大型上部模塊運動響應短期預報
2016-01-10 06:04:10李春輝吳曉源
海洋工程裝備與技術 2016年1期
關鍵詞:系統
尹 艷,李春輝,吳曉源,王 超
(1.上海外高橋造船有限公司,上海 200137;2.中國船舶工業集團,上海 200137)
大型上部模塊運動響應短期預報
尹 艷1,李春輝1,吳曉源2,王 超1
(1.上海外高橋造船有限公司,上海 200137;2.中國船舶工業集團,上海 200137)
基于三維勢流理論,利用水動力分析軟件SESAM對半潛駁船和半潛式生產平臺大型上部模塊組成的系統在零航速時波浪作用下的運動響應特性進行了研究。結合作業海域的海況條件,采用譜分析方法對該系統在不規則波中的短期響應值進行了預報,為確保大型上部模塊運輸過程的安全性和可靠性提供一定的理論依據。
大型上部模塊;半潛駁船;運動響應;短期響應預報
0 引 言
隨著海洋油氣開發的推進,海上平臺逐漸向大型化、綜合化的方向發展,平臺上部甲板結構的重量和尺寸也不斷增大,使得上部結構的安裝越來越具有挑戰性。起源于20世紀90年代初的浮托安裝法具有安裝速度快、海上調試時間短等優勢,得到迅速的發展,目前廣泛應用于海洋平臺上部模塊的整體安裝[1]。在某項目中,目標半潛式生產平臺上部模塊重量約為32 000 t,在使用半潛駁船進行運輸時,受到波浪載荷的影響,整體的運動響應較大。考慮到模塊運輸過程的安全性和可靠性[2],有必要研究該上部模塊在波浪作用下的運動響應特性。
本文以半潛駁船和半潛式生產平臺大型上部模塊組成的系統為研究對象,采用SESAM軟件對整個系統在零航速時不規則波中的運動響應和短期響應預報進行分析研究。
1 理論分析
1.1 載荷與運動響應傳遞函數
針對駁船和上部模塊組成的系統運動與載荷的譜分析、短期預報和長期預報,提出如下假設:(1)駁船和上部模塊為時間恒定的線性系統;(2)波浪運動和駁船與上部模塊組成的系統運動是平穩的各態歷經隨機過程;(3)波浪頻譜和駁船與上部模塊組成的系統響應均為窄帶譜[3]。
駁船和上部模塊組成的線性系統的水動力載荷響應譜為[4]
(1)
式中:SY(ω)為響應譜密度函數;Sw(ω)為波浪譜密度函數;HY(ω)為傳遞函數RAO;|HY(ω)|為響應幅值。
1.2 短期預報
短期海況波浪幅值及波浪誘導載荷幅值符合Rayleigh分布[5]。相應的概率密度函數為
(2)
該分布只有方差σ2一個參數,可由響應譜按下式直接得到:
(3)
式中:m0為響應譜的零階矩。
由此可獲得整個系統運動短期預報的各種統計值,包括均值、有義值等。其中,單幅有義值的表達式為
(4)
此外,可進一步求得短期響應的最大值。短期響應最大值與有義值的關系為
(5)
式中:n為該變量的短期循環次數,當預報時間為3 h時,其表達式為
(6)
式中:m2為響應譜的二階矩。
2 研究方案
2.1 坐標系選取
水動力計算坐標系原點設在駁船的艉垂線、基線和中縱剖面的交點,x軸向船艏為正,y軸左舷為正,z軸垂直向上為正。該坐標系用于定義濕表面模型和質量模型。浪向如圖1所示,波浪從船艉向船艏為0°,從右舷向左舷為90°。駁船主要有6種運動形式,即縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖[6]。

圖1 水動力計算坐標系定義Fig.1 Coordinate system
2.2 有限元模型
半潛式生產平臺上部模塊是由主甲板以及下沉甲板組成的主體桁架結構,主要型材屬性為方鋼和工字鋼,總長為92 m,總寬為92 m,總重約32 000 t。根據上部模塊整體重量選取50 000噸級的“海洋石油278”半潛駁船,其型線圖如圖2所示。上部模塊和駁船有限元模型如圖3和圖4所示。

