機動飛行器多終端約束反演滑模末端導引方法
2015-12-28 08:38:24洪功名陳萬春
飛行力學 2015年3期
關鍵詞:設計
洪功名,陳萬春
(北京航空航天大學 宇航學院,北京100191)
0 引言
機動飛行器在攻擊目標時,不但需要考慮減小脫靶量,而且某些特殊的戰斗部期望以一定的角度命中目標,從而獲得更好的毀傷效果。如某些再入機動彈頭在其末制導段,需要飛行的速度方向基本與地面垂直,這樣可以使得末制導系統正常工作。另外,彈頭為獲得最大的侵徹深度,需要最終以一定碰撞角命中目標。因此,終端角度的控制已成為精確打擊武器的一項重要性能。
文獻[1]在1973年首先給出一種帶落角約束形式的末制導律。經過多年的發展,國內外對有關帶角度約束的制導律設計已經有許多比較成熟的研究,部分成果已經在實際中開始應用。在設計帶角度約束的制導律時,常用的設計思想是基于比例導引律并附加偏置項[2]、基于最優控制理論[3],或基于變結構控制。
變結構控制中的反演設計(Backstepping)[4]是將Lyapunov函數的選取與控制器的設計相結合的一種回歸設計方法。它通過從系統最低階次微分方程開始,逐層鎮定設計最終達到全局鎮定,從而給出整個系統的控制律。滑模變結構控制對參數不確定性和外界干擾具有較強的魯棒性,國內外近些年來將反演滑模設計方法運用到帶角度約束的制導律設計上也取得了一些進展。賈慶忠等[5]運用反演遞推設計方法,得到適用于僅有角度測量的航空侵徹炸彈的帶末端落角約束的制導律。文獻[6]運用反演設計方法,通過設計合適的Lyapunov函數,給出能滿足終端角度約束的巡航導彈和可重復使用飛行器RLV著陸段的末制導律,不同初始條件以及氣動條件下的仿真結果顯示,該制導律具有很好的制導精度以及一定的魯棒性。但是這些都沒有考慮終端法向過載約束,仿真結果顯示末端可能出現較大的法向加速度,在環境及相關參數不確定性情況下容易出現明顯的脫靶量。
許多文獻在求解帶角度約束末制導律時,依賴對運動方程的線性化,得出解析形式的制導律。當需要考慮的終端約束較多時,制導律的結果較為復雜。眾所周知,高階滑模的滑動變量及其一定階導數具有在有限時間內收斂的特點,本文利用反演滑模設計方法,不依賴運動方程的線性化,通過設計合適的滑動面,使滑動變量及其各階導數漸進收斂于零來逐階滿足各個終端約束,最終給出整個系統的制導方法。在推導末制導律時考慮了終端法向過載約束,仿真結果顯示飛行器在接近目標時法向加速度很小,這樣可以近似保證彈頭在彈體軸方向與速度方向近似重合的情況下命中目標,從而提高彈頭的作戰效能。
1 數學模型
1.1 機動飛行器末制導段數學模型
為了簡化問題,以固定目標和飛行器質心為基準,將飛行器運動分解為俯仰平面和轉彎平面[3]。研究飛行器在質心M、目標T和地心所確定的俯仰平面內運動。將飛行器和目標都看作質點,彈-目關系示意圖如圖1所示。

圖1 彈-目關系示意圖Fig.1 Geometry of vehicle-target positions
圖中:T為目標的位置;xB為彈體軸;H為高度;x為縱向射程;LOS為視線;λ為視線角;V為飛行器的速度;γ為彈道傾角,以速度方向繞水平方向逆時針轉動為正;α為迎角,以彈體軸方向繞速度方向逆時針轉動為正;θ為俯仰角,以彈體軸方向繞水平方向逆時針轉動為正;am為法向加速度。運動學方程為:

式中:D為阻力;m為質量;g為重力加速度;L為升力。
1.2 終端約束
為提高彈頭的作戰效能,一般要求機動飛行器能以一定落角或彈道傾角命中目標,即終端彈道傾角要求滿足約束γend=γF,γF為需求的終端彈道傾角。除此之外,終端法向過載較大,容易在環境及相關參數不確定性下出現較明顯的脫靶量。另一個需要考慮的終端約束是法向加速度,即am,end=0。彈頭一般為軸對稱,終端法向加速度為零,可以使得迎角較小,由于θ≈α+γ,這樣彈頭(即彈體軸)能夠近似與速度方向一致。
1.3 反演設計
對于一個高階系統,其n-1階導數已知,并有:

