基于Riccati方程解的高增益未知輸入觀測器設計
2015-12-19 00:55:12朱芳來張永軍
北京航空航天大學學報 2015年1期
朱芳來,張永軍
(同濟大學 電子與信息工程學院,上海200092)
從20世紀70年代開始,未知輸入觀測器設計一直是現代控制研究領域所關注的熱點之一.未知輸入觀測器(UIO)不僅被廣泛地應用到控制系統中,同時在故障診斷和基于混沌同步的保密通訊[1]等領域也有著重要的應用.發展至今,未知輸入觀測器設計無論是針對線性系統還是非線性系統,都已經有眾多的研究成果呈現[2-3].早期,未知輸入觀測器設計著重于如何繞開未知輸入的影響而達到狀態估計的目的[4],之后未知輸入與狀態一并估計的方法[5]得到了重視.
未知輸入和測量噪聲并存,在實際的控制系統中普遍存在.因而,對同時具有測量噪聲和未知輸入的系統進行所謂的未知輸入觀測器設計,更具有挑戰性,成為近期學者們所關注的研究熱點之一[6].例如,文獻[7]采用了降維觀測器設計方法,通過選取恰當的降維觀測器增益,有效處理了一類具有未知輸入和測量噪聲的線性系統的狀態和噪聲估計及未知輸入重構問題.Bejarano等處理了具有相同未知輸入和測量噪聲的一類強可檢測的奇異線性系統的觀測器設計、未知輸入重構及噪聲估計,并討論系統強可觀和檢測的充要條件[8].描述系統,也稱之為奇異系統,經常被用來描述工程系統、社會系統和經濟系統等實際系統[9-10].由于描述系統在處理具有輸出測量噪聲的系統時,可以方便地把輸出噪聲當作描述系統的擴展狀態,因而該方法在觀測器設計中被廣泛使用[11-13].例如,文獻[8]針對具有相同未知輸入和測量噪聲的非線性系統結合描述系統方法提出了全維觀測器設計方法.文獻[14]結合描述系統、滑模理論和自適應控制的方法,針對一類非線性系統提出了一種系統狀態和噪聲同時估計的自適應魯棒觀測器,該方法同樣實現了對未知輸入的重構.文獻[15]提出了一種魯棒H∞滑模描述觀測器,對具有未知輸入或者輸出干擾的不確定系統提出了狀態估計及未知輸入重構方法.
從上面對具有輸出測量噪聲和未知輸入觀測器的研究動態分析可以看出,把輸出測量噪聲看作描述系統的擴展狀態已經成為十分有效的方法.在描述系統的基礎上如何進一步地設計具有魯棒性的觀測器,具有重大研究意義.本文嘗試在描述系統的基礎上,利用通過求解Riccati方程的方法,構造觀測器增益矩陣,以此提出估計一類Lipschitz非線性系統的狀態和測量噪聲的方法,同時還考慮了對未知輸入重構的問題.
1 問題描述
考慮如下具有未知輸入和測量噪聲的非線性系統:

其中,x∈Rn,y∈Rp,u∈Rm分別為系統的狀態、可測輸出和已知控制輸入;η∈Rr為未知輸入;ω∈Rw為測量噪聲;A∈Rn×n,B∈Rn×s,D∈Rn×r,C∈Rp×n和 E∈Rp×w為已知矩陣.假設系統(A,C)可觀,矩陣B,D和E都是列滿秩的,C是行滿秩的,并且滿足 rank[B D]=s+r.
假設1 非線性項函數 f(x,u)∈Rs滿足Lipschitz條件,即存在一個Lipschitz常數γ使得


2 觀測器設計
對于描述系統(3),考慮如下觀測器:

其中,ζ∈Rn+w為觀測器狀態;∈Rn+w為擴展狀態 估 計;N ∈ R(n+w)×(n+w),L ∈ R(n+w)×p,G ∈R(n+w)×n和 F∈R(n+w)×p為需要設計的矩陣.
引理1 存在矩陣G和F滿足:

證明 式(5)可以寫為XR=In+w,其中

而

由于矩陣E是列滿秩,所以R是列滿秩的,這意味著RTR可逆,因而R的右逆R+=(RTR)-1RT存在,且R+R=In+w.
取X=R+-Y(In+p-RR+),則它為 XR=In+w的解,其中 Y∈Rn×(n+p)可以取為任意矩陣.當計算出X后,就可以得到
證畢
現定義擴展狀態估計誤差為

