應用STM32的車載呼救終端設計
2015-12-06 07:50:54史雪林陸穎
重慶理工大學學報(自然科學) 2015年6期
肖 文,史雪林,江 洪,陸穎
(江蘇大學 a.計算機科學與通信工程學院;b.機械工程學院;c.汽車與交通工程學院,江蘇 鎮江 212013)
車輛緊急呼救終端系統[1]可以在車輛發生事故后將碰撞時的車速、地理位置、駕駛員信息等相關信息進行整合,并送至呼救中心,便于救援人員及時了解事故車輛信息,展開救援。在車輛意外拋錨時,駕駛員亦可通過該終端發出求援信息,因此,車輛緊急呼救終端系統對于行車安全具有重要意義。在車輛緊急呼救終端系統中的關鍵是事故檢測識別技術,即通過檢測車輛發生事故時的視頻、噪音、碰撞等事故特征信號以判斷車輛事故是否發生[2-3]。國外開發的系統是通過安全氣囊系統自動觸發或者用人工按鈕來(實現觸發,并報告車輛位置、車主身份及車輛碰撞速度等信息[4-6]。但由于碰撞角度、碰撞力等原因,在發生嚴重事故時,由于安全氣囊未能彈出,導致車輛緊急呼叫系統未能自動觸發的情況時有發生[7-8]。本研究提出以加速度信號作為事故特征信號的車載呼救系統終端設計方案,并進行了軟、硬件設計,最后通過實驗驗證了該終端系統的可行性。
1 車載終端工作原理及整體結構設計
車載呼救系統終端通過加速度傳感器實時采集車輛加速度信息,控制系統對采集到的加速度數據進行實時處理、計算與存儲[9],并通過觸發算法判斷計算值是否超過預設閾值,由此檢測事故的發生,并決定是否向呼救中心發送信息。
如圖1所示,車載呼救終端的傳感器輸出的電壓信號經過信號調理后輸入至后級控制器,通過降壓、濾波與A/D轉換等處理將模擬信號轉換成車載終端控制器可以處理的數字信號,便于控制系統采樣。控制系統對數據進行存儲、處理等[10]。
車載呼救終端分為事故檢測模塊和呼救模塊。事故檢測模塊主要負責采集車輛加速度實時數據、圖像信息及車身內部數據信息。如圖2所示,事故檢測模塊主要由加速度傳感器、嵌入式微處理器、射頻模塊、攝像頭、CAN總線通信接口及SD卡模塊組成。

圖1 數據采集系統工作框圖
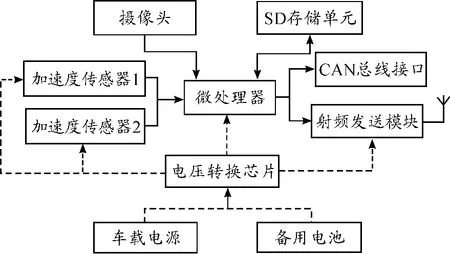
圖2 事故檢測模塊結構示意圖
呼救模塊主要負責接收事故檢測模塊發送的車輛碰撞數據信息,根據需求提取車輛位置信息,將信息整理、編碼后通過GPRS網絡發送至呼救中心,或者通過手動按鈕發送求助信息,同時駕駛員亦可通過麥克風等設備與救助中心進行語音通訊,便于救助中心了解詳情。如圖3所示,呼救模塊主要由嵌入式微處理器、射頻模塊、定位模塊、通信模塊等單元組成。
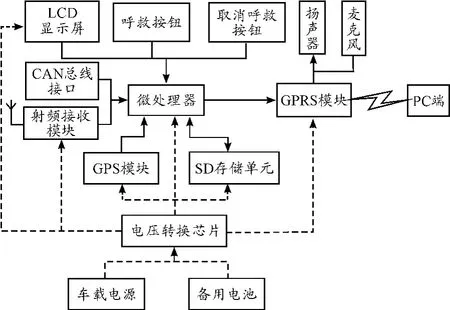
圖3 呼救模塊結構示意圖
事故檢測模塊采集車輛加速度信息,經過處理器處理后,如果檢測到事故的發生,則通過無線射頻模塊將車輛加速度、速度、圖像等信息發送到呼救模塊,呼救模塊再整合車輛位置、圖像、駕駛員等相關信息,將其編碼,通過無線通信模塊將呼救信息發送到呼救中心。呼救中心則利用相關信息迅速定位事故地點,同時亦可與車內乘員進行語音通話,了解乘員傷害程度,預測事故嚴重程度,并準備救援。
2 車載終端硬件設計
2.1 STM32F107VC片上資源
