擴展二型模糊系統(tǒng)在飛機故障檢測中的應用
2015-11-24 10:16:35孫曦浩
科技創(chuàng)新導報 2015年26期
關鍵詞:故障診斷
孫曦浩
摘 要:隨著二型模糊邏輯系統(tǒng)的蓬勃發(fā)展,在各個領域有著廣泛的應用。該文在擴展二型模糊集合的基礎上,提出了擴展二型模糊系統(tǒng),并給出相應的設計算法。考慮到擴展隸屬函數(shù)取值范圍的增加,可將系統(tǒng)殘差輸出劃分為正常、異常和故障三個狀態(tài)。新增加的異常狀態(tài)可以得到更為清晰的診斷結果,能有效的避免誤診和漏診。針對非線性飛機模型,仿真結果表明了該方法的有效性。
關鍵詞:二型模糊集合 故障診斷 擴展二型模糊系統(tǒng)
中圖分類號:TP273 文獻標識碼:A 文章編號:1674-098X(2015)09(b)-0093-03
Application of expanded type-2 fuzzy system in aircraft fault detection
Sun Xihao
(Wuxi Lake Tai College, Wuxi Jiangsu, 214000, China)
Abstract:With the vigorous development of the type-2 fuzzy logic system,numerous applications are used in various fields. In this paper,we proposed expanded type-2 fuzzy system based on expanded type-2 fuzzy set.Moreover,corresponding design algorithm is given.As we added negative values to the membership function,the residual error outputs could be clearly divided into three statuses:normal,abnormal,fault.The increase of new state could present more clear results,which effectively avoid misdiagnosis and missed diagnosis.The simulation of aircraft indicates efficiency of method.
Key Words:Type-2 fuzzy sets;Fault diagnosis;Expanded type-2 fuzzy system
