基于擴張狀態(tài)觀測器的導(dǎo)彈滑模制導(dǎo)律
2015-12-20 05:30:20張堯郭杰唐勝景馬悅悅商巍
北京航空航天大學(xué)學(xué)報 2015年2期
張堯,郭杰,唐勝景,馬悅悅,商巍
(北京理工大學(xué) 宇航學(xué)院,飛行器動力學(xué)與控制教育部重點實驗室,北京100081)
制導(dǎo)律設(shè)計是導(dǎo)彈實現(xiàn)精確控制和對目標實現(xiàn)準確打擊的基礎(chǔ).因此,要實現(xiàn)更高精度的制導(dǎo)律設(shè)計,就需要在原有的制導(dǎo)模型基礎(chǔ)上采用更為先進的控制算法進行制導(dǎo)律設(shè)計.
隨著控制思想的進步,相關(guān)研究提出了諸如最優(yōu)制導(dǎo)律、滑模變結(jié)構(gòu)制導(dǎo)律、改進比例導(dǎo)引等.Zhang等[1]基于線性二次調(diào)節(jié)理論,以脫靶量和攻擊落角為約束,設(shè)計了空地導(dǎo)彈的三維最優(yōu)制導(dǎo)律;Hexner等[2]在導(dǎo)彈機動加速度物理約束條件下,基于隨機優(yōu)化控制思想建立零化脫靶量的條件可能密度函數(shù),提出了一種全新的最優(yōu)制導(dǎo)律,但當導(dǎo)彈加速度物理約束足夠大時,該方法退化為傳統(tǒng)的最優(yōu)制導(dǎo)律;張友安等[3]考慮到落角約束,應(yīng)用Schwarz不等式得到了任意加權(quán)最優(yōu)制導(dǎo)律的一般表達式,但導(dǎo)彈的落角和加速度指令受初始條件影響較大;而Zhang等[4]基于非線性積分滑模控制設(shè)計了一種變結(jié)構(gòu)制導(dǎo)律,同時采用非線性擾動觀測器對制導(dǎo)律目標機動加速度進行觀測和控制量補償,降低了控制量的高頻振蕩,實現(xiàn)了視線角速率在有限時間內(nèi)收斂于零;朱凱等[5]基于滑模干擾觀測器和比例導(dǎo)引律設(shè)計了一種多約束條件下的魯棒末制導(dǎo)方法,該制導(dǎo)方法不需要測距信息和對剩余飛行時間的估算,但在制導(dǎo)指令生成過程中需要對導(dǎo)引系數(shù)不斷進行自適應(yīng)迭代運算,從而加大了指令計算時間和系統(tǒng)的復(fù)雜性;馬克茂等[6]和竇榮斌等[7]均是采用滑模控制思想設(shè)計了變結(jié)構(gòu)制導(dǎo)律,但設(shè)計過程中將系統(tǒng)中的不確定項視為未知有界的,使得所需控制量變大并且容易產(chǎn)生高頻振蕩現(xiàn)象;熊俊輝等[8]針對迎擊攔截高速目標的問題,應(yīng)用模糊變系數(shù)策略設(shè)計了一種全新的變結(jié)構(gòu)制導(dǎo)律,降低了制導(dǎo)初期的需用過載.此外,Moosapour等[9]通過考慮自動駕駛儀動態(tài)特性,基于魯棒設(shè)計思想提出了一種改進比例導(dǎo)引設(shè)計方法;王嘉鑫等[10]通過引入?yún)⒖寄繕嗽O(shè)計了一種新型的比例導(dǎo)引律,但該方法只適用于目標機動性較小的情況.
上述新型制導(dǎo)律雖然具備很強的優(yōu)越性,但其設(shè)計增加了系統(tǒng)自身的復(fù)雜度,同時對于導(dǎo)彈運動過程中的未知量(如目標機動加速度)無法進行實時的準確測量,工程應(yīng)用不強.在滑模變結(jié)構(gòu)制導(dǎo)律設(shè)計中通過狀態(tài)觀測器對目標機動加速度進行估計,但實際系統(tǒng)中由于系統(tǒng)自身和外界的不確定性,導(dǎo)致設(shè)計前假設(shè)的目標機動加速度上限無法準確獲得,獨立于模型的設(shè)計能力差,人為假設(shè)的上限值會使所需的控制量變大并且可能出現(xiàn)高頻顫振現(xiàn)象,打破原有的系統(tǒng)物理條件約束.
針對上述不足,本文以導(dǎo)彈攔截機動目標為背景,采用的擴張狀態(tài)觀測器(ESO,Extended State Observer)在獨立于被控對象數(shù)學(xué)模型的基礎(chǔ)上,通過將目標機動加速度擴張成一個新的狀態(tài)而對這一新的狀態(tài)量進行實時的估計和動態(tài)補償;同時,基于滑模變結(jié)構(gòu)理論提出了一種新型滑模制導(dǎo)律,從而實現(xiàn)對機動目標的精確打擊.
1 導(dǎo)彈運動模型
1.1 模型描述
為了方便研究,考慮縱向平面內(nèi)的攔截彈制導(dǎo)律設(shè)計問題.彈目相對運動如圖1所示.圖中,M和T分別表示導(dǎo)彈和目標的質(zhì)心位置.
圖1 彈目相對運動Fig.1 Missile-to-target relative motion
由彈目相對運動方程可知:

