裝有橫向穩定器的車輛懸架系統Simulink振動分析
2015-12-03 12:20:40王愛國倪晉挺
噪聲與振動控制 2015年2期
李 琤,王愛國,倪晉挺
(安徽機電職業技術學院 汽車工程系,安徽 蕪湖 241000)
裝有橫向穩定器的車輛懸架系統Simulink振動分析
李 琤,王愛國,倪晉挺
(安徽機電職業技術學院 汽車工程系,安徽 蕪湖 241000)
以某款轎車的橫向穩定器為研究對象,研究其在行駛過程中對車輛側傾性能的影響。首先建立裝有橫向穩定器的四自由度的車輛懸架系統數學模型,采用Matlab/Simulink工具箱進行仿真分析。然后以隨機路面激勵和穩定器剛度系數作為輸入量,以汽車懸架的質心速度、側傾角速度和懸架的變形作為輸出量。通過對比仿真曲線,得知裝有橫向穩定器的懸架系統與無橫向穩定器的懸架系統相比,車身側傾角度減小,操縱穩定性和行駛安全性有一定程度的改善。
振動與波;橫向穩定器;四自由度;剛度系數;Matlab/Simulink
現代轎車為了獲得良好的行駛平順性,懸架的垂向剛度一般設計的較低。為了提高懸架的側傾角剛度,減小橫向傾斜,常在懸架裝置中添加橫向穩定器。橫向穩定器是汽車獨立懸架系統的重要安全件,其主要作用是在汽車轉彎或者遇到阻力時,給懸架提供足夠的側傾剛度,保證良好的操縱穩定性。
穩定器由彈簧鋼制成,一般呈U型。其兩側縱向部分的末端通過連接桿以球鉸方式與減振器外殼相連接,中部自由支撐在兩個固定于副車架上的橡膠襯套內,如圖1所示[1]。
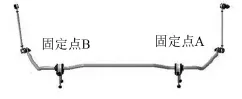
圖1 汽車穩定器結構
車輛行駛中,如果左、右車輪同向跳動且跳動量一致,則穩定器兩端點的運動軌跡相同,穩定器本身不發生扭轉變形;如果左、右車輪的同向跳動量不一致或反向跳動,則穩定器本身發生一定角度的扭轉變形來抵抗左、右車輪的相對跳動。
1 橫向穩定器側傾剛度
穩定器的形狀通常較為復雜,為方便表示,通常用等臂梯形來表示,如圖2所示。
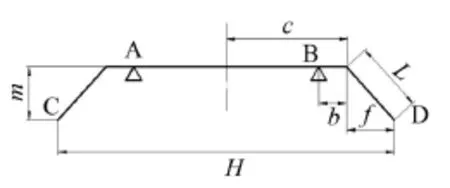
圖2 穩定器尺寸簡化模型
圖中,A、B兩點為穩定器本體與車身的鉸接點。L,b,H,c,m,f均為穩定器臂長尺寸;δ為等直徑系數,等直徑穩定器δ=1;d為穩定器直徑;λ為穩定器設計極限端跳。
利用材料力學及幾何關系,橫向穩定器的側傾剛度,可以使用式1求解

某款A級轎車橫向穩定器尺寸如表1所示。
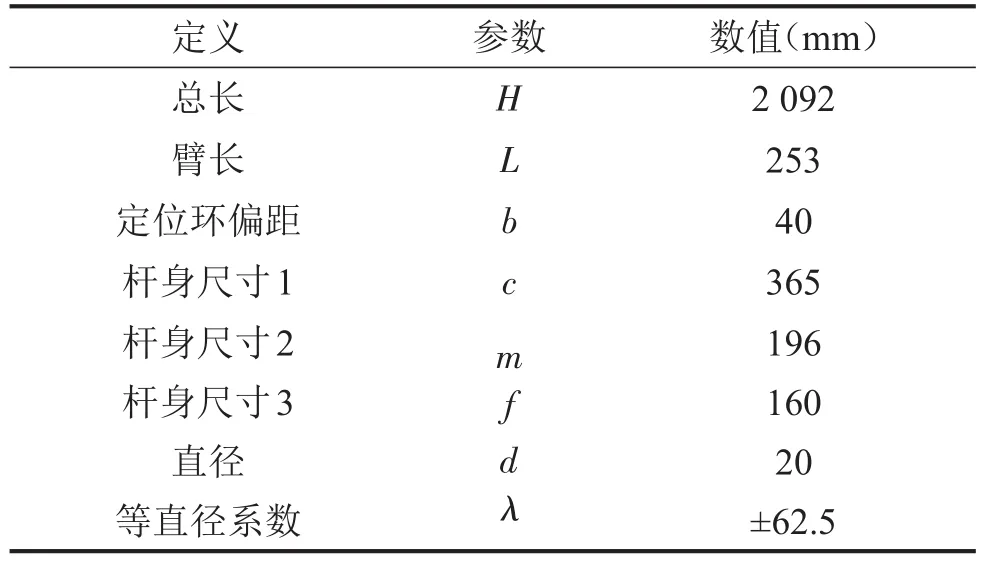
表1 某款橫向穩定器尺寸
通過計算可得,此款橫向穩定器的剛度為
Kroll=45.5 N/mm。
2 裝有橫向穩定器懸架系統振動模型
圖3所示為裝有橫向穩定器的四自由度1/2車輛懸架系統模型。

