光刻機工件臺直線電機的完全跟蹤控制
2015-12-21 01:05:31陳興林劉川耿長青徐加彥
中南大學學報(自然科學版) 2015年9期
關鍵詞:系統
陳興林,劉川,耿長青,徐加彥
?
光刻機工件臺直線電機的完全跟蹤控制
陳興林1,劉川1,耿長青2,徐加彥1
(1. 哈爾濱工業大學航天學院,黑龍江哈爾濱,150001;2. 青島市工程咨詢院,山東青島,266071)
提出一種將完全跟蹤控制(PTC)和擴張狀態觀測器(ESO)相結合的復合控制方法以提高宏動直線電機的跟蹤性能。利用多速率采樣系統的特性構建宏動系統狀態傳遞函數矩陣的精確逆矩陣,以避免傳統的近似逆模型和插值帶來的限制,從而實現完全跟蹤控制;利用擴張狀態觀測器觀測系統內部的動態變化,補償系統中的各種擾動,從而減小擾動可能帶來的穩態跟蹤誤差。研究結果表明:該方法保證了系統的動態跟蹤精度和良好的魯棒性,提高了系統的動態性能。
完全跟蹤控制;擴張狀態觀測器;精密伺服;光刻機;工件臺
光刻機的工件臺是高動態精密伺服運動平臺,它要求在高速運動的情況下,采用長行程直線電機宏動跟隨平面洛倫茲電機高精密微動的驅動方式,在較短行程內實現平臺納米級的精確定位與跟蹤。以阿斯麥(ASML)商用的最先進光刻機Twinscan XT 1950i機型為例,工作時最高速度大于0.5 m/s,加速度大于 15 m/s2,定位精度在幾nm左右,穩定時間小于20 ms。因此,選擇一種能夠抗擊干擾,準確控制平臺運動的控制算法顯得尤為重要。對于光刻機的控制,迭代算法取得了許多的成果,涉及到很多方面[1?3]。Heertjes等[1]將迭代學習控制應用在ASML光刻機工件臺洛倫茲電機的控制中,取得了比較好的效果;石陽春等[2]將迭代學習控制應用在光刻機的直線電機控制中;武志鵬等[3]將迭代學習控制應用在光刻機工件臺和掩膜臺的同步控制中。對于光刻機中的剛體結構,迭代學習控制在施加控制的最后時刻,控制對象能夠精確到達目標位置,取得比較好的效果,但是對于撓性結構,在控制的最后時刻,有時盡管對象已經到達預定位置卻會出現擺動,因此,對于撓性結構系統,迭代算法也不太適合。