圖2 駁船型線圖Fig.2 Barge lines plan
2.3 上部模塊布置方式
在半潛式生產平臺上部模塊上駁船之前,先將上部模塊整體運至碼頭,在上海外高橋造船有限公司現有硬件資源條件下,采用滑道移運的方式進行滑移。有兩種方式將上部模塊移運至駁船處:一種是從艏艉方向,另一種從舷側方向。但如果采用第二種方案,將使上部模塊不能對稱布置在滑道上,會導致滑道受力不均,移運時不利于保證上部模塊的結構強度,因此采用上部模塊沿艏艉方向移向駁船的方案。駁船與上部模塊組成的系統如圖5所示。

圖4 駁船有限元模型Fig.4 Finite element model of barge

圖5 駁船和上部模塊布置圖Fig.5 Layout of barge and topside module
2.4 裝載工況
選取上部模塊上駁船調載后最終達到的吃水狀態為計算工況。表1給出了駁船運輸上部模塊時的相關參數。
2.5 環境條件設定
目標平臺的作業海域為我國南海深水海域。由于JONSWAP譜與南海海域的海浪譜無論是譜峰值的大小還是譜的形狀都比較接近,因此本文選用JONSWAP譜。基于指定的運輸路線和日程,海上運輸安裝環境條件選取為非臺風海況一年一遇的環境載荷:海浪譜為JONSWAP譜,選取平均的譜峰提升因子3.3;波高HS=3.9 m;譜峰周期TP=7.1 s。
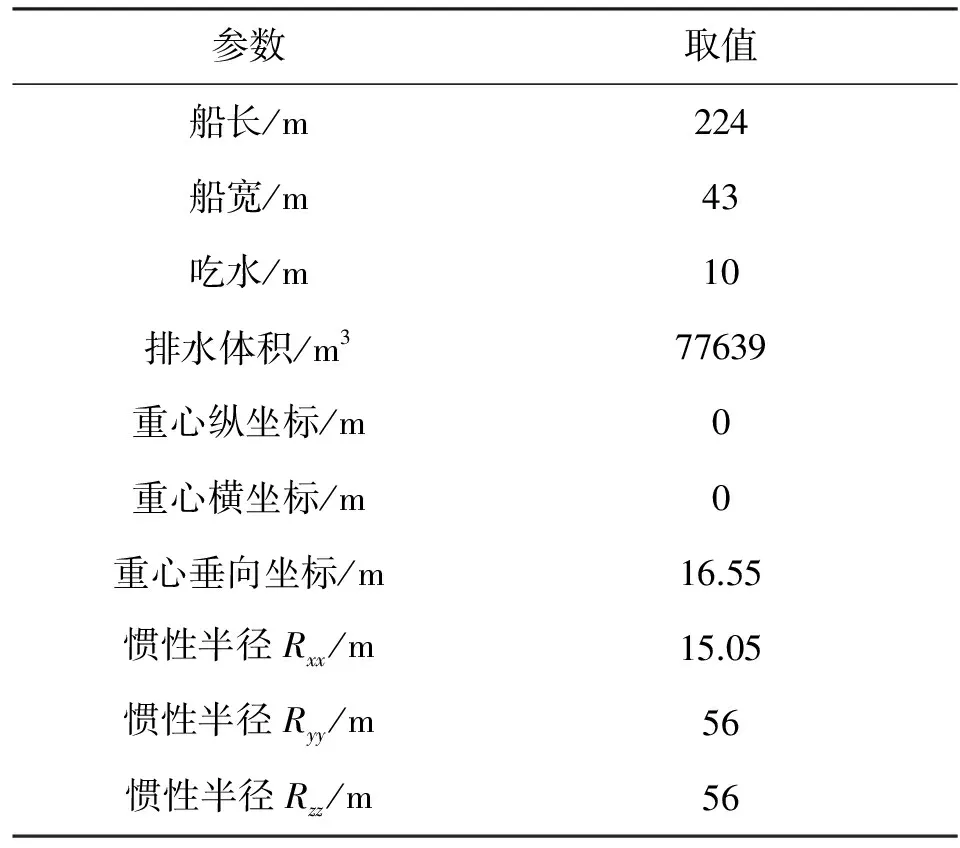
表1 駁船與上部模塊整體參數Table 1 Parameters of the barge and topside module
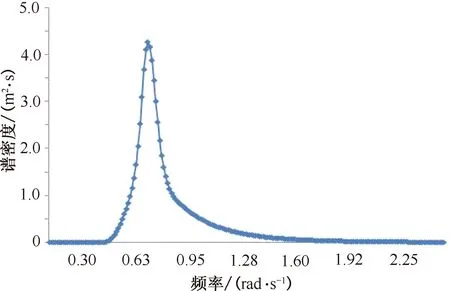
圖6 JONSWAP譜Fig.6 JONSWAP spectrum
3 運動響應分析及短期預報
基于三維勢流理論[7],采用SESAM軟件中的HydroD/Wadam 模塊進行計算,得到駁船和上部模塊整個系統的運動響應RAO后,即可結合相應的海域海況資料,采用譜分析方法對駁船與上部模塊組成的系統在不規則波中的運動響應值等進行預報。
3.1 水動力計算步驟
使用SESAM軟件計算駁船和上部模塊整個系統運動與波浪載荷響應,其具體步驟如下:
(1)通過Genie模塊建立駁船的濕表面模型,如圖7所示;
(2)將建好的水動力模型導入到HydroD 模塊中進行計算;
(3) 用HydroD/Wadam 模塊設定浪向搜索區間為(0°~180°),步長為45°,浪向在0°~180°等概率分布,波浪頻率的區間為(0.1~2.5 rad/s),步長為0.05 rad/s,即可求出對應這些浪向和頻率組合的傳遞函數RAO;
(4)最后采用后處理模塊Postresp計算得出其動力響應。

