智能循跡小車設計*
2015-12-31 09:09:36朱建華
濰坊學院學報 2015年6期
朱建華
(中國冶金地質總局山東局二隊,山東 濰坊 261021)
智能循跡小車是在沒有人工干預的情況下,能夠沿設定路徑自動行駛的安全、穩定運輸車。它是以電磁、光學等作為引導裝置,普遍采用充電蓄電池為行駛動力,通過設計計算機程序來控制它的行駛狀態和滿足其它要求。工業上普遍用來裝載和搬運貨物。例如,在規定路徑上鋪設一條通電漆包線,小車可以通過電磁軌道所帶來的路徑信息進行自動行駛,將工廠貨物自動沿著路徑運送到目的地,大大提高了工作效率。
為保證兩輪小車的直立行走,設計了兩輪小車的硬件和軟件;通過鋪設跑道,即鋪有一條漆包線,漆包線內通有20KHz的方波交流信號,通過對其周圍交變磁場的檢測以實現循跡行駛[1]。
1 直立原理
車模直立的控制可以簡化為倒立擺直立的控制。倒立擺的平衡原理又類似于單擺。單擺能夠穩定在一個位置的原因是當物體離開垂直的平衡位置之后,便會受到重力與懸線的作用合力,驅動重物恢復到平衡位置。在回復力作用下,單擺進行周期運動,而此時的空氣阻力提供了阻尼使其最后穩定在平衡位置。
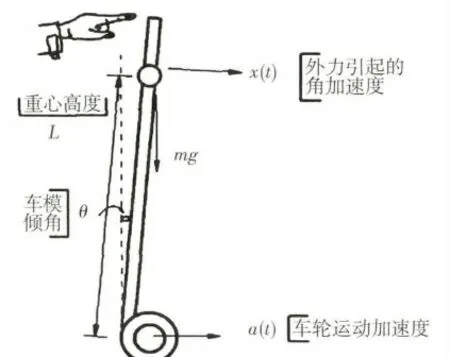
圖1 兩輪車受力示意圖
若要使倒立擺平衡,只需對其增加額外受力,使恢復力與位移方向相反即可。控制倒立擺底部,使得它作加速運動。在受力點上分析倒立擺受力,它就會受到額外的慣性力,該力與倒立擺底部的加速度方向相反,大小成正比。倒立擺所受到的回復力為(式中,θ為車模傾角;θ′為角速度):

增加阻尼力后變為:

控制算法簡化為

只需調整兩個K 參數即可使倒立擺直立。通過類比,即可得到車模的直立控制方案。假設倒立車模簡化成高度為L,質量為m 的簡單倒立擺,它放置在可以左右移動的車輪上。假設外力干擾引起車模產生角加速度x(t)。沿著垂直于車模地盤方向進行受力分析,可以得到車模傾角與車輪運動加速度a(t)以及外力干擾加速度x(t)之間的運動方程。兩輪車直立受力如圖1所示。
車模運動方程:

在θ很小時,簡化為:

車模靜止時a(t)=0:

2 硬件設計
2.1 機械設計
為了保證直立控制的穩定性,盡量保證車模在豎直位置時能夠到達平衡狀態。
前瞻設計:前瞻用來檢測賽道上的交變磁場,實現循跡行駛。其材料采用了碳纖維管。碳纖維管質量輕,具有較強的剛性,為確保兩個電感在一條直線上,將電感塞進碳纖維管兩端。為了方便后期調試,用鐵絲纏繞在縱向桿上,可以方便調整前瞻的長度。在前瞻的橫向桿中間安裝了一個插頭,為后期調試提供方便。前瞻如圖2所示。

圖2 前瞻
電池和電機布置:為了循跡運行,需要將前瞻安裝在車模前面20-40cm 處,為了保證車模在靜止狀態時,車身盡量接近豎直狀態以方便傳感器的布置,需要將電池安裝在車模背面,電機安裝在底部。
傳感器安裝:傳感器包括編碼器、陀螺儀、加速度傳感器。其中陀螺儀和加速度傳感器用雙面膠粘到底盤上,一方面方便以后改變位置,另一方面可以在一定程度上減小振動的影響。編碼器包括碼盤和光點開光兩部分,將碼盤先安裝在塑料柱上,然后用AB 膠粘到主動齒輪上,光電開關用鐵絲固定,方便調整。傳感器安裝如圖3所示。