Fujimoto等[4]提出了完全跟蹤的控制策略(perfect tracking controller,PTC),該方法應用在飛行仿真轉臺控制[5]、精密伺服平臺控制[6]、硬盤驅動[7]控制等很多領域,近年來正成為國內外研究的熱點。Kazuaki等[8]考慮了NIKON光刻機在高動態運行時臺體垂直方向上的撓性特征,將完全跟蹤控制應用在光刻機的控制中,取得了比較理想的效果。Han等[9]在自抗擾控制(active disturbance rejection control,ADRC)中提出了擴張狀態觀測器(extended state observer,ESO),該狀態觀測器不依賴被控對象精確的數學模型,在未知不確定擾動作用下,對系統的擾動進行估計并給予補償,具有較強的魯棒性。近年來,該方法應用在姿態控制[10]、電力傳動[11?12]、電力電子[13?14]等許多領域,都獲得了很好的控制效果。本文在光刻機工件臺的“長行程直線電機宏動跟隨平面洛倫茲電機高精密微動”運動系統的基礎上,提出一種針對直線電機的完全跟蹤控制和擴張狀態觀測器相結合的復合控制策略。首先介紹完全跟蹤控制算法以及對其魯棒控制器進行設計,再對光刻機工件臺的向和向直線電機分別進行建模,最后通過實驗驗證該方法的有效性。
1 完全跟蹤控制
利用多速率采樣系統的特點,設計光刻機工件臺直線電機的完全跟蹤控制器,以提高系統的動態跟蹤性能。
1.1 多速率采樣系統與完全跟蹤控制
完全跟蹤是指離散控制系統在理想狀態下,被控對象的狀態與這一時刻的期望狀態完全相等,即系統跟蹤誤差為0。PTC以多速率采樣理論為基礎,對于單一采樣周期的離散控制系統,完全跟蹤在理論上不能實現[5]。多速率采樣系統完全跟蹤控制器的結構如圖1所示。

圖1 完全跟蹤控制器結構
系統中存在3個周期:指令輸入周期r、控制量輸入周期u、系統反饋采樣周期y,各采樣周期存在以下關系:
r>u=y(1)
圖2所示為多速率采樣周期。圖2中,M為采樣,M為保持器,它按照采樣周期u依次輸出其輸入向量[]中的每個元素R[]。

圖2 多速率采樣周期
式中:c,c和c分別為系統矩陣、輸入矩陣和輸出矩陣;()為系統狀態向量;()為系統輸出向量。
式中:為系統矩陣;為輸入矩陣;為輸出矩陣;為前饋矩陣;[]為系統輸出向量。
系統的理論值為:

對于傳遞函數為式(12)的系統,本文選擇有物理意義的狀態變量的能控型來實現前饋控制器的設計,狀態空間模型為式(3),連續系統按照式(14)變換得到的離散狀態空間模型,其狀態具有同樣的物理意義[5]。
;
1.2 魯棒控制器的設計
魯棒控制器R()采用PD控制器和擴張狀態觀測器(ESO)相結合的方式,控制器結構如圖3所示。從圖3可見:1的控制器選用比例控制器;2的控制器選用比例積分控制器。ESO與普通的觀測器不同,擴張狀態觀測器可用來分析模型未知擾動和未建模動態對控制對象的影響,并對觀測到的擾動進行補償。
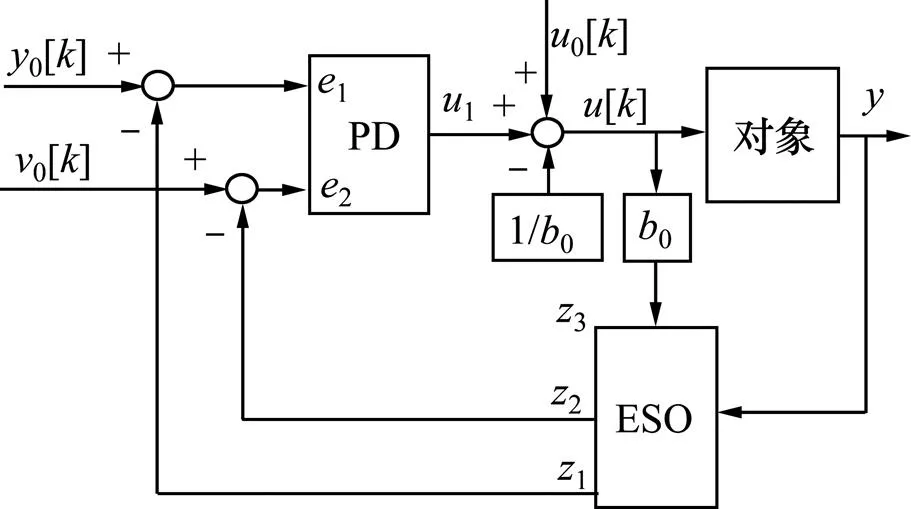
圖3 魯棒控制器框圖
對于階系統,用+1階ESO進行觀測,+1階離散線性擴張狀態觀測器為
其中:為中間變量;為可調參數;
為了驗證ESO的有效性,設計1個非線性的系統進行仿真,該系統表達式如式(17)所示,其中,為系統的外加未知擾動。

(a) 一階跟蹤曲線;(b) 二階跟蹤曲線;(c) 三階跟蹤曲線
2 系統模型
圖5所示為工件臺的總體結構,布局采用H型。在軸方向上,由雙直線電動機(定子1和2,動子3和4)驅動;在方向上,由另一直線電動機定子5通過連接機構6和7與動子3和4相連,動子8通過抓卡機構9與微動臺10相連,從而提供軸方向(掃描)運動的驅動力。整個臺體支撐采用氣浮結構,這一結構使得隨動臺動子沿和軸方向具有長行程運動的自由度。
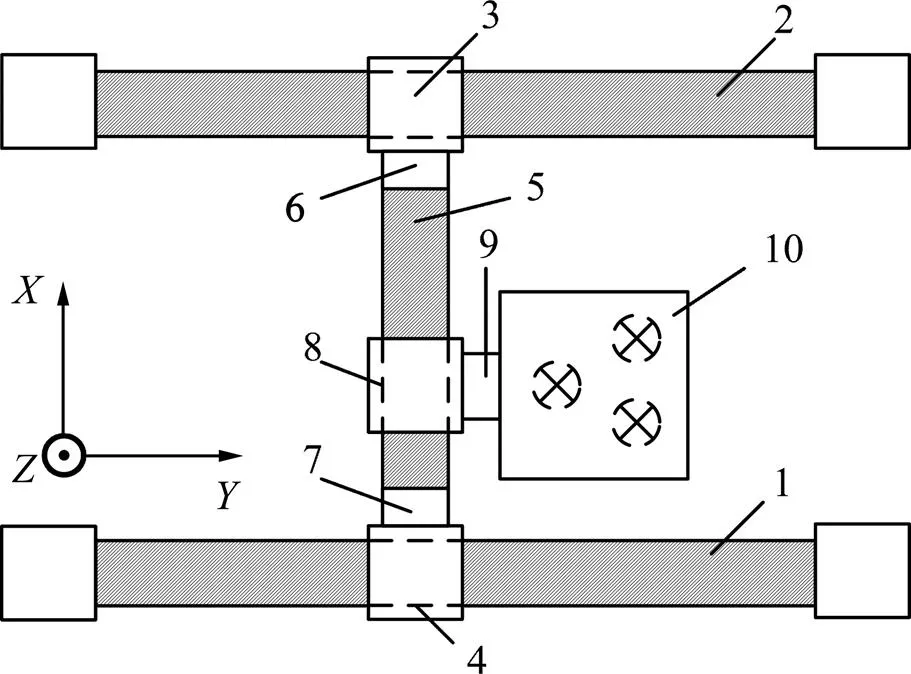
圖5 工件臺總體結構
