基于PCHD模型和滑模控制的表貼式永磁同步電機控制系統設計
2016-01-06 08:33:16蘇良昱
電機與控制應用 2015年8期
基于PCHD模型和滑模控制的表貼式永磁同步電機控制系統設計*
蘇良昱
(許昌學院,河南 許昌461000)
摘要:為提高表貼式永磁同步電機(SPMSM)系統的穩定性、抗干擾能力和魯棒性,基于PCHD原理建立了表貼式永磁同步電機的數學模型。基于滑模控制理論,提出了一種表貼式永磁同步電機的速度調整和估計算法,并設計了速度滑模控制器;同時利用滑模觀測器估計電機速度;最后采用MATLAB進行了仿真分析。仿真結果表明: 電機估計轉速與給定轉速能夠較好地吻合,電機速度跟蹤性能較好,基于該速度調節和估計策略的控制系統具有較好的抗干擾性能。
關鍵詞:表貼式永磁同步電機; PCHD; 滑模控制器; 滑模觀測器
基金項目:* 2015年許昌市科技發展計劃項目(1502093)
通訊作者:蘇良昱
中圖分類號:TM 301.2文獻標志碼: A
收稿日期:2015-04-28
SPMSM Control System Design Based on PCHD
Model and Sliding Mode Control
SULiangyu
(Xuchang University, Xuchang 461000, China)
Abstract:In order to improve the stability, anti-interference and robustness of surface permanent magnet synchronous motor (SPMSM), the mathematical model of surface permanent magnet synchronous motor was established based on PCHD theory. The speed adjustment and estimation algorithm of surface permanent magnet synchronous motor were proposed on the basis of sliding mode control theory. And the speed