即


并再記M=-GD∈Rn×r,則誤差方程就可化為

有關代數方程(8),有如下的引理.
引理2 對任意的矩陣K∈R(n+w)×p,如下定義的矩陣:
滿足式(8).
證明 直接代入式(8)驗證即可.
對于滿足式(8)的任意解N和L,至少存在一個矩陣K∈R(n+w)×p使得N和L可以分別有式(10)和式(11)的形式.事實上,K=(L+NF)就是一個滿足要求的K.
由前面的討論知道,對任意的矩陣Y和K,由式(6)、式(10)和式(11)所確定的矩陣 G,F,N和L可以使觀測器誤差方程具有式(9)的形式.本文試圖確定矩陣K,使得誤差方程(9)具有任意小鄰域收斂意義下的零平衡狀態,即使得系統(4)是系統(3)的觀測器.
進一步地,觀測器誤差方程(9)可以等價地寫為


引理 3[18-19]假設系統(+ αI,H,)是最小項系統,,H 滿秩,并且 rank()=rank(H),那么 Riccati方程(13)的解Q(π)滿足
定理1 在引理3同樣的前提條件下,則Riccati方程(13)有正定解,這時只要取 K=Q,則系統(4)是系統(3)任意小鄰域收斂意義下的觀測器.
證明 考慮Lyapunov函數V(t)=eTQ-1e,則它沿著誤差方程(9)的微分是

由于

由式(13)得到

上式代入式(14)得到


即
對于任意的a>0,有
于是,得到

只要取充分大的π,上式就說明,誤差e在充分小的鄰域內收斂到零.
證畢
在得到了擴展狀態的估計后,可以由如下的方式得到原系統狀態和測量噪聲的估計分別如下:
上述證明驗證了Riccati方程求解矩陣K的有效性,結合引理1和引理2,觀測器設計算法步驟如下.
步驟1 按式(6)求出矩陣G和F;
步驟2 取充分大的正數α和π,求解代數Riccati方程(13),得到正定矩陣解Q,并根據K=Q計算出 K;
步驟3 將K的值代入式(10)和式(11)分別得到矩陣N和L.
3 未知輸入重構
本節在狀態得到估計的前提下,提出一種未知輸入代數重構方法.該方法能對未知輸入的最小二乘最優解進行任意領域收斂估計.同時,為了在重構中避免可測輸出微分信息的使用,本文還基于他人的前期研究,考慮了一種二階高增益滑模觀測器,用于估計可測輸出的微分.
由系統(3),在等式兩邊同時左乘矩陣G得

將式(5)代入式(16),化簡得


可知未知輸入的最小二乘最優解為

其中 W+=(WTW)-1WT.
由式(18)可知,為了重構未知輸入的最小二乘最優解,必須事先知道可測輸出的微分.為此,本文引入二階高增益滑模觀測器對輸出的微分進行估計.
由式(17)知

令
則有
基于Levant[20]的工作,可以引入二階高增益滑模觀測器獲取原系統的輸出微分估計.

定理2[20]在未知輸入有界的條件下,如下二階系統:是式(19)的高階滑模觀測器,該觀測器不僅精確地估計出yi,而且在有限時間內能精確估計yi的微分.具體而言和 ξ =是輸出y及的精確估計.其中 λi,1和 λi,2是需要合理選取的觀測增益.
基于觀測器(4)所給出的擴展狀態估計和式(20)所提供的系統輸出微分的估計,提出能對未知輸入最小二乘最優解式(18)進行重構的方法如下:

4 仿真分析
考慮單連桿柔性關節機器人模型作為仿真對象,描述成系統(1)的形式:

非線性項 f(x,u)=1.3sin x1+u,未知輸入項η(t)=2.5sin(3t+1),輸出測量噪聲ω(t)=15cos(10t+3).假設初始的狀態x1(0)=x2(0)=x3(0)=x4(0)=1,初始的狀態估計,噪聲初始估計值(0)=2.
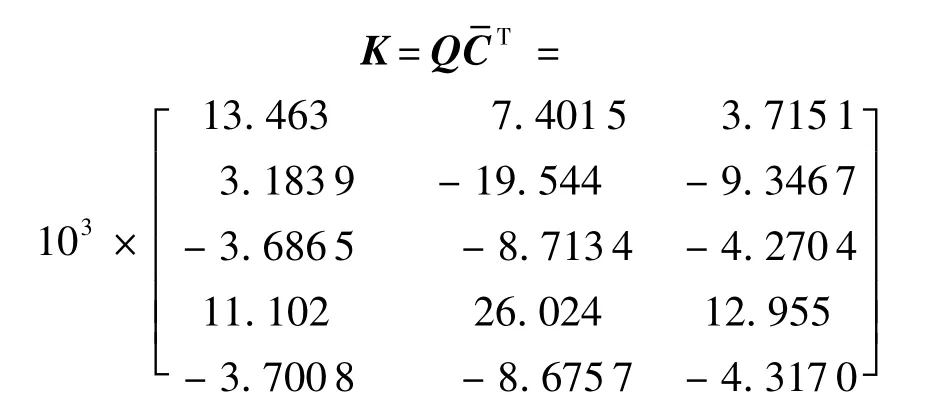
根據式(6)可以計算出G和F,限于篇幅,具體值沒有給出.取正數α=0.05和π=109,通過式(13)可以求得Q,然后計算出:
又由式(10)和式(11),可以計算出N和L,限于篇幅,略去具體值的給出.計算出相應的矩陣值之后,就可以根據式(4)構造能夠同時對狀態和測量噪聲估計的觀測器.狀態估計效果由圖1~圖4給出,而測量噪聲的重構效果由圖5提供.從圖1~圖5可以看出,無論是狀態估計,還是測量噪聲的重構,效果令人滿意.

圖1 狀態(t)對x1(t)的跟蹤Fig.1 Track of(t)to x1(t)