2.1方向直線電機
通過上面的分析,可建立方向上直線電機模型的傳遞函數建立:
其中:2=;1=;0=1。
2.2方向直線電機
方向直線電機運動時,通過抓卡機構連同微動臺一起運動,抓卡機構材料采用60Si2Mn,抓卡機構長50 mm,所抓臺體質量為60 kg,通過用ANSYS分析發現,當臺體在以10 m/s2加減速時,臺體和抓卡機構會發生形變,分析結果如圖6所示。經過前面的分析,將平臺模型進行等效,推導出X方向直線電機的平臺模型,如圖7所示。

圖7 X方向平臺模型
其中:
3 實驗
實驗臺為自制的直線電機氣浮平臺及驅動裝置,上位機負責控制指令的發送;下位機采用德國ELMA 21槽VME64X機箱,內嵌VxWorks操作系統及其板級驅動包BSP,版本為6.4;運動控制卡為自制版卡,采用TI公司的TMS320C6416型DSP芯片,主頻1GHz,主要負責實時控制;運動位置由Renishaw公司的激光干涉儀測得;向和向平直線電機實驗平臺參數如表1所示;實驗時,直線電機的運動軌跡采用四階S曲線,軌跡參數如表2所示。
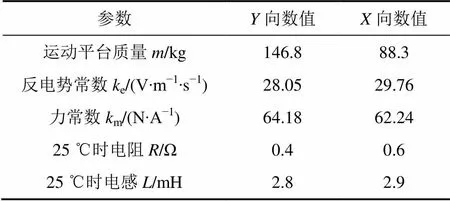
表1 直線電機實驗平臺參數

表2 4階S曲線參數
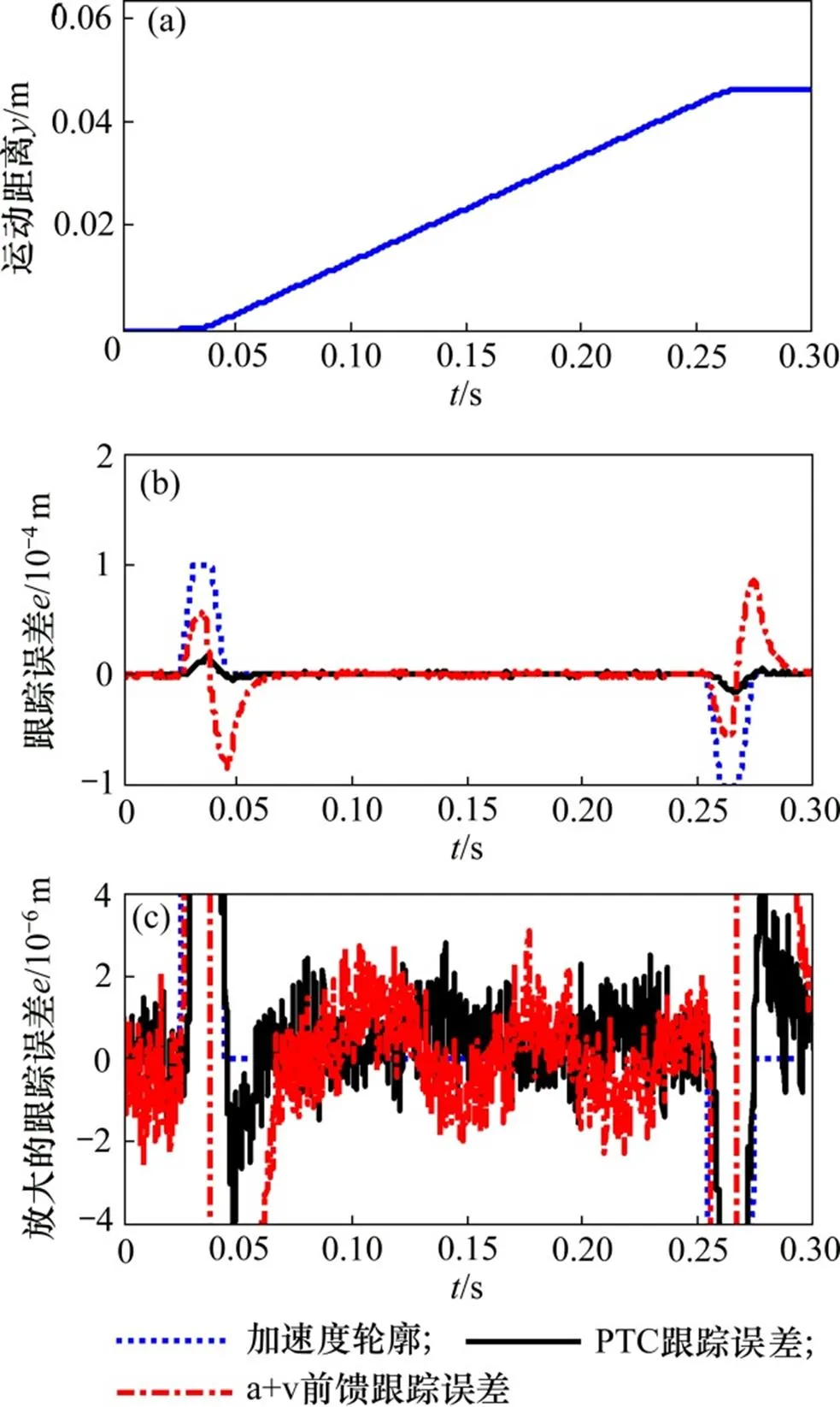
速度和加速度前饋控制的控制器,采用和PTC一樣的魯棒控制器R()。圖8所示為向跟蹤誤差曲線,圖8(a)所示為直線電機的運動軌跡。從圖8可知:采用速度和加速度前饋控制,直線電機在加減速時,臺體最大誤差為38 μm,進入勻速運動段后,最大誤差為2.5 μm,穩定時的時間在0.06 s;采用PTC算法,直線電機在加減速時,最大誤差為18 μm,進入勻速運動段后,最大誤差為2 μm,穩定時間為0.05 s。