終端控制芯片選用ST公司的低功耗32位處理器 STM32F107VCT作為核心芯片[11]。該芯片集成了各種高性能的工業標準接口,且其不同型號產品在引腳和軟件上具有兼容性,便于多種應用。該芯片含有10個定時器、2個12位D/A(數模轉換器)、2個IIC接口、5個USART接口和3個SPI接口及高質量數字音頻接口IIS等。此外,STM32F107芯片還擁有全速USB(OTG)接口、兩路CAN2.0B接口,以及以太網10/100MAC模塊和2個12位A/D(模數轉換器)通道,可進行單次或連續轉換模式,轉換時間低至1 μs。同時芯片具有豐富的存儲資源——256kB Flash及 64kB RAM,無需外接存儲設備即可滿足多種行業的應用要求[12]。
2.2 加速度采集模塊設計
系統終端選用SILICON DESIGNS公司的2210單軸加速度計作為加速度傳感器。該傳感器能夠將電源電壓變化造成的影響最小化,具有對溫度變化和熱梯度不敏感等特性,通過A/D接口與STM32F107芯片連接,其電路如圖4所示。AOP為加速度傳感器輸出接口,經 R9、R10、C19構成的分壓濾波電路處理后,通過MCP6042輸出端VA輸入到STM32 AD通道,輸出信號電壓范圍為0~3 V。
2.3 CAN通訊模塊設計
為了便于采集車輛內部相關數據,設計CAN通訊總線接口接入車輛內部數據入口,如圖5所示。接口通過CAN總線收發芯片vp230與STM32微處理器的CAN引腳PA11、PA12連接,實現其數據傳輸功能。用跳線在CANH于CANL之間外接終端電阻,消除信號反射,并通過瞬態穩壓二極管D9、D10實現過電壓保護。利用電容C29、C30及共模扼流圈L2抑制噪聲信號,同時提高了EMI能力。
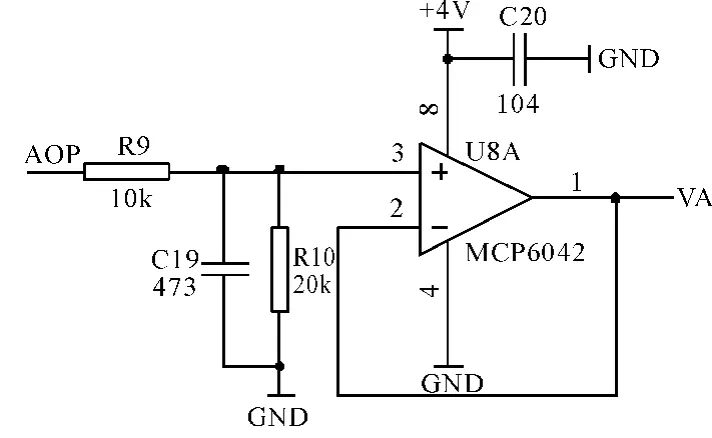
圖4 加速度傳感器電路
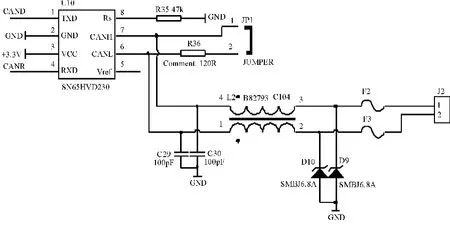
圖5 CAN模塊電路
2.4 GPS模塊設計
GPS模塊選用U-Blox公司的NEO-6M芯片作為核心芯片,經匹配電阻R10、R11通過串口與STM32F107芯片連接,其串口引腳為TTL電平。可直接與STM32F107芯片連接,用于接收車輛位置、時間等信息,電路原理如圖6所示。電源輸入引腳并聯大電容C9,使輸入電壓更加穩定。
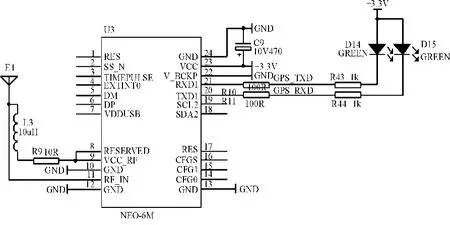
圖6 GPS電路原理
2.5 GPRS 模塊設計
GPRS模塊選用SIMCOM公司的sim900a芯片作為GPRS模塊的核心芯片,經過匹配電阻R15、R16通過串口與STM32F107芯片連接,其串口引腳同樣為TTL電平,用于與呼救中心之間信息傳輸,其電路原理如圖7所示。選用8引腳卡座Sim carrier進行設計[13],卡座電源由 SIM900a芯片直接提供。為減少信號紋波,降低干擾,提高SIM卡部分的穩定性,在SIM卡復位、時鐘、數據輸入、輸出引腳中分別旁路ESD管器件。

圖7 GPRS電路原理
3 車載終端軟件設計
系統軟件在keil環境下運行,使用C語言進行開發,設計及編寫各接口、外設的初始化驅動程序以及呼救觸發算法。
1)系統程序初始化設計。包括時鐘、定時器的初始化設置,輸入輸出接口及串口初始化設計,以及數據處理及發送程序的設計。
