基于二次曲線擬合的隧道激光點云濾波方法及其應(yīng)用
2015-12-11 05:57:54徐光華
測繪通報 2015年5期
關(guān)鍵詞:區(qū)域
徐光華
(吉林鐵道職業(yè)技術(shù)學院,吉林吉林132200)
一、引 言
目前地鐵隧道形變監(jiān)測常用的方法主要是利用全站儀、斷面儀、收斂計等[1-3]常規(guī)儀器進行監(jiān)測,雖然精度高,但效率低下,難以實現(xiàn)對隧道整體進行實時自動監(jiān)測。隨著三維激光掃描儀測量精度的不斷提高,其應(yīng)用范圍逐漸擴展到地鐵隧道形變監(jiān)測領(lǐng)域[4-5]。劉燕萍等[6]將隧道點云數(shù)據(jù)分割成切片,利用多點坐標平差計算圓心的方法求取切片圓心和半徑,對擬合的圓環(huán)與設(shè)計值進行比較獲取隧道的收斂變化情況;托雷等[7]提出一種可應(yīng)用于變形監(jiān)測的基于三維激光點云的隧道斷面連續(xù)截取方法,并對斷面擬合的精度進行分析,證明了擬合精度滿足要求;王令文等[8]以隧道設(shè)計中軸線為基準提取隧道橫斷面,并結(jié)合掃描儀獲得的影像數(shù)據(jù)進行斷面收斂、滲水、裂縫等分析,表明采用該檢測技術(shù)能夠得到可靠的隧道檢測信息;史玉峰等[9]采用基于幾何特征點與ICP算法相結(jié)合的點云數(shù)據(jù)配準方法對多視點云數(shù)據(jù)進行配準,配準數(shù)據(jù)經(jīng)去噪、精簡后建立三維模型,最后對隧道兩期掃描數(shù)據(jù)模型進行疊加分析,得到隧道部分縱橫斷面上的整體位移量;謝雄耀等[10]聯(lián)合采用圓柱面擬合與橢圓擬合進行點云建模,并運用誤差分布統(tǒng)計規(guī)律進行點云降噪,通過與全站儀的精度比較試驗,驗證了地面三維激光掃描技術(shù)在隧道變形測量中的可靠性。
綜上所述,本文首先利用二次曲線擬合的隧道中軸線構(gòu)建了地鐵里程與隧道盾構(gòu)環(huán)片之間的對應(yīng)關(guān)系,然后沿中軸線對隧道盾構(gòu)環(huán)片進行分割,針對分割后盾構(gòu)片上附著的金屬支架等噪聲點,提出基于隧道設(shè)計半徑的粗濾噪和基于多項式擬合的精濾噪相結(jié)合的濾噪方法,最后對濾噪后的兩期隧道點云分別建立數(shù)字表面模型(DSM)并進行疊加分析,以獲取不同里程處的隧道形變情況。為易于獲取隧道整體各區(qū)域的形變情況,將隧道的兩側(cè)分別向外展開,由此可解決必須要變換視角才能獲取隧道各區(qū)域形變的問題。
二、隧道激光點云處理方法
1.隧道中軸線及里程計算方法
隧道中軸線由離散點組成[11],設(shè)x方向的間距為Δx,單位mm,則中軸線的表達式為

式中,a1、b1、c1、a2、b2、c2為隧道中軸線的擬合參數(shù);x0為中軸線的起始點。
若已知隧道內(nèi)任一點坐標對應(yīng)的里程值,即可建立以中軸線為基準的里程計算式(如圖1所示)。設(shè)已知點p(x,y,z)處里程為K0+0,通過最近點搜索法確定出該點對應(yīng)于中軸線某點pi(xi,yi,zi),p和pi處里程相同,即

在確定pi的里程為K0+0后,進一步利用軸線上離散點累加求得中軸線上任意點pn(xn,yn,zn)處的里程為


圖1 里程對應(yīng)圖
2.隧道點云分割
如圖2所示,沿中軸線以間隔d對隧道進行分割,設(shè)點 Oi(xi,yi,zi)處的里程為 K0+0,由式(4)可計算出 K0+d 處的坐標 Oi+1(xi+1,yi+1,zi+1)。過 Oi、Oi+1的法平面可分別表示為


