基于MATLAB仿真的數字PID控制器設計方法
2015-12-16 08:11:10張策
森林工程 2015年6期
張 策
(哈爾濱工業(yè)大學信息與電氣工程學院,山東威海264200)
在機電控制系統(tǒng)的設計中,PID控制是生產過程中的一種閉環(huán)控制方法,而PID控制器則是在工業(yè)控制之中常見的一種反饋回路補件,又分為比例單元P、積分單元I和微分單元D[1-3]。PID控制原理簡單、使用方便、適用性強及魯棒性強,而且易于整定。同時,其控制品質對被控對象的變化并不敏感,因此得到廣泛的應用[4-5]。常規(guī)PID控制參數的最佳調整還未實現自動化,依靠人工試湊的整定方法不僅需要豐富的經驗和技巧,而且十分費時[6-7]。同時,在實際控制系統(tǒng)控制過程中,由于噪聲、負載擾動和其他一些環(huán)境條件變化的影響,受控過程參數、模型結構均將發(fā)生變化。在這種情況下,采用常規(guī)PID控制器難以獲得滿意的控制效果。因此,本文基于MATLAB仿真得到一種數字PID控制器的設計方法,使得PID控制參數易于調整且具有普適性,為實際控制系統(tǒng)的設計與調試提供了理論參考依據。
1 基于MATLAB仿真的數字PID控制器設計方法
1.1 PID控制器設計原理
設計需要具體參數,本文取單位反饋系統(tǒng)的開環(huán)傳遞函數如式(1)所示:

系統(tǒng)的穩(wěn)態(tài)誤差不大于0.1,超調量不大于20%,調節(jié)時間不大于0.5 s。算法方面采用位置式算法,這是一種PID算法的表現形式。
離散的PID表達式如式(2)所示:

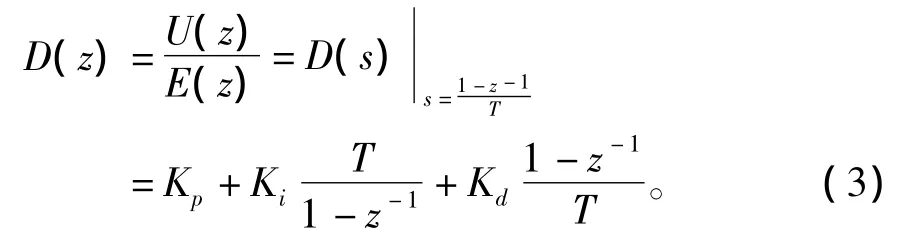
使用模擬控制器離散化的方法,將理想模擬PID控制器D(s)轉化為響應的理想數字PID控制器D(z)。采用后向差分法得到數字控制器的脈沖傳遞函數,如式(3)所示:
1.2 基于MATLAB仿真的數字PID參數選擇
在此采用擴充臨界比例帶法來整定PID參數,擴充臨界比例帶法是以模擬PID調節(jié)器中使用的臨界比例帶法為基礎的一種數字PID參數的整定方法[8-9],主要包含兩個步驟:①選擇合適的采樣周期T;②在純比例的作用下,給定輸入階躍變化時,逐漸加大比例作用Kp(即減小比例帶),直至系統(tǒng)出現等幅震蕩,記錄比例增益Kc,及振蕩周期Tc。Kc成為臨界振蕩比例增益(對應的臨界比例帶),Tc成為臨界振蕩周期。
在MATLAB中對以上步驟進行編程,得到初步參數模擬結果,如圖1所示。
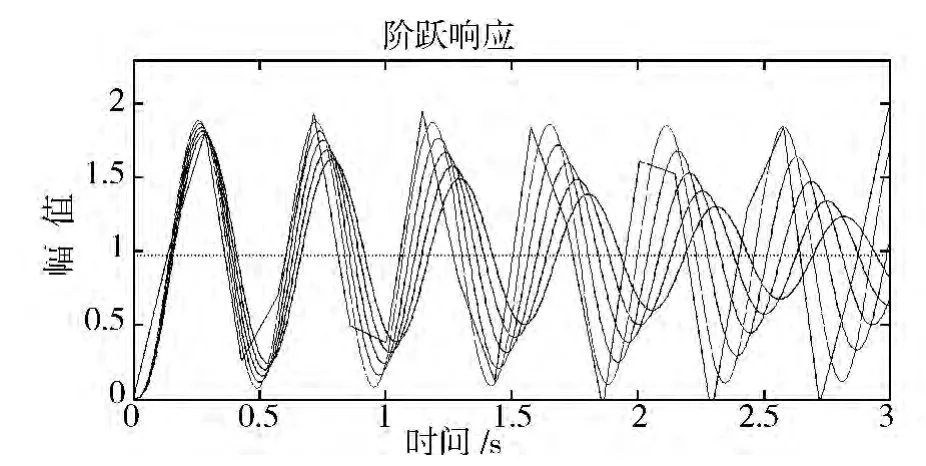
圖1 初步階躍響應曲線Fig.1 Preliminary step response curves
在初步結果的基礎上改變范圍和步長為p=[40∶1∶45],得到如圖2所示調整后的結果。
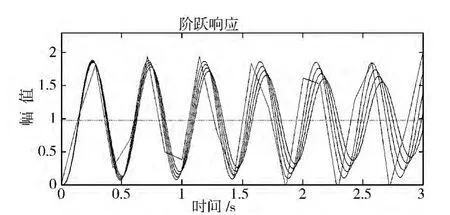
圖2 調整后階躍響應曲線Fig.2 Adjusted step response curves
通過圖形變化趨勢,進一步精確取得Kc的值為43(中間值),Tc約為0.5。
擴充臨界比例帶法選擇數字PID參數的計算公式見表1。
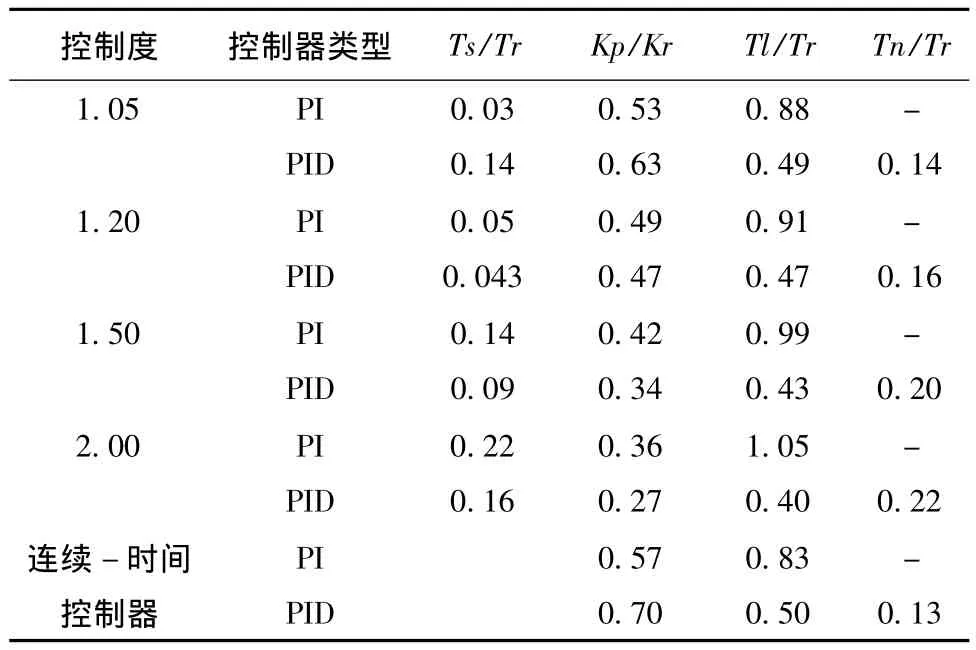
表1 擴充臨界比例度法數字PID控制器的參數計算公式Tab.1 Formula of the digital PID controller's parameters with extended critical ratio method
1.3 控制度選擇
控制度為數字調節(jié)器和模擬調節(jié)所對應的國度過程的誤差平方積分之比[10-11],即:
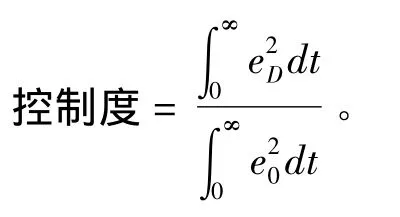
