具有干擾的多自主體系統的群集運動與速度同步
2015-12-19 09:15:54褚福芳楊洪勇
復雜系統與復雜性科學 2015年1期
關鍵詞:主體
褚福芳,楊洪勇
(魯東大學信息與電氣工程學院,山東 煙臺264025)
0 引言
群集運動問題一直受到物理、生物、工程等許多領域專家的廣泛關注,所謂群集運動問題,即分布式系統中各個自主體之間按照一定的規則進行信息交換,使得自主群體漸近地取得相同的速度向量,兩自主體之間的距離保持穩定并且沒有碰撞發生。
基于圖論和矩陣理論,許多控制學者在群集運動研究方面取得了顯著成果。Olfati-Saber[1-2]提出了3個控制算法,第1個控制算法體現了Reynolds[3]的3條規則,第2個算法具有避免與障礙物相撞的功能,第3個算法中假設每個自主體都具有領航者的信息,對每個自主體增加引導反饋來實現目標跟蹤的功能。蘇厚勝[4-5]基于Godsil C[6]、Horn R A[7]提出的代數圖論理論,研究了只有一部分自主體具有領航者信息的連通網絡的情況,推廣了原有的結論。俞輝和王永驥等人[8-11]研究了在固定/動態的網絡拓撲中具有領航者的多智能體群集編隊控制問題。當自主體模型參數存在不確定性或存在外界干擾時,群集運動問題變得更加復雜,更具有挑戰性,我們針對一階系統中存在的干擾,提出了采用干擾-觀測器控制的移動智能體系統的一致性的算法[12]。劉佳等[13]研究了具有時變時滯動態拓撲和模型不確定性的多智能體,提出了多智能體系統的魯棒H∞一致性算法。但是對于具有干擾的多自主體系統的群集運動研究,鮮有報道。
本文基于人工勢能函數梯度結合干擾觀測器控制方法,研究具有領航者的多自主體系統,通過引入干擾觀測器對干擾進行觀測,提出在干擾環境中取得群集運動和速度同步的分布式控制協議。
1 問題描述與預備知識
1.1 代數圖論
定義無向圖G= (V,E,A),其中V= {1,2,…,n} 是圖G的節點集合,用來表示n個自主體,E?V×V,(vi,vj)表示圖中邊的集合,A= [aij]是圖G的權重矩陣,其中 ?i∈V,aii=0,aij>0?(vi,vj)∈E,aij=0?(vi,vj)?E。結點vi的鄰接集合為Ni= {j∈V,aij>0} 。圖G的Laplacian矩陣定義為

1.2 問題描述
基于無向網絡拓撲圖G=(V,E,A),考慮n個自主體在2維歐式空間中運動,假設第i個自主體的動態方程描述如式(3):

其中,qi=(xi,yi)T是自主體i的位置向量,是自主體i的速度向量,ui=(uxi,uyi)T是自主體i的控制輸入向量,di為外界干擾,可以表示為如式(4)形式的外部動態子系統:

其中,wi為干擾內部狀態,外部動態子系統(A,C)可觀。
假設被控系統的狀態向量均可用,則只需對干擾子系統進行觀測,為了消除干擾di,引入的干擾觀測器可以表示為如式(6)的表達式:

其中,zi為引入的輔助變量的估計,Y為待求矩陣。
定義1 如果自主群體(漸近地)取得相同的速度向量,自主體兩兩之間的距離保持穩定并且沒有碰撞發生,就稱自主群體(漸近地)取得了群集運動。
控制目標就是設計控制輸入以使自主群體取得定義1意義下的群集運動與速度同步,為了解決這種問題,采用式(6)的分布式控制協議:

第1項ai用于自主體間的分離和聚合;第2項αi用于調整自主體i的速度,以使自主群體達到速度匹配;第3項βi為引導反饋項,用于實現與領航者的速度一致,分布式控制協議的具體表達式由方程(9)表示。假設領航者滿足運動方程(7):

qr=是領航者r的位置、速度向量,本文主要討論的領航者做勻速運動。
定義2 勢場函數Uij是一個關于自主體i和自主體j之間相對距離‖qj-qi‖可微、非負、無界的函數,且滿足:
1)當‖qj-qi‖ →0時,Uij(‖qj-qi‖)→ ∞;
2)Uij在某一合乎要求的距離處取得唯一的最小值。
取勢場函數:

假設在網絡拓撲G=(V,E,A)中,自主體之間的通信或相互作用是時不變的,自主體i的控制輸入ui取如式(9)的表達式:

其中,k,c1為大于零的常量為單位向量;hi=1,為自主體i能夠獲得領航者信息,hi=0,表示不能獲得領航者的信息;是對干擾di的估計。

圖1 勢場函數ψ(z)Fig.1 Potential functionψ(z)
2 主要結論
定理1 考慮存在領航者具有n個自主體的系統,由它們組成的網絡拓撲為G=(V,E,A),且G是無向連通圖,每個自主體的動態方程為方程(3)所描述,控制輸入由方程(9)表示,可以得到如下結論:
1)當系統中自主體沒有受到外界干擾時,所有自主體的速度最終能夠漸近收斂到領航者的速度,并達到群集運動。
2)當自主體受到外界干擾時,若存在正定矩陣矩陣P>0,適當維數的矩陣Q使得矩陣不等式(10)成立

證明:1)討論系統中所有的自主體都沒有受到外界干擾時的情況,選取能量函數(11):
把方程(12)代入到方程(14)可以得到

因為arctanx函數是類飽和函數,在原點附近可以做arctanx=x近似,帶入得

2)討論系統中自主體受到外界干擾時的情況,定義誤差變量e,則


同樣選取能量函數(18)

對式(18)求導可得
對arctanx函數做同樣的近似處理,可以得到


所以,由定理中的條件可以得到˙V<0,則在干擾環境中也能取得群集運動與速度同步。
3 仿真結果
考慮由4個相同二階運動模型的自主體組成的系統,其組成的網絡拓撲如圖2所示。勢能函數為:Uij(‖qi-,其中d=2,分布式控制協議的控制增益k=1,反饋系數c1=1。系統中各自主體、領航者的初始位置隨機地在[0 10;0 10]的正方形區域內產生,自主體地初始速度的大小隨機地在[0 1]范圍內產生,方向任意,領航者的初始速度為:prx=0.7,pry=0.5。外界干擾子系統滿足A=干擾的初值為:wi(0)= [0.25sin10.15cos1] 。根據定理中的充分條件,求取的未知矩陣為
3.1 自主體沒受到外界干擾時的仿真
假設4個自主體中,只有1號自主體能獲得領航者信息,其余自主體與1號自主體組成的拓撲結構如圖2所示,且是時不變的。4條曲線代表4個自主體的運動情況,點劃線代表領航者的運動情況,圖3、圖4刻畫的是領航者和自主體的速度隨時間的變化情況,從圖中可以看到,經過50s,4個自主體能夠取得速度與領航者同步。圖5刻畫的是4個自主體、領航者在兩坐標軸上的相對位置,經過足夠的時間后,自主體與領航者的運動軌跡取得平行,即它們的速度趨于同步,從而形成編隊。

圖2 4個自主體互連拓撲結構Fig.2 Interconnected topology of 4agents
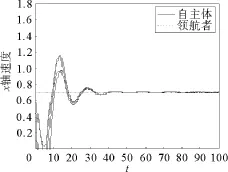
圖3 自主體沒有受到外界干擾時x軸的速度Fig.3 Agent′s xaxis velocities without disturbance

圖4 自主體沒有受到外界干擾時y軸的速度Fig.4 Agent′s yaxis velocities without disturbance
3.2 自主體受到外界干擾時的仿真
當自主體受到外界干擾時,自主體與領航者組成的拓撲結構與無干擾時的拓撲結構相同。圖6、圖7刻畫的是自主體受到外界干擾時,沒有引入干擾觀測器時自主體、領航者的速度曲線。圖8~10刻畫的是自主體受到干擾時,通過設計基于干擾觀測器的控制協議,自主體、領航者的運動情況。仿真結果表明,當自主體受到外界干擾時,自主體的速度在領航者速度上下震蕩,引入干擾觀測器后,自主體與領航者速度同步的調節時間變長,震蕩次數增加,自主體的運動軌跡更加曲折。但是,經過70s后,所有自主體都同步于領航者的速度;自主體相對位置曲線最終都平行于領航者的相對位置曲線。