sliding mode controller was designed. The motor speed was estimated by a sliding mode observer. Finally simulation experiments were carried out by using MATLAB. The simulation results showed that the actual speed and estimated speed could fit well and the speed tracking performance was better. This speed set and estimated strategy of control system had good anti-interference performance.
Key words: surface permanent magnet synchronous motor(SPMSM); PCHD; sliding mode controller; sliding mode observer
0引言
表貼式永磁同步電機(Surface Permanent Magnet Synchronous Motor, SPMSM)具有結構緊湊、功率密度高、轉矩慣性比高等優點,但是作為被控對象,其多變量、非線性、強耦合等特點導致在實際應用中存在許多問題[1-2]。目前,廣泛使用的矢量控制和轉矩控制兩種控制方法,雖然能夠獲得較好的動態、靜態性能,但是由于參數的變化、轉矩的波動,系統的魯棒性大大降低[3]。隨著先進控制理論的發展,自適應控制[4-5]、滑模變結構控制[6-8]、無源控制[9-11]等方法逐漸出現在永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)控制中。文獻[12]基于PCHD原理,研究了PMSM建模和速度控制問題;文獻[13]在無源控制的基礎上,設計了開關磁阻電機控制器。針對SPMSM控制過程中存在的非線性問題,本文主要建立SPMSM PCHD數學模型并設計一種基于滑模控制理論的SPMSM控制系統,以提高系統的可靠性和魯棒性。
1SPMSM PCHD數學模型
PCHD系統的形式一般可表示為