設計高階滑模變結構控制u,使得f(x)及其n-1階導數:

在有限時間內實現。可以運用如下反演設計方法[4],在此考慮最常用的二階系統,有:

令滑動面為:

可設候補Lyapunov函數為:

求導得:

為保證滑動面s1在有限的時間內趨近于零,必須選擇合適的使得負定。文獻[6]給出一種的選擇方法:

式中:n為大于1的正常系數;tr為趨近零的時刻。這樣選擇可以保證滑動面s1在tr時刻趨近零,在運用制導律時可將tr-t用剩余飛行時間Tgo代替。
由于系統相對階為2,再設滑動面

考慮候補Lyapunov函數

求導得:

在此,可令趨近律為:

式中:η,K為正數,其大小影響收斂速度。對s2求導得:
式中出現了控制項,聯立式(12)和式(13),可得控制u表達式為:

為削弱符號函數引起的顫振,最常用的方法是用飽和函數sat(s)[4]代替理想滑動模態中的符號函數sign(s)。
2 設計末制導律
末制導律的設計分為俯仰平面和轉彎平面,轉彎平面的最優制導律為比例導引律[3],不需要再設計,所以本文只設計俯仰平面內的制導律。
需要考慮的終端約束有彈道傾角和法向加速度約束,而飛行器最終需要命中目標,加上射程約束,共有3個約束。因此,末制導律的設計是一個三階滑模控制問題,關鍵是滑動面f(x)的選取。
第一個約束是射程,f→0可以保證飛行器命中目標。而位移的一階導數為速度,考慮到飛行器的縱向速度與彈道傾角直接相關,因此設計第二個約束為縱向速度,f'→0可以保證終端彈道傾角滿足約束要求;位移的二階導數為加速度,射程的二階導數即彈道傾角的一階導數為法向加速度,f″→0可以保證終端法向加速度滿足約束要求。另外,垂直方向上命中目標是由剩余飛行時間趨向于零來保證的。有了以上的分析,構造滑動面如下:

式中:T為目標位置;x為當前飛行器縱向位置;V為速度;γF為終端約束要求的最終彈道傾角。s→0可以使得最終脫靶量為零,滿足射程要求,從而命中目標。假設速度項不變(實際中變化較小),對式(15)求導可得:


式中:am為法向加速度。由于大落角再入時sinγ不為零,因此s¨→0可以保證最終的法向加速度為零,從而間接使得最終的迎角很小。在此可以將飛行控制系統用一階延遲環節表示,指令加速度與實際加速度之間有如下關系:

式中:Tα為飛行控制系統時間常數;acmd為指令加速度。繼續對式(18)求導可得:

式中出現了控制項指令加速度u(acmd),因此根據反演設計方法,可求得控制u(acmd)為:

其中:

根據上述制導律得出指令加速度u(acmd)后,即可求得相應的指令迎角αcmd。
3 制導方案
典型再入機動飛行器,如美國的潘興-2導彈[7]的機動彈頭,當彈頭到達目標區上空45 km左右高度,開始將彈道拉起。考慮到熱防護,彈頭在這一階段近似保持最大迎角飛行。彈道拉起后有一段近似平飛段,在慣性制導系統控制下進行減速控制。最后進行下拉導引控制,控制彈道傾角滿足相關約束,同時命中目標。根據再入機動彈頭彈道的特點,設計如下制導方案:
(1)彈道拉起段
此段由空氣舵產生彈頭最大的可用迎角。轉彎平面內利用的比例導引律產生側滑角指令控制彈頭方向近似指向目標,這樣可以使得彈頭在飛行到下拉導引段時,近似為俯仰平面的控制。
(2)平飛減速段
此段彈頭可以進行減速控制,如錐形減速。即彈頭用于控制彈道傾角的配平迎角為零,并以一定的總迎角繞彈頭速度方向以一定的角速率旋轉。
(3)下拉導引段
此段彈頭俯仰平面內控制由本文給出的末制導律來控制,轉彎平面內由比例導引律控制。這樣可以使得彈頭準確命中目標,同時滿足各終端角度約束。
4 仿真結果及分析
再入機動彈頭再入初始點運動參數為:速度V0=2 000 m/s,彈道傾角 γ0= - 45 °,高度 H0=45 km。終端約束為:目標位置x=70 km,終端法向過載約束 am,end=0。另外,最大迎角約束 αmax=25°,最大側滑角βmax=15°。分別考慮終端彈道傾角約束 γF= -90°,-80°,-70°,-60°的情況,仿真結果如圖2~圖4所示。