圖7 駁船的濕表面模型Fig.7 Wet surface model of the barge
3.2 波浪載荷響應幅值
根據選定的設計波,駁船的表面水壓力可以由伯努利方程計算得到。水壓力包括靜水壓力和動水壓力,動水壓力又可分為線性動水壓力和非線性動水壓力[8]。其中線性動水壓力指一階波浪力,非線性動水壓力指的是二階波浪力,對駁船運動響應有影響的主要是一階波浪力。計算結果如圖8~10所示。

圖8 x方向受到的波浪力幅值Fig.8 Amplitude of wave force in x direction
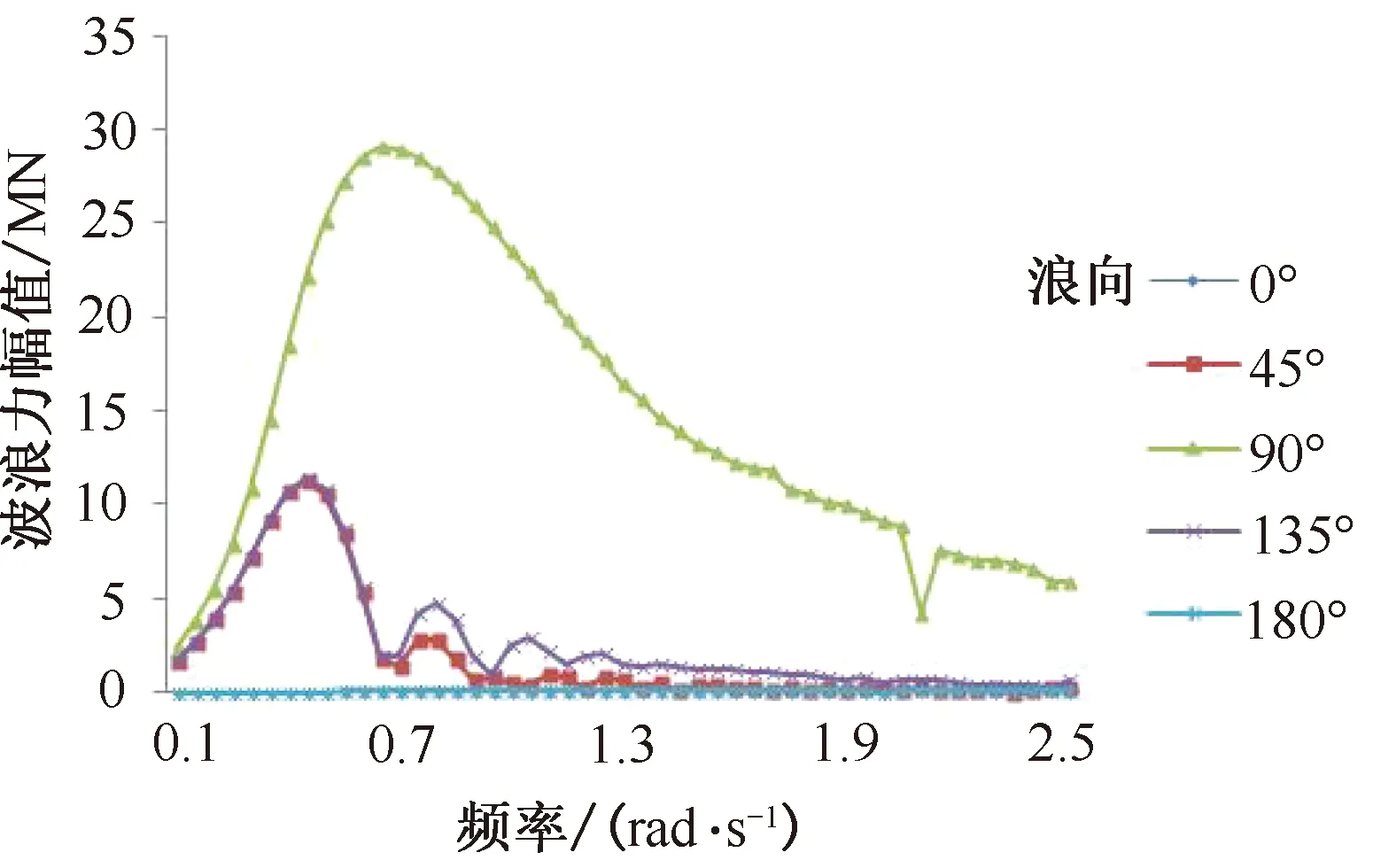
圖9 y方向受到的波浪力幅值Fig.9 Amplitude of wave force in y direction