(1)
式中:J(x)——反對稱矩陣,滿足J(x)=-JT(x),其用于體現系統內部的互聯結構;
R(x)——半正定對稱矩陣,其光滑性決定于x,用于體現端口附加阻性結構;
g(x)——用于體現系統端口特性;
H(x)——用于體現系統存儲能量。
若忽略系統粘性摩擦因數,d-q旋轉坐標系下SPMSM的數學模型可表示為
(2)
系統的狀態向量可表示為
=D[idiqωr]T
(3)

系統的輸入、輸出量可表示為
(4)
系統的干擾量可表示為
(5)
那么系統的狀態空間方程為
(6)
定義SPMSM的哈密頓(Hamilton)函數為電能與機械動能之和,即
(7)
由式(1)~式(7)可得SPMSM的PCHD數學模型為
(8)
2滑模控制系統設計
SPMSMPCHD調速系統主要由外環速度反饋和內環電流反饋組成。外環速度反饋中,速度滑模控制器[14]生成q軸期望電流,用于內環反饋;而內環電流反饋,基于id=0控制模式,通過電流控制器[15]生成電壓分量ud和uq。無源滑模控制系統結構如圖1所示。

圖1 SPMSM滑模控制系統結構
2.1速度滑模控制器設計
系統狀態變量可以定義為
(9)
那么SPMSM狀態方程可表示為
(10)
為保證系統平滑地達到穩定狀態,切換函數可定義為
s=cx4+x5
(11)
式中:c>0。
同樣,速度滑模控制器的輸出可定義為
u=ε1x4+ε2x5
(12)
(13)
(14)
解方程式(14)得
(15)
式中:c0——常數,若t→∞,x4沿指數曲線趨于零。所以系統可以平滑地實現轉速跟蹤,進而達到穩定狀態。
2.2滑模觀測器設計
在α-β靜止坐標系下,PMSM數學模型可表示為
(16)
Eα=-ψfωrsinθr;Eβ=ψfωrcosθr。
式中: uα、uβ——PMSM電壓分量;
iα、iβ——PMSM電流分量。
若設計滑模觀測器,則數學模型可修改為
(17)

切換函數可設計為
(18)
對式(18)求導可得
(19)
為估計滑模觀測器的轉子速度以及驗證滑模觀測器的收斂情況,選取李雅普諾夫函數[17]為
(20)
若轉子速度為常數,對式(20)求導可得
(21)
將式(19)代入式(21)可得
(22)

(23)
(24)
(25)
式中:αi、βi——均為正數。
上述滑模觀測器的模型如圖2所示。