圖3 傳感器安裝
2.2 電路設計
在PCB 繪制時,考慮到電機對單片機的影響,將單片機安裝到離電機盡量遠的地方,使單片機能夠穩定運行,單片機運行需要5V 電源,其供電采用了7805方案,可以將電池7.2V 的電壓轉換成穩定的5V 電壓,為單片機提供穩定的工作環境。
編碼器使用了光電開關和碼盤的方案,節約了成本;速度信號的采集使用了計數器芯片CD4520,對片內兩路計數器進行級聯,以滿足計數要求;車輪方向的鑒別使用了D 觸發器74LS74,保證了速度反饋的準確性;電機驅動采用MC33883 加四個IRF3205組成H 橋方案,其內阻小,發熱量小[2]。
信號采集電路是將賽道上的電磁信息放大、濾波處理后,將信息經過A/D 轉換傳遞到單片機中,經過單片機的運算處理。信號放大采用的是運算法大器實現的。然后,利用2個二極管把交變信號變成直流信號。接到單片機A/D 口。信號采集電路如圖4所示。
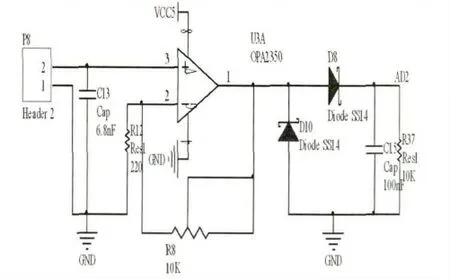
圖4 信號采集電路
電機驅動采用了MC33883來驅動H 橋。H 橋使用的是四個IRF3205,其導通內阻僅有8 mΩ,最大電流可達110A。配合MC33883,IRF3205 的發熱量很小。這為車模的平衡控制創造了良好的條件電路原理如圖5所示。