圖10 z方向受到的波浪力幅值Fig.10 Amplitude of wave force in z direction
3.3 運動響應幅值RAO
從圖11可以看出,浪向為45°時,駁船和上部模塊整個系統的縱蕩、縱搖和垂蕩運動首先隨著波浪頻率的增加而增大,隨后逐漸減小,當波浪的頻率不斷增大趨近于正無窮時,整個系統各個方向的運動趨近于零。駁船的縱搖、橫搖和艏搖運動響應最大值發生在波浪頻率為0.45 rad/s附近。當波浪能量集中頻率范圍接近系統的固有頻率時,整個系統各個自由度的運動都非常劇烈,而當波浪的頻率遠離固有頻率時,整個系統的運動相對平和。所以,為保證安全運營,應該使駁船和上部模塊整體系統的固有頻率避開波浪能量集中頻率范圍。

圖11 縱搖、橫搖和艏搖運動情況下的RAOFig.11 RAO of pitch,roll and yaw motion
對駁船和上部模塊整體系統進行水動力計算,結果如圖12所示。由圖12可知由波浪引起的縱蕩和艏搖運動都比較小,因此本文主要考慮橫搖、縱搖、垂蕩和橫蕩的影響。
從圖12(a)和圖12(c)可知,在該系統的浪向角為90°時,垂蕩和橫搖的運動幅值最大;浪向角為0°時,垂蕩和橫搖的運動幅值最小,并且隨著波浪頻率先增大而后減小。換言之,橫浪對該系統的垂蕩和橫搖影響較大。從圖12(b)可以看出,在浪向角為45°時,系統的縱搖運動幅值最大;對于艏搖而言,在浪向角45°或135°時,艏搖運動幅值最大。