圖9所示為向跟蹤誤差曲線,其中,圖9(a)所示為直線電機的運動軌跡。從圖9可知:采用速度和加速度前饋控制,直線電機在加減速時,臺體最大誤差為0.8 mm,進入勻速運動段后,最大誤差為3 μm,穩定時的時間在0.07 s;在勻速運動段,跟蹤誤差還受到低頻的干擾力影響而出現周期性波動,這是臺體在高速運動時,受臺體的擺動引起的;采用PTC算法,在加減速時,最大誤差為0.15 mm,進入勻速運動段后,最大誤差為2.5 μm,穩定時的時間在0.055 s。
在引入ESO后,系統中的未建模動態和未知擾動得到有效抑制,并對擾動進行估計和補償,使得2種控制方法的跟蹤誤差都比較小。采用PTC算法的精度要比采用速度和加速度前饋控制精度要高的原因,是PTC的前饋控制器M()構建了宏動系統狀態傳遞函數矩陣的精確逆矩陣,這比采用速度和加速度前饋性能會更好。通過將PTC算法與速度和加速度前饋控制的穩定時的時間進行對比發現:因為PTC的前饋控制器M()構建了宏動系統狀態傳遞函數矩陣的精確逆矩陣,直線電機在高動態運動的情況下,PTC的動態性能比速度和加速度前饋控制更好,系統穩定的時間也更短。
從圖8和圖9可見:臺體在加減速運動時都存在較大誤差峰值,且峰值幅度隨速度的增大而增大,原因主要有以下4點:
1) 電機加減速時,控制指令加減速變化較大,引起繞組電流變化,導致磁阻推力相應變化,從而造成較大位置誤差。
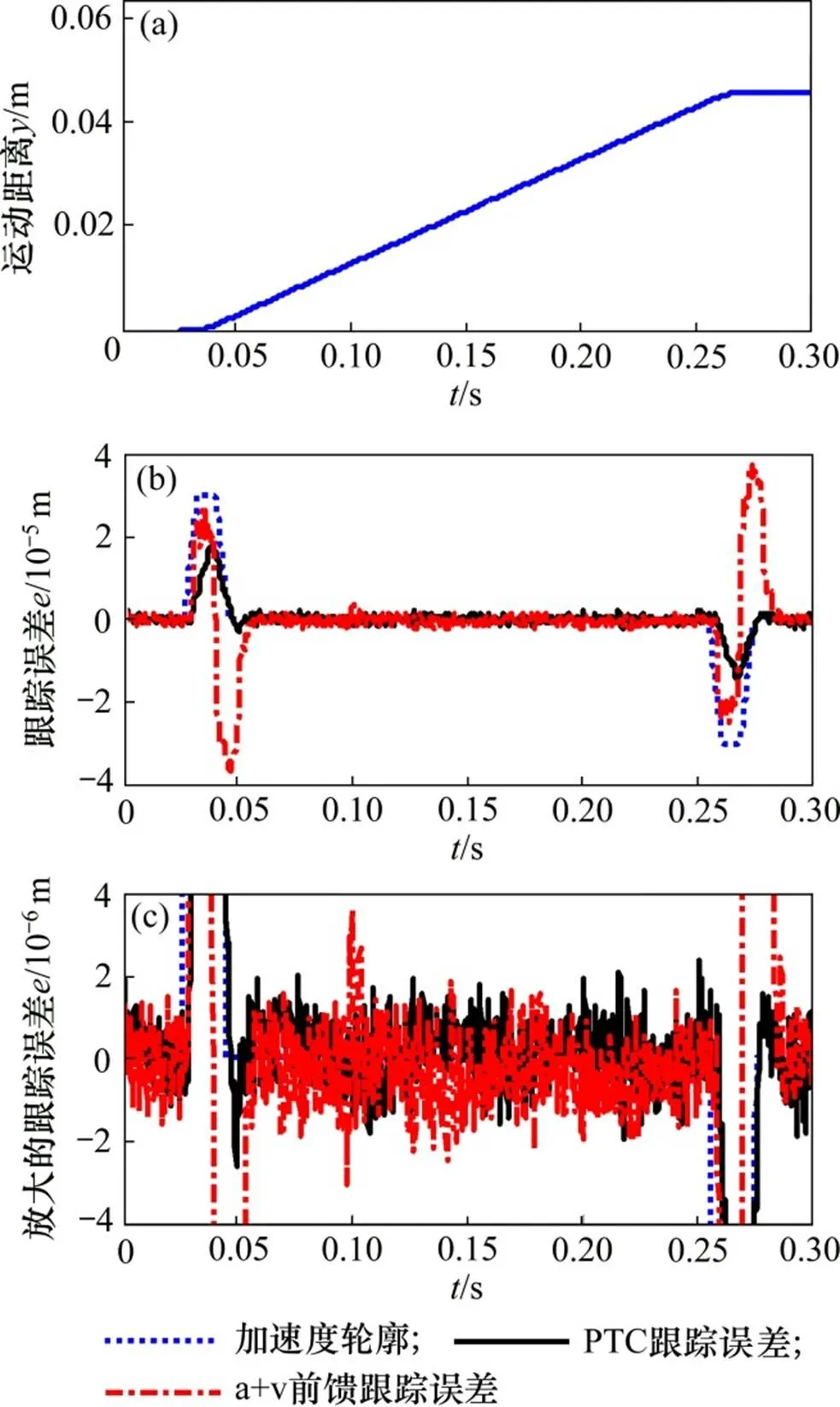
(a) 四階S曲線;(b) 跟蹤誤差曲線;(c) 放大的跟蹤誤差曲線
(a) 四階S曲線;(b) 跟蹤誤差曲線;(c) 放大的跟蹤誤差曲線
2) 直線電機加減速時,系統沖擊較大,電機定子存在較大慣性時滯。臺體減速時的誤差要小于臺體加速時的誤差,這是因為臺體從高速開始逐步減速時,具有較大的慣性,其運動慣性極大地減弱了磁阻推力的干擾影響,這是實驗結果中臺體在減速時位置誤差相對較小的主要原因。
3) 臺體的運動軌跡為4階S曲線,系統即有4階輸入指令,在前饋沒有完全物理實現的情況下,低階系統不能夠完全跟蹤4階高階輸入指令,系統必然存在靜差,從而在加減速時產生相比勻速時更大的位置偏差。