圖5 電機驅動電路
3 軟件設計
車模控制電路制作與安裝均已完畢。車模是否能夠正常高速穩定運行,需要通過編寫控制軟件和車模調試來完成。
控制程序的編寫主要包括信號采集及處理、直立控制、速度控制、方向控制。
信號的采集:加速度傳感器和陀螺儀輸出的信號為模擬量,通過單片機的ATD 端口轉換為數字量進行歸一化計算和卡爾曼濾波,電感信號同樣為模擬信號,但由于其信號微弱,需要經過運放電路放大再輸入到單片機的ATD 端口。輪速信號由編碼器采集,編碼器產生兩路相差90度的方波型號,通過CD4520對一路方波進行計數,得到方波個數,由74LS74根據兩個方波判斷車輪的轉動方向。這樣就完成了信號的采集。
程序的總體框架:主函數初始化完成后,開啟1ms中斷,中斷服務程序中分為測速、AD 信號轉化及濾波、直立控制、速度控制、轉向控制5個片段,每產生一個中斷執行一個程序片段,5ms執行完一個循環。程序總體框架如圖6所示。
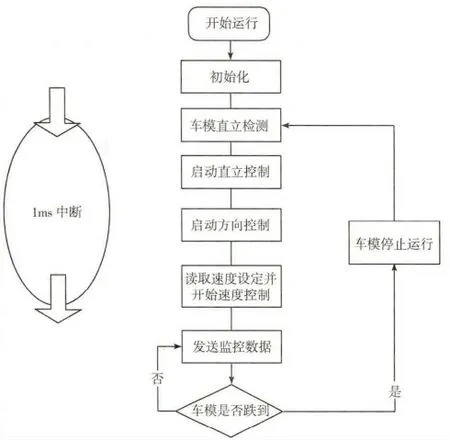
圖6 程序總體框架
中斷服務程序:在程序中使用9S12 XS128 的RTI定時中斷,產生一毫秒的周期中斷。中斷服務程序的任務被均勻分配在0-4 的中斷片段中,每個中斷片段中的任務執行的周期為5 毫秒,頻率為200 Hz。將任務分配到不同的中斷片段中,一方面防止這些任務累積執行時間超過1 毫秒擾亂一毫秒中斷的時序,同時也考慮到這些任務之間的時間先后順序。這些任務包括[4]:
(1)電機測速脈沖計數器讀取與清除。累積電機轉動角度。累積電機速度,為后面車模速度控制提供平均數;
(2)啟動AD 轉換。對加速度和角速度信號進行卡爾曼濾波。
(3)車模直立控制過程。包括車模角度計算、直立控制計算、電機PWM 輸出等。
(4)車模速度控制:在這個時間片段中,又進行0-19計數。在其中第0片段中,進行速度PID 調節。因此,速度調節的周期為100 毫秒。也就是每秒鐘調節10 次。
(5)車模方向控制:根據前面讀取的電磁場檢波數值,計算偏差數值,然后融合陀螺儀的信號進行PID控制。
直立控制:根據前面采集并濾波后的加速度傳感器和陀螺儀信號對電機進行PID 控制。陀螺儀得到的是角速度信號,可直接作為車模傾角的微分量,對其積分可得到車模的傾斜角度,將車模角度和角速度乘以各自相應的系數就可以得到車模電機的控制量。為了避免陀螺儀信號的漂移帶來的問題,通過加速度傳感器得到的Z 軸加速度信號計算出的車模傾角,對陀螺儀信號積分進行修正。
速度控制:根據當前速度和目標速度進行PID 控制。當前速度和目標速度差作為基本偏差,對這個偏差進行積分作為累計偏差,然后分別乘以參數D 和參數P,得到PID 計算的結果。
速度控制周期為100毫秒。讀取兩個電極的光碼盤脈沖進行累加,利用100毫秒的脈沖數量可以反映車模的電機的轉速。車模速度采用兩個電極速度的平均值。為了使得速度具有一定的物理含義,對于所取得的電機速度值需要進行單位轉換。根據定義單位的物理含義,可以確定速度單位轉換的比例值。在本程序中,定義速度的單位是電機每秒鐘的轉動圈數。
為了減少速度控制對于車模直立控制的影響,速度控制輸出量的變化被函數speed control out 均勻分配在20個角度控制函數周期內,這樣可以保證車模的穩定性。
轉向控制:根據兩個電感信號的差值和陀螺儀進行PID 控制,通過兩輪的差速實現車模的轉向。將兩個電感信號求差并求和,兩者之差除以兩者之和,即為基本偏差,陀螺儀信號直接作為偏轉角度的微分量,分別乘以參數P 和參數D,得到方向控制的結果。根據車模采集到的左右兩個電磁傳感器的數值計算出角度控制的量。該函數每10毫秒調用一次。
為了能夠看到程序是否正常執行,安裝一個發光二極管作為指示燈。當發光二極管閃爍時,則程序正常執行。在中斷的最后一個片段里,設置一個變量,最后一個片段每執行一次對這個變量進行加一,當這個數大于某個數是則進行置零,每次置零時對發光二極管的控制引腳取反。這樣,實現了二極管的閃爍[5]。
通過實車調試,當直立控制參數P 為50,參數D 為2.5時,車模可以提供足夠恢復力;速度控制參數P 為70,D 為0.05時,車模可以穩定在一定范圍內來回擺動;方向控制參數P 為350,D 為1.5時,車模可以快速恢復正確位置,且沒有過沖現象,在急轉彎的路況下小車可以在漆包線跑道內達到1M/s的速度。
4 結束語
分析了兩輪自平衡電磁循跡小車的設計思路,提出了該車的總體設計方案。設計了小車的硬件和軟件,鋪設了試車跑道,通過調試,實現了小車的快速、穩定的循跡行駛。
[1]邱關源.電路[M].北京:高等教育出版社,2006.
[2]卓晴.電磁組直立行車參考設計方案[K],2012.
[3]張陽.MC9S12XS單片機原理及嵌入式系統開發[M].北京:電子工業出版社,2011.
[4]雷貞勇,謝光驥.飛思卡爾智能車舵機和測速的控制設計與實現[J].電子設計工程,2010,18(2):91-92.
[5]王宜懷,曹金華.嵌入式系統設計實戰:基于飛思卡爾S12X 微控制器[M].北京:航空航天大學出版社,2011.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00