窄巷道立體庫叉車數量配置模型研究
2015-12-19 08:36:02陳雨青蔣林飛軍事交通學院天津300161
物流科技 2015年9期
張 俊, 陳雨青, 蔣林飛, 李 欣 (軍事交通學院, 天津300161)
ZHANG Jun, CHEN Yu-qing, JIANG Lin-fei, LI Xin (Military Transportation University, Tianjin 300161, China)
0 引 言
窄巷道立體庫是一類以橫梁式立體貨架為主體, 采用窄巷道設計原理, 選用普通叉車進行搬運、 三向堆垛叉車進行存取作業的機械化倉庫, 是某應急投送基地所選用的倉庫類型之一。 在倉庫布局上, 窄巷道立體庫的出入庫口劃分為空側和陸側, 實現了陸空兩側出入庫聯動作業, 保證了陸路運輸、 物資存儲和航空投送的無縫銜接; 在功能定位上, 窄巷道立體庫在不同類型叉車的配合作業下, 可以完成倉儲管理作業以及航空投送轉運作業兩部分。 本文所研究的叉車配置方案優化問題, 主要是指在陸空聯動作業流程中, 在已知理貨區組盤效率、 存儲區存取效率和空側安檢組板效率等能力指標的情況下, 如何確定陸側、 空側普通搬運叉車和存儲區三向堆垛叉車的配置數量, 以滿足連續高效作業的需求, 使叉車的利用率達到最高, 同時不造成物資堆積或者叉車閑置。
1 建立叉車配置模型的條件和假設
為簡化窄巷道立體庫叉車配置模型, 在具體建模前, 提出以下六點條件和假設:
(1) 理貨區組盤效率、 存儲區存取效率和空側安檢組板效率是確定的, 組盤臺、 三向堆垛叉車、 安檢機和組板臺的數量是確定的, 理貨區和存儲區的面積是確定的。
(2) 搬運叉車以平均速度(vkm/h) 按最短路徑行駛, 每個托盤運輸的起點和終點是確定的。
(3) 三向堆垛叉車以平均速度按最短路徑行駛, 貨叉升降速度按平均速度計算。
(4) 在儲存區不考慮貨位對存取作業時間的影響, 統一按照平均作業時間進行計算。
(5) 安檢機的傳送帶按勻速運行, 不因物資載重而發生變化。
(6) 人工組(拆) 盤和組(拆) 板的效率足夠高, 也就是不會因為組(拆) 盤和組(拆) 板過慢而出現物資堆積或叉車閑置等待的狀況。
搬運叉車數量配置優化的目的就是在三向堆垛叉車配置方案已知的條件下, 將貨物的搬運任務合理分配給數輛叉車, 以保證作業流程不出現延遲, 并且盡量減少搬運叉車的數量, 做到成本最低、 利用率最高。
2 叉車配置模型的選擇
搬運叉車的數量配置問題與帶時間窗的車輛路徑問題(VRPTW) 類似, 標準VRPTW 可以描述為: 一個配送中心O為n個客戶提供服務(共n+1 個節點) , 配送中心擁有車輛數為M, 車輛最大容量為Q, 車輛由配送中心出發完成任務后, 回到配送中心, 第i個客戶的需求量為q, 車輛在第i個客戶處停留的時間為τi(可認為與需求量成正比) , 要求貨物送到的時間滿足時間窗(bi,fi)。 通常車輛調度的目標如下: (1) 總運輸時間最少; (2) 總時間延遲最少; (3) 車輛使用最少; (4) 車輛利用率最高。
顧客: 在搬運叉車配置問題中, 顧客指的是“ 托盤運輸任務”。 假設有n個托盤需要運輸, 用}表示這n個托盤的集合, 每個托盤都有確定的服務時間ti要求, 這里的服務時間指的是搬運叉車從叉取該托盤到移交該托盤的行駛時間。
