具有校正項(xiàng)的K分布形狀參數(shù)的V-估計(jì)器
2015-12-19 00:55:32李大朋
北京航空航天大學(xué)學(xué)報(bào) 2015年1期
關(guān)鍵詞:實(shí)驗(yàn)
李大朋
(中國(guó)科學(xué)院 光電研究院,北京100094)
迄今,人們提出了許多K分布形狀參數(shù)的估計(jì)方法(見(jiàn)文獻(xiàn)[1-9]).其中,極大似然估計(jì)方法(MLE)理論上給出了最優(yōu)的v參數(shù)估計(jì)[10].不過(guò),由于MLE的估計(jì)過(guò)程涉及冗繁的、十分低效的二維數(shù)值計(jì)算,一般不具有實(shí)際應(yīng)用價(jià)值.因此,計(jì)算比較簡(jiǎn)單的矩估計(jì)(MOM)就成了對(duì)v參數(shù)估計(jì)的最常用的方法.
在眾多矩估計(jì)器中,比較典型的是Oliver提出的U,V和W 3種K分布形狀參數(shù)估計(jì)器[11].
眾所周知,估計(jì)器的性能由兩個(gè)因素決定:一是估計(jì)的精確性即估計(jì)精度,二是計(jì)算的復(fù)雜程度即估計(jì)效率.Blacknell[12]分析了 U,V 和 W 估計(jì)器的精度,得到的結(jié)論是U估計(jì)器的估計(jì)精度最高.但估計(jì)器U和W對(duì)形狀參數(shù)v的關(guān)系式是非線性函數(shù),轉(zhuǎn)換時(shí)需要很大的計(jì)算量;而V-估計(jì)器可直接求得對(duì)v的估計(jì)值,則從估計(jì)求解的復(fù)雜性來(lái)看,V-估計(jì)器的估計(jì)效率最高.
另外,在實(shí)踐中人們發(fā)現(xiàn),V-估計(jì)器估計(jì)精度不高的另一不良現(xiàn)象是,估計(jì)結(jié)果有時(shí)會(huì)出現(xiàn)異常大的奇異值,甚至出現(xiàn)v<0等實(shí)際中不可能出現(xiàn)的誤估計(jì)情況.這些問(wèn)題的出現(xiàn)嚴(yán)重影響了V-估計(jì)器在實(shí)際中的應(yīng)用.
自O(shè)liver提出U,V和W估計(jì)器以來(lái),人們一直在致力于探索出一種對(duì)K分布形狀參數(shù)v進(jìn)行估計(jì)的同時(shí)具有高精度、高效率的新型矩估計(jì)器,至今未見(jiàn)明顯進(jìn)展.
本文提出一種具有校正項(xiàng)的V-估計(jì)器,它克服了前述V-估計(jì)器的缺點(diǎn),既保持了與V-估計(jì)器相同的估計(jì)效率,同時(shí)又具有很高的估計(jì)精度.仿真實(shí)驗(yàn)表明,從估計(jì)效率以及估計(jì)均值、估計(jì)偏差和估計(jì)標(biāo)準(zhǔn)差3方面的綜合考慮,這種帶校正項(xiàng)的V-估計(jì)器優(yōu)于U-估計(jì)器.
