十字形多自由度超聲電機(jī)接觸分析模型研究*
2015-11-24 12:03:24張健滔
機(jī)械制造 2015年10期
□ 劉 揚(yáng) □ 張健滔
1.上海大學(xué) 機(jī)電工程與自動化學(xué)院 上海 200072
2.上海大學(xué) 上海市智能制造及機(jī)器人重點(diǎn)實(shí)驗(yàn)室 上海 200072
十字形多自由度超聲電機(jī)接觸分析模型研究*
□ 劉 揚(yáng)1,2□ 張健滔1,2
1.上海大學(xué) 機(jī)電工程與自動化學(xué)院 上海 200072
2.上海大學(xué) 上海市智能制造及機(jī)器人重點(diǎn)實(shí)驗(yàn)室 上海 200072
十字形多自由度超聲電機(jī)其動子繞X、Y軸旋轉(zhuǎn)與繞 Z軸旋轉(zhuǎn)的驅(qū)動機(jī)理是不同的,根據(jù)彈性接觸理論,對其進(jìn)行了分別考慮,并建立了電機(jī)摩擦接觸分析模型。利用建立的模型,對多自由度電機(jī)機(jī)械特性進(jìn)行了估算,分析了定子振幅、摩擦因數(shù)、驅(qū)動頻率對電機(jī)輸出性能的影響規(guī)律。對所研制樣機(jī)的機(jī)械特性進(jìn)行了測試,結(jié)果表明,所建立的模型對十字形超聲電機(jī)特性的預(yù)估是有效的,可為多自由度超聲電機(jī)設(shè)計提供指導(dǎo)。
多自由度超聲電機(jī) 接觸模型 仿真分析 機(jī)械特性
隨著機(jī)電系統(tǒng)的發(fā)展,使用多自由度驅(qū)動的場合越來越多,例如多自由度運(yùn)動平臺、機(jī)器人關(guān)節(jié)與眼球驅(qū)動等,這些應(yīng)用對驅(qū)動器提出了體積小、功率密度大、定位精度高等要求。傳統(tǒng)的多個單自由度電機(jī)驅(qū)動,存在結(jié)構(gòu)復(fù)雜、體積大、質(zhì)量重等問題。因而對多自由度電機(jī)的研究十分必要,特別是多自由度超聲電機(jī),由于其具有結(jié)構(gòu)簡單、直接驅(qū)動、推重比大、慣性小、響應(yīng)快、斷電自鎖、可控制性好和定位精度高等優(yōu)點(diǎn),備受國內(nèi)外學(xué)者的關(guān)注[1-5]。
建立多自由度超聲電機(jī)定、動子接觸模型,有助于理解其運(yùn)行機(jī)理,了解各參數(shù)對機(jī)械特性的影響,可為電機(jī)設(shè)計提供指導(dǎo)。目前研究較多的是行波型多自由度超聲電機(jī)的理論模型,最早,Takashi Maeno[6]利用有限元方法建立了行波型單自由度超聲電機(jī)模型。Joachim[7]通過假設(shè)定子為伯努利-歐拉梁,建立了行波單自由度超聲電機(jī)定、動子接觸模型。國內(nèi)學(xué)者也對行波單自由度超聲電機(jī)的定、動子接觸模型進(jìn)行了深入研究,周盛強(qiáng)等利用有限元三維點(diǎn)點(diǎn)接觸單元,分析了接觸界面的接觸狀態(tài),曲建俊等假設(shè)定子摩擦層為黏彈性體,提出了行波超聲電機(jī)黏彈性接觸模型[4-5,8-9]。這些學(xué)者深入研究了行波單自由度超聲電機(jī)接觸模型,但有關(guān)多自由度超聲電機(jī)接觸模型的研究很少有報道。筆者對所研制的一款十字形多自由度超聲電機(jī)的定、動子接觸機(jī)理進(jìn)行了研究,并建立其理論接觸模型,利用該模型進(jìn)行電機(jī)機(jī)械特性仿真。
1 十字形多自由度超聲電機(jī)接觸模型
1.1 十字形多自由度超聲電機(jī)結(jié)構(gòu)
研制的一款十字形多自由度超聲電機(jī)結(jié)構(gòu)如圖1所示,電機(jī)動子為球形金屬體,定子整體結(jié)構(gòu)呈十字
形,定子中心開方形盲孔,將定子分為后驅(qū)動足、右驅(qū)動足、前驅(qū)動足、左驅(qū)動足,4片壓電陶瓷非對稱地貼在定子的4個驅(qū)動足上。動子直徑大于定子中心方形盲孔的寬度,定子與動子沿豎直方向具有一定的接觸壓力,并通過摩擦傳動。該超聲電機(jī)可實(shí)現(xiàn)繞X、Y、Z軸旋轉(zhuǎn),具有結(jié)構(gòu)緊湊、構(gòu)件少、易于小型化等特點(diǎn)。
十字形多自由度超聲電機(jī)利用兩個振動模態(tài)工作,如圖2所示。第一振動模態(tài)的振型如圖2(a)所示,其左右驅(qū)動足交替伸長、收縮。第二振動模態(tài)的振型如圖2(b)所示,其前后驅(qū)動足交替伸長、收縮,兩個工作振動模態(tài)的頻率需近似相等。