時間窗: 搬運叉車的數量配置是在其他輸送設備已確定的情況下進行的, 在不考慮組盤的情況下, 不僅需要滿足安檢時間要求, 還要考慮三向堆垛叉車的作業時間要求, 因此這里的時間約束比較復雜, 并且對于入庫托盤和出庫托盤, 這個時間約束也有不同的含義。
對于入庫托盤, 搬運叉車承擔運輸任務的起始時間為組盤結束后將托盤貨物提交給搬運叉車的時間ei, 搬運叉車到達組盤區的時間不能遲于ei, 搬運叉車如果提前到達, 必須等待。 搬運叉車將托盤物資運至存儲區后, 是否能夠及時存入, 還要看三向堆垛叉車是否空閑。 因此, 搬運叉車的配置方案與三向堆垛叉車的作業密切相關。
對于出庫托盤, 搬運叉車承擔運輸任務的起始時間為三向堆垛叉車將托盤物資提交給搬運叉車的實際時間Di, 終止時間為叉車將托盤提交給組盤區的時間ei, 根據ei反推出三向堆垛叉車將托盤提交給搬運叉車的最遲時間fi, 如果三向堆垛叉車處于空閑狀態, 可以提前將托盤提交給搬運叉車, 這時搬運叉車提前到達組盤區, 并等待至時間ei, 開始進行組盤作業。
頂點:nk(p)表示在第p輛搬運叉車的路徑中, 第k個搬運的托盤
運輸成本: 從搬運叉車運輸托盤i到叉車運輸托盤j之間的成本用sij表示, 這里將其定義為搬運叉車從托盤i的終點至托盤j的起點之間的空載行駛時間。
路徑計劃: 路徑計劃R包含一系列路徑路徑數等于需要的叉車數量, 每個托盤都必須只能被一輛搬運叉車搬運, 即要滿足以下條件:
優化目標: 搬運叉車的工作狀態有三種: 滿載行駛、 空載行駛和排隊等待。 運輸n個托盤, 每個搬運叉車滿載行駛的總時間是固定的, 可以優化的是空載行駛和排隊等待時間, 所以考慮2 個目標: (1) 最小化搬運叉車數量; (2) 搬運叉車空載行駛時間和排隊等待時間最小化。
3 叉車配置模型的建立
3.1 模型的符號說明
n為待運輸的托盤總數。 另外, 定義兩個虛擬托盤運輸任務: 0 和n+1, 表示叉車的起始狀態和終止狀態。
i,j為托盤序號,i,j=1,2,…,n。
B為搬運叉車的最大數量, 可以根據實際情況來定這個數字。
p為搬運叉車路徑序號。
r為三向叉車序號,r=1,2,…,m。
v為搬運叉車/三向堆垛叉車在滿載/空載條件下平均速度。
ti為搬運叉車運輸第i個托盤的行駛時間,
yijr為如果第i個托盤和第j個托盤同由第r臺三向叉車交接貨物, 且第j個托盤緊接第i個托盤交接, 則yijr=1, 否則yijr=0。這可以根據三向叉車的配置方案確定。
τi為三向叉車存放(提取) 第i個托盤的作業時間(三向叉車小車行駛時間和存取時間) , 由隨機生成的托盤在存儲區中位置決定。
ei為安檢機檢查第i個托盤時與搬運叉車的計劃交接時間, 將作為隨機輸入。
di為三向叉車存取第i個托盤時與搬運叉車的計劃交接時刻
cij為三向叉車從托盤i的位置到托盤j的位置之間的行駛時間。
sij為搬運叉車從運輸托盤i的終點到運輸托盤j的起點之間的空載行駛時間, 其中因為左理貨區的搬運叉車只負責入庫操作, 右理貨區的搬運叉車只負責出庫操作, 所以sij=ti。
Li為第i個托盤的流向
B為一個足夠大的正數。
xih為決策變量
zijh為決策變量