1 對(duì)V-估計(jì)器的改進(jìn)
1.1 V-估計(jì)器及其偏差分析
1993年,Oliver[11]提出了3 種著名的 K 分布形狀參數(shù)的矩估計(jì)器.其中的V-估計(jì)器(VE)形式如下:

其中
把1/T1=1/[z]2在它的均值點(diǎn) <z> 處展開(kāi)直到含有1/N項(xiàng),則得

設(shè)ΔV為V-估計(jì)器的偏差,則借助式(4)有
即得
中的ΔN1為校正項(xiàng).由式(5)、式(6)可得

1.2 校正項(xiàng)和校正系數(shù)
為進(jìn)一步提高估計(jì)精度,借鑒文獻(xiàn)[13-14]通過(guò)實(shí)驗(yàn)手段,用經(jīng)驗(yàn)值來(lái)確定估計(jì)器公式中待定常數(shù)的方法,現(xiàn)給出具有校正項(xiàng)的 V-估計(jì)器(VCE)的表達(dá)式如下:其中,常數(shù)j稱(chēng)為校正系數(shù),其確定方法見(jiàn)1.3節(jié).以下先給出式(10)的證明:由式(7),顯然有,注意到式(5)和式(6),則
1.3 校正系數(shù)的確定
眾所周知,對(duì)于K分布形狀參數(shù)v,v∈[0.2,2]的范圍具有突出的重要意義.這是因?yàn)椋怆s波對(duì)雷達(dá)信號(hào)處理的影響很大,特別是在尖雜波背景下進(jìn)行恒虛警處理時(shí),通過(guò)估計(jì)器估計(jì)得到的形狀參數(shù)v值的大的誤差,會(huì)造成虛警概率的急劇升高而引起大的信噪比損失[15].所以,在實(shí)際的雷達(dá)信號(hào)處理中,人們更加注意尖雜波參數(shù)v∈[0.2,2]的范圍.基于此,本文以 v∈[0.2,2]的范圍為重點(diǎn)來(lái)確定校正系數(shù)j的滿(mǎn)足實(shí)際應(yīng)用的取值.
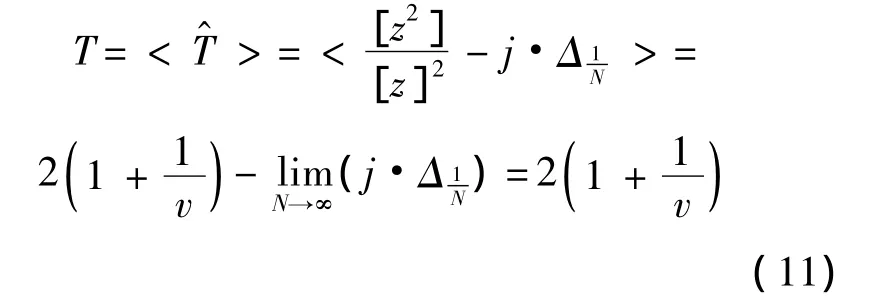
實(shí)驗(yàn)表明,校正系數(shù)j具有顯著地調(diào)節(jié)VCE的估計(jì)均值、偏差和標(biāo)準(zhǔn)差的作用.搜索校正系數(shù)j的實(shí)驗(yàn)是在[-3,3]的范圍內(nèi)以0.1為步長(zhǎng)進(jìn)行的.為便于說(shuō)明,圖1僅給出校正系數(shù)j分別取值0,1,2,2.5 和 3 情況下,相應(yīng)估計(jì)器同時(shí)經(jīng)10000次Monte-Carlo實(shí)驗(yàn),所得估計(jì)均值的比較圖.實(shí)驗(yàn)條件:樣本長(zhǎng)度N=250,K分布形狀參數(shù)v∈[0.2,2],實(shí)驗(yàn)步長(zhǎng)為 0.2.由圖1可見(jiàn),校正系數(shù)j=2.5時(shí)的估計(jì)均值最好,故取校正系數(shù)j=2.5.需指出,j=0時(shí)的 VCE其實(shí)就是 VE即Oliver提出的V-估計(jì)器,而其在實(shí)驗(yàn)中所得均值遠(yuǎn)偏離j=2.5時(shí)的VCE得到的近乎理想的情況.這一事實(shí)驗(yàn)證了VCE中校正項(xiàng)和校正系數(shù)的突出作用.
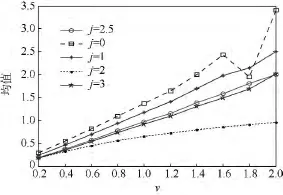
圖1 在估計(jì)器VCE中,校正系數(shù)j取不同值所得估計(jì)均值比較Fig.1 Comparison of estimating mean value obtained by the VCE for different corrective coefficient j
圖2給出在同一實(shí)驗(yàn)中,校正系數(shù)j取不同值所得估計(jì)偏差的比較.