圖12 六個自由度情況下的RAOFig.12 RAO of six degrees-of-freedom motion
3.4 短期預報
在獲得駁船和上部模塊整體系統運動的RAO之后,結合JONSWAP譜,在一年一遇的環境載荷下,進行運動性能的短期預報,得到駁船和上部模塊整體系統在六個自由度的運動幅值。整個系統在每個浪向角下的運動幅值如圖13所示。從圖13可以得知在每種運動情況下的最大運動幅值,結果匯總如表2所示。
從表2可知,在駁船與上部模塊組成的系統運動響應中,垂蕩、縱搖、橫搖以及橫蕩的影響較大,并且在垂蕩運動情況下,最大運動幅值發生在浪向角為90°時;在縱搖和縱蕩的情況下,浪向角為45°時,該系統的運動幅值最大。在垂蕩情況下最大幅值沒有發生在傳統的45°浪向時,縱蕩和縱搖最大幅值也沒有發生在傳統的0°或180°浪向時,說明該系統艏向對浪向的跟隨性不是很好,需要做更進一步的探討。
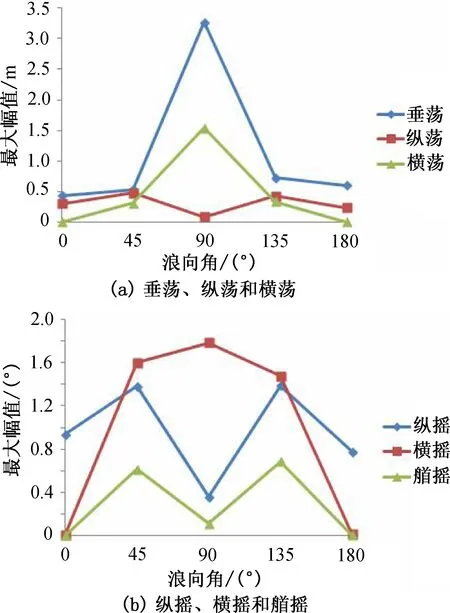
圖13 不同浪向角下的運動幅值Fig.13 Amplitudes in different wave directions

表2 短期預報運動最大幅值Table 2 Maximum amplitude of short-term response
4 結 語
本文依托三維線性勢流理論,運用SESAM軟件中的Genie模塊和HydroD模塊對駁船和上部模塊組成的系統進行了運動響應分析,預報了該系統的水動力響應特性,得到了波浪能量集中頻率范圍。為了保證大型上部模塊運輸過程中的安全性,應該避開此波浪集中的頻率范圍,使該系統具有較小的波浪響應。此外,從短期預報結果中可以得出,在橫搖和垂蕩的運動幅值最大、浪向角為90°時,需要特別關注整個系統的安全性。
[1] 范模,李達,馬巍巍,等.南海超大型組塊浮托安裝的關鍵技術[J].中國造船,2011,51(7):132.
[2] 張大剛,樊之夏,孫偉英.半潛式生產平臺組裝方式及運輸方法研究[C].第十五屆中國海洋(岸)工程學術討論會論文集,2011:295.
[3] 白艷彬.深水半潛式鉆井平臺總體強度分析及疲勞強度評估[D].上海:上海交通大學,2010.
[4] 張朝陽.深水半潛平臺總體強度分析中波浪載荷計算與簡化建模方法研究[D].上海:上海交通大學,2012.
[5] 劉應中,繆國平.船舶在波浪上的運動理論[M].上海:上海交通大學出版社,1988.
[6] 陳海龍,白雪平,劉成名,等.利用SESAM軟件對駁船進行水動力性能分析研究[J].傳感器與微系統,2009,28(12):48.
[7] 劉海霞,肖熙.半潛式平臺結構強度分析中的波浪載荷計算 [J].中國海洋平臺,2003,18(2):1.
[8] 趙林崗,徐升,謝永和.基于SESAM的游釣船動力響應研究[J].浙江海洋學院學報(自然科學版),2010,29(6):572.
Short-TermResponsePredictionforMotionResponseofLargeUpperModule
YIN Yan1,LI Chun-hui1,WU Xiao-yuan2,WANG Chao1
(1.ShanghaiWaigaoqiaoShipbuilding&OffshoreEngineeringDesignCo.,Ltd.,Shanghai200137,China; 2.ChinaStateShipbuildingCorporation,Shanghai200137,China)
Based on the three-dimensional potential flow theory,we study the motion response characteristics of the system of semi-submersible barge and large upper module of semi-submersible production platform under the wave force by SESAM software.Combined with operation sea state,we predict the short-term response values of the system by using the spectrum analysis method,providing theoretical basis for ensuring the safety and reliability of large upper module during the transportation process.
large upper module; semi-submersible barge; motion response; short-term response prediction
2015-09-18
國家工業和信息部項目(工信部聯裝[2012]534號)
尹艷(1988—),女,碩士,助理工程師,主要從事船舶與海洋結構物設計制造方面的研究。
U661.32
A
2095-7297(2016)01-0025-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32