▲圖1 十字形多自由度超聲電機(jī)樣機(jī)
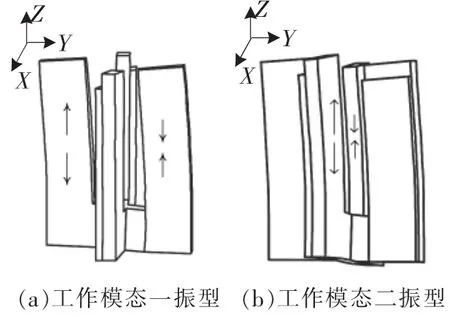
▲圖2 電機(jī)工作模態(tài)振型
1.2 繞X、Y軸旋轉(zhuǎn)時的定、動子接觸模型
電機(jī)定子驅(qū)動動子繞X、Y軸旋轉(zhuǎn)時,工作機(jī)理類似,只需激勵出其中一個工作模態(tài)。以繞X軸旋轉(zhuǎn)為例進(jìn)行分析,此時只需激勵出工作模態(tài)一。電機(jī)正常工作時,定子驅(qū)動足與動子接觸點(diǎn)作斜線運(yùn)動。定子工作時驅(qū)動質(zhì)點(diǎn)P的位移響應(yīng)為:

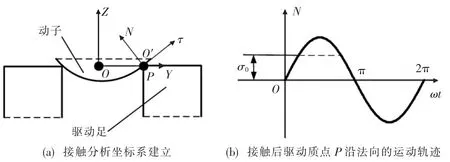
當(dāng)電機(jī)穩(wěn)態(tài)工作時,定、動子間接觸狀態(tài)如圖3所示。式(1)表示定子工作時驅(qū)動質(zhì)點(diǎn)P位移響應(yīng)可轉(zhuǎn)換到NOτ坐標(biāo)系,如圖3(a)所示,即:

在一個驅(qū)動周期內(nèi),驅(qū)動質(zhì)點(diǎn)與動子的狀態(tài)分為:接觸期和脫離期。當(dāng)定子、動子穩(wěn)定工作后,驅(qū)動質(zhì)點(diǎn)P沿法向N的位移如圖3(b)所示,σ0表示定子穩(wěn)態(tài)工作時驅(qū)動質(zhì)點(diǎn)的法向平衡位置面到動子接觸表面的距離。
在驅(qū)動質(zhì)點(diǎn)與動子脫離時,動子沿N方向的接觸變形量δN(t)=0;接觸時,可表示為:

式中:WC為定子、動子接觸狀態(tài)下定子驅(qū)動點(diǎn)的振幅。
設(shè)ta、td分別為驅(qū)動足與動子開始接觸及開始脫離時間,一個驅(qū)動周期內(nèi)定子與動子接觸時間為:

設(shè)ε=Tj/T,T為驅(qū)動周期,所以有:

在驅(qū)動足與動子接觸時段內(nèi),定子驅(qū)動質(zhì)點(diǎn)的法向和切向位移及速度都是變化的。為簡化分析,由于電機(jī)穩(wěn)態(tài)工作時定、動子間接觸頻率很高,且動子有一定慣性,可假定動子在穩(wěn)態(tài)工作時速度不變?yōu)関s1。驅(qū)動足與動子接觸區(qū)域內(nèi),定子驅(qū)動足上質(zhì)點(diǎn)切向振動速度vτ不斷變化,故在接觸時段內(nèi)存在等速點(diǎn)(即定子驅(qū)動點(diǎn)切向振動速度與動子切向速度相同的點(diǎn)),如圖4所示。
根據(jù)庫侖定律,驅(qū)動足與動子間的摩擦力為:
▲圖3 驅(qū)動足與動子接觸狀態(tài)示意圖
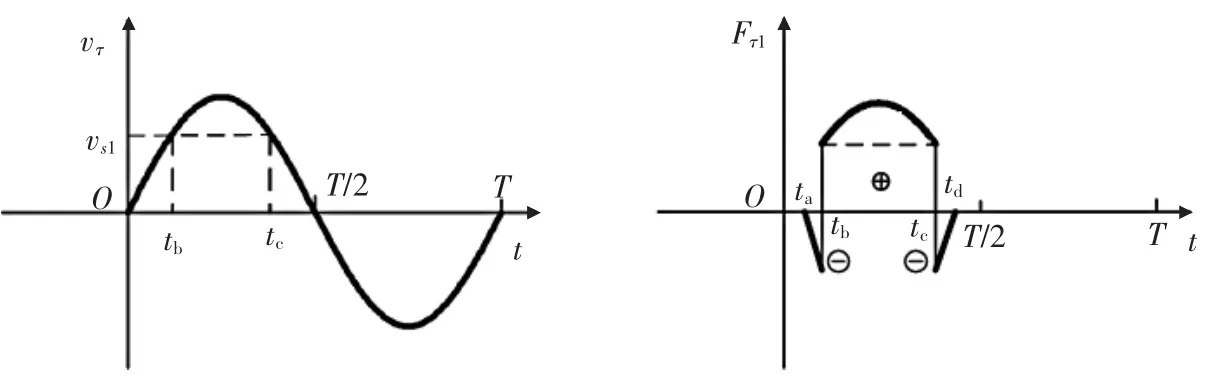
▲圖4 一個周期內(nèi)定、動子切向速度關(guān)系及做功示意圖

式中:μd為驅(qū)動足與動子間動摩擦因數(shù)。
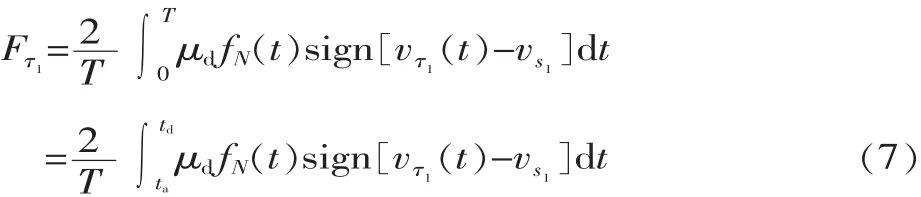
根據(jù)動量定理,一個周期內(nèi)定子對動子的平均驅(qū)動力(沿切線方向)為:
故十字形多自由度電機(jī)繞X軸旋轉(zhuǎn)時輸出力矩為:
式中:l為驅(qū)動力的力臂;D為動子直徑。
以上兩式中的符號函數(shù)為:

1.3 繞Z軸旋轉(zhuǎn)時的定、動子接觸模型
1.3.1 面外行波分析
十字形多自由度超聲電機(jī)繞Z軸旋轉(zhuǎn)時,將用正弦、余弦電信號同時激勵出兩個工作振動模態(tài),此時定子驅(qū)動端產(chǎn)生行波來驅(qū)動動子,驅(qū)動足與動子間的接觸比較連續(xù)平穩(wěn)。根據(jù)赫茲接觸理論,驅(qū)動足與動子間的接觸力可分解為兩個部分,即沿Z軸的接觸力與沿徑向的接觸力。沿Z軸的接觸力為:

式中:kZ為動子沿Z軸方向的等效彈簧剛度;δZ為動子沿Z軸方向的接觸變形量,與定子振幅、動子接觸剛度等相關(guān)。
根據(jù)庫侖定律,驅(qū)動足與動子間的摩擦力為:

十字形多自由度超聲電機(jī)繞Z軸旋轉(zhuǎn)時,可將電機(jī)沿Z軸方向中心線展開,根據(jù)赫茲接觸理論,此時定子與動子可等效于球體(定子)與面 (動子)接觸的情況。故當(dāng)僅考慮面外行波驅(qū)動時,驅(qū)動足與動子間的接觸界面如圖5所示。
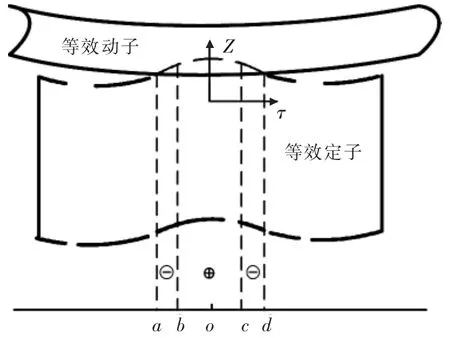
▲圖5 驅(qū)動足與動子沿Z軸方向接觸狀況
在圖5中,區(qū)間[a,d]為一個周期內(nèi)接觸區(qū)域,b、c點(diǎn)代表等速點(diǎn),即定子振動速度與動子切向速度相同點(diǎn)。在[b,c]區(qū)域內(nèi),驅(qū)動足表面質(zhì)點(diǎn)切向振動速度大于動子切向速度,這一區(qū)域內(nèi)摩擦力做正功,定子對動子起驅(qū)動作用,該區(qū)域?yàn)轵?qū)動區(qū)間。在[a,b]及[c,d]區(qū)域內(nèi),驅(qū)動足表面質(zhì)點(diǎn)切向振動速度小于動子切向速度,該區(qū)域內(nèi)摩擦力做負(fù)功,定子對動子起阻礙作用,這些區(qū)域稱為制動區(qū)間。
在分析定子、動子接觸狀況時,假設(shè)定子、動子材料具有彈性特性,根據(jù)赫茲理論,在沿Z軸方向預(yù)壓力Fp作用下,接觸區(qū)域的接觸寬度為:

式中:r0為等效定子球體半徑;E1為定子材料彈性模量;E2為動子材料彈性模量;u1為定子材料泊松比;u2為動子材料泊松比;p為單位長度上的載荷,且:
式中:L為定子與動子沿Z軸方向接觸長度;Fp為動子對定子沿Z方向的作用力。
在接觸區(qū)間[o,d]內(nèi),接觸力沿切向τ(半徑)方向的分布可表示為:

式中:q0為區(qū)間[o,d]上的最大應(yīng)力,可表示為:

在接觸區(qū)域內(nèi)接觸應(yīng)力關(guān)于中點(diǎn)對稱,因此區(qū)間[a,o]上的接觸力也可用式(14)表示。驅(qū)動足與動子接觸過程中,假定驅(qū)動質(zhì)點(diǎn)切向運(yùn)動速度與動子切向速度不同,則存在打滑,否則,兩者相互黏結(jié)。結(jié)合庫侖定律,定子對動子產(chǎn)生的驅(qū)動轉(zhuǎn)矩為:
1.3.2 面內(nèi)行波分析
當(dāng)僅考慮定子產(chǎn)生的面內(nèi)行波作用,其產(chǎn)生徑向力可表示為:

式中:kr為動子沿徑向的等效彈簧剛度;δr為動子沿徑向接觸變形量,與定子振幅、動子接觸剛度等相關(guān)。
切向摩擦力可表示為:

此時,定、動子間的接觸情況如圖6所示,圖中[a′,d′]為定、動子的接觸區(qū)間,b′、c′為等速點(diǎn),那么區(qū)間[b′,c′]為驅(qū)動區(qū)間,區(qū)間[a′,b′]及[c′,d′]為制動區(qū)間。
根據(jù)彈性接觸理論[10-12],沿徑向預(yù)壓力作用下Fr的接觸弧度α可表示為:


▲圖6 驅(qū)動足與動子沿徑向接觸狀況

式中:rs、r0為等效定子、等效動子的半徑;Dα為Dund-urs參數(shù)。
最終,定、動子接觸長度可表示為:

在接觸區(qū)間[o,d′]內(nèi),接觸 力沿切向分布力為:

由于接觸區(qū)域內(nèi)的接觸力關(guān)于原點(diǎn)對稱,故區(qū)間[a′,o]內(nèi)的接觸力亦可用式(23)表示。面內(nèi)行波產(chǎn)生的轉(zhuǎn)矩為:
式中:L′為定子與動子沿Z軸方向接觸長度;vτ3(t)為驅(qū)動足表面質(zhì)點(diǎn)切向速度。
綜上所述,繞Z軸旋轉(zhuǎn)時輸出力矩為:

2 機(jī)械特性仿真及分析
根據(jù)所建立的十字形多自由度超聲電機(jī)接觸模型,利用MATLAB進(jìn)行仿真計算,分析電機(jī)各參數(shù)對電機(jī)輸出性能的影響,有助于了解十字形多自由度超聲電機(jī)在不同條件下的工作狀態(tài)及輸出性能,為電機(jī)設(shè)計提供參考。
2.1 仿真參數(shù)
表1為進(jìn)行仿真計算時所采用多自由度電機(jī)的相關(guān)參數(shù)的基值。研究其中某參數(shù)對電機(jī)輸出性能的影響時,取表中基值附近范圍內(nèi)的值進(jìn)行仿真分析。
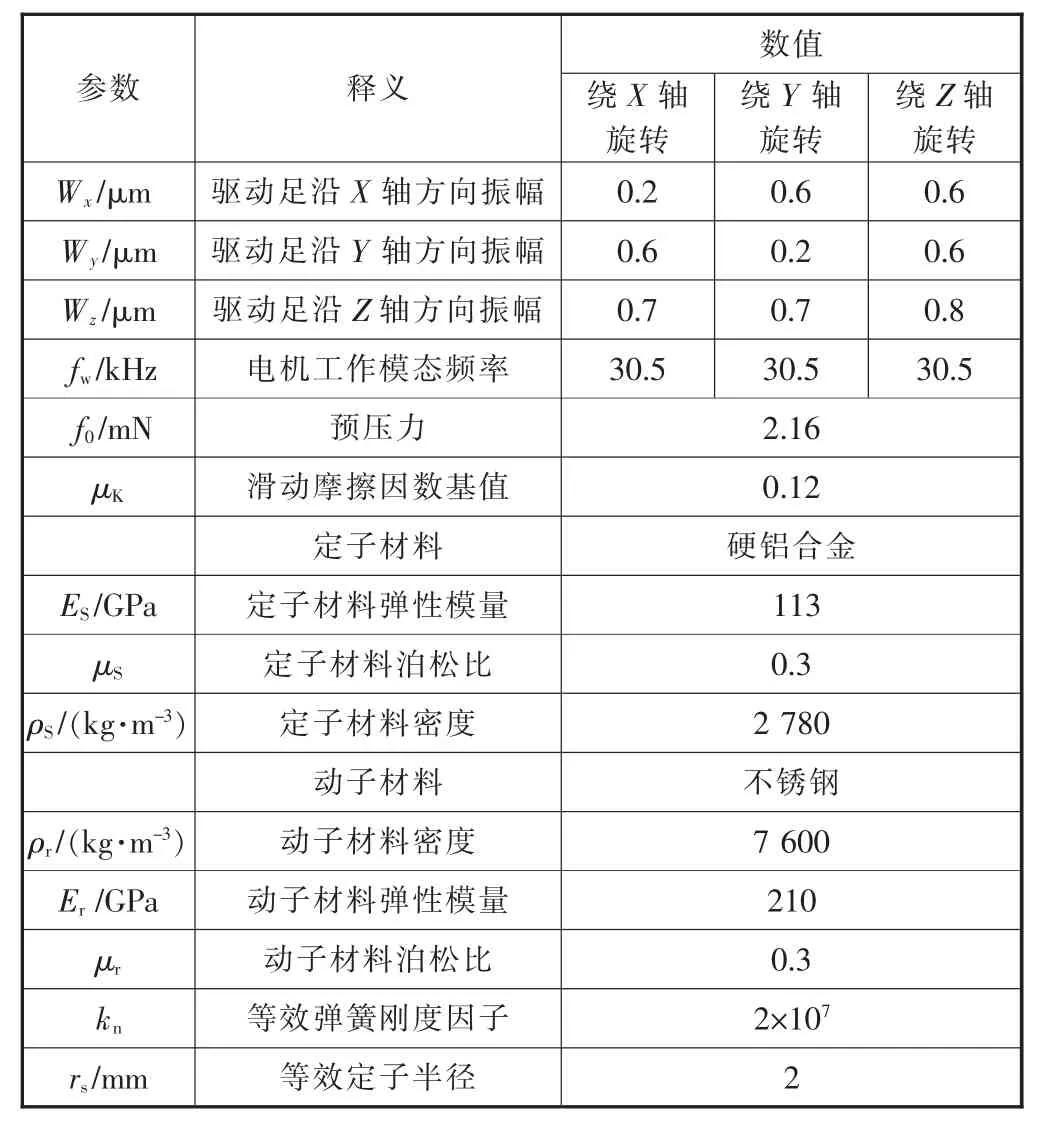
表1 電機(jī)的仿真相關(guān)參數(shù)
2.2 電機(jī)參數(shù)對其性能的影響
2.2.1 定子振幅對電機(jī)輸出特性的影響
定子振幅與定子材料、結(jié)構(gòu)、尺寸以及驅(qū)動電壓的幅值等相關(guān),其它參數(shù)確定的情況下,在一定范圍內(nèi),定子振幅會隨驅(qū)動電壓幅值的增大而增大。圖7所示為定子沿Z軸的振幅對電機(jī)輸出力矩與輸出速度關(guān)系特性曲線的影響。在保持其它參數(shù)不變的情況下,改變定子沿Z軸方向振幅時,電機(jī)的最大輸出力矩及空載速度隨著定子振幅增加而增加,且空載速度比最大輸出力矩對振幅的改變更敏感。
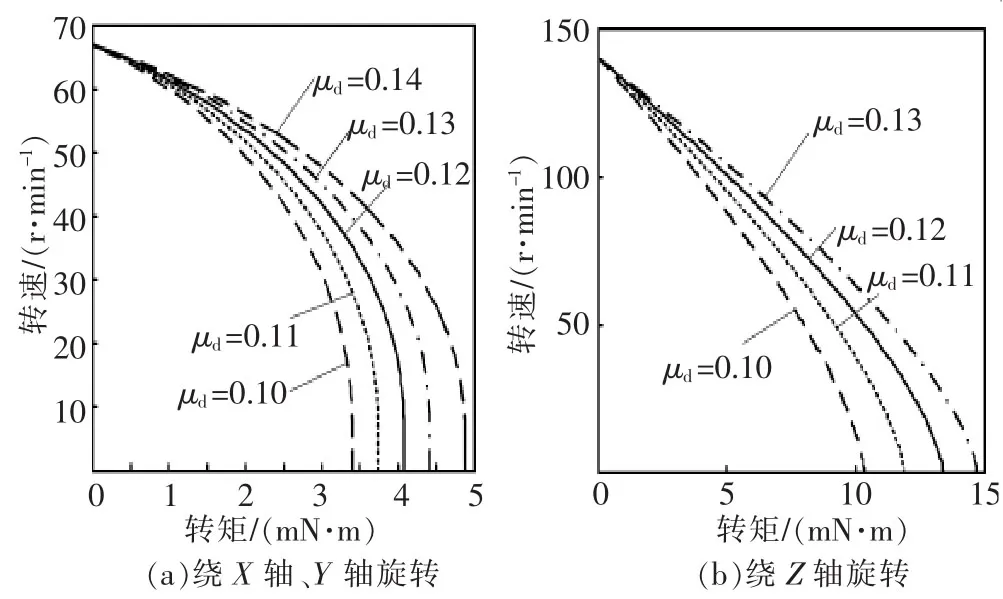