故障診斷是自動控制中熱點研究方向[1],它是系統(tǒng)有效性和可靠性的先決條件。一型模糊邏輯系統(tǒng)已成功應用于容錯控制與故障診斷[2-4],而其主要方法是利用模糊集合來表示殘差或觀察器,通過殘差自適應方法[5]、滑模觀察器[6]、模糊分類器[7]等解決故障診斷問題。但目前的模糊故障診斷方法,只考慮根據(jù)故障征兆來肯定故障的程度,而沒有考慮故障征兆從而否定故障。另外,在描述故障特征時,由于含有大量的不確定性和采用語言變量的描述困難,使得隸屬函數(shù)的設計也存在一定困難。二型模糊系統(tǒng)的提出有效地解決了隸屬函數(shù)的設計難度,而且能夠描述更高層次的不確定性[8]。近年來,越來越多的學者投身于二型模糊系統(tǒng)的研究,并將其應用于通信、金融、控制及醫(yī)療等各個領域[9-12]。該文根據(jù)擴展二型模糊邏輯系統(tǒng),增加擴展隸屬函數(shù)取值范圍,將系統(tǒng)殘差的輸出清晰的劃分為三個狀態(tài):正常、異常和故障。新增加的狀態(tài),能夠有效的避免誤診和漏診。針對某非線性飛機模型的仿真結果表明了其有效性。
1 擴展二型模糊系統(tǒng)
擴展二型模糊系統(tǒng),是在二型模糊系統(tǒng)的基礎上,將二型模糊系統(tǒng)中前件和后件的二型模糊集合,用擴展的二型模糊集合替換,而相應的運算方法不變,不同的是二型模糊集合的隸屬函數(shù)是區(qū)間上的常規(guī)隸屬函數(shù),而擴展的二型模糊集合的隸屬函數(shù)是區(qū)間上的擴展的一型隸屬函數(shù)[13]。
考慮p個輸入和一個輸出的擴展二模糊系統(tǒng),使用單點模糊化,重心去模糊的降型方法[13-14]和If-Then規(guī)則的如下形式:
:if is and is and … and is then is
則:
(1)
其中:和分別是擴展的二模糊集合;表示第條規(guī)則后件模糊集合的重心;。是區(qū)間的擴展隸屬函數(shù)。
由于該系統(tǒng)是在常規(guī)模糊系統(tǒng)中,將控制規(guī)則的前件和后件取為擴展的二型模糊集合,隸屬函數(shù)采用區(qū)間型。
在利用常規(guī)的隸屬函數(shù)進行故障診斷時,診斷的結果只有兩個:正常和故障兩狀態(tài),另外,由于故障特征的提取存在許多不確定性,利用擴展的二型模糊集合進行診斷時,診斷結果是具有三個狀態(tài):正常、異常和故障。可以有效的避免誤診或漏診。
將擴展的二型模糊集合引入故障診斷系統(tǒng),建立基于擴展二型模糊系統(tǒng)的故障診斷系統(tǒng)。
假設diag,是執(zhí)行器故障矩陣,并且滿足;則
(1)時,表示系統(tǒng)正常的程度為(正常);
(2)時,表示系統(tǒng)不正常(異常);
(3)時,表示系統(tǒng)故障的程度為(故障)。
其中,。
為了應用上的方便,將模糊規(guī)則中的前件和后件中的擴展的二型隸屬函數(shù)設置為中的一型區(qū)間函數(shù),此時(1)式簡化為:
(2)
權重:
(3)
其中,均屬于區(qū)間。,假設此處的隸屬函數(shù)均為區(qū)間數(shù),實際計算中每次只需兩個集合。
擴展的二模糊系統(tǒng)的設計方法是在二模糊系統(tǒng)的設計步驟上,用擴展的二型模糊集合代替二型模糊集合,模糊系統(tǒng)的設計算法相應修改如下[15]:
令,,
(),按照都取右端點的方法,即令:,不失一般性,假設排序如下:;
令對(,),用(3)式計算:
;
求使;
令和,用(3)式計算;
判斷:若成立,則停止,否則到(f)。
令,go to (b)。
2 仿真實例
該文所采用的數(shù)據(jù)來源于某非線性飛機模型的輸出數(shù)據(jù)。設定飛機飛行高度為5000m,飛行馬赫數(shù)為0.6,設置采樣時間為0.012 s。采集如下數(shù)據(jù)源:正常狀態(tài)數(shù)據(jù),右副翼卡死在-20°、-8°、-16°、…、-4°、、、、、、…、16°、18°、20°數(shù)據(jù),右副翼損傷10%、15%、20%、…、90%、95%、100%的數(shù)據(jù),右平尾卡死在、-10°的數(shù)據(jù),右平尾損傷20%、50%、100%的數(shù)據(jù),方向舵損傷100%的數(shù)據(jù),總共6種狀態(tài)數(shù)據(jù),共945組采樣數(shù)據(jù)。每組采樣數(shù)據(jù)有攻角(Alpha)、側滑角(Beta)、滾轉角速度(Wx)、俯仰角速度(Wz)、偏航角速度(Wy)、偏航角(Psi)、俯仰角(Theta)和滾轉角(Gamma)共8個變量。
設某型殲擊機結構故障診斷技術指標如下。
(1)故障診斷靈敏度。損傷:≥20%;卡死:≥1度。
(2)故障診斷精度。(范圍精度)
右副翼卡死:~±20°≥90%
右副翼損傷:20%~100%≥90%
右平尾卡死:和-10°≥90%
右平尾損傷:20%、50%和100%≥90%
方向舵損傷:100%≥90%
對某殲擊機構造如下的決策表,
其中表示不同殲擊機結構故障狀態(tài);,其中表示條件屬性,分別定義為攻角(Alpha)、側滑角(Beta)、滾轉角速度(Wx)、俯仰角速度(Wz)、偏航角速度(Wy)、偏航角(Psi)、俯仰角(Theta)和滾轉角(Gamma);表示決策屬性,分別定義為無故障、右副翼卡死、右副翼損傷、右平尾卡死、右平尾損傷和方向舵損傷。
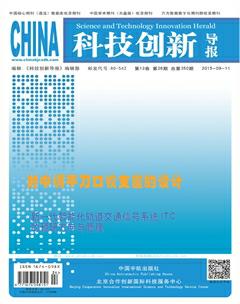
2.1 右單平尾卡死-5?故障認定仿真
1.0為正常飛行狀態(tài)標志位,-1.0為故障狀態(tài)標志位。最初,可以觀測到正常飛行狀態(tài)標志位為1,其余標志位均為0,表明飛機處于正常飛行狀態(tài)。經(jīng)過一個瞬時振蕩,正常飛行狀態(tài)標志位為0,右平尾升降舵卡死故障狀態(tài)標志位為-1,其余標志位均為0,表明飛機右平尾升降舵出現(xiàn)卡死故障。同時顯示出右平尾升降舵卡死位置在-4.47?至-5.38?之間,仿真時段內(nèi)平均值為-4.99。
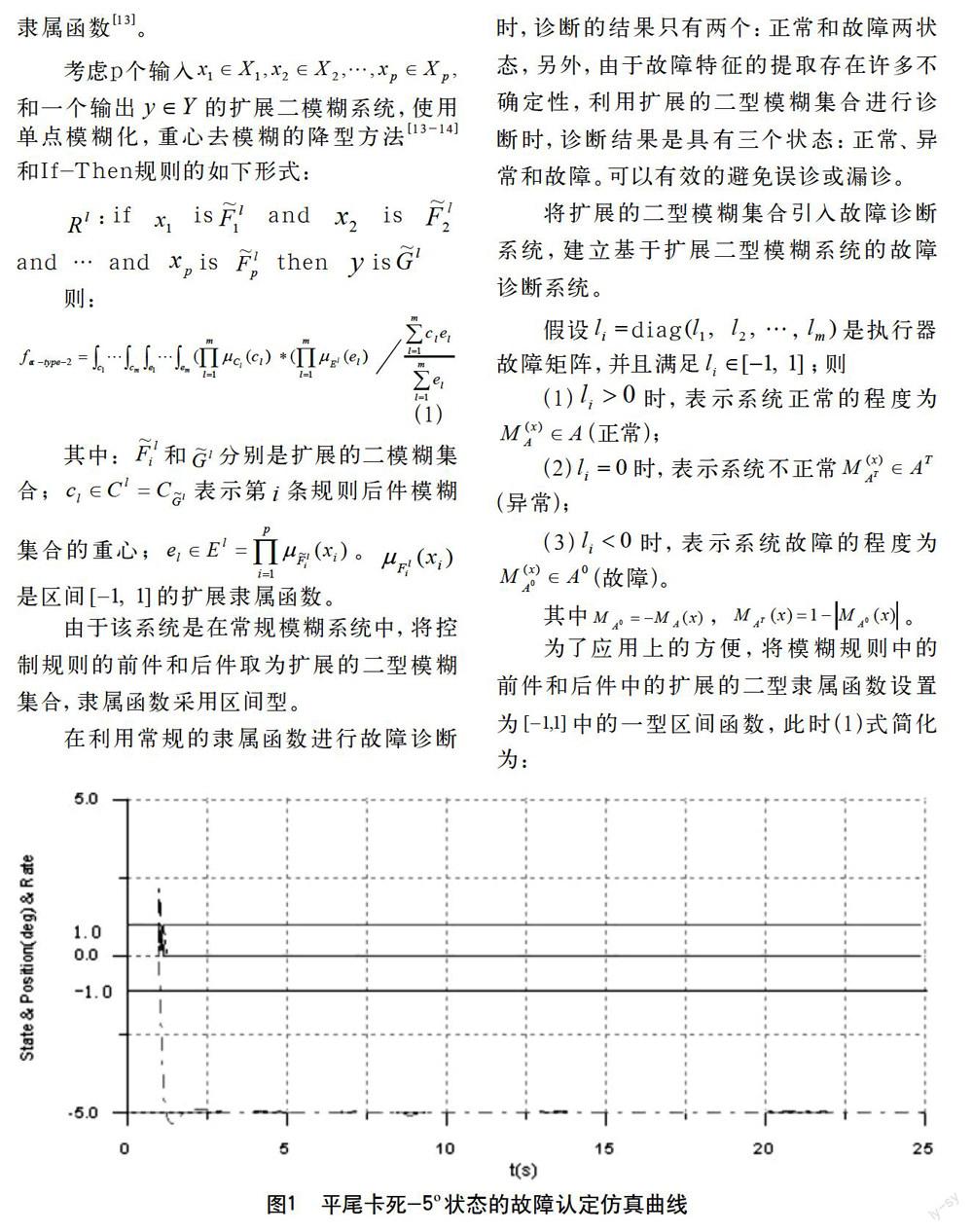
2.2右單平尾卡死-10?故障認定仿真
初始,可飛機處于正常飛行狀態(tài)。經(jīng)過一個瞬時振蕩,正常飛行狀態(tài)標志位為0,右平尾升降舵卡死故障狀態(tài)標志位為-1,其余標志位均為0,表明飛機右平尾升降舵出現(xiàn)卡死故障。同時顯示出右平尾升降舵卡死位置在-9.71?至-10.00?之間,仿真時段內(nèi)平均值為-9.99?。