圖5 自主體沒有受到外界干擾時兩坐標軸相對位置Fig.5 Agent′s relative position of two axes without disturbance
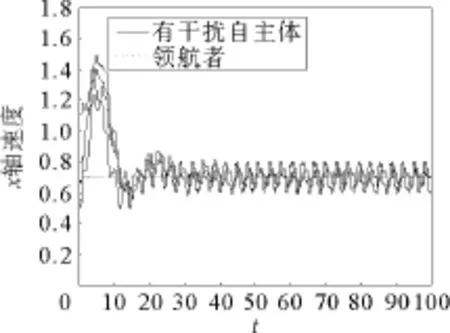
圖6 自主體受到外界干擾時x軸的速度Fig.6 Agent′s xaxis velocities with disturbance
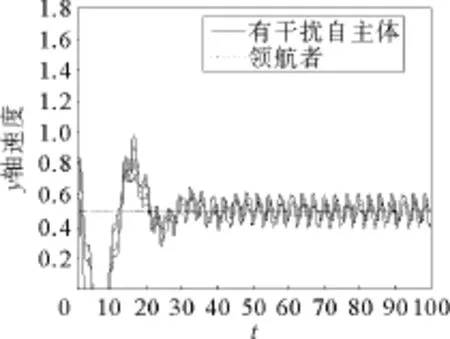
圖7 自主體受到外界干擾時y軸的速度Fig.7 Agent′s yaxis velocities with disturbance
3.3 自主體受到外界干擾且領航者做變速運動時的仿真
當自主體受到外界干擾且領航者做變速運動時,自主體與領航者組成的拓撲結構與前面的拓撲結構相同。自主體和領航者的位置、速度初值的確定與前面確定方式相同,圖11~13刻畫的是引入干擾觀測器后,設計基于干擾觀測器的分布式控制協議且領航者做變速運動時的情況(領航者的加速度為:arx=0.01,ary=0.015)。由仿真結果來看,當自主體受到外界干擾且領航者做勻加速運動時,在調節階段,自主體的運動軌跡與領航者的運動軌跡不同,經過足夠的時間后自主體同步于領航者的速度,自主體與領航者的相對位置曲線取得平行,即取得了群集編隊運動。
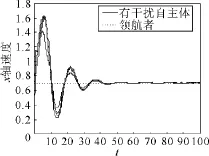
圖8 引入干擾觀測器后自主體x軸的速度Fig.8 Agent′s xaxis velocities when disturbance observer is imported
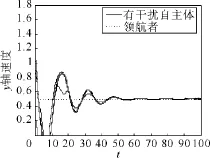
圖9 引入干擾觀測器后自主體y軸的速度Fig.9 Agent′s yaxis velocities when disturbance observer is imported
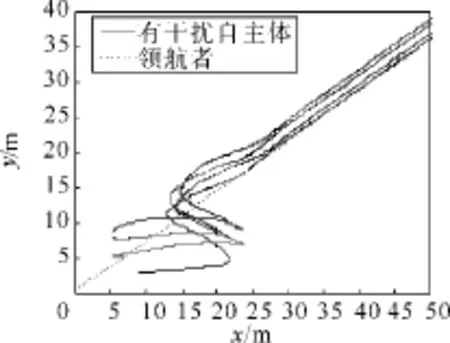
圖10 引入干擾觀測器后自主體兩坐標軸相對位置Fig.10 Agent′s relative position of two axes when disturbance observer is imported

圖11 引入干擾觀測器且領航者做加速運動x軸速度Fig.11 Agent′s xaxis velocities when observer is imported and leader accelerated

圖12 引入干擾觀測器且領航者做加速運動y軸速度Fig.12 Agent′s yaxis velocities when observer is imported and leader accelerated