2.2.2 摩擦因數(shù)對電機(jī)輸出特性的影響
定子與動子間的接觸摩擦因數(shù)是影響電機(jī)輸出特性的最重要因素之一。因此,為了解動摩擦因數(shù)對動子輸出特性的影響,對不同摩擦因數(shù)時的輸出響應(yīng)進(jìn)行仿真分析。圖8為只改變摩擦因數(shù)、其它參數(shù)不變的情況下輸出力矩與輸出速度的關(guān)系曲線,從圖中可以看出,電機(jī)的最大輸出力矩隨著摩擦因數(shù)的增大而增大,而空載速度保持不變。
2.2.3 驅(qū)動頻率對電機(jī)輸出特性的影響
圖9為驅(qū)動頻率對電機(jī)輸出特性影響的仿真曲線,從圖中可以看出,隨著驅(qū)動頻率偏離共振頻率越來越遠(yuǎn),電機(jī)的輸出特性越來越差,因?yàn)轵?qū)動頻率偏離共振頻率時,電機(jī)的振動幅值會隨之顯著減小。因而,選取合適的驅(qū)動頻率可以顯著提高電機(jī)工作時的輸出性能,且可通過調(diào)節(jié)驅(qū)動頻率來控制電機(jī)的輸出特性。
3 樣機(jī)試驗(yàn)
利用所研制的多自由度超聲電機(jī)進(jìn)行了樣機(jī)輸出特性試驗(yàn)。
3.1 驅(qū)動電壓與轉(zhuǎn)速關(guān)系
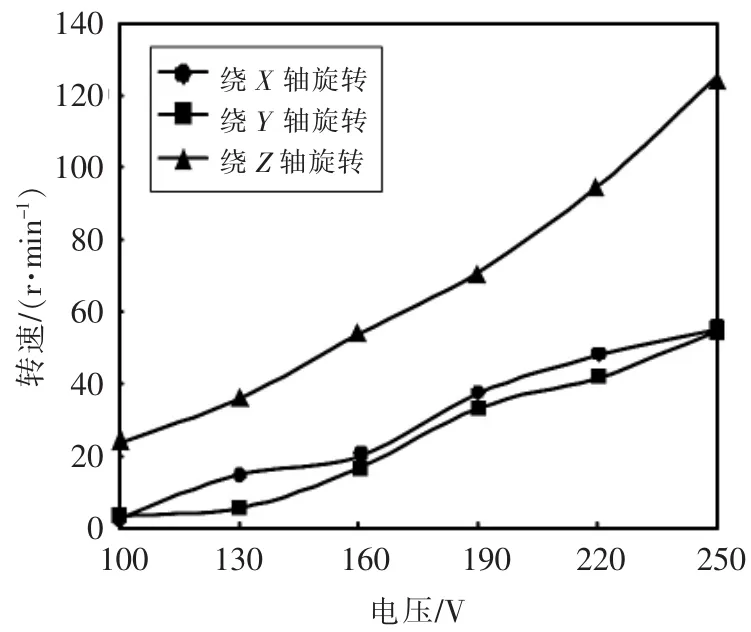
壓電陶瓷片工作電壓過高時容易被擊碎,工作電壓太低時運(yùn)行效率低,為獲得較為合理的工作電壓,測量了超聲電機(jī)驅(qū)動電壓與轉(zhuǎn)速的關(guān)系曲線。