圖2 點云分割示意圖
由式(4)可得到里程位于K0+0至K0+d區(qū)域內(nèi)的掃描點集Φi

如圖3所示,利用 Oi(xi,yi,zi)點處的切向量ei(1,y'i,z'i)對提取的離散點集Φi分別繞Z軸和Y軸旋轉(zhuǎn)α、β,使轉(zhuǎn)換后的X軸平行于ei,則

相應(yīng)的坐標轉(zhuǎn)換公式為

以O(shè)i+1為起點,計算里程位于K0+d至K0+2d區(qū)域內(nèi)點集Φi+1,以此類推,完成隧道整體點云的分割。

圖3 旋轉(zhuǎn)變換示意圖
3.隧道展開
如圖4(a)所示,以中軸線上的分割點為基準、Y軸正向為起始方向,沿45°和135°方向?qū)⒎指詈蟮母鲄^(qū)域依次劃分為左側(cè)(L)、頂部(U)和右側(cè)(R)3部分,在交點處分別將L和R向兩側(cè)旋轉(zhuǎn)90°展開隧道,如圖4(b)所示。點集Φi中L、U、R的劃分為

式中,Δy=y-yi,Δz=z-zi,y、z為 Φi中的各點坐標,yi、zi為軸線上分割點Oi的坐標。

圖4 隧道展開示意圖
L、R的展開式可表示為

式中,py=yi+rcos(π/4),pz=zi+rsin(π/4),r為隧道半徑。
對L、U、R按照式(8)進行坐標逆變換,完成點集Φi的展開,并依次對各分割區(qū)域的點云按上述步驟處理,完成隧道整體展開。
4.隧道點云濾噪
如圖5(a)所示,粗濾噪是在隧道展開前利用各分割區(qū)域內(nèi)的點到中軸線上分割點之間距離與隧道半徑設(shè)計值r的差值大小進行濾噪,對點集Φi粗濾噪后得到的點集Φ'i可表示為

式中,γ為粗濾噪的閾值,表示隧道的最大位移量,實際工作中可適當調(diào)大。
如圖5(b)所示,精濾噪是在隧道展開后對各分割區(qū)域內(nèi)的L、U、R分別使用f次多項式擬合,進行迭代濾噪(f的選取在后文討論)

以3倍均方差作為濾噪準則,對點集Φi中剩余的掃描點重新進行f次多項式擬合,然后使用新求解的參數(shù)計算點集Φi的均方差并再次濾噪,以此完成隧道點云的精濾噪。
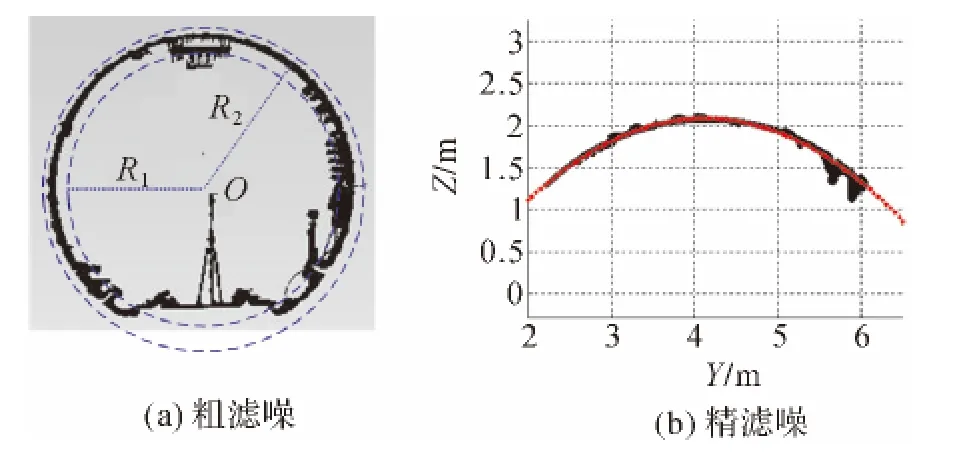
圖5 隧道點云的粗濾噪及精濾噪
三、試驗驗證
選擇鄭州市某地鐵站(長度約為24 m)作為試驗區(qū),采集的兩期點云數(shù)據(jù)間隔為120 d,掃描時豎直角與水平角分辨率均設(shè)為0.05°。圖6(a)中曲線為擬合出的隧道中軸線,設(shè)定間距為1 mm。根據(jù)中軸線對隧道進行分割及粗濾噪,首先指定隧道盾構(gòu)環(huán)片間縫隙上p作為里程起始點,記為K0+0;利用式(2)得到p點對應(yīng)于中軸線上同一里程處的p',將分割間隔d設(shè)定為與隧道盾構(gòu)管片寬度相等(1.5 m),考慮到管片的最大徑向位移小于30 mm,將粗濾噪?yún)?shù) γ設(shè)為 30 mm;然后按式(3)—式(10)完成對隧道各分割區(qū)域的粗濾噪及展開。展開后的L、U、R之間的距離取決于式(9)中設(shè)定的隧道半徑r。圖6(c)為r=3.0 m時隧道經(jīng)粗濾噪后展開的結(jié)果。