式中:e0為數字調節(jié)器的控制誤差;e為模擬調節(jié)器的控制誤差。
當控制度為1.05時,數字調節(jié)器與模擬調節(jié)器的控制效果相當;當控制度為2時,數字調節(jié)器比模擬調節(jié)器的控制效果差一倍。
1.4 Simulink 模型建立
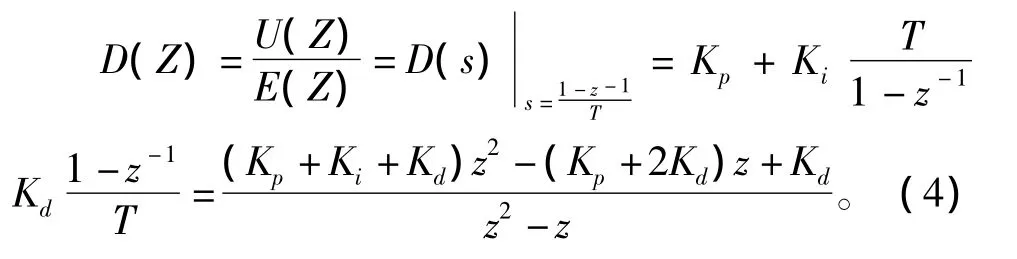
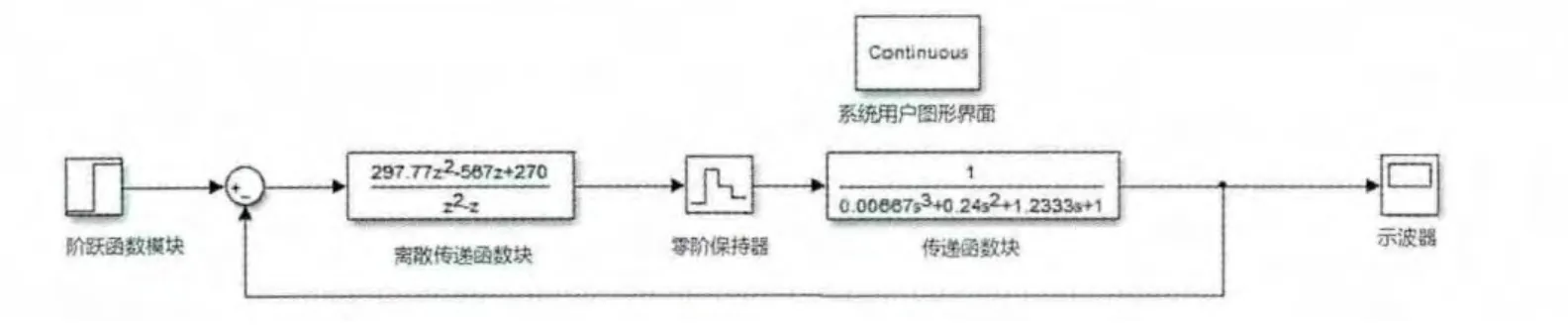
圖3 Simulink模型Fig.3 Simulink model
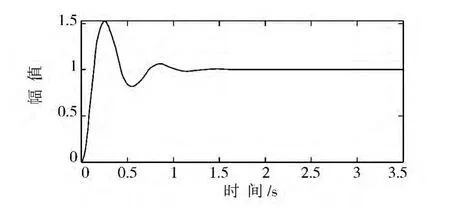
圖4 Scope中階躍響應曲線Fig.4 Step response curve in Scope
由圖4可知,模型的超調量較大,調節(jié)時間較長,需更換整定方法。因此嘗試用試湊法得到一組數據:T=0.015,Kp=15,Ki=0.23,KD=250。將其帶入MATLAB-Simulink模型,模型發(fā)生變化,結果如圖5所示,其在Scope中的階躍響應圖形如圖6所示。
由圖6可知,用試湊法得到的數據滿足設計要求,即:系統(tǒng)的穩(wěn)態(tài)誤差不大于0.1,超調量不大于20%,調節(jié)時間不大于0.5 s。
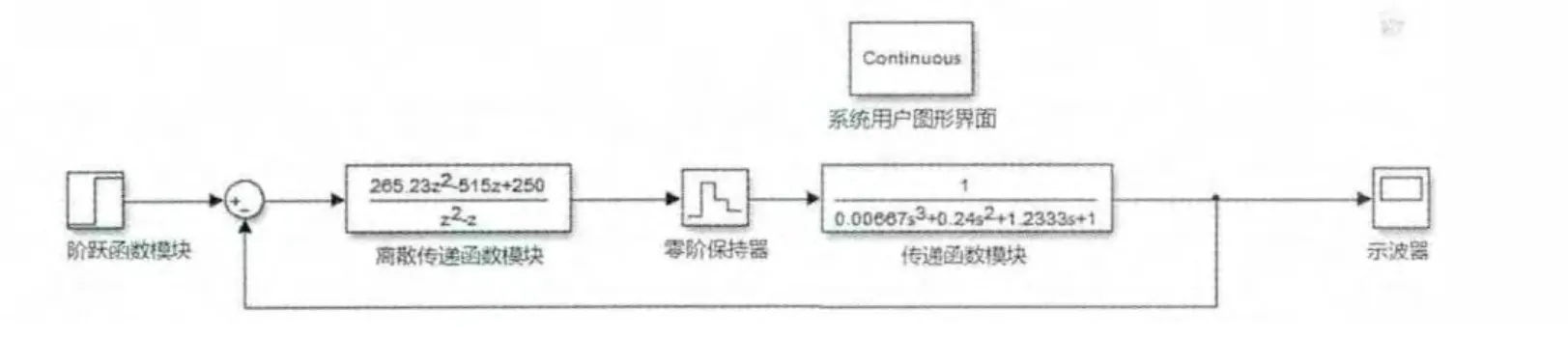
圖5 調整后Simulink模型Fig.5 Adjusted Simulink model
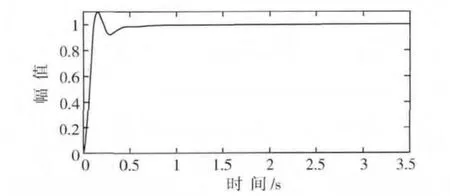
圖6 調整后Scope中階躍響應曲線Fig.6 Adjusted step response curves in Scope
2 MCS-51單片機實現控制器的設計
軟件設計完成之后需要硬件實現,這里采用MCS-51單片機來實現算,其控制系統(tǒng)結構框圖如圖7所示。