式中,r為彈目相對距離;q為彈目視線角;Vt和Vm分別表示目標速度和導(dǎo)彈速度.為簡化數(shù)學(xué)模型,假設(shè)目標和導(dǎo)彈的速度大小對時間的導(dǎo)數(shù)=0和=0.此外,令目標和導(dǎo)彈的法向加速度分別為At=Vt,Am=Vm,其中θt和θm分別為目標和導(dǎo)彈的航跡傾角,和分別為目標和導(dǎo)彈的航跡傾角對時間的導(dǎo)數(shù).
因此,式(1)兩邊對時間t求導(dǎo),可得
假設(shè)1 系統(tǒng)(2)中各個狀態(tài)變量r,q,Vr,Vλ和 θm均可直接得到[11].
假設(shè)2 在導(dǎo)彈對目標實施攔截打擊過程中,目標法向加速度At是未知有界的,則Atr和Atλ滿足如下關(guān)系[11]:
1.2 攔截策略

式中c0為設(shè)計參數(shù)且c0>0.令,則要實現(xiàn)攔截策略(4)需設(shè)計一個在有限時間內(nèi)可令e趨于零的反饋控制器.該攔截制導(dǎo)策略的有效性證明詳見文獻[11].
2 基于ESO的導(dǎo)彈滑模制導(dǎo)律設(shè)計
為了使導(dǎo)彈實現(xiàn)1.2節(jié)所述攔截策略,本文采用滑模控制理論來對導(dǎo)彈制導(dǎo)律進行設(shè)計.對于系統(tǒng)(2),選取滑模面為

根據(jù)滑模運動的可達性條件,令S對時間t求導(dǎo),采用如下趨近律:

式中,趨近律設(shè)計參數(shù) k>0,σ >0,0<γ <1.該趨近律能夠保證閉環(huán)系統(tǒng)(2)的狀態(tài)軌跡以有限時間收斂于滑模面S的鄰域內(nèi).
取閉環(huán)系統(tǒng)(2)的控制量u=Am,式(5)對時間求導(dǎo),并聯(lián)立式(2)和式(6),則
在實際工程應(yīng)用中,系統(tǒng)無法快速準確獲得Atλ的大小.故本文采用ESO對閉環(huán)系統(tǒng)(2)中的未知項Atλ進行實時的觀測和動態(tài)補償.
將系統(tǒng)(2)中的未知項擴張為一個新的狀態(tài),構(gòu)成如下所示的系統(tǒng):
式中,函數(shù)η(t)為目標加速度分量Atλ的導(dǎo)數(shù),則對系統(tǒng)(8)設(shè)計二階擴張狀態(tài)觀測器,其數(shù)學(xué)模型為
式中,e1為ESO對系統(tǒng)狀態(tài)量的觀測誤差;z1和z2為ESO對系統(tǒng)(8)的狀態(tài)觀測值;β01和 β02為ESO的觀測增益;函數(shù)fal(·)的表達式如下所示:
其中α1和δ為ESO的設(shè)計參數(shù).通過選擇合適的β01和β02可以使得ESO能夠很好地對狀態(tài)Vλ和被擴張狀態(tài)Atλ進行觀測和動態(tài)補償[13].
因此,聯(lián)立式(7)和式(9)可得基于ESO的導(dǎo)彈滑模制導(dǎo)律(ESMG)的控制量為
同時,本文在制導(dǎo)律仿真過程中考慮自動駕駛儀的動態(tài)特性,將自動駕駛儀視為二階振蕩環(huán)節(jié),則通過自動駕駛儀輸入給彈體環(huán)節(jié)的控制指令A(yù)mc滿足下式:

針對本文所設(shè)計的滑模制導(dǎo)律,存在合適的β01,β02,α1和 δ,使得觀測值 z1和 z2分別收斂于Vλ和Atλ的鄰域內(nèi),通過采用控制律(11),使閉環(huán)系統(tǒng)(2)中各個狀態(tài)的運動軌跡以有限時間收斂于滑模面S=0附近.
3 穩(wěn)定性證明
為了便于系統(tǒng)的穩(wěn)定性分析,首先給出如下引理.
引理1[14]假設(shè)V(x)是定義域為U?Rn且一階連續(xù)可導(dǎo)的正定函數(shù),V·(x)+λVα(x)是定義域為U?Rn的半負定函數(shù),其中α∈(0,1),λ∈R+.則存在定義域U0?Rn,使得定義在U0?Rn上的任意V(x)均能以有限時間收斂至零.同時,若Treach為V(x)收斂至零的時間,則

式中V(x0)為V(x)的初值.
文獻[15]給出了ESO的穩(wěn)定性證明.此處將不再論述.當 β02取值足夠大、β01取值足夠小,則ESO的觀測誤差趨于零,也就是說ESO的觀測量z1和z2分別以有限時間收斂于Vλ和Atλ的鄰域內(nèi).
大量數(shù)值仿真實驗表明,非線性函數(shù)fal中的參數(shù)選擇 α1=1/2n-1,δ=h,其中 n 為擴張狀態(tài)觀測器的階數(shù),h為積分步長.當α1和δ確定時,根據(jù)系統(tǒng)的時間尺度概念,參數(shù)β0i(i=1,2)基本與積分步長有關(guān),由工程經(jīng)驗可知:β01≈1/h,β02≈h2/3[15].
針對系統(tǒng)(8)構(gòu)造如下的Lyapunov函數(shù):

對式(14)按時間t求導(dǎo)可得

假設(shè)存在一個權(quán)數(shù)0<ε≤1,使得不等式(15)可以寫成


系統(tǒng)收斂性得證,且S滿足:

式中0<ε0<1.同時,函數(shù) V收斂至零的時間Treach滿足下式:
因此,當ESO穩(wěn)定時,通過調(diào)節(jié)控制律中k和σ的值可使閉環(huán)系統(tǒng)的軌跡收斂于滑模面S=0的鄰域內(nèi).
當ESO能夠準確估計系統(tǒng)中的不確定項時,參數(shù)k和σ越大,閉環(huán)系統(tǒng)中各個狀態(tài)量以有限時間的收斂性越好,系統(tǒng)所取的滑模面S越能趨近于零;然而,在實際問題中,過大的k和σ會使得控制量過大而超過導(dǎo)彈系統(tǒng)自身物理條件的限制,因此在系統(tǒng)參數(shù)整定時需要權(quán)衡考慮設(shè)計方法和實際物理條件對參數(shù)的影響.
4 仿真結(jié)果分析
選取導(dǎo)彈的初始位置為 xm(0)=0 m,ym(0)=0 m,目標的初始位置為xt(0)=20 km,yt(0)=20 km;c0=0.1;導(dǎo)彈導(dǎo)引頭對視線角速率測量需經(jīng)過時間常數(shù)為30 ms的一階慣性環(huán)節(jié);導(dǎo)彈的最大機動過載為20;導(dǎo)彈在攔截過程中速度滿足下述關(guān)系:
此外,導(dǎo)彈自動駕駛儀的二階動態(tài)特性相關(guān)參數(shù)為 ω =10,ξ=0.7.
在所設(shè)計的ESMG中,開關(guān)函數(shù)sgn(·)的滯后性會使控制量Am在實際仿真過程中產(chǎn)生高頻抖振現(xiàn)象,進而影響了系統(tǒng)本身的穩(wěn)定性,使導(dǎo)彈命中精度降低.在制導(dǎo)律設(shè)計時,為削弱控制量的抖振現(xiàn)象,采用連續(xù)函數(shù)sat(·)代替式(11)中的開關(guān)函數(shù).