圖3 有橫向穩定器的四自由度1/2車懸架系統模型
本文通過對1/2車量懸架系統振動模型建立微分方程[2],分析汽車在側傾時,橫向穩定器對懸架側傾角度的影響。在這個振動模型中,作如下假設:
(2)懸架系統為線性系統,非簧載質量包括前軸(含橫向穩定器)及前輪的質量,視為具有集中質量的剛體。輪胎被簡化為一個彈簧,忽略其阻尼,行駛過程中始終與地面接觸。
在有橫向穩定器的懸架系統模型建立中運用拉格朗日法[3]。
系統的總動能

通過計算可得A、B、C、D四個矩陣。

表2 微分振動方程參數說明
3 運用Matlab/Simulink仿真分析
3.1 相關參數及路面輸入
(1)采用某A級轎車懸架的結構參數進行仿真分析,如表3所示。
表3 某款A級轎車懸架仿真參數
(2)路面輸入
仿真采用車輛以v=20m/s速度駛過指定路面。城市工況中,一般采用B級瀝青路面,路況平整良好。在考察橫向穩定器時,采用會引起較大運動的路面,能更好的分析橫向穩定器的效果,因此選用E級卵石路面。Gq(n0)為參考空間頻率n0下的路面功率譜密度值,稱為路面不平度系數,單位為m2/m-1,其中n0=0.1 m-1。表4給出B、E級路面相關參數。
表4 B級和E級路面激勵參數
隨機路面輸入采用由一白噪聲模塊通過一積分器產生。已知路面功率譜密度公式為

其中ω(t)為均值為0的高斯白噪聲,f0為下截止頻,f0=0.1Hz。路面位移系數-2πf=-0.628。ω(t)的增益受到Gq(n0)和v的影響,針對B、E級路面的增益計算得到

搭建白噪聲路譜Simulink模型如圖4所示。
圖4 白噪聲路譜Simulink模型
通過仿真可以得到B級路面激勵和E級路面激勵。其中E級路面激勵輸入的仿真信號如圖5所示。
圖5 E級路面激勵的時域仿真結果
3.2 仿真結果分析
Simulink仿真模型的輸出向量Y中的參數φ˙,表示側傾運動時車身繞x軸轉過的角速度。對其進行積分計算,可以得到側傾角度φ。車輪同向跳動時,穩定桿不起作用,側傾角度φ=0,設置輸入向量U中的Frolll=Frollr=0。車輪異向跳動時,穩定器的端部受力和側傾角度φ相關。將φ設置為閉環控制中的反饋參數,用以抑制懸架的側傾趨勢。同時,輸入端處加入隨機路譜來測試系統的性能,初始模型中采用城市主要工況B級路面。有穩定器的懸架系統模型所建立的Simulink模型[5,6]如圖6所示。
通過對側傾角速度的積分,得到的側傾角度φ的輸出曲線,如圖7所示。取側傾角度的平均值為0.025 rad。換算成角度為1.439 deg。滿足汽車城市工況轉彎行駛時,側傾角度一般應當在1 deg~3 deg范圍內。側傾時,求得穩定器端部受力:

因此可以將穩定器的控制因素視作PID控制中的比例因數[7]。其中,K系數與穩定器的剛度Kroll有關,K系數反映的是穩定器端部跳動與整車側傾的關系。根據前文此款轎車的穩定器結構參數,可以帶入計算得到

圖6 有穩定器的懸架系統Simulink模型


圖7 城市工況車身側傾角度仿真曲線
已知由于單純的比例控制會導致系統發散,所以增加積分和微分控制圖形的輸出,這也是目前半主動懸架的發展趨勢[8]。
最后,采用路況較差的E級卵石路譜來對比分析橫向穩定器性能。對比模型中輸入為E級路譜,控制力F穩≡0。仿真時間取10 s。分別得到無穩定器的懸架系統和有穩定器懸架系統的車身質心速度、車身側傾角度等時域響應曲線。對于穩定器的作用主要考察側傾角度的仿真曲線。仿真結果如圖8所示(粗線為有穩定桿,細線為無穩定桿):

