具有變胞功能的焊接機器人拓撲分析和工作空間建模分析
2015-12-17 07:13:36黃敏雄胥剛蔡敢為戴建生
現代制造技術與裝備 2015年6期
黃敏雄胥 剛蔡敢為戴建生
(1.湖南汽車工程職業學院,株洲 412001;2.廣西大學機械工程學院,南寧 530004;3.倫敦大學國王學院,倫敦 WC2R 2LS 英國;4.天津市現代機電裝備技術重點實驗室,天津 300160)
具有變胞功能的焊接機器人拓撲分析和工作空間建模分析
黃敏雄1胥 剛1蔡敢為2戴建生3,4
(1.湖南汽車工程職業學院,株洲 412001;2.廣西大學機械工程學院,南寧 530004;3.倫敦大學國王學院,倫敦 WC2R 2LS 英國;4.天津市現代機電裝備技術重點實驗室,天津 300160)
此文使用了關聯矩陣及邏輯運算,對變胞過程進行描述,該方法能直觀地描述出構態變換的過程和目的,變胞矩陣構造簡便。同時,結合李群、李代數的旋量理論,給出機器人系統的運動學建模方程,并用Matlab/SimMechanics進行工作空間仿真,為后面進行運動學仿真和動力學仿真奠定基礎。
機器人 變胞機構 關聯矩陣 旋量理論 Matlab/SimMechanics工作空間
本文采用關聯矩陣法,對變胞機構進行變胞構態的描述,并對變胞機構進行運動學仿真分析。
1 變胞機構變胞部分的構態變換描述
1.1 關聯矩陣的描述方法
變胞機構的多個構態形態的變換可以由矩陣演算來描述,本文通過二進制代碼的邏輯運算來描述變胞機構構態的變換,且給出了構態變換的邏輯運算表達式,如式(1)所示。

式中,Ak(nk+1)×mk是描述構態k的矩陣表達式,有nk個構件,mk個運動副;B(k,k+1)是構態k到k+1的變換矩陣,具體形式與構態變換方式有關;⊕表示矩陣對應元素進行異或運算,未對應元素與0進行異或運算(0+0=0,0+1=1,1+1=0)。
由關聯矩陣的特性可知:矩陣行運算表示構件變化,矩陣列運算表示運動副變化。
此文研究的變胞焊接機器人結構是基于構件數目的變化達到根據不同工作環境采用不同的拓型結構,使用力變胞和幾何變胞的方式使機構變胞過程得以實施。構件數目的變化分為構件數目減少和構件數目增加兩種。
1.2 機構的構型
該機構的構型圖如圖1、圖2、圖3、圖4所示。
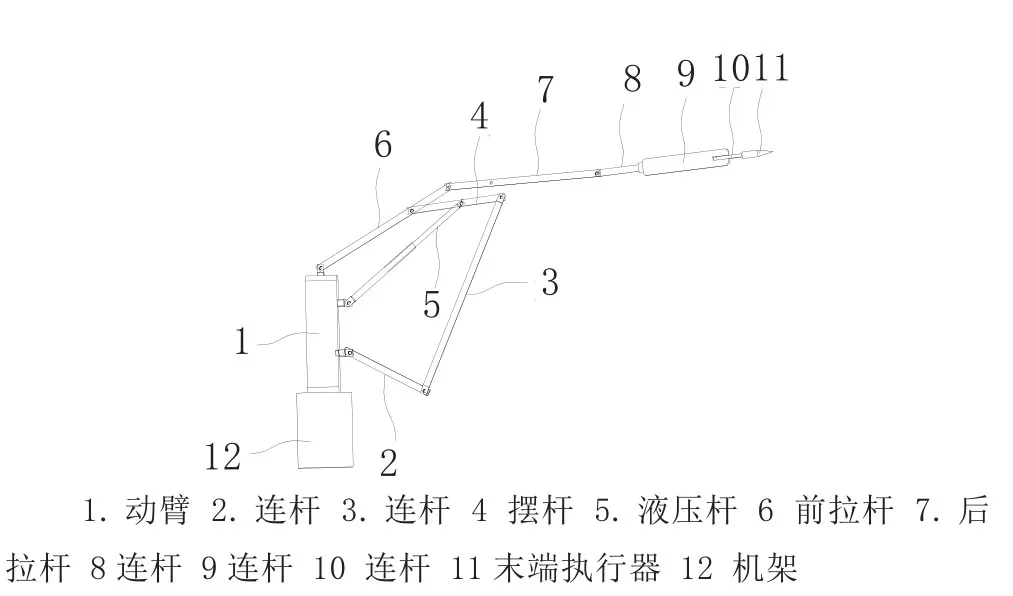
圖1 變胞焊接機器人虛擬樣機模型