2)觸發算法設計。系統終端采取兩種觸發方式:手動觸發和自動觸發。當事故輕微或車輛意外拋錨需要救助時,可通過手動觸發方式實現求助。當車輛發生嚴重事故時,終端自動觸發呼救任務。終端事故檢測模塊使用移動窗式積分法作為碰撞事故的檢測算法,首先確定一個時間長度t作為窗口寬度,當窗寬在加速度曲線上移動時,求出窗寬內加速度曲線的積分值,將該值與預設的閾值對比,判斷是否發生事故。
3)接口數據傳輸任務。微處理器通過A/D接口讀取并處理加速度信息。通過SPI接口實現射頻模塊信息的接受與處理,并將信息存儲于SD卡中。通過相應的串口讀取并處理攝像頭模塊的圖像信息。
4)GPS地理位置信息解碼任務。當接收到串口發送的GPS數據時,調用相關函數進行數據的解析、處理,將信息以特定的格式輸出,提取出需要的信息,因GPS模塊主要獲取地理位置、時間、車速等信息,故選用“$GPRMC”格式語句[14-15]。
5)GPRS任務。呼救信息發送通過GPRS網絡實現。微處理器通過AT指令調用相關函數喚醒GPRS任務,讀取相關數據并編碼,接入Internet網絡將信息發送至呼救中心。
6)語音通信處理任務。GPRS模塊外接有揚聲器和麥克風,便于呼救中心與駕駛員進行語音通訊,以便進一步了解詳情。
系統終端任務流程如圖8所示。

圖8 終端任務流程
4 性能實驗與分析
4.1 數據采集試驗
事故檢測模塊的準確性與可靠性是系統終端實現其工作的前提。選用某型車進行實車道路加速度采集實驗。實驗過程中,利用事故檢測模塊與采集儀同時采集特殊工況下車輛加速度數據,以驗證事故檢測模塊處理數據的準確性、可靠性。同時給事故檢測模塊一個假定的觸發閾值作為判斷事故發生的條件。傳感器安裝位置如圖9所示,基座固定于副駕駛左側座椅下方滑槽處,通過調整其安裝方向實現不同方向的數據采集,分別進行急加速、過減速坎、制動等工況下的實驗。圖10為各工況下事故檢測模塊與采集儀采集的加速度曲線。實驗結果表明,3種工況下事故檢測模塊均未檢測到事故發生。根據圖10可知,事故檢測模塊采集的曲線與采集儀所采集的曲線基本吻合,但該模塊仍存在一定的誤差,可通過算法或硬件進一步消除干擾,提高該模塊采集數據的準確性及可靠性。

圖9 傳感器安裝位置
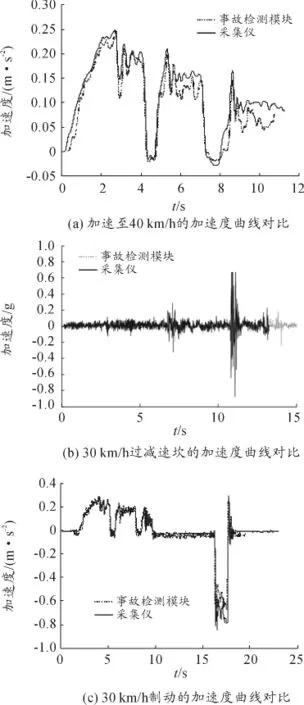
圖10 加速度曲線對比
4.2 呼救模塊模擬實驗
如圖11所示,連接好事故檢測模塊與呼救模塊相應接口,分別將其靜止放在平行桌面。事故檢測模塊預先設定一個較小的加速度閾值a,在沿加速度傳感器x方向施加一個力f。當該力產生的加速度值超過閾值a時,事故檢測模塊檢測到沖擊,并將測得的加速度信息發送至呼救模塊。呼救模塊提取GPS地理位置、時間等信息后顯示在LCD屏上,如圖12所示,并自動將信息發送至接收端。當力f產生的加速度值小于閾值a時,呼救模塊不發送呼救信息。

圖11 車載終端實物

圖12 呼救模塊LCD屏顯示的信息
5 結束語
將呼救終端分為事故檢測模塊與呼救模塊兩個模塊,可根據其具有的功能將其分別安裝在車內合適位置,在一定程度上減少了呼救終端的體積,使其安裝更加方便。
實現了事故檢測模塊與呼救模塊之間數據的無線傳輸,同時因為終端具有豐富的外設接口,可進一步豐富終端的功能。
通過加速度采集實驗及模擬實驗驗證了事故檢測模塊和呼救模塊的可靠性。該終端可實現車輛加速度數據的實時采集、處理,以及檢測事故的發生,便于上位機將呼救信息及時發送到救援中心。