圖6 隧道展開示意圖
如圖7所示,以位于K0+10.5至K0+12間盾構(gòu)管片的R部為例,經(jīng)過粗濾噪的單個隧道片仍附著了大量噪聲點,因此需要利用多項式函數(shù)模型對經(jīng)過坐標轉(zhuǎn)換后的各隧道片進行精濾噪。將多項式次數(shù) f分別取 2、3、4、5、6、7、8 時,濾噪效果如圖8 所示。

圖7 隧道L、U、R及單個隧道片
圖8(a)為隧道片在YOZ面的投影,圖8(b)—圖8(f)中灰色曲線分別為 f取為 2、3、4、6、8 時擬合的函數(shù)曲線,表 1 列出了 f為 2、3、4、5、6、7、8 時濾噪后剩余的點數(shù)。由圖8(e)—圖8(f)可知,當f≥6時,擬合出曲線的邊緣出現(xiàn)不規(guī)則的震蕩,這與實際情況不符;當f≤6時,濾噪后剩余點數(shù)在f=4時取得最大值(見表1)。因此,選擇f=4濾波效果最佳。圖9為f=4時,單個隧道片及隧道整體的精濾噪結(jié)果。

表1 多項式次數(shù)及濾噪后的點數(shù)
本文對經(jīng)過濾噪處理的兩期隧道點云分別建立DSM,疊加后進行對比分析,得到隧道內(nèi)壁不同量級的形變區(qū)域。圖10為K0+0至K0+24區(qū)域內(nèi)兩期點云經(jīng)濾噪、展開等操作后的疊加結(jié)果,圖中淺灰色、深灰色區(qū)域分別為第1期、第2期DSM,疊加分析時,以第1期DSM為基準對第2期DSM向內(nèi)、外兩個方向偏移不同的k值,用于檢測不同量級的形變區(qū)域。圖11(a)、(c)、(e)為疊加后對第 2期DSM向外分別偏移5 mm、10 mm和15 mm的情況;圖11(b)、(d)、(f)為疊加后對第2期DSM向內(nèi)分別偏移5 mm、10 mm和15 mm的情況。