▲圖7 定子振幅WZ對電機(jī)輸出特性的影響
▲圖8 摩擦因數(shù)對電機(jī)輸出特性的影響

▲圖9 驅(qū)動頻率fw對電機(jī)輸出特性的影響
利用信號發(fā)生器(Tektronix AFG3022)與功率放大器(HFPA-41)為電機(jī)供電。在動子上作標(biāo)記,使用攝像機(jī)記錄一段時間內(nèi)動子的運(yùn)動情況,再根據(jù)攝像計算平均轉(zhuǎn)速。以26 kHz為激勵頻率,測試驅(qū)動電壓峰峰值從100~250 V變化時的電機(jī)轉(zhuǎn)速,如圖10所示。電機(jī)繞X、Y、Z軸的轉(zhuǎn)速隨激勵電壓的增加而增加,可通過控制激勵電壓的大小來獲得不同的電機(jī)轉(zhuǎn)速。其實(shí)驅(qū)動電壓減小時,電機(jī)的驅(qū)動振幅也減小,進(jìn)而影響電機(jī)的轉(zhuǎn)速。從圖7仿真曲線可以看出,振幅減小時,計算出來的電機(jī)空載速度也在減小,其與圖10測試的電機(jī)轉(zhuǎn)速變化趨勢基本一致。
3.2 驅(qū)動頻率與轉(zhuǎn)速關(guān)系的試驗(yàn)
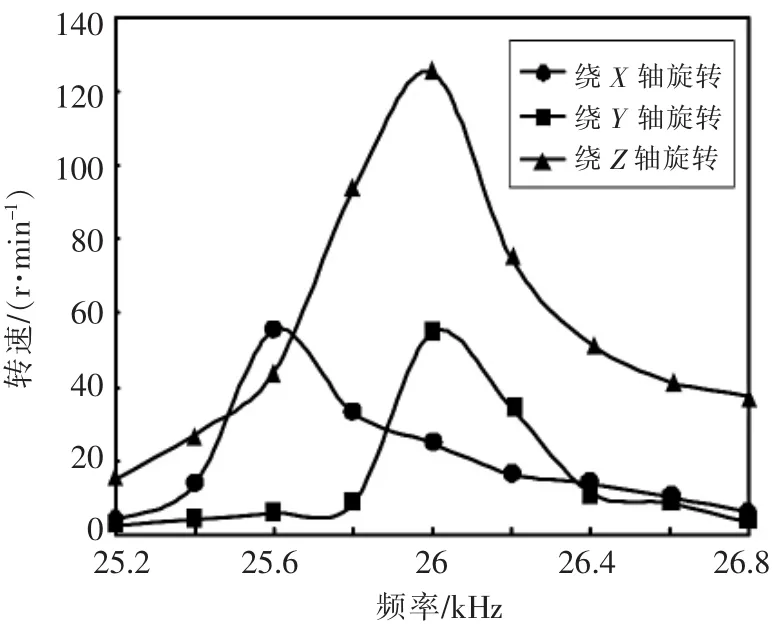
實(shí)測樣機(jī)在不同驅(qū)動頻率下的轉(zhuǎn)速,以獲取驅(qū)動頻率對電機(jī)轉(zhuǎn)速的影響規(guī)律。當(dāng)驅(qū)動電壓峰峰值為250 V時,測得電機(jī)在25.2~26.8 kHz激勵頻率范圍內(nèi)繞X、Y、Z軸的轉(zhuǎn)速。其中當(dāng)驅(qū)動頻率分別為25.6 kHz、26 kHz、26 kHz時,電機(jī)繞X、Y、Z軸旋轉(zhuǎn)的最高轉(zhuǎn)速分別為:55.4 r/min、55 r/min和125.5 r/min。根據(jù)該驅(qū)動頻率與轉(zhuǎn)速的關(guān)系曲線,可以通過改變驅(qū)動頻率的方法來控制電機(jī)的轉(zhuǎn)速。從圖9驅(qū)動頻率對電機(jī)輸出特性的仿真曲線可看出,驅(qū)動頻率偏離共振頻率時,計算出的電機(jī)空載轉(zhuǎn)速將變小。這與圖11試驗(yàn)測試的電機(jī)轉(zhuǎn)速變化趨勢基本一致。
▲圖10 驅(qū)動電壓與轉(zhuǎn)速的關(guān)系曲線
▲圖11 驅(qū)動頻率與轉(zhuǎn)速的關(guān)系曲線
4 結(jié)論
建立十字形多自由度超聲電機(jī)摩擦接觸模型。由于該電機(jī)動子繞X、Y軸旋轉(zhuǎn)與繞Z軸旋轉(zhuǎn)的驅(qū)動機(jī)理不同,該模型利用彈性接觸理論進(jìn)行了分別考慮。
利用所建立的接觸分析模型,對多自由度電機(jī)機(jī)械特性進(jìn)行了估算,分析了定子振幅、摩擦因數(shù)、驅(qū)動頻率對電機(jī)輸出性能的影響規(guī)律。
對研制樣機(jī)的機(jī)械特性進(jìn)行了測試,測試結(jié)果與仿真計算結(jié)果的變化趨勢基本一致,表明所建立模型對十字形超聲電機(jī)的預(yù)估是有效的。本分析模型能有助于十字形多自由度電機(jī)的特性仿真分析和優(yōu)化設(shè)計。
[1]趙淳生.超聲電機(jī)技術(shù)與應(yīng)用[M].北京:科學(xué)出版社,2007.
[2]李志榮,黃衛(wèi)清,趙淳生.多自由度超聲電機(jī)研究的一些新進(jìn)展 [J].振動、測
試與診斷,2003,23(3):161-164.
[3]張健滔,金家楣,趙淳生.新型多自由度圓環(huán)型駐波超聲電機(jī)[J].振動與沖擊,2011,30(12):223-225.
[4]姚志遠(yuǎn),吳 辛,趙淳生.行波超聲電機(jī)定、轉(zhuǎn)子接觸狀態(tài)試驗(yàn)分析[J].振動、測試與診斷,2009,29(4):388-391.
[5]周盛強(qiáng),趙淳生.超聲電機(jī)接觸界面的兩種簡化有限元模型[J].振動、測試與診斷,2009,29(3):251-255.
[6]Takashi M,Takayuki T,Akiro M.Finite-element Analysis of the Rotor/Stator Contact in a Ring-type Ultrasonic Motor[J].IEEE Transactions on Ultrasonics,F(xiàn)erroelectrics,and Frequency Control,1992,39(6):668-674.