圖13 引入干擾觀測器且領航者做加速運動兩坐標軸相對位置Fig.13 Agent′s relative position when disturbance observer is imported and leader accelerated
4 結論
本文研究了基于無向連通網絡的多自主體系統,通過引入干擾觀測器對干擾子系統進行觀測,提出了基于干擾觀測器控制的分布式控制協議,此協議保證了自主體能夠取得群集運動與速度同步,體現了控制協議對環境具有很強的適應性。本文的后續工作將對不同階多自主體系統的群集運動進行研究。
[1] Olfati-Saber R,Murray R M.Consensus problems in networks of agents with switching topology and time-delays[J].IEEE Transactions on Automatic Control,2004,49(9):1520-1533.
[2] Olfati-Saber R.Flocking for multi-agent dynamic systems:algorithms and theory[J].IEEE Transactions on Automatic Control,2006,51(3):401-420.
[3] Reynolds C W.Flocks,herds,and schools:a distributed behavioral model[J].Computer Graphics,1987,21:25-34.
[4]Su Housheng,Wang Xiaofan.Pinning control for stable flocking of mobile agent[C]∥The Regional Inter-University Postgraduate Electrical and Electronic Engineering Conference.Macau,China,2006.
[5] Su H S,Wang X F,Lin Z L.Flocking of multi-agents with a virtual leader[J].IEEE Transactions on Automatic Control,2009,52(8):1497-1475.
[6] Godsil C,Royle G.Algebraic Graph Theory,Graduate Texts in Mathematics[M].New York:Springer-Verlag,2001:265-295.
[7] Horn R A,Johnson C R.Matrix Analysis[M].Cambridge,UK:Cambridge University Press,2012:387-547.
[8] 俞輝,王永驥,程磊.基于有向網絡的智能群體群集運動控制 [J].控制理論與應用,2007,24(l):80-83.Yu Hui,Wang Yongji,Cheng Lei.Flocking motion control of flock in directed networks[J].Control Theory and Application,2007,24(1):80-83.
[9] 俞輝,王勇驥,程磊.穩定的有領航者的多移動agent群集運動控制 [J].華中科技大學學報:自然科學版,2005,33(8):56-58.Yu Hui,Wang Yongji,Cheng Lei.Control of stable flocking motion of multi-agent with a leader[J].Huazhong University of Science and Technology(Nature Science Edition),2005,33(8):56-58.
[10]Yu Hui and Wang Yongji.Control of stable flocking motion of multi-agent with a leader[J].Journal of Huazhong University of Science and Technology,2005,33(8):56-58.
[11]Yu H,Wang Y J.Stable flocking motion of mobile agents following a leader in fixed and switching networks[J].International Journal of Automation and Computing,2006,3(1):8-16.
[12]Yang H Y,Zhang ZH X,Zhang SH.Consensus of mobile multi-agent system with disturbance-observer-based control[J].Control Theory and Application,2010,27(12):1787-1792.
[13]劉佳,劉忠信,陳增強.基于時變時滯動態拓撲網絡的多智能體魯棒H∞一致性控制 [C]∥29屆中國控制會議.北京,2010:4512-4517.Liu Jia,Liu Zhongxin,Chen Zengqiang.Robust H∞consensus control for multi-agent system with dynamic topologies and time-varying delays[C]∥ Proceedings of the 29th Chinese Control Conference,Beijing,2010:4512-4517.
猜你喜歡
江蘇安全生產(2022年4期)2022-05-23 13:03:42
財會月刊·上半月(2022年5期)2022-05-17 11:12:21
南大法學(2021年3期)2021-08-13 09:22:32
阿來研究(2021年1期)2021-07-31 07:39:04
今日農業(2021年7期)2021-07-28 07:07:16
領導文萃(2020年15期)2020-08-19 12:50:53
中國自行車(2018年9期)2018-10-13 06:17:10
中醫文獻雜志(2016年6期)2017-01-17 00:24:10
自然與文化遺產研究(2016年2期)2016-05-17 05:53:59
金色年華(2016年13期)2016-02-28 01:43:27