圖7 控制系統(tǒng)結構框圖Fig.7 The structure diagram of a controller systerm
2.1 器件選擇
主控制器選用熟悉的AT89c51單片機。由于沒有對精度的要求,選用常見的8位AD/DA芯片ADC0809和DAC0832[12]。由于系統(tǒng)要求采樣周期0.015 ms,而上述 AD、DA芯片轉化時間很短(ADC0809 約100 μs,DAC0832 約 1 μs),因此上述芯片滿足要求。
2.2 電路設計
單片機與AD、DA采用總線方式連接,鎖存器74LS373進行地址鎖存。采用統(tǒng)一編址方式訪問[13]。
控制器程序下載到單片機內部,經單片機處理,輸出為數字信號,通過DAC0832將數字量轉換為模擬量,作為被控對象的輸入,被控對象的輸出也為模擬量,經過ADC0809處理,模擬量轉換為數字量,送入單片機內,完成閉環(huán)控制。
其中,ADC0809與單片機連接如圖8所示,DAC0832與單片機連接如圖9所示。
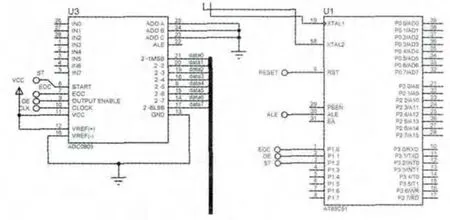
圖8 ADC0809與單片機連接示意圖Fig.8 Connection schematic diagram of ADC0809 and MCU
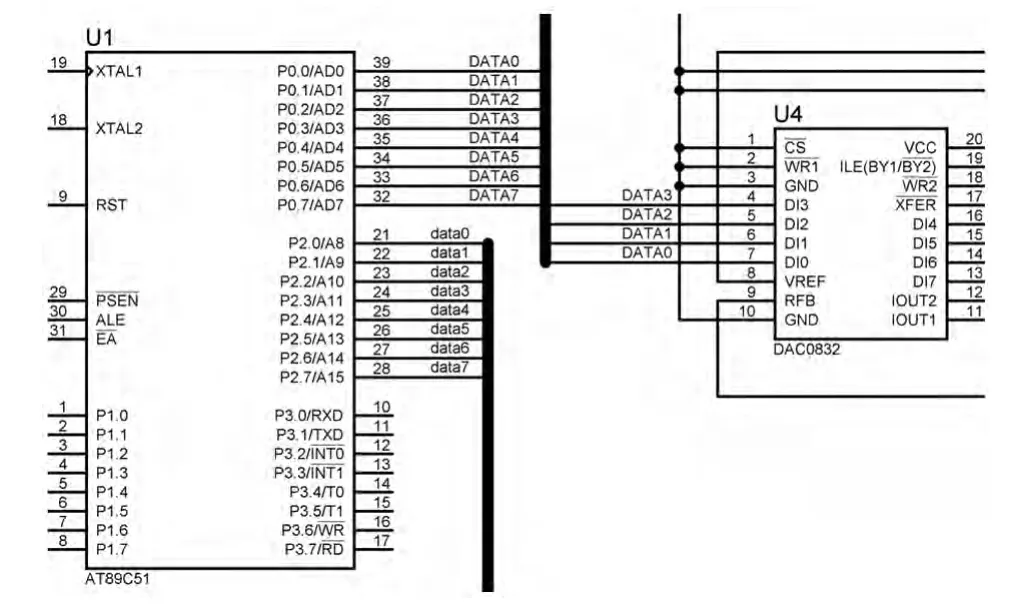
圖9 DAC0832與單片機連接示意圖Fig.9 Connection schematic diagram of DAC0832 and MCU
3 結束語
本文基于MATLAB仿真得到了一種數字PID控制器的設計方法,并對模擬結果進行驗證。結果表明:本設計方法簡單有效,切實可行,參數易于調整且具有普適性。這種設計方法可以應用于對控制精度要求較高的工業(yè)生產過程中,為實際控制系統(tǒng)的設計與調試提供了理論參考依據。
[1]楊 智,朱海鋒,黃以華.PID控制器設計與參數整定方法綜述[J].化工自動化及儀表,2006,32(5):1-7.