式中 δ0為消顫因子,δ0=0.01.
為驗證所設(shè)計制導(dǎo)律的優(yōu)越性,與基于有限時間收斂理論設(shè)計的導(dǎo)引律(FTCG)[12]進行對比,其數(shù)學(xué)模型為

式中,N>2;β>0;0<n≤1;ψ為目標機動加速度的上界,ψ =100.
針對上述制導(dǎo)律設(shè)計方法,對下面算例中的3種情況進行對比仿真.仿真中,ESMG的模型參數(shù)統(tǒng)一取為:γ =0.5,k=1.25,σ =1.2,β01=50,β02=100,α1=0.2,δ=0.15.
算例1 目標作法向加速度為At=10g sin t(單位:m/s2)的高速機動.
1)迎擊攔截速度為480 m/s的目標.
針對這種情況,取導(dǎo)彈的初始航跡角分別為θ =90°,45°,0°,F(xiàn)TCG 中 N=3.3,β =10,n=0.5,導(dǎo)彈與目標的運動曲線如圖2(a)所示.不同初始航跡角下,ESMG得到的脫靶量分別為 0.16,0.96,0.82 m,而 FTCG 得到的脫靶量分別為0.53,1.38,1.48 m.
2)尾追攔截速度為480 m/s的目標.
針對這種情況,取導(dǎo)彈的初始航跡角分別為θ =90°,45°,0°,F(xiàn)TCG 中 N=10,β =10,n=0.5,導(dǎo)彈與目標的運動曲線如圖2(b)所示.不同初始航跡角下,ESMG得到的脫靶量分別為 0.70,0.16,0.03 m,而 FTCG 得到的脫靶量分別為8.02,5.31,4.06 m.
3)前向攔截速度為1100 m/s的目標.
針對這種情況,取導(dǎo)彈的初始航跡角分別為θ =90°,45°,0°,F(xiàn)TCG 中 N=10,β =10,n=0.5,導(dǎo)彈與目標的運動曲線如圖2(c)所示.不同初始航跡角下,ESMG得到的脫靶量分別為1.26,1.31 m,而 FTCG 得到的脫靶量分別為10.05,11.37 m.
算例2 為進一步驗證ESMG在目標的法向加速度非周期變化時的有效性,考慮Case 1中的3種攔截方式對非周期高速機動目標進行攔截.目標法向加速度如圖3所示.
1)迎擊攔截速度為480 m/s的目標.
取導(dǎo)彈的初始航跡角與制導(dǎo)律中相關(guān)參數(shù)同算例1,導(dǎo)彈與目標的運動曲線如圖4(a)所示.不同初始航跡角下,ESMG得到的脫靶量分別為0.47,0.76,0.68 m,而 FTCG 得到的脫靶量分別為 8.16,8.15,8.17 m.
圖2 算例1中彈目相對運動曲線Fig.2 Curves of relative motion between missile and target in Case 1
圖3 目標法向加速度Fig.3 Normal acceleration of target
2)尾追攔截速度為480 m/s的目標.
取導(dǎo)彈的初始航跡角與制導(dǎo)律中相關(guān)參數(shù)同算例1,導(dǎo)彈與目標的運動曲線如圖4(b)所示.不同初始航跡角下,ESMG得到的脫靶量分別為1.47,1.14,1.49 m,而 FTCG 得到的脫靶量分別為 14.23,14.31,14.17 m.
3)前向攔截速度為1100 m/s的目標.
取導(dǎo)彈的初始航跡角與制導(dǎo)律中相關(guān)參數(shù)同算例1,導(dǎo)彈與目標的運動曲線如圖4(c)所示.不同初始航跡角下,ESMG得到的脫靶量分別為0.41,0.52 m,而 FTCG 得到的脫靶量分別為9.72,10.17 m.