圖2 變胞焊接機器人源機構簡圖

圖3 變胞焊接機器人變胞第一構態機構簡圖
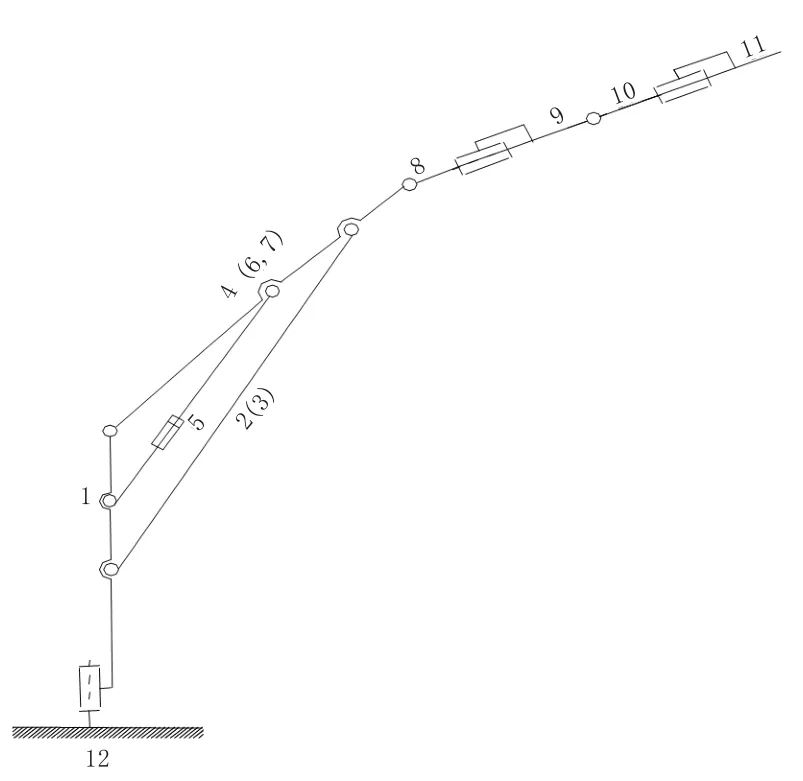
圖4 變胞焊接機器人變胞第二構態機構簡圖
1.3 變胞部分構件數目變化
此機構以構件數目的減少來說明。變胞是通過構件的合并來實現的,通過吳艷榮等提出的一個折紙機構可以看出比較簡單的構件數目減少的拓撲變化過程,如圖5(a)所示,含閉環子鏈的開環七桿機構,先將構件6與7合并,之后把4合并到構件6和7形成的新構件中,形成閉環五桿機構,再將構件3合并到構件2(利用構件1和5之間的P副把構件2和3連接在一起,使之與P副平行),形成閉環四桿機構。

圖5 變胞焊接機器人變胞結構構態變換過程
將構件i2合并到構件i1(1≤i1,i2≤nk,i1≠i2)的構態變換就是將Ak(nk+1)×mk中li2行的連接關系轉移到li1行,再將li2行元素全變為0,表示構件消失。該變換矩陣可寫為公式(2)。
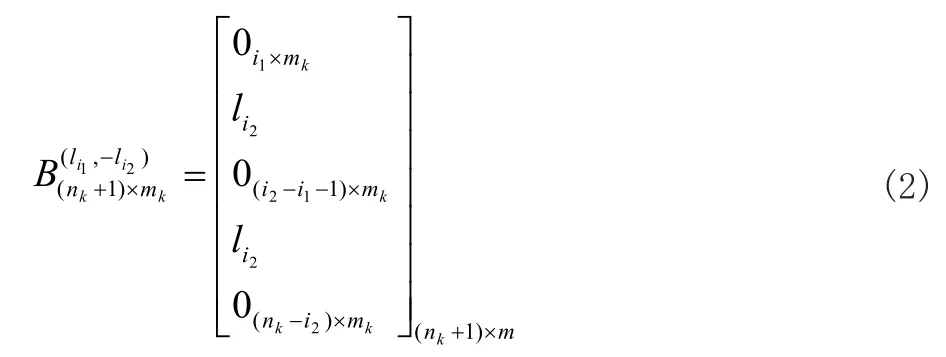
根據式(1)和式(2),圖5所表示的構態變化過程可由矩陣演算描述為以下公式。
從圖5(a)到圖5(b)的變換過程如式(3)所示。

