基于ADAMS的汽車側翻穩定性仿真分析
2015-12-07 02:54:34金智林趙曰賀
重慶理工大學學報(自然科學) 2015年10期
張 雷,金智林,趙曰賀,趙 鋒
(南京航空航天大學車輛工程系,南京 210016)
汽車側翻是一種致命的交通事故。美國國家公路交通安全管理局(NHTSA)的交通事故年度報告越來越多地關注各種類型車輛的側翻傷亡率及造成的財產損失。統計數據表明:2012年美國有561.5萬車次交通事故,汽車側翻事故占2.0%,但汽車側翻傷亡人數占交通事故傷亡人數的20.3%[1]。在我國,據公安部統計,2013年發生的特大交通事故共16起,造成的傷亡人數高達219人,其中由于汽車側翻引起的交通事故5起,造成的人員傷亡人數為77人。統計顯示,由于汽車側翻引起的人員傷亡比例高達35%。因此,汽車側翻及防翻控制的研究逐漸受到人們的重視[2-4]。
汽車側翻主要分為絆倒型側翻和非絆倒型側翻兩大類[5]。絆倒型側翻是指汽車行駛時由于路面障礙物或者路面不平度以及側向風等引起的側翻,此時汽車的水平側向力不再與各車垂向輪載荷以及路面附著系數相關,僅僅與車速、障礙物尺寸以及風速相關。非絆倒型側翻則是汽車在高速緊急的轉向過程中由較大的側向加速度引起的側翻。目前國內外對非絆倒型汽車側翻的研究較多:金智林等[6]研究了汽車側翻預警算法,基于側翻預警設計了防側翻控制策略;褚端峰等[7]運用滑模控制方法設計了半主動懸架的汽車防側翻控制器;Larish等[8]結合駕駛員轉向輸入提出了一種有預測能力的側翻評價指標,應用CarSim軟件及實驗進行了分析和驗證;Yoon等[9]進行了防側翻的汽車集成底盤控制研究,設計了一種人車閉環系統的底盤集成控制算法,用虛擬測試實驗進行了驗證。ADAMS作為一款多體動力學仿真軟件,在汽車相關的仿真中能夠有效地降低人車實驗的危險性和成本,同時能仿真駕駛員差異性等因素的影響。李志剛等[10]運用ADAMS研究了微型客車急轉彎的側翻傾向,揭示了客車結構參數、行駛參數、外部工況對側翻傾向性的影響;時曉杰等[11]基于ADAMS對汽車側翻風險影響因素進行了正交試驗,得到了影響因素的主次關系。雖然國內外對車輛本身結構與側翻之間的關系有很多相關研究,但是對于駕駛員的操作與車輛側翻之間關系的研究相對較少。
本文運用ADAMS仿真軟件對駕駛員能夠控制的車輛側翻因素進行了仿真分析,定性地得出相關因素與汽車側翻性能之間的變化規律,對汽車駕駛員的操作有著指導性意義,可為切實降低側翻事故的發生率提供科學依據。
1 汽車側翻模型及評價指標
1.1 多體動力學模型
為更加精確分析汽車側翻過程的動態性能,基于Adams/Car模塊化方法建立整車多體動力學模型。根據某SUV的特性狀況,建立前懸架、后懸架、轉向系統、制動系統及車身等子模塊的模型,然后將整車重心位置及慣性矩等難以直接獲取的參數設置為可修正參數。多體動力學模型如圖1所示。設置前后懸架為雙橫臂式,其余參數設置如表1所示。
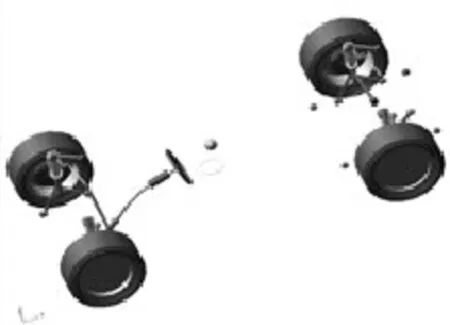
圖1 多體動力學模型

表1 某SUV車參數
1.2 側翻評價指標
為理論分析汽車側翻的評價指標,將汽車簡化為側傾平面模型,如圖2所示。

圖2 側傾平面模型
汽車在轉向時會產生側向加速度

式中:v為側向速度;u為縱向行駛速度;R為轉向半徑。
考慮到汽車左右兩側動力學特性的對稱性,假設汽車向左轉彎,則左側車輪載荷減小,右側車輪載荷增加,對右側車輪與地面的接觸點取矩,則力矩方程為

其中:m為整車質量;tw為輪距寬度;hCG為汽車重心高度;FL為左側車輪的垂向載荷。
當力矩平衡時,總力矩為0,則

可以看出:當側向加速度足夠大時,左側車輪垂向載荷變為0,即左側車輪離地。側向加速度由縱向速度和轉彎半徑直接決定,因此控制好方向盤轉角和行駛速度能有效防止側翻。
根據上述分析,引入汽車側翻研究中常用的側翻評價指標,即橫向載荷轉移率 LTR(lateral load transfer ratio)來評定汽車的側翻。