圖4 算例2中彈目相對運動曲線Fig.4 Curves of relative motion between missile and target in Case 2
由上述對比仿真結(jié)果可以看出,ESMG使導(dǎo)彈在攔截時間和脫靶量方面均要小于FTCG.同時,針對不同的初始航跡角和攔截方法,ESMG表現(xiàn)出在導(dǎo)彈運動方面更強的魯棒性,導(dǎo)彈運動軌跡和脫靶量受攔截初始條件的不同影響更小.ESMG可以使導(dǎo)彈在不同攔截策略下以更大的精度對高速機動目標實施攔截打擊.
由于篇幅所限,圖5僅給出了初始航跡角θ=90°時導(dǎo)彈以上述3種攔截方式攔截目標的法向過載變化曲線,雖然在導(dǎo)彈運動初期ESMG對導(dǎo)彈的需用過載要求比較大,但在導(dǎo)彈真正實施對機動目標的攔截打擊末制導(dǎo)段時,ESMG所需的最大過載小于FTCG.因此,ESMG降低了導(dǎo)彈攔截末段的需用過載,提高了導(dǎo)彈武器的可靠性,在導(dǎo)彈可用過載一定的情況下,能夠使導(dǎo)彈有效地攻擊機動性更高的目標.
圖6給出了初始航跡角為θ=90°時導(dǎo)彈迎擊攔截機動目標時導(dǎo)彈控制輸入量變化曲線,由于仿真中考慮自動駕駛儀的二階動態(tài)特性,控制量Am的真實響應(yīng)具有一定的振蕩和時滯特性,間接驗證了所設(shè)計制導(dǎo)律的實用性.
如圖7所示,采用所設(shè)計的狀態(tài)反饋控制律能夠保證滑模面在有限時間內(nèi)趨近于零,從而實現(xiàn)對導(dǎo)彈所設(shè)計的攔截策略(2).
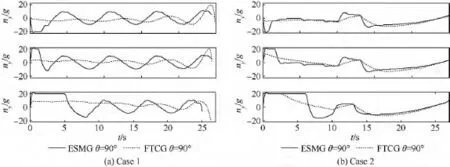
圖5 不同攔截方式(θ=90°)下導(dǎo)彈法向過載變化曲線Fig.5 Curves of missile normal overload in different intercepting ways(θ=90°)
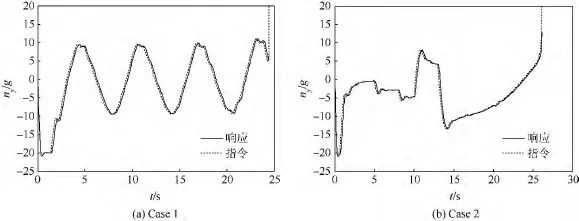
圖6 控制輸入量變化曲線Fig.6 Variation curves of control input
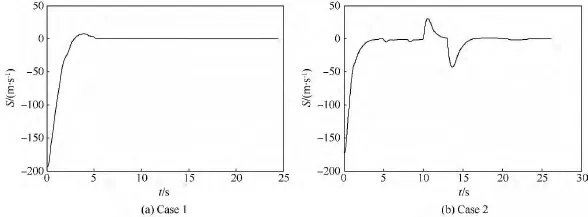
圖7 滑模面變化曲線Fig.7 Variation curves of sliding mode surface
圖8為ESO對未知目標加速度的觀測曲線.通過ESO對目標加速度的實時觀測和補償,實現(xiàn)了降低導(dǎo)彈攔截末端需用過載的目的.
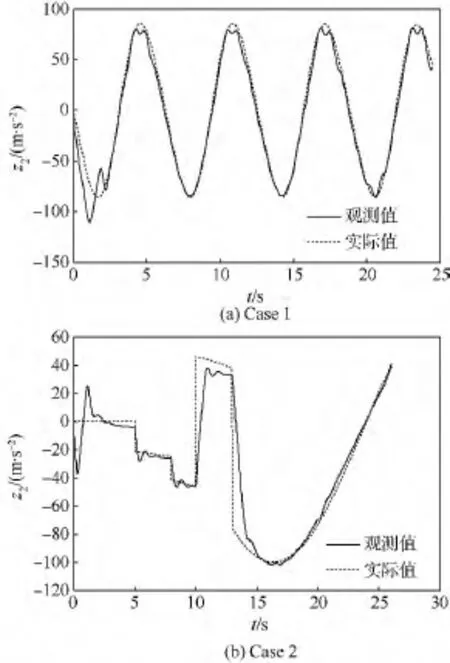
圖8 ESO對未知項加速度的觀測曲線Fig.8 Curves of estimated value of ESO to acceleration of unknown term
5 結(jié)論
本文在傳統(tǒng)變結(jié)構(gòu)制導(dǎo)律的基礎(chǔ)上提出了一種新的滑模制導(dǎo)律,經(jīng)仿真驗證表明:
1)本文所設(shè)計制導(dǎo)律中的擴張狀態(tài)觀測器能夠?qū)崟r地對目標機動加速度進行跟蹤觀測和反饋補償,達到了減小導(dǎo)彈打擊過程中需用過載的目的.
2)針對導(dǎo)彈采用不同的攔截策略打擊各種快速高機動目標的問題,本文所設(shè)計的制導(dǎo)律能夠保證導(dǎo)彈以更短的時間、更小的末端需用過載實現(xiàn)對目標的精確打擊.
References)
[1] Zhang Q Z,Wang Z B,Tao F.Optimal guidance law design for impact with terminal angle of attack constraint[J].Optik,2014,125(1):243-251.
[2] Hexner G,Shima T.Stochastic optimal control guidance law with bounded acceleration[J].IEEE Transaction on Aerospace and Electronic Systems,2007,43(1):71-78.
[3] 張友安,黃詰,孫陽平.帶有落角約束的一般加權(quán)最優(yōu)制導(dǎo)律[J].航空學(xué)報,2014,35(3):848-856.Zhang Y A,Huang J,Sun Y P.Generalized weighted optimal guidance laws with impact angle constraint[J].Acta Aeronautica et Astronautica Sinica,2014,35(3):848-856(in Chinese).
[4] Zhang Z X,Li S H,Luo S.Terminal guidance laws of missile based on ISMC and NDOB with impact angle constraint[J].Aerospace Science and Technology,2013,31(1):30-41.
[5] 朱凱,齊乃明.基于滑模干擾觀測器的垂直攻擊末制導(dǎo)律研究[J].兵工學(xué)報,2011,32(12):1462-1467.Zhu K,Qi N M.Research on vertical impact terminal guidance law based on sliding mode disturbance observer[J].Acta Armamentrii,2011,32(12):1462-1467(in Chinese).