圖8 卵石E級路面車身側傾角度對比仿真曲線
從圖8和表5中對比可知,在較差的路況下(如卵石路面),有穩定器的懸架系統比無穩定器懸架系統的車身側傾角度架明顯降低,峰值降幅為57.1%,均值的降幅達到45.0%,這說明橫向穩定器在較差路況中,有效削減了車身側傾振動,一定程度上提高了車輛操縱穩定性和行駛安全性。
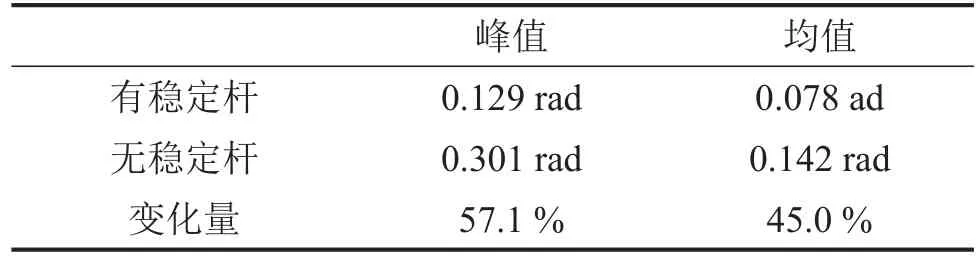
表5 車身側傾角度對比
4 結語
(1)裝有橫向穩定器的汽車懸架系統,相對于無橫向穩定器的懸架系統,在汽車行駛過程中可以減小車身側傾角度,增加車輛的操縱穩定性和行駛安全性。
(2)利用拉格朗日法建立運動模型,計算過程中參數求解更為準確。利用狀態方程獲取矩陣系數,在Matlab/Simulink建立系統模型進行仿真分析,有效模擬在白噪聲路面激勵下,裝有橫向穩定器對車身側傾角度的影響。
(3)根據橫向穩定器的尺寸結構,可以計算其剛度代入Simulink模型,實現閉環反饋控制。在設計之初可以通過穩定器的彎曲角度和臂長對其剛度做適當調整,同時也會影響Simulink模型中K系數的取值。
(4)在實際運用中對被動懸架增加控制系統十分必要,目前汽車懸架系統中已經提出可控的主動橫向穩定器[9],通過智能控制達到更加有效的控制效果。
[1]廖芳,王承.橫向穩定桿建模方法研究[J].汽車技術,2006,7:5-8.
[2]張廟康,胡海巖.車輛懸架振動系統研究的進展[J].振動測試與診斷,1997,17(1):7-15.
[3]朱明.汽車半主動懸架系統的建模研究[D].重慶:重慶大學,2004.
[4]余志生.汽車理論(第3版)[M].北京:機械工業出版社,2000,10:170-213.
[5]張德豐.MATLAB/Simulink建模與仿真[M].北京:電子工業出本社,2009:53-86.
[6]夏瑋,李朝暉,常春藤.控制系統仿真與實例詳解[M].北京:人民郵電出版社,2008,11:262-292.
[7]趙強,楊亞珣.車輛磁流變座椅懸架的模糊自適應整定PID控制[J].噪聲振動與控制,2009,4:106-109.
[8]貝紹軼,趙景波,劉勺華.車輛半主動懸架系統平順性聯合仿真分析[J].噪聲振動與控制,2010,6:87-90.
[9]丁義蘭.汽車主動式橫向穩定桿技術研究[D].南京:南京理工大學,2014.
VibrationAnalysis of a Vehicle Suspension System with an Anti-roll Bar by Matlab/Simulink Simulation
LI Cheng,WANG Ai-guo,NI Jin-ting
(Department ofAutomobile Engineering,Anhui Technical College of Mechanical and Electrical Engineering,Wuhu 241000,Anhui China)
Influence of the anti-roll bar on the roll performance of a vehicle was studied.A four-DOF mathematical model of the suspension system of the vehicle with an anti-roll bar was established.Simulation of the model was carried out by means of Matlab/Simulink.In the simulation,the response curves under random road-profile excitation and the stiffness coefficient of the anti-roll bar were given as the input.The response curves of the body vertical velocity,the body roll angle and the suspension dynamic deflection were obtained.Compared with those without anti-roll bars,the simulation results show that the body roll angle is reduced obviously by using the anti-roll bar.Meanwhile,the vehicle handling stability and ride comfort are improved.
vibration and wave;anti-roll bar;four-DOF;stiffness coefficient;Matlab/Simulink
U467.4+92
A
10.3969/j.issn.1006-1335.2015.02.015
1006-1355(2015)02-0061-04
2014-07-30
李琤(1986-)女,安徽蕪湖人,碩士,主要從事汽車底盤設計及相關教學工作。E-mail:licheng_nefu@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50