耦合結果。
圖6 分別是延展式張力腿平臺的縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖的波頻時程曲線。從平臺時程曲線可知,平臺水平面內的偏移量極值出現在縱蕩時程結果中,時間在3 400 s,極值為-30.53 m,為水深的2.04%;平臺的搖擺角度極值出現在縱搖時程結果中,時間在3 400 s,極值為-0.46°;平臺的升沉極值出現在垂蕩時程的9 000 s,為-0.92 m,滿足設計要求。
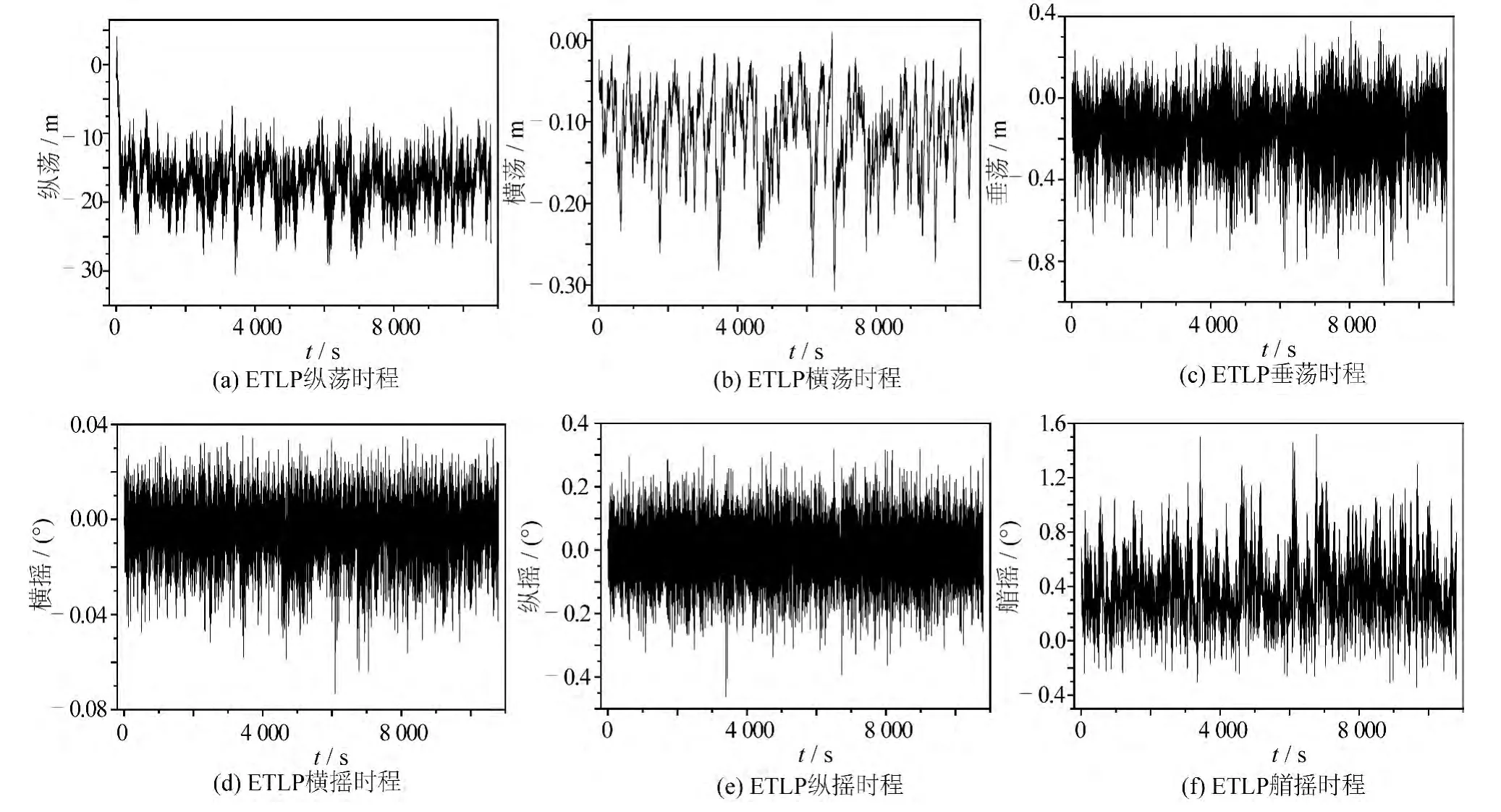
圖6 沖擊載荷作用下延展式張力腿平臺時程曲線Fig.6 Demain result of ETLP under the impact load

圖7 沖擊載荷作用下4 號張力筋腱張力時程Fig.7 No.4 tendon’s tension time domain result
與正常百年一遇南海環境條件下的平臺響應的不同之處,在于初始時刻,平臺產生一個X 軸正向的位移,約為4.14 m,未超出平臺平面內允許的最大偏移量。這是平臺在初始時刻受到沖擊荷載的作用而產生的位移。由于沖擊荷載作用時間非常短暫,在隨后的時程中,平臺失去沖擊荷載的作用,沖擊荷載作用所致位移開始衰減,大約200 s 后,在張力筋腱的張力作用下回復至原時程響應位置。
同時,由圖6 可知,其他五個自由度上的平臺響應時程曲線分別與正常百年一遇南海環境條件下的響應曲線比較近似,故其時程響應受沖擊荷載影響不大。
通過時域耦合分析得到12 根張力筋腱的應力時程曲線,通過比較得知發生最大應力的筋腱為4 號筋腱,其張力時程曲線如圖7 所示。由圖可知最大筋腱張力出現在筋腱張力時程的8 000 s,極值為3.06 ×107N。此時筋腱內的應力σ=Tmax/A=259.93 MPa,小于筋腱的最大拉應力315 MPa ×0.9 =283.5 MPa,因此張力筋腱的強度滿足安全要求。
4 結 語
提出了一種新型延展式張力腿平臺,利用環形浮箱以及浮箱與延展結構一體化減少了平臺主體結構的連接焊縫和結構分塊,避免了延展結構與立柱的連接,提高了平臺的結構強度和疲勞可靠性。進一步通過對新型延展式張力腿平臺和張力腿系統的時域耦合分析,證明了新型平臺具有良好的運動響應,張力筋腱應力滿足安全要求。同時通過模擬沖擊荷載,得到平臺在沖擊荷載作用下的時程響應,結果表明新型平臺的運動響應符合要求,對我國張力腿平臺平臺的研發和設計優化具有重要意義。
[1]李潤培,謝永和,舒志.深海平臺技術的研究現狀和發展趨勢[J].中國海洋平臺,2003,18(3):1-5.(LI Runpei,XIE Yonghe,SHU Zhi.A review on the technical development of deep water offshore platform[J].China Offshore Platform,2003,18(3):1-5.(in Chinese))
[2]SUBRATA K,Chakrabarti.Handbook of offshore engineering[M].London:Elsevier Ltd,2005.