[6] 馬克茂,馬杰.機動目標攔截的變結(jié)構(gòu)制導(dǎo)律設(shè)計與實現(xiàn)[J].宇航學(xué)報,2010,31(6):1589-1595.Ma K M,Ma J.Design and implementation of variable structure guidance law for maneuvering target interception[J].Journal of Astronautics,2010,31(6):1589-1595(in Chinese).
[7] 竇榮斌,張科.基于二階滑模的再入飛行器末制導(dǎo)律研究[J].宇航學(xué)報,2011,32(10):2109-2114.Dou R B,Zhang K.Research on terminal guidance law for re-entry vehicle based on second-order sliding mode control[J].Journal of Astronautics,2011,32(10):2109-2114(in Chinese).
[8] 熊俊輝,唐勝景,郭杰,等.基于模糊變系數(shù)策略的迎擊攔截變結(jié)構(gòu)制導(dǎo)律設(shè)計[J].兵工學(xué)報,2014,35(1):134-139.Xiong J H,Tang S J,Guo J,et al.Design of variable structure guidance law for head-on interception based on variable coefficient strategy[J].Acta Armamentarii,2014,35(1):134-139(in Chinese).
[9] Moosapour S S,Alizadeh G,Khanmohammadi S,et al.A novel robust proportional navigation guidance law design for missile considering autopilot dynamic[J].Transactions of the Institute of Measurement and Control,2013,35(3):703-710.
[10] 王嘉鑫,林德福,宋韜.引入?yún)⒖寄繕说谋壤龑?dǎo)引制導(dǎo)律研究[J].航天控制,2013,31(6):31-35.Wang J X,Lin D F,Song T.The proportional navigation guidance law with reference object[J].Aerospace Control,2013,31(6):31-35(in Chinese).
[11] Shtessel Y,Shkolnikov L,Levant A.Guidance and control of missile interceptor using second-order sliding modes[J].IEEE Transaction on Aerospaceand ElectronicSystems,2009,45(1):110-124.
[12] Zhou D,Sun S.Guidance laws with finite time convergence[J].Journal of Guidance,Control,and Dynamics,2009,32(6):1838-1846.
[13] 馬悅悅,唐勝景,郭杰,等.基于自抗擾和模糊邏輯的大攻角控制系統(tǒng)設(shè)計[J].系統(tǒng)工程與電子技術(shù),2013,35(8):1711-1716.Ma Y Y,Tang S J,Guo J,et al.High angle of attack control system design based on ADRC and fuzzy[J].Systems Engineering and Electronics,2013,35(8):1711-1716(in Chinese).
[14] Bhat S P,Bernstein D S.Finite-time stability of continuous autonomous systems[J].SIAM Journal of Control and Optimization,2000,38(8):751-766.
[15] 韓京清.自抗擾控制技術(shù)——估計補償不確定因素的控制技術(shù)[M].北京:國防工業(yè)出版社,2008:221-237.Han J Q.Active disturbance rejection control technique:the technique for estimating and compensating the uncertainties[M].Beijing:National Defence Industry Press,2008:221-237.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