2.3 右單平尾折斷50%故障認定仿真
初始,可以觀測到正常飛行狀態(tài)標志位為1,其余標志位均為0,表明飛機處于正常飛行狀態(tài)。經(jīng)過一個瞬時振蕩,正常飛行狀態(tài)標志位為0,右平尾升降舵損傷故障狀態(tài)標志位為-1,其余標志位均為0,表明飛機右平尾升降舵出現(xiàn)損傷故障。同時顯示出右平尾升降舵損傷比例在17.67%至49.08%之間,仿真時段內(nèi)平均值為49.03%。
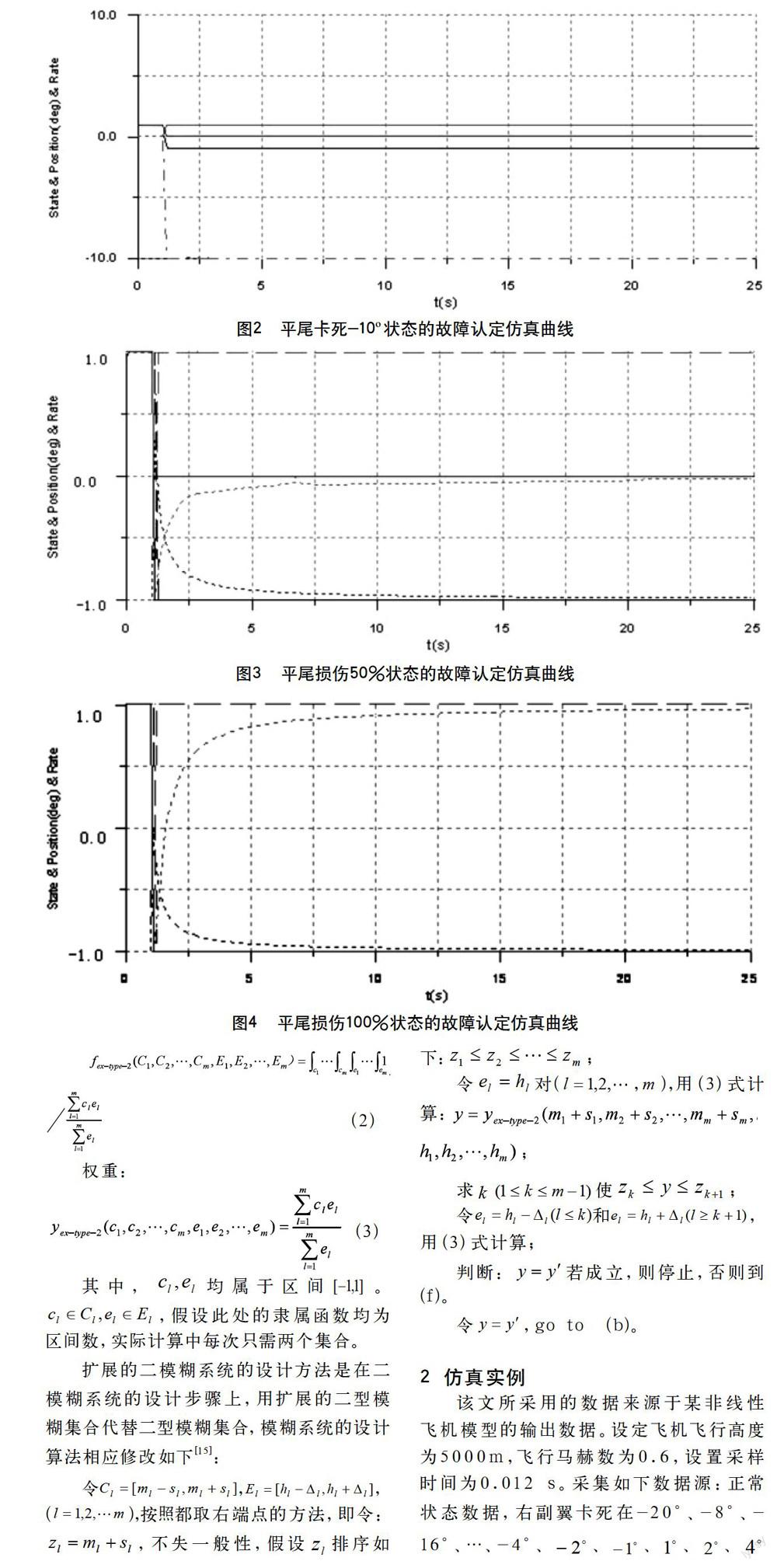
2.4 右單平尾折斷100%故障認定仿真
初始,飛機處于正常飛行狀態(tài)。經(jīng)過一個瞬時振蕩,正常飛行狀態(tài)標志位為0,右平尾升降舵損傷故障狀態(tài)標志位為-1,其余標志位均為0,表明飛機右平尾升降舵出現(xiàn)損傷故障。同時顯示出右平尾升降舵損傷比例在17.42%至98.76%之間,仿真時段內(nèi)平均值為98.76%。
3 結語
該文在二型模糊系統(tǒng)的基礎上,結合擴展二型模糊集合,提出了擴展二型模糊系統(tǒng),并用于非線性飛機模型的故障診斷。擴展隸屬函數(shù)增加了負值,相比于傳統(tǒng)模糊系統(tǒng)的結果,提供了更多的輸出信息,有效的避免了誤診和漏診。
參考文獻
[1] 周東華,王慶林.基于模型的控制系統(tǒng)故障診斷技術和最新進展[J].自動化學報,1995,21(2):224-247.
[2] Bennett S M,Patton R J,Daley S.Sensor fault-tolerant control of a rail traction drive[J].Control Engineering Practice,1999(7):217-225.
[3] Shields D N.Observer design and detection for nonlinear descriptor systems[J].International Journal of Control,1997,67(2):153-168.
[4] Lopez C J, Patton R J,Daley S.Takagi-Sugeno Fuzzy Fault-Tolerant Control of an Induction Motor[J].NeuraComputing&Applictions,2000(9):19-28.
[5] Schneider H,F(xiàn)rank P M.Fuzzy logic based threshold adaption for fault detection in robots[C]//Proc 3rd IEEE Conf Control Applications,1994:1127-1132.
[6] Edwards C,Spurgeon S K,Patton R J,et al.Sliding mode observers for fault detection[C]//Proc IFAC SAFEPROCESS97,1997:522-527.