Di為決策變量, 三向叉車存取第i個托盤時與搬運叉車的實際交接時刻。
v為決策變量, 搬運叉車路徑數。
Fi為從屬決策變量, 搬運叉車完成第i個托盤運輸任務的時刻,
Fh,max為從屬決策變量, 第h輛搬運叉車完成最后一個托盤交接任務的時間
3.2 優化目標和模型建立
目標函數為:
約束條件為:
該模型中, 式(1) 為第一個目標函數, 即最小化搬運叉車作業總臺時; 式(2) 為第二個目標函數, 即最小化搬運叉車空駛時間。 約束條件中, 式(3) 保證一個托盤由一輛搬運叉車運輸; 式(4) 和式(5) 表示有v輛搬運叉車參與作業; 式(6)保證如果zijh=1, 則xih=xjh=1; 式(7) 和式(8) 表示由同一輛搬運叉車運輸的托盤中, 每個托盤只有一個前項和一個后項;式(9) 保證每個任務的實際開始作業時間滿足時間窗要求; 式(10) 是對三向叉車作業時間的約束; 式(11) 是對搬運叉車運輸時間的約束; 式(12) 至式(15) 是對決策變量的取值范圍約束。
3.3 模型的應用
該模型的提出可有效解決某基地窄巷道立體庫的叉車數量配置這一實際問題。 已知該庫在陸空聯動作業條件下陸側入庫和空側出庫平均效率指標均為48 托盤/小時。 在實際選型過程中, 采用三種形式的叉車: 1 噸蓄電池叉車、 3 噸蓄電池叉車、1.5 噸三向堆垛叉車。 其中, 1 噸蓄電池叉車負責搬運托盤物資, 3 噸蓄電池叉車負責搬運異形物資、 大件物資, 1.5 噸三向堆垛叉車進行無軌高架立體庫的物資搬運。
基地窄巷道立體庫平面布局圖如圖5 所示:
基地窄巷道立體庫配套叉車、 存儲區橫梁式立體貨架以及物資安檢設備基本技術參數如表1 所示:
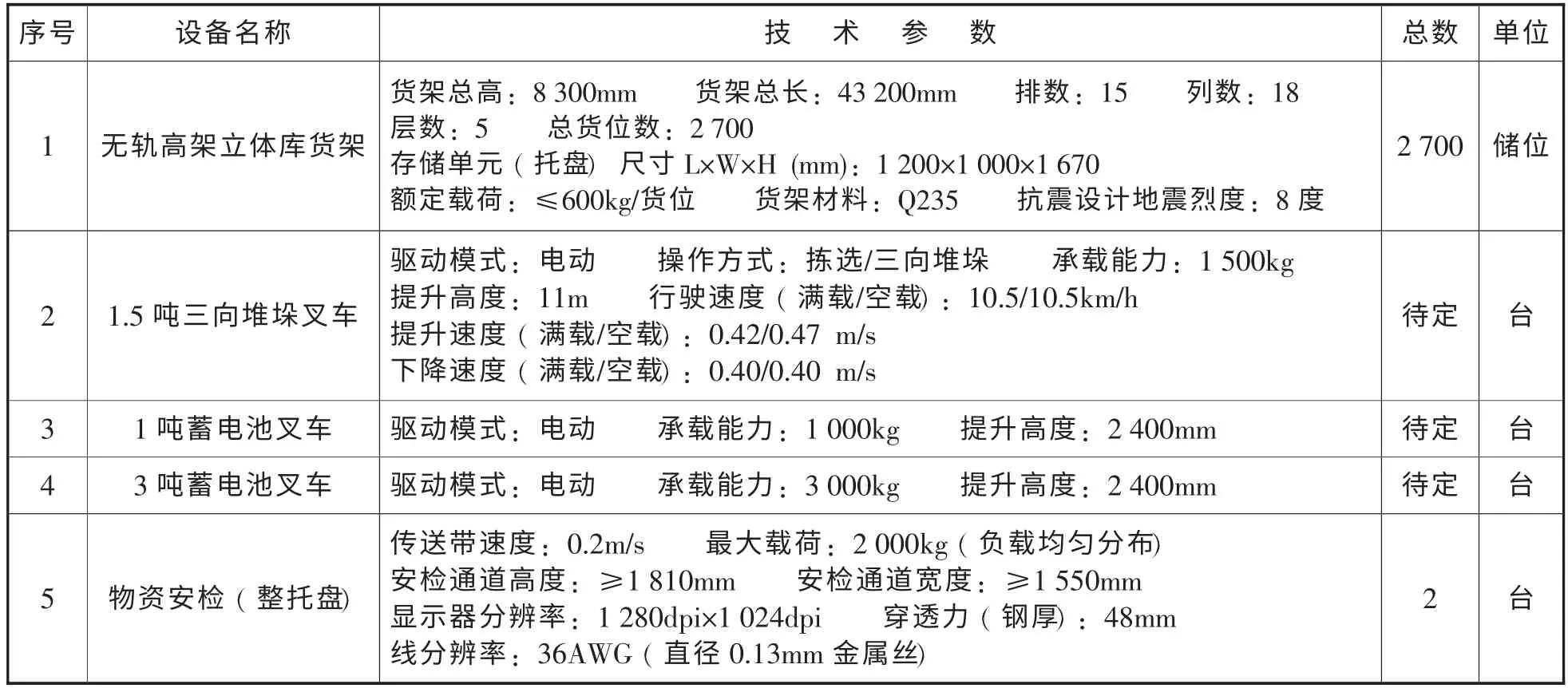
表1 基地窄巷道立體庫配備設備基本技術參數
通過建模求解, 易得出基地窄巷道立體庫叉車數量配置最優方案如下: 1.5 噸三向堆垛叉車2 臺, 1 噸蓄電池叉車5 臺, 3噸蓄電池叉車1 臺。
4 結束語
本文通過建立窄巷道立體庫叉車數量配置模型, 研究如何合理配置庫內陸、 空側普通搬運叉車和存儲區三向堆垛叉車的配置數量, 以達到高效作業以及資源優化的目的, 可以作為確定各應急投送基地窄巷道立體庫型內叉車數量配置的基本依據和方法。 由于本論文在研究建模過程中主要以理論分析為主, 具體工作時還需要建立倉庫任務相關信息的數據庫, 以及綜合考慮倉庫布局、 叉車性能參數、 系統誤差和人為誤差。 另外, 由于基地該庫型還未正式投入使用, 模型的合理性有待進一步驗證和擬合。
[1] 孫焰. 現代物流管理技術——建模理論及算法設計[M]. 上海: 同濟大學出版社, 2004.
[2] 丁以中, Jennifer S. Shang. 管理科學——運用Spreadsheet 建模和求解[M]. 北京: 清華大學出版社, 2003.
[3] 王宗喜. 軍事物流學[M]. 北京: 清華大學出版社, 2007:274-277.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
核科學與工程(2015年4期)2015-09-26 11:59:03
兒童故事畫報(2013年3期)2013-06-24 05:40:30