圖2凸顯了VCE的優(yōu)越性:在校正系數(shù)j=2.5時(shí),VCE對(duì)K分布形狀參數(shù)v估計(jì)的偏差仍然顯著優(yōu)于j取值的其他情況,遠(yuǎn)優(yōu)于包括j=0時(shí)的VCE即V-估計(jì)器得到的估計(jì)偏差.十分可貴的是,圖2中大多數(shù)估計(jì)器所得估計(jì)偏差呈現(xiàn)隨著v增大而增大的不良趨勢(shì),而j=2.5時(shí)的VCE的估計(jì)偏差卻呈現(xiàn)隨著v增大而減小的良好趨勢(shì)并等于或接近于0.
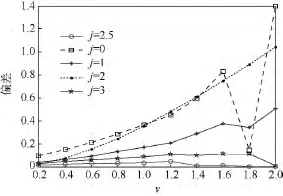
圖2 在估計(jì)器VCE中,校正系數(shù)j取不同值所得估計(jì)偏差比較Fig.2 Comparison of estimating bias obtained by the VCE for different corrective coefficient j
圖3給出在同一實(shí)驗(yàn)中,校正系數(shù)j取不同值所得估計(jì)標(biāo)準(zhǔn)差的比較.
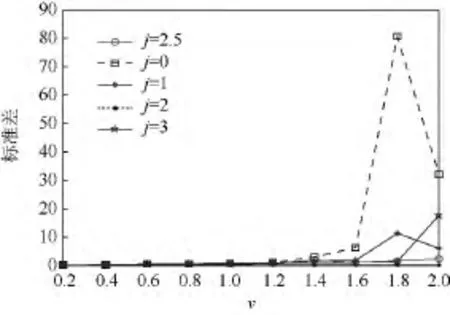
圖3 在估計(jì)器VCE中,校正系數(shù)j取不同值所得估計(jì)標(biāo)準(zhǔn)差比較Fig.3 Comparison of estimating standard error obtained by the VCE for different corrective coefficient j
從圖3粗看起來(lái),似乎j=2時(shí)的VCE所得標(biāo)準(zhǔn)差精度最好.但實(shí)際是,從圖1、圖2易見(jiàn),j=2時(shí)的VCE所得均值和偏差精度卻最低.j=3也有類(lèi)似情況.所以,從估計(jì)均值、估計(jì)偏差和估計(jì)標(biāo)準(zhǔn)差全面衡量,VCE中的校正系數(shù)j=2.5最為合適.而且,從圖3可以看到,j=0時(shí)的VCE即V-估計(jì)器得到的估計(jì)標(biāo)準(zhǔn)差在v=1.6處出現(xiàn)了奇異情況.這再次驗(yàn)證了VCE中校正項(xiàng)和校正系數(shù)對(duì)提高估計(jì)精度的顯著作用.
由此,必須強(qiáng)調(diào),以后本文所指VCE就是校正系數(shù)j=2.5時(shí)的VCE.
2 仿真實(shí)驗(yàn)
圖4~圖6給出了通過(guò)仿真實(shí)驗(yàn),VE,VCE和U估計(jì)器在估計(jì)均值、偏差和標(biāo)準(zhǔn)差3個(gè)方面的比較.
圖4 U,VE和VCE估計(jì)器所得對(duì)v的估計(jì)的均值比較Fig.4 Comparison of mean value for estimating v obtained by U,VE and VCE
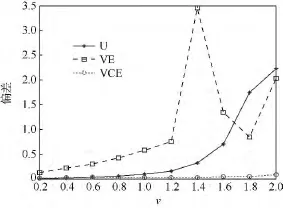
圖5 U,VE和VCE估計(jì)器所得對(duì)v的估計(jì)的偏差比較Fig.5 Comparison of bias for estimating v obtained by U,VE and VCE
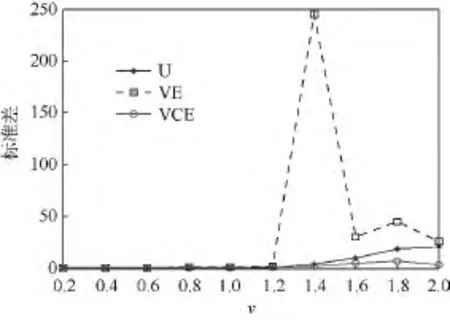
圖6 U,VE和VCE估計(jì)器所得對(duì)v的估計(jì)的標(biāo)準(zhǔn)差比較Fig.6 Comparison of standard error for estimating v obtained by U,VE and VCE
實(shí)驗(yàn)條件:樣本長(zhǎng)度N=100,K分布形狀參數(shù) v∈[0.2,2],實(shí)驗(yàn)步長(zhǎng)為 0.2,10000次 Monte-Carlo實(shí)驗(yàn).