圖2 彈道曲線Fig.2 Trajectory profile
圖2 為射程高度曲線,可以看出不同終端彈道傾角約束下,本文制導方法都能導引彈頭準確命中目標,機動彈道明顯的特點為先拉起,近似平飛,最后下拉以一定角度命中目標。
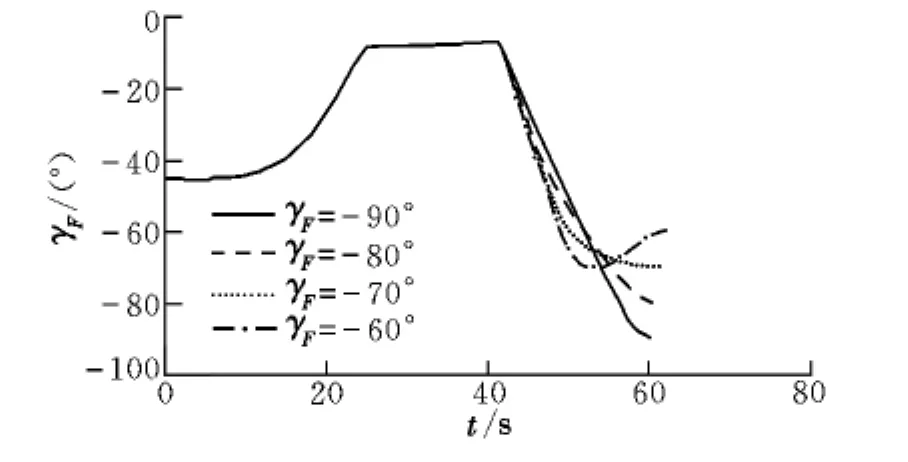
圖3 彈道傾角曲線Fig.3 Flight path angle profile

圖4 法向過載曲線Fig.4 Normal overload profile
圖3 為相應的彈道傾角曲線,仿真結果顯示彈道傾角最終都能滿足約束要求。圖4為相應的法向過載曲線,顯示本文方法最終法向過載非常小,理想情況下的仿真結果終端法向過載小于0.02。
圖5給出了終端傾角約束為-90°情況下,末制導段的滑動變量及其一、二階導數隨時間變化情況。可以看出,滑動變量及其一、二階導數都能漸進收斂到零,滿足相應的終端約束。

圖5 末制導段滑動變量s,s',s″曲線Fig.5 Sliding surface profile in terminal guidance
為了更加清楚地顯示本文制導律在末制導段的特點,對比分析下拉導引段的仿真結果。將本文提出的制導方案(BDTG)與經典的彈道整形制導律(TSGL)在相同條件下進行仿真對比。經典的TSGL[8]為:

式中:nc為指令加速度;Vc為相對速度為視線角速率。設計下拉導引段仿真初始高度H0=10 km,初始彈道傾角γ0=-10°,迎角為0°,分兩種情形進行仿真,分別距離目標縱向剩余射程Rgo=6 km和Rgo=10 km,圖6和圖7給出了仿真結果對比。

圖6 縱向射程6 km時彈道曲線、法向過載曲線Fig.6 Contrast trajectory and normal overload profile for 6 km downrange case