[7] Andre L,Walmir C,F(xiàn)ernando G. Adaptive fault detection and diagnosis using an evolving fuzzy classifier[J].Information Sciences,2013(220):64-85.
[8] Mendel J M,John R I.Type-2 fuzzy sets made simple [J].IEEE Transactions on Fuzzy Systems,2002,10(2):117-127.
[9] Liang Q,Mendel J M.MPEG VBR video traffic modeling and classification using fuzzy techniques[J].IEEE Transactions on Fuzzy Systems,2001,9(8):183-193.
[10] Hernandez M,Mendez G M. Modelling and prediction of the MXNUSD exchange rate using interval singleton type-2 fuzzy logic systems [J].IEEE Computational Intelligence Magazine,2007,2(1):5-8.
[11] John R I,Innocent P R,Barnes M R.Type-2 fuzzy sets and neuro-fuzzy clustering of radiographic Tibia Images[C]//IEEE International Conference on FuzzySystems,Anchorage,AK,1998:1373-1376.
[12] Hani A,Hagras A.Hierarchical type-2 fuzzy logic control architecture for autonomous mobile robots [J].IEEE Transactions on Fuzzy Systems,2004,12(4):524-539.
[13] Karnik N K,Mendel J M, Liang Q.Type-2 fuzzy logic systems [J].IEEE Transactions on Fuzzy Systems,1999,7(6):643-658.
[14] Liang Q,Mendel J M.nterval type-2 fuzzy logic systems [C]//IEEE International Conference on Fuzzy Systems,1999:643-658.
[15] 李莉,李醫(yī)民,孫玉坤.基于擴展Type-2模糊集的故障診斷方法[J].系統(tǒng)工程與電子技術,2008(30):2280-2283.
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00