[1]Cui Lu-ming,Okada K Bzunorl,Kato Toshihiko.Performance Evaluation on IEEE 802.11e Considering Emergency Calls in Congested Situation[J].The Journal of China Universities of Posts and Telecommunications,2007,14:50-59.
[2]黃河,戴碩,羅海.一種基于聲信號的車輛碰撞檢測裝置[J].電子技術,2010(8):65-67.
[3]尹春娥,陳寬民,萬繼志.基于小波方程的高速公路交通事故自動檢測方法[J].中國公路學報,2014,12(27):106-112.
[4]Boix E.Definition of a Protocol of Automatic Identification and Notification of Road Accidents and Development of an Advanced eCall System[C]//SAE 10th International Conference on Automotive Engineering.2014.
[5]Mohan R A,Chaewon B,Rob B.Evaluating the reliability of automated collision notification systems[J].Accident Analysis and Prevention,2003,35:349-360.
[6]JEONGE,OH C,LE J.Evaluation of Safety Benefits of Automatic Crash in Formation Notification Systems on Freeway[J?.AutomotiveTechnolog,2014,15(3):495-503.
[7]白中浩,白芳華,劉玉云.采用預測模式的智能安全氣囊控制算法[J].華南理工大學學報:自然科學版,2014,42(3):66-71.
[8]吳亮亮,凌旭.智能型汽車安全氣囊點火控制算法[J].重慶理工大學學報:自然科學版,2013,27(8):10-13,40.
[9]陳亞東,張金換,黃世霖.汽車碰撞試驗用車載數據采集系統的研制[J].公路交通科技,2003,20(2):135-139.
[10]武振昕,敖銀輝,曹斌.基于TMS320F2812振動信號采集系統的設計與開發[J].組合機床與自動化加工技術,2013(9):85-87,91.
[11]張旭.基于STM32電力數據采集系統的設計[J].電子測量技術,2010,33(11):90-93.
[12]林強,朱威,王雅杰.基于STM32F107的強震數據采集傳輸系統設計[J].大地測量與地球動力學,2013,33(S2):80-83.
[13]喬國鵬.基于STM32與AM1705的車載實時監控系統設計[D].成都:成都理工大學,2012.
[14]舒洪靈.基于GPS技術的車輛監控系統的設計和實現[D].成都:電子科技大學,2013.
[15]黃作維,周明,張喜梅.GPS/GPRS支持下的嵌入式車載終端的實現[J].計算機測量與控制,2009,17(11):2205-2208.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32