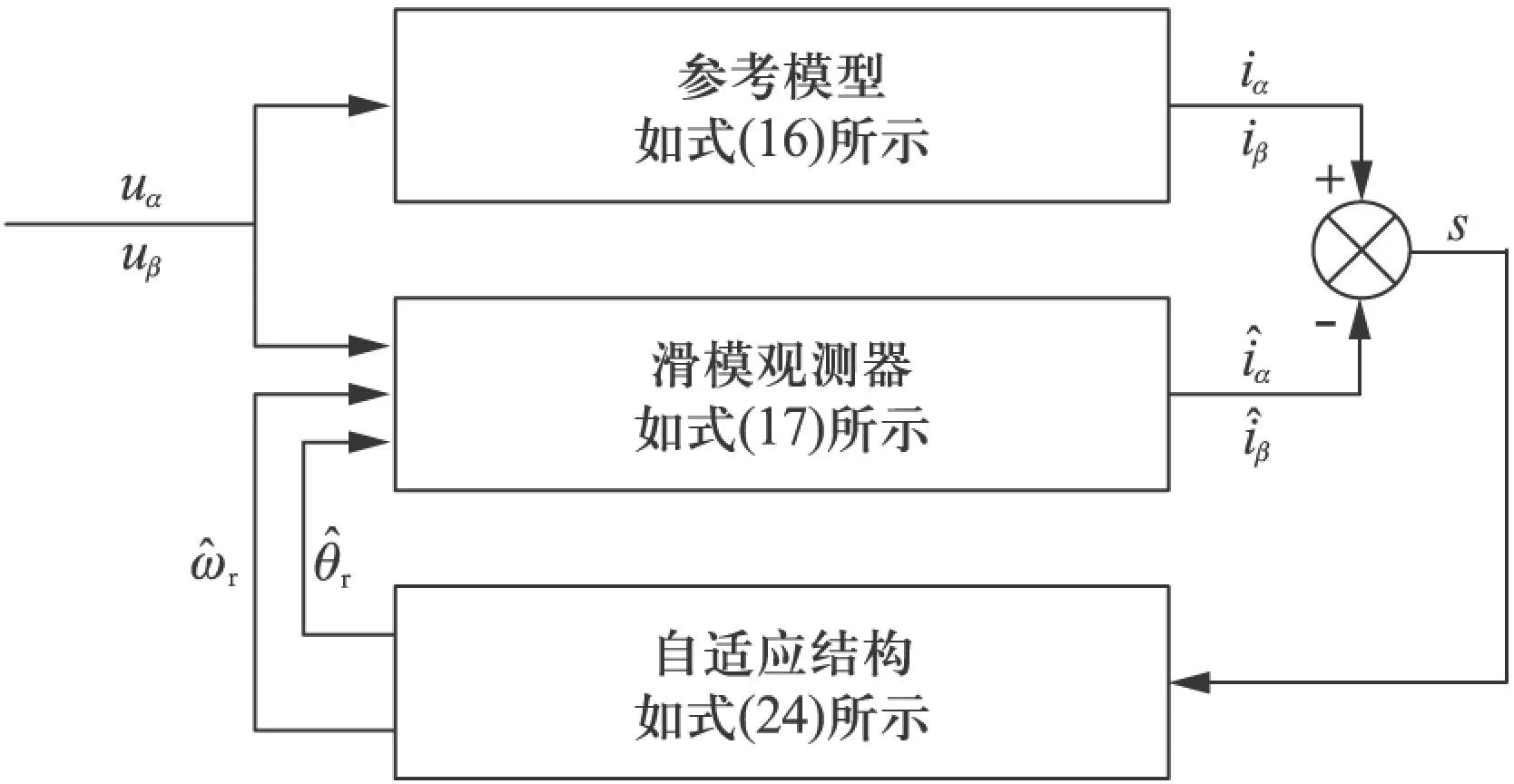
圖2 滑模觀測器模型
3仿真分析
為驗證上述SPMSM PCHD建模方法和滑模控制系統的有效性和可行性,本文采用MATLAB仿真軟件進行了仿真分析。SPMSM的主要參數如表1所示;滑模控制系統的主要參數如表2所示。

表1 SPMSM主要參數

表2 滑模控制系統主要參數
首先,在給定轉速為100rad/s的情況下,空載時,比較SPMSM的給定轉速和估計轉速,轉速曲線如圖3所示。
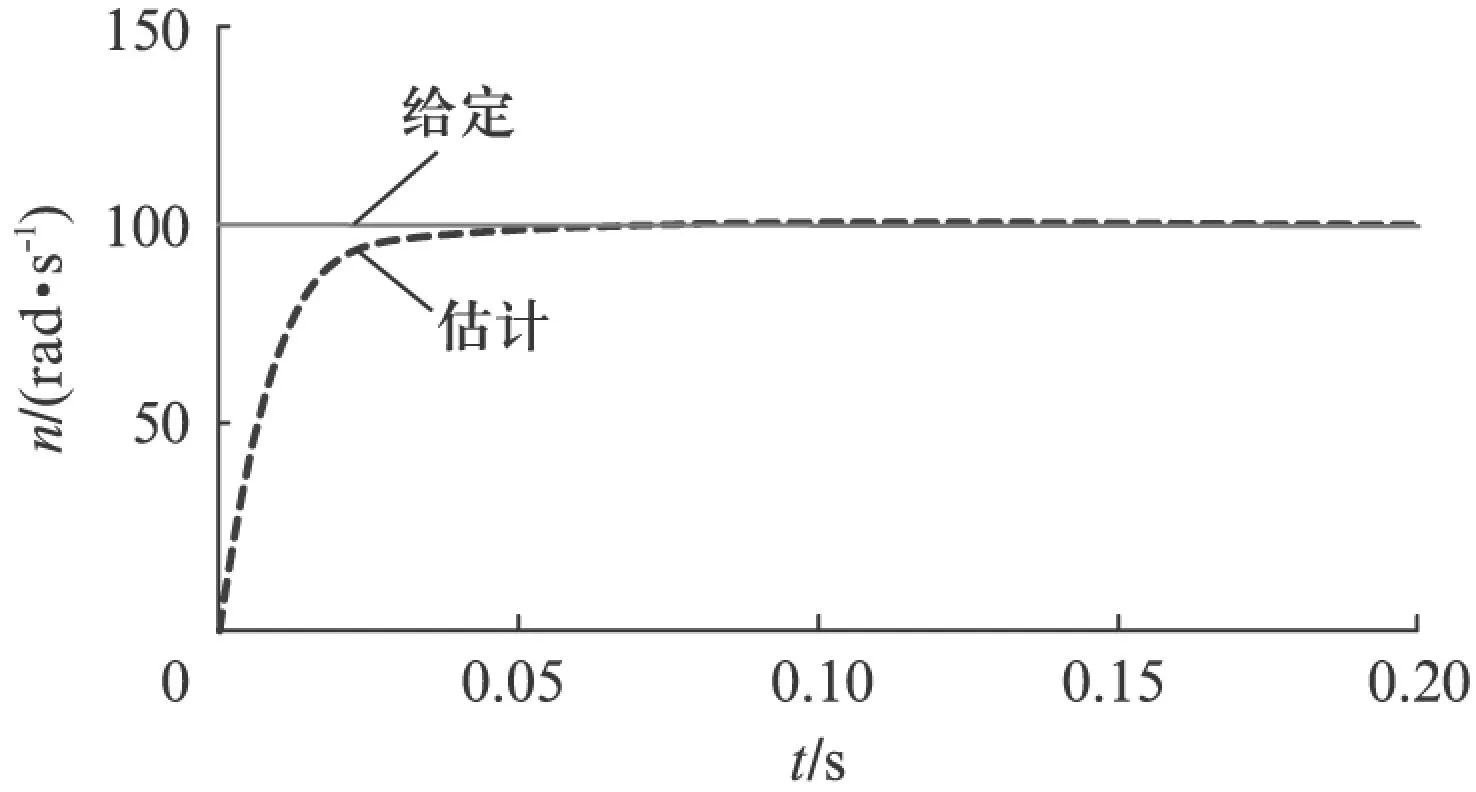
圖3 空載時估計轉速曲線
其次,測試參數變化和負載轉矩擾動對系統的影響。電機給定轉速仍為100rad/s,在0.08s時突加負載轉矩20N·m,在0.16s時去掉此負載;同時將電機的電阻增加2倍,轉動慣量增加2倍,比較SPMSM的給定轉速和估計轉速,轉速曲線如圖4所示。
由仿真結果可知,采用本文所述PCHD數學模型和速度滑模控制器,電機速度跟蹤性能較好,估計轉速與給定轉速能夠較好地吻合;當負載轉矩擾動出現時,給定轉速和估計轉速仍能保證較高的吻合度,擾動出現和消失瞬間轉速波動較小;參數的變化對速度的平滑性影響較小。仿真結果表明: 基于該速度調節和估計策略的控制系統具有較好的抗干擾性能。

圖4 負載突變時估計轉速曲線
4結語
針對SPMSM多變量、非線性、強耦合等特性,為滿足系統的穩定性、抗干擾能力和魯棒性,基于滑模控制理論,提出了一種SPMSM的控制系統。設計了速度滑模控制器用于速度反饋控制;同時設計了一種滑模觀測器用于電機轉速的估計,并進行了仿真分析。由仿真結果可知,基于PCHD模型和滑模控制的SPMSM控制系統具有較好的速度跟蹤性能,可以減小負載轉矩擾動、參數變化等因素對系統的影響,提高了系統的抗干擾性能。本文所述控制系統對PMSM的控制理論和實際應用研究具有一定的借鑒意義。
【參考文獻】
[1]鄭澤東,李永東.永磁同步電機控制系統綜述[J].伺服控制,2009,1(1): 22-25.
[2]陳榮.交流永磁同步伺服系統的現狀與發展[J].電氣時代,2005,9(9): 104-107.
[3]李永東,張猛.高性能交流永磁同步電機控制系統現狀[J].伺服控制,2008,1(1): 34-37.