圖4~圖6表明,在重要的 v∈[0.2,2]的v值范圍內(nèi),從估計(jì)均值考慮,VCE的估計(jì)均值的精度顯著優(yōu)于U-估計(jì)器,更是優(yōu)于VE;而從估計(jì)偏差考慮,VCE的估計(jì)偏差的精度同樣是明顯優(yōu)于VE,并且隨著v值的增大,越來(lái)越更加優(yōu)于U-估計(jì)器;再?gòu)墓烙?jì)的標(biāo)準(zhǔn)差考慮,VCE在v∈[0.2,1.2]范圍內(nèi),估計(jì)標(biāo)準(zhǔn)差的精度基本等于U-估計(jì)器的精度,卻仍然遠(yuǎn)高于VE的估計(jì)精度.而在 v∈[1.2,2]的范圍內(nèi),即隨著 v值的增大,所得標(biāo)準(zhǔn)差卻越來(lái)越明顯好于U-估計(jì)器.于是,從估計(jì)均值、估計(jì)偏差和估計(jì)標(biāo)準(zhǔn)差3方面的精度情況全面考慮,應(yīng)該認(rèn)為,實(shí)驗(yàn)中VCE在估計(jì)精度上不但顯著優(yōu)于VE,同時(shí)也優(yōu)于U-估計(jì)器.而從估計(jì)的效率考慮,VCE和VE一樣,具有估計(jì)過(guò)程中不需要求解非線性方程,直接給出對(duì)v的估計(jì)值的高效率,這是包括U-估計(jì)器在內(nèi)的,必須通過(guò)求解非線性方程進(jìn)行估計(jì)的所有矩估計(jì)器所無(wú)法具有的突出優(yōu)點(diǎn).
需指出,圖1~圖3的實(shí)驗(yàn)結(jié)果是在樣本長(zhǎng)度N=250的條件下得到的,而圖4~圖6的實(shí)驗(yàn)結(jié)果是在樣本長(zhǎng)度N=100的情況下獲得的.因此,有關(guān)仿真實(shí)驗(yàn)還表明了這樣一個(gè)可貴事實(shí):不論是在大樣本情況下還是在小樣本情況下,VCE的估計(jì)精度具有對(duì)樣本長(zhǎng)度的較為廣泛的適應(yīng)性.相反,由圖4~圖6的實(shí)驗(yàn)可見(jiàn),VE與U估計(jì)器對(duì)小樣本情況的適應(yīng)性是比較差的.
3 結(jié)論
1)本文提出的具有校正項(xiàng)的V估計(jì)器VCE,在保留與VE同樣高的估計(jì)效率的同時(shí),顯著提高了估計(jì)的精度,在估計(jì)均值、估計(jì)偏差和估計(jì)標(biāo)準(zhǔn)差3個(gè)方面全面明顯超過(guò)VE估計(jì)器.
2)仿真實(shí)驗(yàn)表明,本文提出的具有校正項(xiàng)的V-估計(jì)器VCE,在小樣本情況下,對(duì)K分布形狀參數(shù)v估計(jì)的精度與效率都優(yōu)于U-估計(jì)器.VCE對(duì)樣本長(zhǎng)度有著較為廣泛的適應(yīng)性,更便于在實(shí)踐中應(yīng)用.
References)
[1] Blacknell D,Tough R J A.Parameter estimation for the K-distribution based on[z log(z)][J].IEE Proceedings:Radar,Sonar and Navigation,2001,148(6):309-312.
[2] 李永晨,劉瀏.SAR圖像統(tǒng)計(jì)模型綜述[J].計(jì)算機(jī)工程與應(yīng)用,2013,49(13):184-190.Li Y C,Liu L.Review of statistical method of SAR image[J].Computer Engineering and Applications,2013,49(13):184-190(in Chinese).