[2]于曉敏,于曉坤,耿 蕊.PID控制器參數優(yōu)化算法的仿真研究[J].計算機仿真,2011,28(7):212-215.
[3]鄭劍翔.運用Matlab實現 PID控制器的設計[J].福州大學學報:自然科學版,2011,39(6):898-903.
[4]晏亭太.智能自適應PID/PD控制器設計及仿真研究[D].哈爾濱:哈爾濱工業(yè)大學,2014,16-29.
[5]張燕紅.PID控制器參數自整定方法綜述[J].常州工學院學報,2008,21(4):49-53.
[6]李 瑞,劉明生,李 燕.基于MATLAB的模糊PID控制器的設計與研究[J].科技創(chuàng)新與應用,2013(29):33-34.
[7]王麗飛.PID控制器參數整定方法研究[D].青島:中國石油大學,2008,15-24.
[8]楊 璐,雷菊陽.基于MATLAB的參數自整定模糊PID控制器的兩種設計方法[J].計算機測量與控制,2015,23(4),1212-1214.
[9]田 海,李 軍.基于Matlab的模糊自整定PID控制器仿真研究[J].工業(yè)控制計算機,2011,24(6):24-25.
[10]羅海波.PID控制器設計與仿真研究[J].計算機仿真,2012,29(2):345-348.
[11]鄭美茹.模糊PID控制器的仿真研究[J].裝備制造技術,2011(4):74-76.
[12]王 輝,王 琀.其于遺傳算法和近鄰分類器識別率的特征選擇方法[J].林業(yè)機械與木工設備,2015,43(9):26-27.
[13]賀昌勇,張厚江,祖漢松,等.基于虛擬儀器運動控制技術的現狀與發(fā)展趨勢[J].林業(yè)機械與木工設備,2014,42(2):9-12.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56