從圖5(b)到圖5(c)的變換過程如式(4)所示。

通過利用關聯矩陣法描述變胞焊接機器人的構態變換過程可以看出,提出的矩陣邏輯演算可以清楚描述在構態變換過程中構件數目變化所引起的拓撲結構的變化,從而為下一步的運動學建模及以后的動力學運算提供依據。
2 工作空間仿真分析
在Solidworks里建立變胞焊接機器人三維各零部件模型,并進行裝配,然后通過Solidworks與Matlab之間的無縫連接,將模型導入SimMechanics,系統自動生成由各剛體、關節阻尼傳感器等組成的仿真模型,在各關節增加驅動模塊,并編寫工作空間的M文件,建立觀察仿真模型工作空間的模塊,變胞前后的工作空間的變化如圖8、圖9所示。
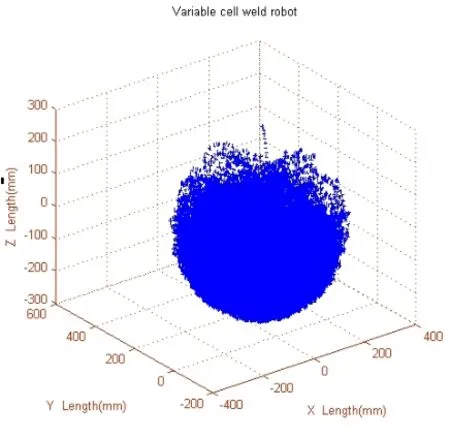
圖8 變胞前工作空間

圖9 變胞后工作空間
通過變胞機構工作的變化可以看出,變胞焊接機器人變胞前的工作空間呈現圓形規律,可達最大空間是類圓面;變胞焊接機器人變胞后的工作空間呈現橢圓形規律,可達空間是橢圓環面;機構的整個工作是兩者的疊加,比一般機構工作空間更大,也更靈活。
3 結論
(1)將變胞機構應用于機器人領域研究,發明一種可控機構式變胞焊接機器人,可按不同階段的工作需求改變完成。適用于多種場合,且電動機安裝在機架上,避免在鉸鏈處,導致剛性差、慣量大的問題。
(2)運用關聯矩陣法描述變胞焊接機器人在三種構態變換下的變換矩陣,有利于分析結構的工作原理和構態轉化的具體特點。通過關聯矩陣中行列二進制代碼的運算(異或運算),能準確表達機構運動前后構件與運動副的變化,并且在過程中不需要對構件和運動副進行重新編號,有利于變胞機構運動學和動力學的計算機分析。
(3)針對這種新型變胞焊接機器人機構的結構和連接特點,采用李群李代數旋量對整個系統進行運動學方程建模分析,得出機構的閉環約束方程。
(4)通過工作空間仿真分析,其工作空間比一般的機構工作空間更大,也更靈活。
[1]Dai J S,Rees-Jones J.New Configuration Model ofCartons and Their Operation[J].Science and Technology Report,1997,(97).
[2]Dai J S,Rees-Jones J. Structure and Mobility of Cartons in Cartoning Process[J]. Science and Technology Report,1997,(97).
[3]Dai J S,Rees-Jones J.Theory on Kinematic Synthesis and Motion Analysis of Cartons[J]. Science and Technology Report, 1997,(97).
[4]戴建生,丁希侖,鄒慧君.變胞原理和變胞機構類型[J].機械工程學報,2005, (6):7-12.
[5]潘宇晨,蔡敢為,王紅州,等.具有變胞功能的電動裝載機構構態進化拓撲結構分析與基因建模[J].機械工程學報,2013,(2):38-46.
[6]吳艷榮,金國光,李東福,等.描述變胞機構構態變換的鄰接矩陣法[J].機械工程學報,2007,(7):23-26.
[7]劉秀蓮,張校東.旋量理論的變胞機構全構態動力學模型[J].黑龍江科技學院學報,2013,(3):242-245.
[8]吳艷榮,金國光,李東福,等.描述變胞機構構態變換的鄰接矩陣法[J].機械工程學報,2007,(7):23-26.
[9]王汝貴,姜永圣,蔡敢為.一種變胞式碼垛機器人機構設計分析[J].Equipment Manufacturing Technology,2013,(2):18-20.
Welding Robot’s Topological Analysis and Kinematics Modeling Analysis with the Function of Metamorphic Mechanism
HUANG minxiong1,XU Gang1,CAI Ganwei2,DAI Jiansheng3,4
(1. Hunan Automotive E ngineering Vocation College,Zhuzhou 412001;2.College of Mechanical Engineering, Guangxi University, Nanning 530004;3.Ki ng’s College, University of London, London WC2R 2LS, UK; 4. Key Laboratory for Mechanism Theory and Equipment Design of Ministry of Education, Tianjin University, Tianjin 300072)
this article us es the cor relation matrix and logicaloperation to describe metamorphic process .The method canintuitively describe the process and purpose of the structural statetransformation, and the s imple s tructure of metamorphic matrix.At the same time, combining Lie Algebra’s Screw Theory Thisarticle gives the kinematics of the robot system modeling equationand working space s imulation ,using Matlab and SimMechanicsto work space simulation, to lay the foundation for kinematicssimulation and dynamics simulation .
robot,metamorphic mechanism,correlation matrix,screw theory,matlab and simMechanics,workspace
國家自然科學基金(51075077),專利號:2015201375156。