[3] 孫增國(guó).基于第二類(lèi)統(tǒng)計(jì)量的K分布參數(shù)估計(jì)[J].計(jì)算機(jī)應(yīng)用研究,2013,30(1):1-4.Sun Z G.Parameter estimation of K distribution based on secondkind statistics[J].Application Research of Computers,2013,30(1):1-4(in Chinese).
[4] 李亞超,周瑞雨,全英匯,等.自適應(yīng)背景窗的艦船目標(biāo)檢測(cè)算法[J].西安交通大學(xué)學(xué)報(bào),2013,36(3):1-6.Li Y C,Zhou R Y,Quan Y H,et al.An algorithm of ship target detection based on the adaptive background window function[J].Journal of Xi’an Jiaotong University,2013,36(3):1-6(in Chinese).
[5] 楊永生,張宗杰.基于分?jǐn)?shù)階矩和NM單純形算法的海雜波參數(shù)估計(jì)[J].遙感技術(shù)與應(yīng)用,2011,25(6):70-73.Yang Y S,Zhang Z J.Parameters estimation of sea clutter based on fractional order moments and NM algorithm[J].Remote Sensing Technology,2011,25(6):70-73(in Chinese).
[6] 徐偉,陳永森.一種K分布雜波參數(shù)估計(jì)方法[J].艦船電子對(duì)抗,2013,36(3):89-91.Xu W,Chen Y S.An estimation method for K-distribution clutter parameters[J].Shipboard Electronic Countermeasure,2013,36(3):89-91(in Chinese).
[7] 胡文琳,王永良,王首勇.基于zrlog(z)期望的K分布參數(shù)估計(jì)[J].電子與信息學(xué)報(bào),2008,30(1):203-205.Hu W L,Wang Y L,Wang S Y.Estimation of the parameters K-distribution based on zrlog(z)[J].Journal of Electronics& Information Technology,2008,30(1):203-205(in Chinese).
[8] 李大朋,姚迪.對(duì)Jahangir組合式矩估計(jì)器的改進(jìn)[J].北京航空航天大學(xué)學(xué)報(bào),2012,38(6):788-792.Li D P,Yao D.Improvement of Jahangir’s multiple moments estimator[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(6):788-792(in Chinese).
[9] 李大朋,姚迪.對(duì)K分布形狀參數(shù)M估計(jì)器的再改進(jìn)[J].電子與信息學(xué)報(bào),2011,33(7):1752-1755.Li D P,Yao D.A further enhanced M-estimator for the K-distribution shape parameter[J].Journal of Electronics & Information Technology,2011,33(7):1752-1755(in Chinese).
[10] Joughin I R.Maximum likelihood estimation of K-distribution parameters for SAR data[J].IEEE Trans on Geosciences and Remote Sensing,1993,31(5):989-999.
[11] Oliver C J.Optimum texture estimators for SAR clutter[J].Journal of Physics D:Applied Physics,1993,26(11):1824-1835.
[12] Blacknell D.Comparison of parameter for K-distribution[J].IEE Proceedings:Radar,Sonar and Navigation,1994,141(1):45-52.
[13] Jahangir M,Blacknell D,White R G.Accurate approximation to the optimum parameter estimate for K-distributed clutter[J].IEE Proceedings:Radar,Sonar and Navigation,1996,143(6):383-390.
[14] 郝程鵬,侯朝煥.一種K-分布雜波背景下的雙參數(shù)恒虛警檢測(cè)器[J].電子與信息學(xué)報(bào),2007,29(3):756-759.Hao C P,Hou C H.A two parameter CFAR detector in K-distribution clutter[J].Journal of Electronics & Information Technology,2007,29(3):756-759(in Chinese).
[15] 郝程鵬,侯朝煥,鄢錦.一種新的 K分布形狀參數(shù)估計(jì)器[J].電子與信息學(xué)報(bào),2005,27(9):1404-1407.Hao C P,Hou C H,Yan J.A new estimator for estimating the parameters of K-distribution[J].Journal of Electronics & Information Technology,2005,27(9):1404-1407(in Chinese).
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂(lè)作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