式中:FLF,FLR,FRF,FRR分別為左前輪、左后輪、右前輪、右后輪的垂向載荷,可在ADAMS/Car分析中直接輸出。
當橫向載荷轉移率LTR的絕對值小于1時,汽車未側翻;當LTR絕對值等于1時,認為汽車處于側翻的臨界狀態;當LTR絕對值大于1時,認為汽車已經側翻。
2 典型工況仿真分析
考慮到駕駛員實際操作中的復雜性,很難完全模擬各種情況下駕駛員操縱車輛行駛的路徑。選取側翻試驗中的典型行駛工況——“魚鉤”行駛工況(fish-hook)和正弦轉向工況(swept-sine steer)——進行汽車側翻性能分析。其中“魚鉤”行駛工況是由美國NHTSA針對汽車的側翻穩定性而提出的試驗工況,主要用于檢驗車輛在極限轉彎工況下的側翻穩定性。正弦轉向工況可用來研究和評價轉向頻率對汽車側翻性能的影響。實驗汽車主要參數如表1所示。
2.1 Fish-hook工況
汽車在標準側翻實驗的fish-hook工況運行,設置仿真初始車速為30 m/s,方向盤轉角為180°,轉向速率為50(°)/s。觀察各個車輪的垂向載荷隨時間的變化曲線及橫向載荷轉移率曲線。改變仿真的初始車速,當橫向載荷轉移率絕對值最大值正好等于1時,記錄此時車速為側翻臨界車速。
圖3和圖4為方向盤轉角為180°,轉向速率為50(°)/s,初始車速為36.9 m/s時的仿真結果。可以看出:當汽車運行到5 s左右時,右前輪和右后輪垂直載荷為正好為0,橫向載荷轉移率為1,表明汽車右側車輪離地,達到臨界側翻危險狀態。

圖3 fish-hook工況車輪垂直載荷

圖4 汽車在fish-hook工況的橫向載荷轉移率
改變方向盤轉角,保持方向盤轉向速率為50(°)/s時,獲得方向盤轉角在50°~300°范圍內的汽車側翻臨界速度,從而得到側翻臨界速度與方向盤轉角關系,如圖5所示。

圖5 側翻臨界速度與方向盤轉角關系
同理,改變方向盤轉角速率,保持方向盤轉角幅值為180°,得到汽車側翻臨界速度與方向盤轉速關系,如圖6所示。

圖6 側翻臨界速度與方向盤轉速的關系
從圖5和圖6可以看出:在轉向速率一定的情況下,方向盤轉角越大,側翻臨界速度越小,且方向盤在小轉角范圍內變化時臨界速度變化明顯,而當方向盤轉角一定時,側翻臨界速度隨著轉向速率的增大而減小。因此,方向盤轉角越大,駕駛員操縱方向盤的速度越快,則汽車越容易發生側翻。
2.2 Swept-sine工況
為研究方向盤轉向頻率對汽車側翻性能的影響,選擇swept-sine的方向盤轉角輸入,分別得出各個車輪的垂向載荷隨時間的變化曲線及橫向載荷轉移率隨時間的變化關系,如圖7、8所示。可以看出:當汽車運行到7.7 s左右時,左前輪和左后輪垂直載荷為正好為0,表明汽車左側車輪離地,且橫向載荷轉移率為-1,汽車達到臨界側翻危險狀態,此時的汽車側翻臨界車速為36.1 m/s。

圖7 swept-sine工況車輪垂直載荷

圖8 汽車在swept-sine工況的橫向載荷轉移率
分別改變方向盤的轉向頻率和轉角幅值,獲得不同方向盤轉角幅值,得到汽車發生側翻的臨界速度與轉向頻率之間的關系曲線,如圖9所示。

圖9 側翻臨界速度與轉向頻率關系
從圖9可以看出:當轉角幅值一定時,汽車側翻臨界車速隨轉向頻率的增加而增大;當方向盤轉向頻率一定時,側翻臨界速度隨著方向轉角幅值的增大而減小。即汽車發生側翻危險時,需要駕駛員有靈敏的反應速度和駕駛經驗,快速地以小幅值調節方向盤,可降低汽車側翻危險。
3 結論
1)單方向操作時,駕駛員操縱方向盤的速度越快,方向盤轉角越大,則汽車側翻臨界速度越小,即汽車越容易發生側翻。
2)汽車發生側翻危險時,需要駕駛員有靈敏的反應速度和駕駛經驗,快速、反復地以小幅值調節方向盤,可降低汽車側翻危險。
[1]National Highway Traffic Safety Administration,Traffic safety facts 2012:a compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system [R].Washington:Department of Transportation,2014:77-85.
[2]金智林,馬翠貞,張甲樂,等.采用電控液壓制動系統的SUV防側翻魯棒控制[J].重慶理工大學學報:自然科學版,2014(1):1-6.
[3]來飛.客車側傾及側翻安全性綜合評價方法[J].客車技術與研究,2014(3):5-7,12.
[4]陳毅華,徐健康,毛建國,等.基于TTR的汽車側翻預警研究[J].重慶理工大學學報:自然科學版,2014(7):11-14,54.
[5]徐中明,于海興,伍小龍,等.車輛側翻指標與側翻風險因素分析[J].重慶大學學報,2013,36(3):25-31.
[6]金智林,張鴻生,馬翠貞.基于動態穩定性的汽車側翻預警[J].機械工程學報,2012,48(14):128-133.
[7]褚端峰,李剛炎.半主動懸架汽車防側翻控制研究[J].汽車工程,2012,34(5):399-402.
[8]Larish C,Piyabongkarn D,Tsourapas V,et al.A new predictive lateral load transfer ratio for rollover prevention systems[J].IEEE Transactions on Vehicular Technology,2013,62(7):2982-2936.
[9]Yoon J,Cho W,Kang J,et al.Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track[J].Control Engineering Practice,2010,18(6):585-597.
[10]李志剛,沈明,鄒猛,等.基于多體動力學的微型客車急轉彎側翻傾向性仿真[J].清華大學學報:自然科學版,2010,50(8):1286-1289.
[11]時曉杰,何杰.基于ADAMS/CAR的車輛側翻風險因素研究[J].公路交通科技,2014,31(10):130-133.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車電器(2018年1期)2018-06-05 01:22:54
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
軍事歷史(1985年2期)1985-01-18 07:39:33