圖7 縱向射程10 km時彈道曲線、法向過載曲線Fig.7 Contrast trajectory and normal overload profile for 10 km downrange case
圖7 的法向過載曲線中,BDTG法仿真結果最開始法向過載為零,是由于末制導律在靠近目標一定距離才開始導引而導致的。從法向過載曲線對比圖可以看出,為了使得最終的法向過載近似為零,本文的制導方法能夠使飛行器在距離目標一定距離時維持一段較長時間大過載的下拉導引,使得彈道迅速下壓,之后法向過載平緩降低到接近零。從彈道曲線可以看出,本文制導方法使得彈道更加快速下壓,轉向垂直狀態。TSGL法的仿真結果顯示,飛行器在靠近目標時,剩余飛行時間較小造成指令加速度較大,最終法向過載容易出現跳動,如果存在氣動、環境等不確定性,則容易造成明顯的脫靶。
在仿真時考慮存在多種擾動情況,進一步驗證本文制導方法的魯棒性。擾動主要有參數不確定性、外界的干擾和測量誤差。參數不確定性主要考慮氣動力系數拉偏和大氣參數不確定性:由于與法向加速度直接相關的是升力系數,在此將升力系數拉偏±20%,大氣密度拉偏±20%。外界的干擾主要考慮縱向風的影響,風向考慮與飛行器飛行方向同向、反向兩種方向,風場數據參考CIRA-86,圖8給出了風速隨高度變化曲線,橫坐標Vwind表示風速。

圖8 風場模型Fig.8 Wind field model
仿真時運用制導律給出指令,需要當前彈道傾角、剩余飛行時間等信息,實際中有測量誤差,可加入高斯白噪聲來模擬。上述三種擾動(氣動力系數、大氣密度正負拉偏和風向)組合,共8種情形,加上理想情形,總共9次仿真結果的終端誤差數據如表1所示(射程脫靶量均較小,小于0.1 m,故表中沒有列舉)。
表中,第1列為仿真的擾動:“同”指風向與飛行器飛行方向一致,“反”則相反;中間的數字代表大氣密度拉偏量,第3個數字代表氣動力系數拉偏量。

表1 多擾動下的終端誤差對比Table 1 Terminal errors of flight path angle and normal overload under multiple disturbances
從仿真結果可以看出,運用本文的制導方法,終端彈道傾角誤差非常小,在10-4量級,最終法向過載小于0.3。由于擾動的存在,運用彈道整形制導律仿真結果的最終法向過載存在較大不確定性,而且彈道傾角誤差相比也大許多。
仿真結果還顯示,彈頭末速度約為900~1 100 m/s,機動彈頭要求撞擊地面的速度為410~1 070 m/s[7],可以進行適當的附加減速控制。本文設計的制導方案中,預留了一段平飛減速段,從圖3中可以看出有一段10~15 s的近似平飛段,可以用于減速控制,初步仿真表明,平飛段錐形減速可以有最大300 m/s的最終附加減速效果。
5 結束語
針對機動飛行器帶終端約束的末制導問題,本文基于反演設計方法,通過設計合適的滑動面,將高階滑模的滑動變量及其一定階導數在有限時間內漸進收斂的特點與各個終端約束相結合,得到能夠滿足終端彈道傾角和法向過載約束要求的末制導律。本文制導律的設計不需要線性化,對多個終端約束逐階設計來滿足要求。在存在多擾動情況下的仿真結果顯示制導律有很好的制導精度,具有一定的魯棒性。同時本文給出的制導方案預留一段近似平飛段,該段可以用于減速控制。
[1] Kim M,Grider K V.Terminal guidance for impact attitude angle constrained flight trajectories[J].IEEE Transactions on Aerospace and Electronic Systems,1973,9(6):852-859.
[2] Kim B S,Lee J G,Han H S.Biased PND law for impact with angular constraint[J].Transactions on Aerospace and Electronic Systems,1998,34(1):277-288.
[3] 趙漢元.飛行器再入動力學和制導[M].長沙:國防科學技術大學出版社,1997:214-230.
[4] Slotine J E,Li W.應用非線性控制[M].程代展,譯.北京:機械工業出版社,2006:173-176.
[5] 賈慶忠,劉永善,劉藻珍.電視制導侵徹炸彈落角約束變結構反演制導律設計[J].宇航學報,2008,29(1):208-214.
[6] Harl N,Balakrishnan SN.Reentry terminal guidance through sliding mode control[J].AIAA Journal of Guidance,Control,and Dynamics,2010,33(1):186-199.
[7] 康佳仁.潘興-2精確末制導技術分析[J].導彈與航天運載技術,1991(12):45-61.
[8] Zarchan P.Tactical and strategic missile guidance[M].Progress in Aeronautics and Astronautics,AIAA,Reston,VA,2012:569-601.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04