圖8 不同次數(shù)濾噪效果

圖9 隧道精濾噪結(jié)果
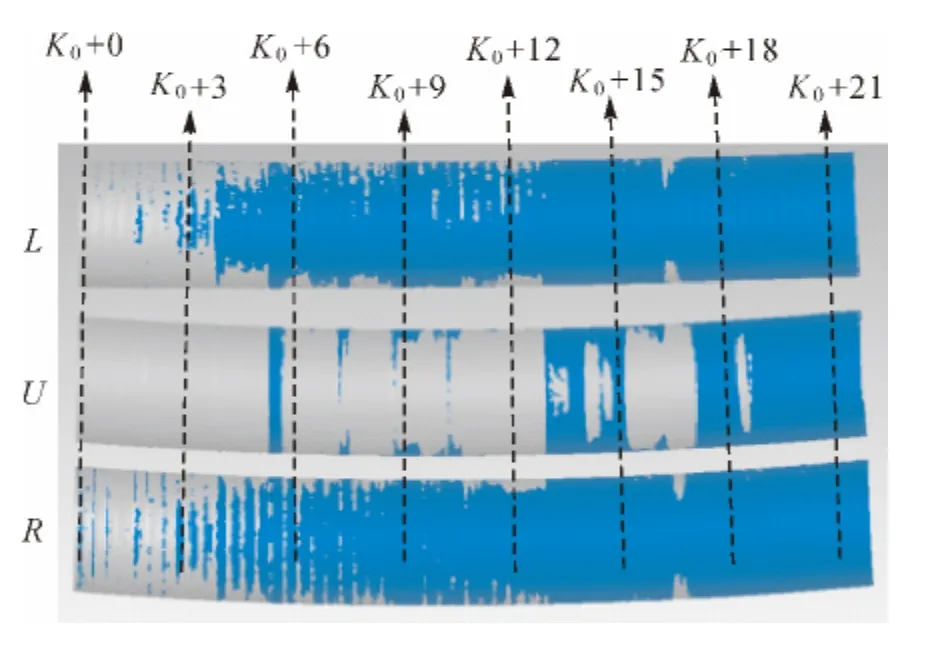
圖10 兩期隧道模型疊加
圖11(a)中的淺灰色區(qū)域和圖11(b)中的深灰色區(qū)域表示對應(yīng)的隧道內(nèi)壁點形變量大于5 mm;圖11(c)中的淺灰色區(qū)域和圖11(d)中的深灰色區(qū)域表示形變量大于10 mm;由圖11(e)、(f)可知,該區(qū)間隧道形變量均小于15 mm。上述分析結(jié)果,與通過布設(shè)在隧道內(nèi)壁上的監(jiān)測點獲取的監(jiān)測結(jié)果一致。

圖11 隧道形變分析
四、結(jié)束語
針對地鐵隧道的形狀特征,本文基于三維激光掃描儀獲取的大數(shù)據(jù)量點云特點,提出以隧道中軸線為基準的隧道形變監(jiān)測方法,通過點云分割、粗濾噪、隧道展開及精濾噪等處理流程,并對不同時期監(jiān)測結(jié)果構(gòu)建的DSM進行疊加分析,得到了隧道內(nèi)任意點位的形變量。研究結(jié)果可為隧道點云濾噪及隧道監(jiān)測方案設(shè)計等提供借鑒。
[1]陳榮彬,林澤耿,李剛.測量機器人在地鐵隧道監(jiān)測中的研究與應(yīng)用[J].測繪通報,2012(6):61-63.
[2]曾鼎華,張永興,陰可,等.三角形量測法在隧道變形監(jiān)測中的應(yīng)用研究[J].水文地質(zhì)工程地質(zhì),2005(5):113-115.
[3]黎昵,岳建平.光纖變形傳感技術(shù)及其應(yīng)用分析[J].測繪通報,2007(11):34-36.
[4]畢俊,馮琰,顧星曄,等.三維激光掃描技術(shù)在地鐵隧道收斂變形監(jiān)測中的應(yīng)用研究[J].測繪科學,2008,33(S2):14-15.
[5]夏國芳,王晏民.三維激光掃描技術(shù)在隧道橫縱斷面測量中的應(yīng)用研究[J].北京建筑工程學院學報,2010(3):21-24.
[6]劉燕萍,程效軍,賈東峰.基于三維激光掃描的隧道收斂分析[J].工程勘察,2013(3):74-77.
[7]托雷,康志忠,謝遠成,等.利用三維點云數(shù)據(jù)的地鐵隧道斷面連續(xù)截取方法研究[J].武漢大學學報:信息科學版,2013,38(2):171-175.
[8]王令文,程效軍,萬程輝.基于三維激光掃描技術(shù)的隧道檢測技術(shù)研究[J].工程勘察,2013(7):53-57.
[9]史玉峰,張俊,張迎亞.基于地面三維激光掃描技術(shù)的隧道安全監(jiān)測[J].東南大學學報:自然科學版,2013(S2):246-249.
[10]謝雄耀,盧曉智,田海洋,等.基于地面三維激光掃描技術(shù)的隧道全斷面變形測量方法[J].巖石力學與工程學報,2013(11):2214-2224.
[11]朱寧寧,張趙興,姚方芳.點云在地鐵隧道形變監(jiān)測中的應(yīng)用[J].測繪科學,2014,39(S1):84-87.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
民生周刊(2012年10期)2012-10-14 09:06:46