圖2 狀態(t)對x2(t)的跟蹤Fig.2 Track of(t)to x2(t)
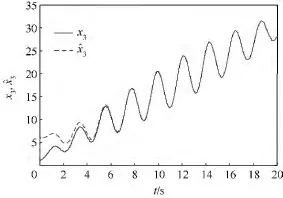
圖3 狀態(t)對x3(t)的跟蹤Fig.3 Track of(t)to x3(t)
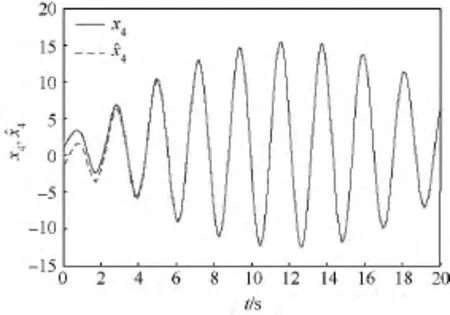
圖4 狀態(t)對x4(t)的跟蹤Fig.4 Track of(t)to x4(t)
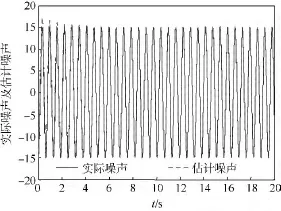
圖5 估計噪聲及實際噪聲Fig.5 Estimation of noise and the actual noise
為了重構未知輸入,必須知道原系統有限時間內的輸出微分估計,這可由二階高增益滑模觀測器(20)給出.圖6分別給出了的估計誤差.圖7給出了未知輸入重構效果.
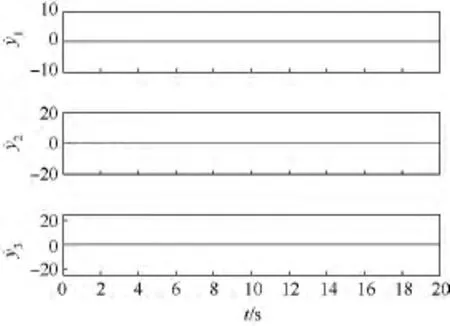
圖6 輸出微分的估計誤差Fig.6 Estimation error of the output differential
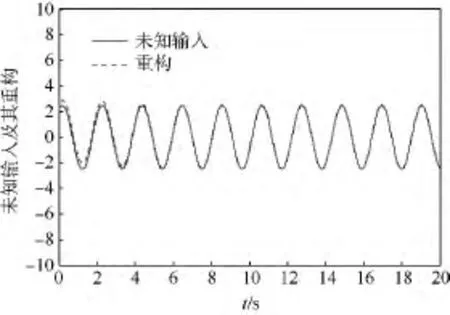
圖7 未知輸入及其重構Fig.7 Unknown input and its reconstruction
5 結論
本文綜合研究具有未知輸入和噪聲的一類非線性系統,經試驗驗證表明:
1)提出了狀態估計和未知輸入和測量噪聲同時重構的方法.
2)本文的方法可以有效地抵消系統未知輸入項給觀測器帶來的影響,即在不知道未知輸入的情況下,實現對系統狀態任意小鄰域收斂估計.
3)本文還結合二階高增益滑模觀測器,提出了一種未知輸入代數重構方法,且方法具有不必用到系統可測輸出微分信息的優點.
References)
[1] Boutayeb M,Darouach M,Rafaralahy H.Generalized state-space observers for chaotic synchronization and secure communication[J].IEEE Transactions on Circuits System-I:Fundamental Theory and Applicatins,2002,49(3):345-349.
[2] Wang S H,Davison E J,Dorato P.Observing the states of systems with unmeasurable disturbance[J].IEEE Transactions on Automatic Control,1975,AC-20:716-717.
[3] Kudva P,Viswanadham N,Ramakrishna A.Observers for linear systems with unknown inputs[J].IEEE Transactions on Automatic Control,1980,AC-25:113-115.
[4] Yang F Y,Wilde R W.Observer for linear systems with unknown inputs[J].IEEE Transactions on Automatic Control,1988,33(7):677-681.
[5] Zhu F L.State estimation and unknown input reconstruction via both reduced-order and high-order sliding mode observers[J].Journal of Process Control,2012,22(1):296-302.
[6] Bejarano F J,Floquet T,Perruquetti W,et al.Observability and detectability of singular linear systems with unknown inputs[J].Automatica,2013,49(3):793-800.
[7] Yang J Q,Zhu F L,Sun X.State estimation and simultaneous unknown input and measurement noise reconstruction based on associated observers[J].International Journal of Adaptive Control and Signal Processing,2013,27(10):846-858.
[8] Bejarano F J,Floquet T,Perruquetti W,et al.Observability and detectability of singular linear systems with unknown inputs[J].Automatica,2013,49(3):793-800.
[9] Duan G R.Analysis and design of descriptor linear system[M].New York:Spring-Verlag New York Inc,2010.
[10] Sentouh C,Mammar S,Glaser S.Simultaneous vehicle state and road attributes estimation suing unknown input proportional-integral observer[C]//IEEE Intelligent Vehicles Symposium Eindhoven.New York:IEEE,2008:690-696.
[11] Wang Z,Shen Y,Zhang X,et al.Observer design for discretetime descriptor systems:an LMI approach[J].System & Control Letters,2012,61(6):683-687.
[12] Darouach M.On the functional observers for linear descriptor systems[J].Systems & Control Letters,2012,61(3):427-434.
[13] Koenig D.Observer design for unknown input nonlinear descriptor systems via convex optimization[J].IEEE Transactions on Automatic Control,2006,51(6):1047-1052.
[14] Dimassi H,Loria A,Belghith S.Continuously-implement sliding-mode adaptive unknown-input observer under noisy measurements[J].Systems & Control Letters,2012,16:1194-1202.
[15] Lee D J,Park Y,Park Y-S.Robust H∞sliding mode descriptor observer for fault and discrete time descriptor system[J].IEEE Transactions on Automatic Control,2012,57(12):2928-2012.
[16] Saberi A,Sannuti P,Chen B M.H2Optimal control[M].Englewood Cliffs,NJ:Prentice-Hall,1995,57(11):145-168.
[17] Lewis F L.Applied optimal control and estimation[M].Englewood Cliffs,NJ:Prentice-Hall,1992:176-184.
[18] Doyle J C,Stein G.Robustness with observers[J].IEEE Transations on Automatic Control,1979,AC-24:607-611.
[19] Kwakernaak H,Sivan R.Linear optimal control systems[M].New York:Wiley,1972:193-198
[20] Levant A.High-order sliding modes:differentiation and outputfeedback control[J].International Journal of Control,2003,76(9-10):924-941.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