4) 前饋補償的式子一般具有比較復雜的形式,故全補償條件的物理實現有困難。在工程實際中,大多采用滿足跟蹤精度要求的部分補償條件,或者在對系統性能起主要影響的頻段內實現近似全補償,以使前饋補償的形式簡單并易于物理實現,因此,在加減速和勻速時,都存在誤差。
通過對比2種控制策略的位置跟蹤誤差曲線,發現采用PTC和ESO相結合的控制策略,系統的跟蹤誤差更小,系統的動態性能得到提高,驗證了該方法的有效性。
4 結論
1) 針對高動態精密定位的光刻機工件臺系統,通過ANSYS仿真分析,建立了工件臺直線電機宏動的動態模型。
2) ESO作為狀態觀測器,能夠有效抑制和補償系統中的未建模動態和未知擾動。
3) 采用PTC和ESO相結合的復合控制方式,可以在保證系統穩定性及抗干擾能力的同時,提高系統的動態性能,縮短系統穩定時間,此控制算法也可以推廣到其他的控制系統。實驗表明,該方法滿足光刻機工件臺對宏動系統高速、高精度跟蹤控制的要求。
[1] Heertjes M F, van de Molengraft R M J G. Set-point variation in learning schemes with applications to wafer scanners[J]. Control Engineering Practice, 2009, 17(3): 345?356.
[2] 石陽春, 周云飛, 李鴻, 等.長行程直線電機的迭代學習控制[J]. 中國電機工程學報, 2007, 27(24): 92?96. SHI Yangchun, ZHOU Yunfei, LI Hong, et al. Research on iterative learning control to long stroke linear motor[J]. Proceedings of the Chinese Society for Electrical Engineering, 2007, 27(24): 92?96.