[4]MARCH P, TURNER M. C. Anti-windup compen-sator designs for nonsalient permanent-magnet synch-ronous motor speed regulators [J]. IEEE Transac-tions on Industry Applications, 2009,45(5): 1598-1609.
[5]張興華.永磁同步電機的模型參考自適應反步控制[J].控制與決策,2008,23(3): 341-345.
[6]方斯琛,周波.滑模控制的永磁同步電機伺服系統一體化設計[J].中國電機工程學報,2009,29(3): 96-101.
[7]LAI C K, KUO K S. A novel motor drive design for incremental motion system via sliding-mode control method [J]. IEEE Trans on Industrial Electronics, 2005,52(5): 499-507.
[8]黃佳佳,周波,李丹.滑模控制永磁同步電機位置伺服系統抖振[J].電工技術學報,2009,24(11): 41-47.
[9]ANGELO C D, BOSSIO G, GARCIA G O, et al. Speed control of PMSMS with interconnection and damping assignment or feedback linearization comm-ents about their performance [C]∥ IEEE ISIE, Montreal, Canada, 2006: 2182-2187.
[10]TSAI H C, CHU C C. Nonlinear STATCOM controller using passivity-based sliding mode control [C]∥ IEEE APCCAS, Singapore, 2006: 1996-1999.
[11]GUO Y, XI Z, CHENG D. Speed regulation of permanent magnet synchronous motor via feedback dissipative Hamiltonian realization [J]. IET Control Theory & Application, 2007,1(18): 281-190.
[12]于海生,趙克友.基于端口受控耗散哈密頓方法的PMSM最大轉矩/電流控制[J].中國電機工程學報,2006,26(8): 82-87.
[13]楊金明,汪小平,趙世偉.開關磁阻平面電機的魯棒控制[J].中國電機工程學報,2008,28(30): 104-108.
[14]鄭劍飛,馮勇,陸啟良.永磁同步電機的高階終端滑模控制方法[J].控制理論與應用,2009,26(6): 697-700.
[15]李偉,游林儒,毛宗源.基于無源性的永磁電機無速度傳感器控制[J].控制理論與應用,2002,19(3): 402-406.
[16]WANG Y H, ZHANG X Z, YUAN X F, et al. Position-sensorless hybrid sliding-mode control of electric vehicles with brushless de motor [J]. IEEE Transactions on Vehicular Technology, 2011,60(2): 421-432.
[17]FOO G H B, RAHMAN M F. Direct torque control of an ipm-synchronous motor drive at very low speed using a sliding-mode stator flux observer [J]. IEEE Transactions on Power Electronics, 2010,25(4): 933-942.

[期刊簡介]
《電機與控制應用》(原《中小型電機》)創刊于1959年,是經國家新聞出版總署批準注冊,由上海電器科學研究所(集團)有限公司主辦的具有專業權威的電工技術類科技期刊。
期刊定位于電機、控制和應用三大板塊,以中小型電機為基礎,拓展新型的高效節能和微特電機技術,以新能源技術和智能控制技術引領和提升傳統的電機制造技術為方向,以電機系統節能為目標開拓電機相關應用,全面報道國內外的最新技術、產品研發、檢測、標準及相關的行業信息。
本刊每月10日出版,國內外公開發行,郵發代號4-199。在半個多世紀的歲月中,該雜志為我國中小型電機行業的技術進步與發展做出了巨大的貢獻,在中國電機及其應用領域享有很高的影響。
依托集團公司雄厚的技術實力和廣泛的行業資源,《電機與控制應用》正朝著專業化品牌媒體的方向不斷開拓創新,在全國科技期刊界擁有廣泛的知名度,是“中國學術期刊綜合評價數據庫來源期刊”、“中國科學引文數據庫來源期刊”、“中國學術期刊(光盤版)全文收錄期刊”,得到了業內人士的普遍認可,備受廣大讀者的推崇和信賴,多次被評為中文核心期刊、中國科技核心期刊、全國優秀科技期刊。