[3]AMAD S.Stochastic TLP response under long crested random sea[J].Computers & Structures,1996,61(6):975-993.
[4]CHANDRASEKARAN S,JAIN A K.Triangular configuration tension leg platform behavior under random sea wave loads[J].Ocean Engineeing,2002,29:1895-1928.
[5]TABESHPOUR M R,GOLAFSHANI A A,SEIF M S.Comprehensive study on the result of tension leg platform response in random sea[J].Journal of Zhejiang University,Science A,2006,7(8):1305-1317.
[6]余建星,張中華,于皓.張力腿平臺總體響應分析方法研究[J].海洋通報,2008,27(2):97-102.(YU Jianxing,ZHANG Zhonghua,YU Hao.Research on TLP global response analysis method[J].Marine Science Bulletin,2008,27(2):97-102.(in Chinese))
[7]“典型深水平臺概念設計研究”課題組.張力腿平臺水動力響應分析[J].中國造船,2005,46(S):477-489.(The Group for Typical Deep Water Platform Conceptual Design.Hydrodynamic analysis for TLP[J].Shipbuilding of China,2005,46(S):477-489.(in Chinese))
[8]ABS,Rules for building and classing mobile offshore drilling units[S].2007.
[9]CUMMINS W E.The impulse response function and ship motions[M].Schiffstechnik,1962.
[10]陳新權.深海半潛式平臺初步設計中的若干關鍵問題研究[D].上海:上海交通大學,2007.(CHEN Xinquan.Research on preliminary design of deepwater semisubmersible[D].Shanghai:Shanghai Jiao Tong University,2007.(in Chinese))
[11]DNV-OS-J101,Design of offshore wind turbine structures[S].2004.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50