[7]Joachim P S,Peter H,Miao Bingqi.A Note on the Contact Problem in an Ultrasonic Travelling Wave Motor[J]. International Journal.Non-Linear Mechanics,1996,31(6):915-924.
[8]劉錦波,陳永校.超聲波電機(jī)定轉(zhuǎn)子接觸的摩擦傳動模型及其實(shí)驗(yàn)研究[J].中國電機(jī)工程學(xué)報,2000,20(4):59-63.
[9]曲建俊,孫鳳艷,田秀.粘彈性接觸層在定子表面的行波超聲電動機(jī)接觸模型[J].機(jī)械工程學(xué)報,2006,42(12):175-179.
[10]龔中良,黃平.基于非連續(xù)能量耗散的滑動摩擦系數(shù)計算模型[J].物理學(xué)報,2011,60(2):383-388.
[11]龔中良,黃平.基于熱力耦合的滑動摩擦系數(shù)模型與計算分析[J].華南理工大學(xué)學(xué)報(自然科學(xué)版),2008,36(4): 10-13.
[12]Michele Ciavarella,Paolo Decuzzi.The State of Stress Induced by the Plane Frictionless Cylindrical Contact.Ⅱ. The Case of Elastic Similarity[J].International Journal of Solids and Structures,2001,38(26-27):4507-4523.
(編輯 丁 罡)
In cross-type multi-DOF Ultrasonic Motor,the drive mechanisms are different when the rotor rotates around X axis and Y axis or rotates around Z axis.So that they should be treated separately in accordance with the elastic contact theory and a model is established to analyze the frictional contact of the motor.The established model is used to estimate the mechanical properties of the cross-type multi-DOF ultrasonic motor and analyze the regular pattern involving the impact of the stator amplitude,the friction factor and driving frequency to the output performances of the motor.The test results of the mechanical properties of the prototype show that,The established model is valid for prediction of the characteristics of cross-type multi-DOF ultrasonic motor,it may provide guidance in design of the cross-type multi-DOF ultrasonic motor.
Multi-DOF Ultrasonic Motor Contact Model Simulation Analysis Mechanical Properties
TH122;TM356
A
1000-4998(2015)10-0006-06
*國家自然科學(xué)基金資助項目(編號:51305248)
上海市自然科學(xué)基金資助項目(編號:13ZR1416900)
上海大學(xué)創(chuàng)新基金資助項目(編號:SDCX 2012025)
2015年4月
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