[3] 武志鵬, 陳興林, 王巖. 基于迭代學習的掩模臺與工件臺同步控制[J]. 華中科技大學學報(自然科學版), 2013, 41(2): 86?90. WU Zhipeng, CHEN Xinglin, WANG Yan. Synchronizing control of reticle and wafer stages using iterative learning control[J]. Journal of Huazhong University of Science & Technology (Natural Science Edition), 2013, 41(2): 86?90.
[4] Fujimoto H, Hori Y, Kawamura A. Perfect tracking control based on multirate feedforward control with generalized sampling periods[J]. IEEE Transactions on Industrial Electronics, 2001, 48(3): 636?644.
[5] 吳云潔, 田大鵬, 劉佑民. 飛行仿真臺的完全跟蹤控制[J]. 控制理論與應用, 2011, 28(3): 414?426. WU Yunjie, TIAN Dapeng, LIU Youmin. Perfect tracking control for flight simulator[J]. Control Theory & Applications, 2011, 28(3): 414?426.
[6] 田大鵬, 吳云潔, 劉曉東. 高精度電機伺服系統控制綜合方法[J]. 電機與控制學報, 2010, 14(7): 66?74. TIAN Dapeng, WU Yunjie, LIU Xiaodong. Synthesis methods of high precision motor servo system control[J]. Electric Machines and Control, 2010, 14(7): 66?74.
[7] Fujimoto H, Fukushima K, Nakagawa S. Vibration suppression short-span seeking of HDD with multirate feedforward control[C]// Proceedings of the 2006 American Control Conference. New York: IEEE, 2006: 582?587.
[8] Kazuaki S, Atsushi H, Koichi S, et al. A study on high-speed and high-precision tracking control of large scale stage using perfect tracking control method based on multirate feedforward control[J]. IEEE Transaction on Industrial Electronics, 2010, 57(4): 1393?1400.
[9] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transaction on Industrial Electronics, 2009, 56(3): 900?906.
[10] LI Shunli, YANG Xu, YANG Di. Active disturbance rejection control for high pointing accuracy and rotation speed[J]. Automatica, 2009, 45(6): 1854?1860.
[11] SU Ying, DUAN Boyang, ZHENG Changhua, et al. Disturbance-rejection high-precision motion control of a Stewart platform[J]. IEEE Transactions on Control Systems and Technology, 2004, 12(3): 364?374.
[12] Butler H, Hoon C. Fractional-order filters for active damping in a lithographic tool[J]. Control Engineering Practice, 2013, 21(4): 413?419.
[13] SUN Bosheng, GAO Zhiqiang. A DSP-based active disturbance rejection control design for a 1-kW H-bridge DC–DC power converter[J]. IEEE Transactions on Industrial Electronics, 2005, 52(5): 1271?1277.
[14] Heertjes M F, Verstappen R. Self-tuning in integral sliding mode control with a Levenberg–Marquardt algorithm [J]. Mechatronics, 2014, 24(4): 385?393.
(編輯 羅金花)
Perfect tracking control for linear motor in wafer stage of lithography
CHEN Xinglin1, LIU Chuan1, GENG Changqing2, XU Jiayan1
(1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China;2. Qingdao Engineering Consulting Institute, Qingdao 266071, China)
A combined control method constituted by the perfect tracking control (PTC) and the extended state observer (ESO) for the linear motor was presented. In order to prevent the performance limitations brought about by the traditional approximate inverse transfer matrix model and the interpolation algorithm, the characteristics of a multirate sampling system were used to build an exact inverse transfer function matrix model of the flight simulator for realizing the perfect tracking. As ESO reduced the influences of the uncertainties, such as external load disturbances, unmodeled dynamics and system parameter perturbation, the static error was effectively removed. The results show that the proposed control method not only ensures the tracking accuracy and excellent robustness, but also improves the dynamic performance of the system.
perfect tracking control; extended state observer; ultra-precision servo system; lithography; wafer stage
10.11817/j.issn.1672-7207.2015.09.011
TP273+.3
A
1672?7207(2015)09?3238?07
2014?12?18;
2015?02?20
國家科技重大專項(2009ZX02207) (Project(2009ZX02207) supported by the National Science and Technology Major Project of China)
劉川,博士研究生,從事光刻機雙工件臺控制系統設計研究;E-mail: liuchun1226@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
